基于TLE5012B的多圈绝对角度传感器设计
2017-11-23马飞越孙大伟
周 秀, 牛 勃, 马飞越, 刘 刚, 孙大伟, 伍 弘
(国网宁夏电力公司 电力科学研究院,宁夏 银川 750011)
基于TLE5012B的多圈绝对角度传感器设计
周 秀, 牛 勃, 马飞越, 刘 刚, 孙大伟, 伍 弘
(国网宁夏电力公司电力科学研究院,宁夏银川750011)
多圈绝对角度传感器是机器人、汽车电子核心部件之一。TLE5012B角度传感器基于集成巨磁阻(iGMR)技术,可检测封装磁场表面360°的变化,实现角度的非接触式测量。提出了三齿轮机械结构与TLE5012B角度传感器相结合的分段函数算法,实现对转轴旋转位置高精度、大量程的非接触式检测,完成角度传感器检测量程与检测精度的解耦。实验证明:利用该机械结构的分段函数算法所设计的绝对角度传感器可以实现检测量程可调,检测精度达到0.5°。
角度传感器; 非接触式; 大量程; 高精度; 分段函数算法
0 引 言
随着电机电器、机器人及汽车工业的发展,人们对电机性能及汽车行驶中安全性、舒适性等的不断追求,高精度、大量程的角度传感器成为了相应工业领域研究的一个热点。目前,TLE5012B高精度角度传感器主要应用于设备精度校准,温度、湿度、灰尘、振动等外界环境,对其检测精度干扰较大,导致该种高精度传感器未在工业中获得广泛应用[1~3]。
本文通过对气体绝缘变电站(gas insulated substation,GIS)设备检查及异物清理机器人摄像头转动角度的测量,设计实现了对转轴转动角度进行高精度检测的角度传感器。该传感器基于三齿轮机械结构、STM8AF微处理器及TLE5012B角度传感器。
1 TLE5012B角度传感器
2 分段函数算法
2.1 机械结构设计
本文所设计多圈绝对角度传感器为应用于GIS设备检查及异物清理的一种机器人,要求由电机驱动的摄像头实现正负3周旋转,具有转速低的特点,但相应的检测精度需达到0.5°以内,从而对GIS内异常信号处的缺陷进行精确定位。基于TLE5012B角度传感器及STM8AF的微处理器提出了一种基于三齿轮机械结构的分段函数算法,三齿轮机械结构如图1所示。

图1 三齿轮机械结构
图1中,测量齿轮B与测量齿轮C分别内嵌一颗径向分布的柱形磁钢并与主齿轮啮合,在磁钢下方贴有TLE5012B角度传感器的印刷电路板(printed circit board,PCB)。当电机带动主齿轮A旋转时,齿轮B与齿轮C将以相同的线位移旋转[5]。
2.2 检测精度提高
基于图1三齿轮机械结构,设齿轮A与B和C的齿数分别为mA,mB,mC,且满足mA>mB>mC。当主齿轮的转动行程为n圈时,齿轮B与C由于旋转相同的位移而分别旋转了nmA/mB,nmA/mC圈。由于检测量程与测量齿轮检测信号差值之间的一一对应关系,主齿轮与测量齿轮的齿数满足

(1)
整理可得
尽管武当众人态度的转变和他们所经受的痛苦不无关系,但说到底还是因为他们心中始终无法放下“正邪有别”的成见,在感情和理智的矛盾中纠结,甚至在莫声谷遇害后怀疑是张无忌所为,只因他是和赵敏有所牵连的魔教教主。

