圆环形声学传感器阵列超指向性理论及方法
2017-11-22杨益新马远良
汪 勇, 杨益新, 马远良
圆环形声学传感器阵列超指向性理论及方法
汪 勇, 杨益新, 马远良
(西北工业大学航海学院, 陕西西安, 710072)
为解决水下无人系统等空间受限平台上传感器阵列尺寸与空间指向性的矛盾, 人们提出了超指向性波束形成方法, 可显著提高尺寸有限传感器阵列的指向性。文章首先对超指向性的研究背景和历史进行综述, 指出其面临的问题及解决的基本途径, 并从原理上将该方法分为最大阵增益和波束图综合两大类。然后,针对常用的圆环形声学传感器阵列的超指向性理论和方法进行了详细介绍。在最大阵增益和波束图综合2种分类的前提下, 从不同的角度, 将圆环阵超指向性方法具体分为相位模态域、差分处理、特征波束分解与综合以及基于特征分解的波束图综合等4种方法, 并详细分析了这几种方法的原理、优缺点、适用范围及相互之间的联系, 给出了部分实验结果, 以期对圆环形声学传感器阵列超指向性理论有一个全面的梳理, 为研究和应用其超指向性方法提供参考。
水下无人系统; 超指向性; 声学传感器; 圆环阵
0 引言
在水雷、鱼雷、自主式水下航行器(autono- mous undersea vehicle, AUV)等小型水下无人系统中, 常常利用传感器——水听器阵列接收目标声信号, 实现探测、识别、跟踪和通信等任务[1]。传感器阵列及其信号处理方法的性能对任务执行效果有着重要影响。由于水下无人系统往往体积较小, 导致其能安装的水听器阵列尺寸有限, 而需要接收利用的目标信号量级又愈来愈小, 因此如何在有限的阵列尺寸条件下实现对弱信号的检测和目标分辨, 是一个亟待解决的问题。超指向性作为一种先进的波束形成方法, 为解决这个问题提供了一种思路。一般而言, 超指向性方法可以在不增加阵列尺寸和阵元数的前提下, 降低适用的频率范围, 获得超过常规方法所能得到的指向性和信噪比增益, 或者在同样的指向性条件下大大减小阵列孔径和减少阵元数。因此, 研究稳健的超指向性波束形成方法, 可为提高小孔径传感器阵列探测弱信号的能力提供有力的技术支撑, 从而也有利于提升水下无人系统的性能。
经过多年的发展, 人们针对不同形式的小尺度传感器阵列提出了各种各样的超指向性方法, 获得了不同程度的性能改善。由于结构简单、没有左右舷模糊以及能够在水平范围内形成主瓣宽度基本不变的波束等优点, 圆环形阵列在声呐、语音信号处理等领域[2-4]有较为广泛的应用, 如图1所示的FLASH航空吊放声呐中的接收水听器阵列(见图1(a))和亚马逊公司生产的Echo智能音箱的传声器阵列(见图1(b), 图中①~⑥为传声器)等。同时, 人们针对圆环形阵列也提出了很多超指向性方法, 但相关方法的优缺点以及相互之间的区别和联系不够清晰, 不利于实际应用。

图1 圆环形声场传感器阵列实例
文中首先从一般化的角度对超指向性的研究进行介绍, 明确超指向性面临的问题以及解决的途径, 然后专门针对圆环形声学传感器阵列, 对其超指向性方法研究的历史与现状、原理与优缺点进行系统梳理, 以期对圆环形声学传感器阵列超指向性问题有一个全面完整的介绍, 为研究和应用相关方法提供参考。
1 超指向性研究历史及现状
