偏置磁场对自旋阀传感器性能的影响研究*
2017-11-23李健平孙宇澄何宁发
李健平, 孙宇澄, 童 杰, 王 辉, 黄 巍, 何宁发
(1.广东科学技术职业学院 机械与电子工程学院,广东 珠海 519090; 2.四川大学 材料科学与工程学院,四川 成都 610065)
偏置磁场对自旋阀传感器性能的影响研究*
李健平1, 孙宇澄2, 童 杰1, 王 辉1, 黄 巍2, 何宁发1
(1.广东科学技术职业学院机械与电子工程学院,广东珠海519090;2.四川大学材料科学与工程学院,四川成都610065)
通过测试自旋阀传感器在沿垂直于敏感轴方向施加偏置磁场条件下的磁场响应曲线,研究了偏置磁场对自旋阀传感器磁滞、非线性度和灵敏度等性能参数的影响。实验结果表明:随着偏置磁场的增加,自旋阀传感器的磁滞、非线性度和灵敏度均减小,并且灵敏度与偏置磁场大小成反比关系。研究结果可为自旋阀传感器的应用提供理论支撑。
自旋阀传感器; 偏置磁场; 磁滞; 灵敏度
0 引 言
自1991年自旋阀[1]材料被发现以来,即受到了广泛关注。由于其具有低饱和磁场、高线性度、易于与硅半导体电路集成等优点,已成功应用于磁场传感器[2~4]、计算机硬盘读头[5~7]、磁电信号隔离耦合器[8~10]及电子罗盘[11]等。在一些应用场合,如电子罗盘中,待测磁场的方向并不一定沿自旋阀传感器的敏感轴,此时,待测磁场沿垂直于敏感轴方向的分量将会起到一个偏置磁场的作用,对传感器的性能造成一定影响。本文利用基于二维亥姆霍兹线圈的磁传感器测试系统,测试了自旋阀传感器在外加不同偏置磁场下的磁场响应曲线,并根据测得的磁场响应曲线分析了偏置磁场对性能参数的影响。
1 实 验
自旋阀传感器可通过一系列类似于半导体集成电路的工艺进行制备[3,12],其基本电路结构如图1所示。自旋阀传感器的基本结构为4个自旋阀电阻条组成的惠斯通电桥,其中,一个对角上的2个电阻器R1,R3的钉扎方向与另一个对角上的2个电阻器R2,R4相反。因此,在信号磁场的作用下,R1和R3的电阻值将变化+ΔR而R2和R4的电阻值将变化-ΔR,从而使整个电桥失衡形成一个正比于信号磁场的电压输出。

图1 自旋阀传感器电路结构示意
图2为实验所用的二维亥姆霍兹线圈,待测自旋阀传感器的敏感轴沿其中一维,则该维与敏感轴平行的线圈可用于产生信号磁场,而另一维则可沿垂直于敏感轴的方向产生偏置磁场。利用此设备,测试了自旋阀传感器在不同偏置磁场下的磁场响应曲线,并根据曲线计算出自旋阀传感器的灵敏度(sensitivity)磁滞(hysteresis)和非线性度(unlinearity)等性能参数。
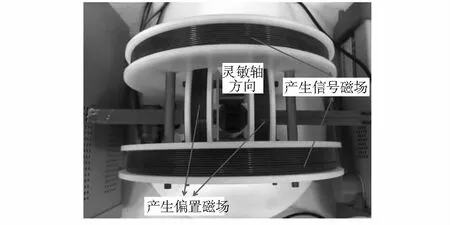
图2 二维亥姆霍兹线圈
图3为自旋阀传感器磁场响应曲线,其中“Forward”代表信号磁场由A向B变化,反之为“Reverse”,Vd为同一信号磁场下,传感器在正、反行程中所对应的输出电压的最大偏差。虚线为上、下两端点(A,B)的连线;ΔV为当信号磁场变化时,传感器输出电压的变化量;ΔH为信号磁场的变化量。本文将以此图为例说明自旋阀传感器灵敏度、磁滞和非线性度等性能参数的定义。

图3 自旋阀传感器磁场响应曲线示意
灵敏度定义为在传感器的线性范围之内的输出电压变化值与信号磁场变化量的比值再除以电源电压即

(1)
式中V为电源电压VCC。
磁滞特性反映了传感器在正向(输入量增大)和反向(输入量减小)行程期间,输入—输出特性曲线不一致的程度,可表示为
(2)
式中Vup为上端点B输出电压;Vlow为下端点A的输出电压。
非线性度反映了自旋阀传感器的实际静态特性输出曲线与拟合直线的偏差程度,可表示为

