室内无地图导航系统的设计
2017-11-22梁伟新满红凌荣波梁钰成
梁伟新 满红 凌荣波 梁钰成


摘 要 室内无地图导航系统是基于ARM嵌入式微处理器平台开发的新型导航系统。此系统主要采用主从结构的分布式处理方式,利用摄像头采集室内的图像送到微处理器中进行图像合成,比较输出后利用WIFI网络将信息发送到移动终端,移动终端设备根据实际情况为使用者配置合理的定位路线;移动机器人在接收到移动终端设备发来的路线信息后会主动引领使用者到达指定位置。该系统主要适合于大型博物馆、商场、写字楼等大型建筑的导航,在方便人们生活、提高效率等方面具有重要的意义。
关键词 室内导航 移动机器人 主从结构 WIFI网络
中图分类号:TP311.5 文献标识码:A DOI:10.16400/j.cnki.kjdks.2017.10.017
Abstract Indoor non map navigation system is a new navigation system based on ARM embedded microprocessor platform. This system mainly adopts the distributed processing mode of master-slave structure, sent to the microprocessor for image synthesis using image acquisition camera interior, after comparing the output using the WIFI network to send information to the mobile terminal, the mobile terminal equipment according to the actual situation for the reasonable allocation of user location routing; mobile robot to the mobile terminal device to route information will take the initiative to lead the user to the specified location in the receiving. The system is mainly suitable for large-scale museums, shopping malls, office buildings and other large buildings navigation, in order to facilitate people's lives, improve efficiency and other aspects of great significance.
Keywords indoor navigation; mobile robot; master-slave structure; WIFI; network
在生活节奏不断加快的时代,人们希望做任何事都尽可能地节省时间。因此,不管在家或是在外面,人们总想有助手帮忙处理更多的事情,室内无地图导航系统的设计就是在这种需求下应运而生。利用室内无地图导航系统可大大减少人们在陌生的室内建筑中寻找位置所浪费的时间。另外,基于此技术还可开发出更智能的机器人,为人们解决生活上的问题。
室内无地图导航系统主要由图像采集定位系统、导航机器人、移动终端设备等部分组成。摄像头负责采集室内的图像送给微处理器进行图像合成;移动机器人负责具体的引领和导航功能;移动终端设备主要负责接收、显示室内合成后的图像以及为使用者选择具体的定位地点。
1 系统设计
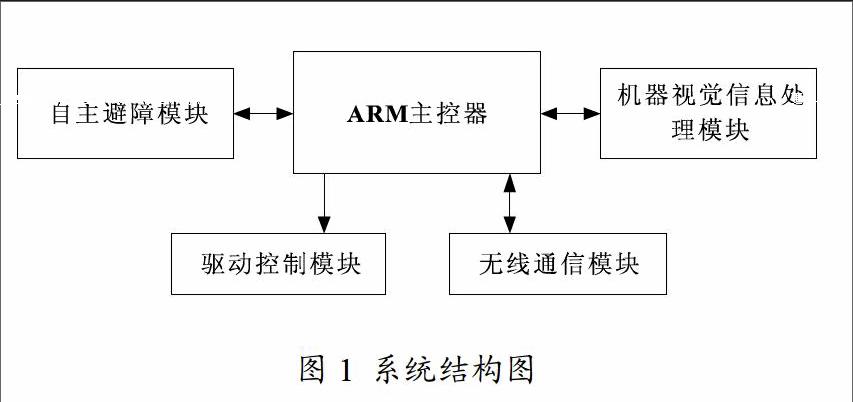
在硬件方面,主要采用主从结构的分布式处理方式,根据控制系统硬件结构和功能需求,采用ARM嵌入式微处理器作为处理平台的核心,协调控制各个子模块系统。子模块主要由图像采集定位、导航机器人、移动终端设备等部分组成。[1]而上位机负责小数据融合、分配任务指令和协调各子模块等工作,具有一定的可靠性和实时性。这种可高效运行的嵌入式设计结构增加了系统的稳定性,便于系统维护。系统结构如图1所示。
在软件部分,采用了先进的图像处理技术和各种算法融合方式,通过不断的学习,增加了机器人的适应性,使其在完全未知的环境下能够顺利工作。利用摄像头将周围图像采集回来后,先进行去噪处理。如果对运动物体进行定位,则利用两帧之差得到图像中運动物体的数据并利用质心法得出该点中心发送给总处理器;如果对特定的运动物体进行追踪,则利用粒子群滤波算法对其进行定位追踪并返回坐标;如果对固定物体进行定位,则是直接将该物体坐标返回给处理器。其软件实现方案如图2所示。
2 导航机器人模块设计
2.1 导航机器人工作原理