1.1 超指向性的提出和早期研究
超指向性的概念最早由天线领域提出, 然后逐渐引入到声学阵列信号处理中。早期比较有代表性的研究有: Schelkunoff[5]在1943年首次证明了等间距端射线列阵可以获得超过10lg() dB的方向性指数(为阵元数目), 但并未提出“超指向性”的概念。1946年Uzkov[6]首先发现了2定律, 即上述阵列的最大方向性指数在阵元间距与波长比值无限小时可达20lg() dB, 但他未给出该定律的数学证明。Pritchard[7]详细计算了线列阵的最大指向性指数, 指出当阵元间距小于半波长时, 可以得到超指向性, 不过此时的权值会呈现大幅值、反相位的特点。Capon[8]于1969年提出了著名的Capon或最小方差无失真响应(minimum va- riance distortionless response, MVDR)波束形成方法, 影响深远。Gerzon[9]在1976年应用广义群理论和广义希尔伯特空间的方法证明了一个轴对称声学换能器的最大指向性因子可以达到2, 其中是总阶数, 同时给出了一个最优波束图形式。Cox等[10-11]明确了白噪声增益可以作为衡量波束形成器误差敏感性的参数, 并通过增加白噪声增益约束获得了稳健的超指向性结果, 使得超指向性方法在实际中应用的可能性大大提高。Parsons[12]给出了一种适用于任意阵列的最大指向性指数证明方法, 该方法基于方向性正交展开, 能够给出最优的权值。
1.2 超指向性存在的问题和现有的解决途径
以上研究表明了超指向性的巨大潜力, 也对其可行性进行了论证, 但未能将其广泛应用。就接收阵列而言, 理论上的优越性能难以在实际中获得的主要原因是方法的稳健性较差, 阵元相位和幅度误差、位置偏移、系统自噪声、通道不一致性、阵元互耦和结构散射等都会破坏超指向性形成的条件。虽然Cox等人在提高稳健性上进行了很多有益的尝试, 但受限于当时的技术水平, 超指向性始终未能走向成熟。
稳健性是超指向性的本质问题, 不受传感器阵列具体形式的影响。如何提高稳健性, 减小随机误差、自噪声和结构散射等影响是成功实现超指向性的关键所在。针对此问题, 人们从不同角度做了大量卓有成效的工作, 可分为以下几类。
1) 从影响超指向性的因素本身入手, 减少误差来源并减小误差量级, 降低系统自噪声以及补偿结构散射等。具体措施有: 采用极低噪声放大器, 优化系统降低自噪声; 严格控制传感器本身特性, 使其幅度、相位误差保持在一定范围之内; 将各通道信号通过同一放大器, 以消除通道不一致性; 优化阵列结构, 尽量减少基阵支架的散射影响; 提高阵列结构的加工精度, 减小阵元位置误差; 利用实测阵列流形进一步补偿误差影响等。虽然受限于现有科技水平, 很多误差不可能被完全消除, 但已有的技术储备足以为获得超指向性创造良好的条件。
2) 对经典最优方法进行改进, 通过增加约束条件提高方法本身的稳健性, 这是最常见的方式, 具体措施有:
①直接对角加载或增加白噪声增益约束[11, 13]。直接对角加载就是对噪声互谱矩阵或空域相关矩阵的所有对角元素同时增加一个合适的量, 然后再由对角加载后的噪声互谱矩阵或空域相关矩阵计算权值向量; 白噪声增益约束可转化为权值向量Euclidean范数约束, 本质上等效于对角加载, 白噪声约束值和对角加载量可相互转化, 但关系较复杂[14], 一般可由2阶锥规划算法直接求解权值向量[15]。此类方法形式简单, 能在一定程度上改善稳健性, 且适用于任意阵型, 但对角加载量或白噪声增益约束值难以确定, 选择太大可能会损失过多指向性, 选择太小则稳健性可能仍然不足。
②多约束优化, 即在白噪声增益、指向性、旁瓣级及主瓣宽度等性能指标之间选取一个作为优化目标, 其他作为约束条件, 然后利用数值方法, 如2阶锥规划, 求解符合要求的权值向量[16-17]。该方法的优点是可以在多个相互关联的性能指标中进行折中, 对阵列形式以及阵元指向性无要求, 但缺点同样明显, 即计算量偏大, 操作不方便, 相关参数不易确定等。
③考虑误差统计特性。Doclo等[18]在已知误差统计信息的条件下, 通过优化平均性能设计出了稳健宽带超指向性波束形成器; Crocco等[19]对此方法进行了改进, 减小了计算量。Doclo等[20]随后进一步研究了基于误差统计特性的超指向性方法, 通过折中平均噪声和扰动能量、最小化与期望指向性的平均误差以及最大化平均指向性因子等措施, 获得了稳健的超指向性结果。Crocco等[21]提出的对指向性和宽带性能一起优化的方法, 其解具有较简单的形式, 但只能得到有限的超指向性。Chen等[22]证明利用误差统计信息提高稳健性在本质上等价于白噪声增益约束, 因此也属于广义的对角加载类方法。Trucco等[23]仍然基于统计类方法的思想, 通过最大化一种广义指向性因子设计出了稳健超指向性波束形成器。统计类方法将误差的统计特性引入到计算当中, 虽然得到了统计平均意义下的稳健超指向性, 但实际中误差的统计特性并不容易估计, 并且此类方法形式也较为复杂。
④其他方式。Pan等[24]提出了一种多步MVDR方法, 通过化整为零的方式避免了直接对噪声互谱矩阵求逆。该方法虽然改善了稳健性, 但得到的只是超指向性的次优解, 并且难以根据实际情况在稳健性和指向性之间进行调节。Berkun等[25]通过组合对角加载和常规波束形成方法, 设计出了具有恒定稳健性或恒定指向性的超指向性波束形成器, 然而该方法只能在指向性和稳健性之间权衡, 难以控制波束形状, 有一定的局限性。Huang等人[26]利用Krylov矩阵的性质提出了一种稳健超指向性方法, 并指出上述Berkun等提出的组合方法是该方法的特例。
3) 建立新的超指向性模型, 如矢量传感器及其阵列技术、Gram-Schmidt(GS)模态波束分解与综合模型[27]等。
①矢量传感器及其阵列技术。矢量传感器在空间一点处同时测量声压、振速甚至更高阶声场信息, 相当于测量了这一点周围一定空间内的声压场, 因此一个矢量传感器就等同于一个由声压传感器组成的小型体积阵, 一个矢量传感器阵列就相当于是由这些小型体积阵组成的大孔径阵列[28, 29], 因此可以获得更好的指向性。由此可见, 从器件设计的角度看, 矢量传感器是一种比声压传感器更新的接收器, 但由矢量传感器及其阵列接收到的振速或更高阶声场信息同样需要进一步处理才能提取出所需要的有用结果, 因此, 从最终信息提取的角度看, 矢量传感器及其阵列也可以看成是一种超指向性处理模型。