(3)
式中Vdf为对于同样的信号磁场,传感器的实际特性曲线对应的输出电压与拟合直线对应的输出电压的最大偏差;Vup为上端点B输出电压;Vlow为下端点A的输出电压。
2 数据分析与讨论
图4为自旋阀传感器的磁场响应曲线,根据图4(b)可计算出该传感器的磁滞为2.281 1 %,非线性度为0.726 1 %,灵敏度为0.973 3 mV/(V/Oe)。理论上,自旋阀传感器的灵敏度为
(4)
式中Heff为自旋阀传感器中单条自旋阀电阻器的等效各向异性场,为自由层的单轴各向异性场和形状各向异性场的总和;2Heff反映了自旋阀传感器的理想工作范围;GMR%为自旋阀传感器中单条自旋阀电阻器的磁阻率,反映了自旋阀传感器在工作范围内的总输出。根据图4(a)可测出其Heff为29.4 Oe,进而可计算出GMR%为5.7 %。

图4 自旋阀传感器响应曲线
图5给出了自旋阀传感器在外加0,5,10,20 Oe等不同强度的偏置磁场下的磁场响应曲线,根据图5(b)中的曲线可计算出传感器在不同偏置磁场下的性能参数。在未加偏置磁场时,传感器的磁滞和非线性度分别为2.281 1 %和0.726 1 %,随着偏置磁场的增加,磁滞和非线性度均逐渐下降,偏置磁场增大到20 Oe时,传感器的磁滞和非线性度分别下降为0.012 1 %和0.082 1 %。同样,传感器灵敏度也随偏置磁场的增大而减小,从未加偏置磁场时的0.973 3 mV/(V/Oe)下降到了施加20 Oe偏置磁场时的0.591 4 mV/(V/Oe)。同时,从图5(a)中还可以看出,传感器的饱和磁场随偏置磁场的增大而增大,说明传感器的工作范围也随偏置磁场的增加而增加。

图5 自旋阀传感器在不同偏置磁场下的磁场响应曲线
图6给出了传感器非线性度和磁滞与偏置磁场Hb的关系。从图6中可以看出,无Hb时传感器磁滞为2.281 1 %,随着Hb的增加,传感器的磁滞迅速减小,当Hb增大到10 Oe时,磁滞下降到了0.241 6 %,Hb继续增加时,磁滞仍然保持减小的趋势,但减小的速度放缓。这是由于在Hb的作用下,自由层的磁畴结构更趋于单畴结构,其磁化过程也更符合理想的可逆转动磁化,多畴结构及非可逆磁化等引起传感器磁滞因素得到抑制,因此,随着Hb的增加,传感器的磁滞得到了减小[13,14],同时大约10 Oe的偏置磁场即可将自由层磁畴结构基本转变为单畴结构,故偏置磁场超过10 Oe后,磁滞随偏置磁场增大而减小的速度减慢。此外,若自由层的磁滞被消除后自旋阀传感器对信号磁场的响应应该是完全线性的[14],因此,偏置磁场在减小传感器磁滞的同时也将减小非线性度。
偏置磁场不仅能减小自旋阀传感器的磁滞和非线性度,还可减小传感器的灵敏度。图7给出了偏置磁场对传感器—灵敏度的影响,实线为通过实验数据拟合得到的曲线,曲线方程为

(5)
式中Hb为偏置磁场强度。
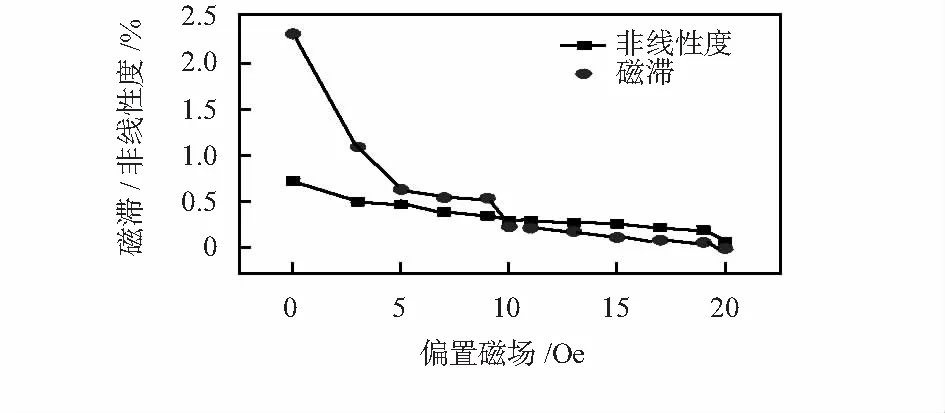
图6 自旋阀传感器的磁滞与非线性度与偏置磁场关系
(6)
由式(6)可见,自旋阀传感器灵敏度与沿垂直于敏感轴方向施加的偏置磁场大小成反比,这是由于偏置磁场展宽了自旋阀传感器的工作范围。对于自旋阀传感器这类线性传感器,其灵敏度可表示为传感器在工作范围内的“总输出”与“总工作区间”的比值,而理论上自旋阀传感器的“总输出”为GMR%,总工作范围为2Heff。偏置磁场的施加可能使自旋阀传感器的工作范围从无偏置磁场时的2Heff增大为有偏置磁场时的2(Heff+Hb),故在外加偏置磁场的条件下,自旋阀传感器的灵敏度为GMR%/2(Heff+Hb)。