本系统的导航机器人主要使用轮形机器人,因为轮形机器人比人形机器人在移动方面上更有优势。导航机器人在空闲状态下会处于待机模式以减少电能的消耗。导航机器人与移动终端设备之间的通讯主要通过WIFI来完成。[2]当导航机器人接收到移动终端设备发来的坐标地址后,导航机器人开始启动,引导使用者到达指定位置。在移动过程中,导航机器人通过超声波进行避障。当导航完成后,导航机器人会寻找附近的停泊点停靠并重新进入待机模式等待下次的使用。另外,导航机器人会在每次使用后检测自身的电量,当自身电量过低时,导航机器人会在停泊点处进行自动充电。
2.2 导航机器人设计
导航机器人采用轮形机器人的主控电路部分采用STM32作为控制的微处理器,在STM32外围搭建导航机器人前轮舵机控制电路、稳压电路、避障电路、电量检测电路、充电电路以及WiFi、蓝牙等通讯电路。
导航机器人的移动和转向主要由H桥驱动电路和舵机控制电路实现,驱动电路每个H桥由两块半桥芯片BTN7971组成,[3]再在外围添加适当的电容、电阻组成完整的桥式驱动电路。电量检测电路主要是检测电池电压,利用电阻串联分压原理,在分压电阻上采集信号送到放大器中进行比较放大,得到的模拟信号通过A/D转换后在数码管中显示;同时STM32也会读取转换后的电压数值与设定的阀值进行比较,当低于阀值电压时,控制导航机器人进行充电状态。endprint
收发数据方面,主控电路中的STM32通过WIFI通讯电路接收移动终端设备发来的定位坐标,主控电路中的WIFI设备IP地址设为固定的IP地址,以便与移动终端设备进行定向通讯。为适应各个设备的使用,稳压电路中进行了3.3V和5V的稳压,分别采用了AMS1117和LM2940兩种稳压芯片。
在避障方面,为了完成机器人在自主移动过程中的自主避障功能,移动机器人需要实时、主动探测与障碍物之间的距离,以免碰撞。为了解决单一传感器所产生的方向性差等问题,本文采用多超声传感器和多传感器融合技术进行测距。
为了在复杂、未知的移动环境中预测出障碍物的位置,采用具有很强容错性和鲁棒性的模糊控制算法,建立障碍物的位置和方向的模糊关系,并规划机器人的正确路径。[4,5]为了补偿温度对超声波速度的影响,采用DS18B20测温器件对外界环境中的温度进行感知,实现测距的精确性和实时性。[6,7,8]超声波传感器的避障模块设计方案如图3所示。
3 导航与定位技术
本系统的移动终端设备的可选择范围比较广,手机、平板电脑、笔记本电脑都可以作为本导航系统的移动终端设备。当使用者手持移动终端设备来到室内建筑时,移动终端设备可通过无线网卡连接到大楼内部的WIFI。连接WIFI后,移动终端设备会接收到建筑内部的图像,使用者在移动终端设备上选择要到达的地方后,移动终端设备就会发送一个具体的坐标地址给附近的导航机器人。[9]使用者在导航机器人引领下就能到达目的地。移动终端的整个收发数据过程都是由WIFI来完成。
3.1 图像采集处理
为提高图像的质量和定位的准确度,本系统采用的摄像头是普通的ov7725摄像头,而整体实物将采用监控红外摄像头,处理的算法基本有高斯模糊、傅里叶变换去噪、otus动态二值化、两帧差、粒子群滤波追踪等。图像处理软件流程如图4所示。
3.2 移动终端设计
移动终端设备主要用来进行人机交互,为使用者提供可操作界面。利用移动终端设备接收系统的导航图像并在移动终端上显示,就需要开发移动终端上的应用程序。移动终端上的应用程序与移动设备的类型有关。根据不同的操作系统,制作相应的应用程序或通过网络下载完善的应用程序源码再通过加以修改。为适应大部分人群的使用,选择以安卓系统为开发平台,利用Eclipse开发软件对应用程序进行制作或修改。把制作好的应用程序下载到移动终端设备上后,打开应用程序就会提示使用者连接到指定WIFI。当连接成功后,应用程序的主界面就会显示建筑内各处的图像,主界面上的图像可通过移动设备的触摸屏进行触点。
4 结束语
室内无地图导航系统是集视觉跟踪和嵌入式系统为一体的自主机器人,该机器人具有低功耗、低成本、独立性强、方便维护、灵活易控的优点,可以实现导航定位、自主避障、无线通信等功能,具有广阔的应用前景。
参考文献
[1] 张军.智能机器人嵌入式系统应用研究[D].北京:北京工业大学,2008:21-22.
[2] 蔡自兴.智能控制及移动机器人研究进展[J].中南大学学报,2005.36(5):724.
[3] 师树恒,赵斌等.基于MK60N512的智能循迹小车设计[J].机床与液压,2014.42(2):91-93.
[4] 王洲,张毅.基于模糊算法的机器人漫游避障的实现[J].微计算机信息,2008.24(102):245-247.
[5] 陈奕君.基于多传感器信息融合的机器人避障研究[D].大庆:东北石油大学,2014.
[6] 李昕颖.基于DSP MC56F8037超声波测距仪的研究[D].扬州:扬州大学,2014.
[7] 赵小强,赵连玉.超声波测距系统中的温度补偿[J].组合机床与自动化加工技术,2008(12):62-64.
[8] 林海波,王晓曦,刘奭昕.一种基于增量式数字PID算法的智能温度控制器[J].长春工程学院学报(自然科学版),2011.5.12;No.4403:86-89.
[9] 郭栋,秦明芝,王伟敏.基于CC2430的Zig Bee无线传感器网络设计与实现[J].物联网技术,2011(1):41-43.endprint