由于矢量传感器可以在较小的尺寸条件下获得不错的指向性, 并且Nehorai等[30]已经证明声矢量传感器可纳入经典的信号处理框架, 使得很多成熟的方法能够直接得以应用, 因此人们对矢量传感器及其阵列技术表现出了浓厚的兴趣, 相关研究成果层出不穷[29, 31-36]。实际工程中, 得益于材料科学和微机电技术的进步, 矢量传感器技术在近20多年时间内获得了长足的发展, 人们已经研制出了多种形式的矢量水听器和矢量传声器, 如Microflown声学传感器[37], 同时也有针对性地提出了很多适用于矢量传感器阵列的波束形成方法[35-36, 38-39]。
② GS模态波束分解与综合模型。在给定阵列形式和频率的条件下, GS模态波束分解与综合模型利用GS正交化过程给出了超指向性最优权值向量的精确闭式解, 进而可以将最优波束及其对应的最大指向性因子分别分解为不同阶数的GS模态波束及其指向性因子, 然后通过选择合适的GS模态波束合成稳健超指向性波束[27]。仿真设计实例表明, GS模态波束的稳健性随阶数的升高而下降, 因此可通过降秩处理获得稳健的超指向性波束。GS模态波束分解与综合模型通过先分解后综合的方式大大简化了波束形成的过程, 从而为超指向性的实现带来很大便利。由于所有结果均直接来自于超指向性的最优解, 因此, GS模态波束分解与综合模型可应用于任意阵型, 且不需要误差的先验信息。
1.3 现有超指向性方法的分类
以上针对传感器阵列超指向性面临的问题所提出的解决方法, 均适用于任意形式阵列, 因此可直接应用于圆环形声学传感器阵列。
为更好地对这些方法进行区分, 也为进一步研究超指向性理论提供便利, 有必要对已有的理论和方法进行适当的分类。实际上, 上节已经从提高稳健性的角度进行了划分, 该节将从基本原理的角度再进行分类, 以期对已有超指向性理论和方法有一个更为全面的概括。
从原理上看, 大致可将现有超指向性方法分为以下2类:
1) 在空间各向同性均匀噪声场中最大化阵增益的超指向性波束形成方法, 其原理是在满足相关约束条件下使阵列输出的噪声功率最小, 即最大限度地提高阵增益。MVDR方法便是典型例子[8, 40], 同时在其基础上提出的各种稳健超指向性方法也属于这一类, 如对角加载方法[13]、白噪声增益约束方法[11, 41-42]以及多约束优化方法[16-17]。
最大阵增益类方法是获得超指向性最直接的方法, 但其需要计算噪声互谱矩阵, 而这在实际应用中往往会有困难。对于复杂结构阵列, 噪声互谱矩阵的计算常常需要借助于有限元和边界元等数值算法完成。
2) 基于波束图综合的超指向性方法, 一般分为期望波束拟合和波束图直接优化2种形式。
期望波束拟合一般是给定期望波束(具有超指向性), 运用优化设计理论, 求出某种优化意义下的最优权值向量。阵元域的波束图综合方法, 很多时候都被表述成一个二次规划问题, 然后采用各种各样的自适应或迭代算法使得合成方向性与期望方向性以某种准则逼近, 而这种准则最常用的是最小均方误差, 即Euclidean范数准则。鄢社锋等[43]借助2阶锥规划, 通过对波束主瓣和旁瓣分别采用不同范数准则逼近, 能得到不错的指向性。该方法可适用于任意形状基阵, 且可考虑阵元的方向性。