图7 自旋阀传感器的灵敏度—偏置磁场关系
3 结 论
利用二维亥姆霍兹线圈磁传感器测试系统研究了沿敏感轴垂直方向施加的偏置磁场对传感器磁滞、非线性度及灵敏度的影响。结果表明:自旋阀传感器的磁滞及非线性度随着敏感轴垂直方向磁场的增大而减小,灵敏度与偏置磁场的大小成反比关系。研究结果可以应用于基于自旋阀传感器的汽车传感器、磁罗盘、电流传感器等系统中,具有较大的应用价值。
[1] Dieny B,Speriosu V S,Parkin S S P,et al.Giant magnetoresistive in soft ferro-magnetic multilayers[J].Phys Rev B,1991,43:1297-1300.
[2] Freitas P,Ferreira R,Cardoso S,et al.Magnetoresistive sensors[J].J Phys Condens Mater,2007,19(4):165221.
[3] Qian Z,Daughton J,Wang D,et al.Magnetic design and fabrication of linear spin-valve sensors[J].IEEE Trans on Magn,2003,39(9):3322-3324.
[4] Qian Z,Wang D,Daughton J M,et al.Linear spin-valve bridge sensing devices[J].IEEE Trans on Magn,2004,40(7):2643-2645.
[5] Heim D,Fontana R,Tsang C,et al.Design and operation of spin valve sensors[J].IEEE Trans on Magn,1994,30(3):316-321.
[6] Kanai H,Noma K,Hong J.Advanced spin-valve GMR head[J].Sci Tech J,2001,37(7):174-182.
[7] Tsang C,Fontana R,Lin T,et al.Design,fabrication and testing of spin-valve read heads for high density recording[J].IEEE Trans on Magn,1994,30(9):3801-3806.
[8] Hermann T,Black W,Hui S.Magnetically coupled linear iso-lator[J].IEEE Trans on Magn,1997,33(9):4029-4031.
[9] Wang D,Tondra M,Nordman C,et al.Prototype spin-dependent tunneling isola-tors integrated with integrated circuit electro-nics[J].J App Phys,2002,91(6):8405-8407.
[10] Qian Z,Wang D,Daughton J M,et al.Magnetoresistive signal isolators employing linear spin-valve sensing resistors[J].J App Phy,2003,93(3):6870-6872.
[11] Pannetier-Lecoeura M,Fermona C,de Vismesa A,et al.Low noise magnetoresistive sensors for current measurement and compasses[J].J Magn Magn Mater,2007,316(9):246-248.
[12] Baubock G,Dang H,Hinson D.MR head wafer fabrication technology:Current and future perspectives[J].IEEE Trans on Magn,1996,32(1):25-30.
[13] Freitas P,Silva F,Oliveira N,et al.Spin valve sensors[J].Sensor and Acuat,2000,81(4):2-8.
[14] Qian Z,Bai R,Yang C,et al.Effective anisotropy field in the free layer of patterned spin-valve resistors[J].J Appl Phys,2011,109(5):103904-103908.
Researchoneffectsofbiasmagneticfieldonperformanceofspin-valvesensor*
LI Jian-ping1, SUN Yu-cheng2, TONG Jie1, WANG Hui1, HUANG Wei2, HE Ning-fa1
(1.CollegeofElectricalEngineeringandMechanical,GuangdongPolytechnicofScienceandTechnology,Zhuhai519090,China;2.CollegeofMaterialScienceandEngineering,SichuanUniversity,Chengdu610065,China)
Effects of perpendicular bias magnetic fields on hysteresis,non-linearity and sensitivity of spin-valve sensors are investigated by testing the magnetic response(MR)curves while perpendicularly apply bias magnetic field to sensitive axis.It is found that the hysteresis,non-linearity and sensitivity all decrease with increasing bias field,and sensitivity is inversely proportional to the bias field.The research results can offer the theoretical support for application of spin valve sensors.
spin valve sensor; bias magnetic field;magnetic hysteresis;sensitivity
10.13873/J.1000—9787(2017)11—0032—03
TP 212.9
A
1000—9787(2017)11—0032—03
2017—08—29
广东省自然科学基金资助项目(2017A030310578,2016A030310305)
李健平(1986-),男,博士,主要研究方向为磁传感器、磁电耦合器件、新能源汽车电池管理系统关键零部件,E—mail:hero-ljp@163.com。