(2)
由式(2)知,在主齿轮与测量齿轮固定的情况下,当主齿轮旋转n圈时,差值信号将出现周期性更新。考虑到GIS检查及异物清理机器人对传感器体积的要求,选取主齿轮齿数为45,齿轮B,C的齿数分别为15,13。TLE5012B角度传感器的检测精度为±1°,所设计角度传感器检测精度理论可以达到±0.33°,则更新周期为780°。
设θ1,θ2为所设计角度传感器某一时刻相对机械零点位置的角度,测量齿轮检测角度分段函数为
(3)
式中β1,β2为测量齿轮所检测到的角度值。由于测量齿轮B,C的检测精度映射到主齿轮时检测精度不同,对式(3)所采集到的角度信号进行均值处理,使其更好地收敛于角度传感器原始的检测精度,具体表达式如式(4)
θ=(θ1+θ2)/2
(4)
TLE5012B输出的角度信号经过坐标旋转数字计算(coordinate rotation digital computing,CORDIC)算法已经转换为线性的角度,当测量齿轮在更新周期时,会发生角度的跃变。偏差表达式如式(5)
Δrel=mB,C/2mA
(5)
由式(2)知,当测量齿轮发生周期更新时,三齿轮差值未发生周期更新,从而通过差值检测角度对其进行校正。式(3)分段函数所检测角度发生跃变,对所测角度根据式(5)进行补偿,实现角度检测的连续性。
2.3 检测量程扩展
通过检测精度提高的分析知上述算法检测量程为780°。而所设计GIS设备检查及异物清理机器人对检测量程要求为±1 080°。在式(3)基础上,以TLE5012B圈数计数功能与差值算法780°更新周期相结合,通过式(6)进行量程扩展
(6)
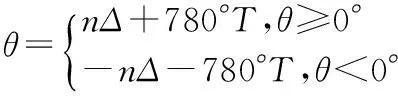
式中 Δ为测量齿轮所检测角度信号差值;θ=0°为GIS设备检查及异物清理机器人摄像头处于回正位置;θ>0°表明此时转轴向右旋转;反之向左。n值如式(2)所示;T为量程扩展的周期,其可以随着检测量程需求的变化而进行调整。与式(6)对应的分段函数如图2所示。
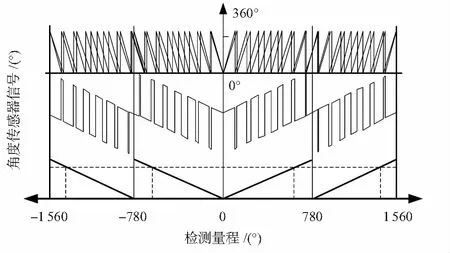
图2 量程扩展原理
图2中当差值信号为负,取其反码,最终可得线性分段函数。由于所设计基于TLE5012B的更新周期为10 ms,量程扩展周期基值780°,所设计传感器检测角度发生780°的大范围变化为周期更新,即量程扩展周期T的变化。
设磁阻式角度传感器的最大理论误差为±Δmax,通过式(1)差值关系使检测误差放大为±2Δmax,式(6)的角度偏差为
Δ=±2nΔmax
(7)
通过式(7)知若通过式(6)对转轴的检测角度进行检测,则检测偏差不能达到0.5°的要求。 因此,将式(7)所检测到的角度信号耦合到测量齿轮B和C的旋转圈数,并采用式(3)算法获取主轴的旋转角度,该算法实现了角度传感器检测量程与检测精度之间的解耦。但差值法在周期之间过渡时,所耦合的测量齿轮旋转圈数将发生跃变且该方法不具备圈数记忆功能。本文通过圈数可靠性流程来实时测量齿轮旋转的圈数检测,如图3所示。

图3 可靠性检测流程
图3中,在没有外界电磁等干扰的情况下满足nC>nB。通过TLE5012B内部圈数寄存器与差值法所得圈数的对比判断所设计角度传感器是否发生掉电及检测数据丢失,若发生则继续对旋转圈数进行检测,保证所捕获测量齿轮旋转圈数的正确。
3 实验验证
电路原理框图如图4所示。所设计角度传感器样机通过稳压芯片将机器人所需电源电压降到微处理器的工作电压。以10 ms为周期与TLE5012B以SPI方式进行通信,通过TJA1050以CAN报文的形式发送至上位机。选择如图5所示10 000 线的光栅编码器角度检测系统进行验证。