直接优化方法通过直接优化波束图来获得优于常规方法的指向性, 不需要拟合期望方向性, 同时也可避免对噪声互谱矩阵的直接依赖。应用于直线阵的Riblet-Chebyshev方法[44]可获得等旁瓣的超指向性波束, 是具有代表性的直接优化方法之一。凹槽噪声场法[45]或Olen法[46]通过人为地在旁瓣区域放置若干虚拟干扰源, 通过迭代计算得到低旁瓣的超指向性波束。该方法不受阵元方向性和阵列形式的影响, 适用范围较广。另外, 鄢社锋等[16]提出的最低旁瓣波束形成方法实际上是把Riblet-Chebyshev方法推广到了任意阵型。随后他们对该方法进行了改进[47], 提出的抗阵列流形误差的稳健低旁瓣波束形成方法, 能够在给定误差范围内使得最差旁瓣级最小, 从而获得不错的超指向性结果。Yan等[48]还提出了一套宽带恒定束宽波束图综合方法, 通过最小化不同频率波束主瓣区域间的误差并控制旁瓣大小可以得到较好的宽带超指向性波束。以上2种方法同样适用于任意阵型, 对阵元特性亦无特殊要求, 但都不存在解析解, 需要利用2阶锥规划方法进行数值求解, 计算量偏大。
2 圆环形声学传感器阵列超指向性方法
对于圆环形阵列而言, 以上介绍的方法可直接应用, 但这些方法大部分都是利用数值计算的方式获得最终的超指向性波束, 未能充分利用圆环形阵列具有的特殊性质, 因而未能给出解析闭式解。该章将介绍现有的几类专门针对圆环形阵列的超指向性方法, 简要描述其原理, 并指出各自的优缺点, 为理解和使用相关方法提供参考。
2.1 相位模态域方法
基于相位模态理论的波束形成方法, 利用圆环阵型的对称性, 将入射声场进行正交分解, 得到正交的圆环谐波分量, 然后乘以相应的系数, 获得所需要的指向性[49]。
Davies[49]较早研究了相位模态理论, 但未引起大规模的关注。Meyer[50]基于相位模态理论, 研究了安装在刚性球体表面圆环阵的相位模态域方法, 可以方便地合成期望波束图。Meyer的工作引起了较多研究者的重视, 随后相关成果层出不穷。Teutsch[51]在其专著中对于圆环阵的相位模态域波束形成理论有较为全面的论述。蒋伟[52]对圆环阵相位模态域的最优超指向性方法也进行了较详细的讨论, 给出了超指向性的解析解, 可以获得较大的指向性指数。钱琛等[53]针对球形刚性障板表面圆环阵, 给出了阵元域和相位模态域权值向量的关系, 可由阵元域优化波束间接得到不同阶数下的相位模态域超指向性波束。由于需要利用广义逆矩阵求极小范数最小二乘解, 相位模态域间接方法得到的最终波束有时会不符合设定的约束条件。汪勇等[54]随后改进了该方法, 提出了相位模态域直接优化的超指向性波束形成方法, 并针对有限长和无限长刚性柱体表面圆环阵进行了详细计算, 结果表明, 相位模态域直接优化方法可以获得符合所有约束条件的最优波束。类似于Rafaely针对球形阵列的工作[55], Parthy等[56]和钱琛等[57]分析了空间混淆误差、阵元位置误差以及输入噪声对圆环形阵列相位模态域方法性能的影响。此外, Parthy等[58]还利用相位模态理论进一步研究了圆环阵的宽带性能。针对圆环阵在相位模态域中目标方位估计性能的研究, Tiana-Roig等[59-60]和Torres等[61]均做了大量工作。Zou等[34]研究了一个安装在弹性柱体表面的矢量圆环阵, 结合相位模态理论提高了方位估计能力。杨德森(Yang)等[62-63]也利用相位模态理论对矢量圆环阵的方位估计性能进行了详细研究, 并给出了实验结果。
原理上, 相位模态理论将波束形成器分解为特征波束形成器和模态波束形成器2个独立部分, 其中特征波束形成器将频域信号转换为正交的圆环谐波, 这些圆环谐波是球坐标系或柱坐标系下波动方程的特征解, 代表声场的一些特性, 类似于矩阵的特征向量, 因而称为特征波束[64]。为和下文有关概念进行区分, 记为PM(phase mode)特征波束。
对于实际中阵元数有限的离散圆环阵, 假设阵元无指向性, 可得到PM特征波束为
模态波束形成器与传统的波束形成器有较大的区别, 传统波束形成器的输入信号为频域信号, 而模态波束形成器将PM特征波束输出作为输入信号。对应阵元域对每个阵元接收到的信号进行复数加权求和, 相位模态域波束形成方法最终得到的波束可以表示成PM特征波束乘以复模态系数再求和的形式, 即波束响应为
也可写成如下向量形式


模态系数除了可以由期望波束拟合的方式获得外, 也可以通过如优化计算等其他方式得到, 因此可依据计算模态系数方式的不同, 对相位模态域方法进行区别。
基于相位模态理论的波束形成方法之所以受到人们的关注, 主要是由于其具有以下优点: 形式较为简单, 这是由于进行了近似处理, 舍掉了其他高阶项; 分离开了与频率相关和不相关的项, 使得进行宽带波束形成更为容易; 将超指向性波束形成分解为多个独立模块, 如声场采样模块、相位模态分解模块以及指向性合成模块等, 因此可在各个模块内控制误差, 防止误差的累积, 更有利于稳健性的提高。然而, 此类方法需在满足Nyquist采样准则下舍掉部分声场信息以近似得到谐波分量, 其中谐波的最高阶数和适用频率范围均受阵元数限制。Teutsch[51]已明确指出采样误差无法完全避免, 并通过计算表明, 采样误差的大小随频率和模态阶数的升高而变大, 而增大阵元数可减小此类误差的影响。对于最终的波束输出而言, 离散采样导致了空域混淆误差, 并且该误差同样随频率和模态阶数的升高而变大。Parthy[56]等和钱琛等[57]均研究了混淆误差对圆环阵相位模态域波束形成方法性能的影响。在此基础上, Alon等[65]提出了抗混淆误差的方法, 使得相位模态域方法的使用频率范围得以扩展。然而, 该方法本质上只是一种后续处理措施, 没有从源头上消除混淆误差。就超指向性而言, 相位模态理论在原理上并不精确, 其存在的各种误差对性能的影响具有不确定性, 因此该模型仍然难以让人满意。
2.2 差分处理方法
本质上, 普通的压差式矢量水听器只是1阶超指向性传感器的近似[66], 其能提供的信噪比改善十分有限, 因此人们不得不去研制高阶矢量传感器。实际上, 通过声压的有限差分(difference approximation, DA)可近似得到高阶声场信息。基于此, McConnell和Jensen[67]公布了一种圆环形2阶声场传感器, 如图2所示, 可以获得7 dB的指向性指数。该一体化传感器的研制目标是替代拖曳阵中使用的矢量水听器、现有浮标声呐中使用的水听器。