图4 硬件原理框图
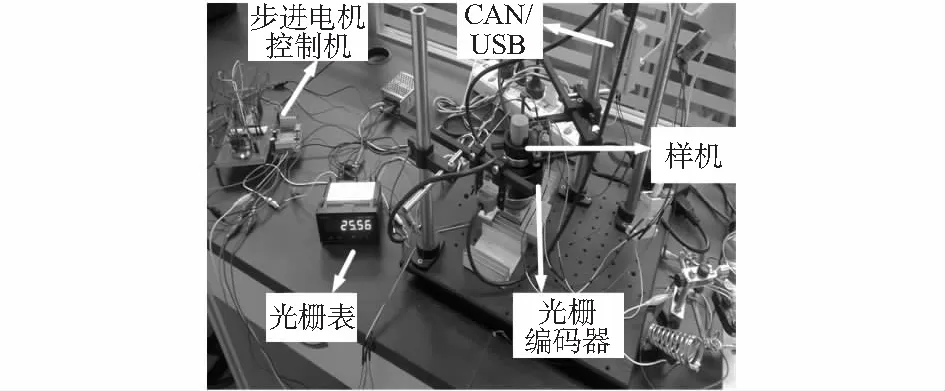
图5 角度传感器检测系统
由图6知高精度光栅编码器与所设计转角传感器采用同轴固定,通过对步进电机的控制,使两者实现同轴旋转,保证所设计多圈角度传感器对转向轴旋转角度检测的可靠性。最后通过控制器局域网络(CAN)/通用串行总线(USB)转换器将检测角度发送至上位机,对分段函数算法的可靠性以及检测精度进行验证。检测结果如表1所示。
图6 上位机接收数据

基值角度分段函数算法角度偏差 基值角度分段函数算法角度偏差-999.36-998.760.40472.68473.100.48-765.36-765.050.31789.84789.66-0.18-432.00-432.07-0.071426.321426.670.35-127.08-127.19-0.111536.481536.41-0.07264.24264.730.49
由表1知:所提分段函数算法的检测量程与检测精度分别可以达到±1 500°,±0.5°,实现了角度传感器检测量程与检测精度之间的解耦。通过对TLE5012B及机械结构的分析可知所设计角度传感器的理论检测精度为±0.3°。检测精度发生偏差是由于齿轮啮合的过程以及所选磁钢的磁场强度分布等原因造成[6]。应用该机器人进行GIS设备检查,如图7所示。

图7 GIS设备检测及异物清理机器人
4 结 论
所设计的角度传感器采用三齿轮机械结构,通过非接触式的检测方法对GIS设备检测及异物清理机器人摄像头的转动角度进行检测。实验验证传感器具有较高的检测精度与检测量程;传感器不仅可以应用于该机器人,通过机械结构的调整,亦可应用于电机转动位移及汽车电子中,具有很高的实际应用价值。
[1] 马飞越,佃忪宜,游 洪,等.GIS罐体内部异物清理机器人的研发与应用[J].宁夏电力,2017,2(2):43-47.
[2] 杨 平,黄妙华,喻厚宇.宽量程方向盘转角传感器系统研究[J].武汉理工大学学报:信息与管理工程版,2014,6(6):829-833.
[3] 杨 财,周艳霞.方向盘转角传感器研究进展[J].传感器与微系统,2008,26(11):1-4.
[4] 张英福.巨磁电阻在方向盘转角传感器中的应用[J].重庆工学院学报:自然科学版,2009,23(10):17-20.
[5] 牛 勃,马新军,江 龙,等.非接触式方向盘转角传感器检测算法的研究[J].湖北汽车工业学院学报,2016,30(4):18-23.
[6] 周良杰,赵志国.方向盘转角传感器误差成因与补偿的研究[J].仪表技术与传感器,2013,11(2):7-10.
Designofmulti-circleabsoluteangularsensorbasedonTLE5012B
ZHOU Xiu, NIU Bo, MA Fei-yue, LIU Gang, SUN Da-wei, WU Hong
(PowerResearchInstituteofStateGridNingxiaPowerCo,Yinchuan750011,China)
Multi-circle absolute angular sensor is one of the electronic core parts of robots and automobiles.TLE5012B angular sensor,based on integrated giant magneto-resistive (iGMR) technology,can detect 360° variation of encapsulated magnetic field surface and accordingly realize non-contact angle measurement.A piecewise function algorithm integrating three-gear mechanical structure and TLE5012B angular sensor is proposed to realize the high-precision and large-range non-contact measurement of the rotation position of the rotating shaft,accordingly decouple the detection range and the detection precision of the angular sensor.The experiment proves the proposed algorithm, based on piecewise function algorithm integrating three-gear mechanical structure,can realize adjustable measurement range,with the detection precision achieve 0.5°.
angular sensor; non-contact; large range; high precision; piecewise function algorithm
10.13873/J.1000—9787(2017)11—0090—03
U 463
A
1000—9787(2017)11—0090—03
2017—09—28
周 秀(1986-),男,硕士,工程师,从事变电设备带电检测、无损检测等方面的研究工作。