Benesty和Chen等[68-72]提出了一套系统的差分传声器阵列设计方法, 本质上是用经典的波束形成技术合成差分阵具有的特定超指向性波束, 与传统的差分阵处理方法有所区别。具体而言, 他们提出了2种设计差分传声器阵列的方法。
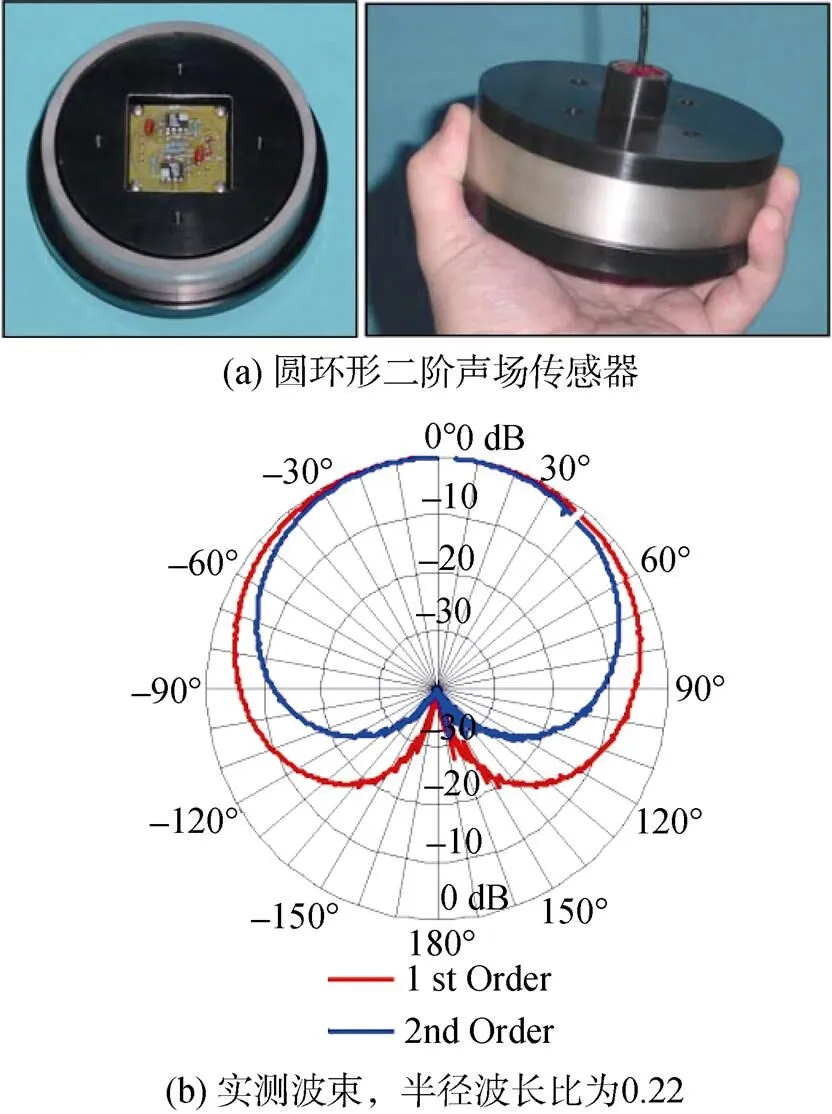
图2 圆环形2阶声场传感器及测试结果
一种方法是设计合适的权值向量, 使得合成的波束满足给定的约束条件, 如无失真和零点约束条件。权值向量通过求解下述线性方程组得到


上式与线性约束最小方差(linearly constrain- ed minimum variance, LCMV)方法的结果类似。该差分处理方法需选择合适的约束条件才能合成满意的期望波束, 而选取这些约束条件在实际中有时会比较困难。
另一种方法的原理是基于有限级数展开拟合期望波束, 具体而言, 对于直线阵使用有限MacLaurin级数展开, 而对于圆环阵则使用有限Jacobi-Anger级数展开。其权值向量也是通过求解线性方程组得到, 即


权值向量同样可统一表示为
这里介绍的差分处理方法直接用于合成特定波束, 从信号处理角度看, 应属于波束图综合类方法, 具有此类方法的优点。然而, McConnell和Jensen使用的差分处理方法虽然形式比较简单, 但其实际上是由声压传感器阵列近似求取声压梯度, 而近似的精确度只有在阵元间距远小于波长时才能得到保证, 因此频率较高时, 模型误差对最终结果的影响难以忽略。同时, 若要获得更高阶超指向性, 就需要更多阵元数和更大的阵列尺寸, 而这又会导致更大的近似误差, 使得超指向性性能下降, 由此形成一种悖论。Benesty和Chen等提出的方法[68-72]虽然用经典的波束形成方法设计差分阵, 但仍然存在约束条件难以得到和较高频率时精度不够的缺点。
2.3 特征波束分解与综合模型
理论研究表明, 最理想的超指向性模型应该是本身不存在任何误差, 并且能提供误差分析的清晰表达式, 可以给出稳健实施超指向性的具体措施, 同时操作不应过于复杂, 而相位模态理论、矢量传感器模型均不满足这样的要求。与之相对的是, 前文介绍的GS模态波束分解与综合模型给出了一种符合条件的超指向性方法, 应受到重视。针对圆环形阵列, Ma和Wang等[74-75]提出的一种特征波束分解与综合 (eigen-beam de- composition and synthesis, EBDS) 模型, 充分利用了该阵型的特殊性质。该模型直接从超指向性最优解出发, 利用空间均匀噪声场中圆环阵噪声互谱矩阵是循环矩阵的特性, 将最优波束、最大指向性因子和误差敏感度函数分别表示成了有限阶特征波束及其指向性因子和误差敏感度函数的叠加和形式, 且该过程不受空间采样的限制, 所得的结果没有任何理论上的误差。同时, 不同阶特征波束的误差敏感度函数具有不同的稳健性, 而最终超指向性波束的稳健性由所选取的最高阶特征波束决定, 因此可以通过一种降秩处理技术, 即根据实际情况舍去不稳健的高阶特征波束而选取合适的稳健低阶特征波束合成最终超指向性波束。相较而言, 该模型比GS模态波束分解与综合模型更适用于圆环形阵列。特征波束分解与综合模型的基本原理如下。
能够得到理论最大指向性因子的最优权值向量如下式所示




其中




水池实验结果证明了EBDS模型的良好性能。以半径波长比为0.185时的结果为例, 得到指向性指数为12.2 dB, 比常规方法高8 dB左右[75], 在半径波长比小于图2所示圆环形差分阵情况下也比其指向性高5.2 dB, 见图3。另外, Wang等进一步将EBDS模型应用到双层同心圆环形阵列[78]和圆环形矢量传感器阵列[79], 给出了2种不同类型阵列的超指向性精确闭式解, 为实现其高阶超指向性提供了坚实的理论支撑。

图3 圆环形水听器阵列及利用特征波束分解与综合模型得到的水池实验结果
实际上, 从最大化阵增益的角度看, 相位模态域方法只是与EBDS方法的近似, 且近似误差随频率的升高而变大。相对而言, 相位模态域方法具有较简洁的表达形式, 同时该方法所采用的适当近似也有利于更好地理解EBDS方法的性能。然而, EBDS模型由于没有涉及任何模型误差, 理论上对于获取高阶超指向性更具优势。
2.4 基于特征分解的波束图综合方法
相位模态域直接优化方法[54]、EBDS方法[74-75]都是从最大化阵增益的角度给出了不同的超指向性解, 这几种方法的共同之处都需要计算空域相关矩阵或噪声互谱矩阵。对于某些安装在复杂支架上的阵列, 该矩阵求解较为麻烦。前文已指出, 利用波束图综合方法, 在不依赖于空域相关矩阵条件下也可获得超指向性, 并且在较宽频率范围内容易保证波束形状的恒定, 这对于宽带信号的处理具有重要意义[18-19, 21, 80-82]。此类方法具体可分为期望波束拟合和直接优化2种形式。
该节介绍圆环形阵列的宽带超指向性波束形成, 方法是求取权值向量使得期望波束和合成波束之间的均方误差最小, 属于期望波束拟合类方法。文献中已有很多求取权值向量的方法[48, 83-85],其中大部分都适用于任意阵型, 但就圆环阵而言, 这些方法均没有充分利用该阵型的优点, 并不是最佳选择。实际上, 合理选取期望波束并利用圆环阵特有的对称性, 可得最优权值向量的精确闭式解[86-88]。由于利用了循环矩阵的特征分解, 这种期望波束拟合方法可称为特征分解法。该节简要介绍该方法基本原理, 并给出必要计算公式。
基于特征分解的波束图综合方法以最小化均方误差为目的, 仅考虑水平范围内的波束形成。波束图可表示为如下形式




其中,为所研究圆环阵的半径。
当期望波束由一般形式表达时, 其具体形式为
当阵元数为奇数时, 权值向量的元素为

利用湖上试验数据, 针对一个直径3 m的24元圆环形水听器阵列获得了一个倍频程内的实际宽带频率不变响应波束[86], 另外, 还利用一个直径5 m的6元圆环形水听器阵列验证了该方法能够获得高于常规方法的宽带增益[89], 如图4所示。

图4 圆环形水听器阵列基于特征分解波束图综合方法的湖上试验结果

图5 不同方法得到的实际波束图(M=16)
2.5 不同方法比较分析
综上可知, 相位模态域方法充分利用圆环阵的圆周对称性, 将入射声场进行正交分解, 得到正交的圆环谐波分量, 然后乘以相应的系数, 获得所需要的指向性; 差分处理方法同样利用圆环阵的圆周对称性, 并使用Jacobi-Anger级数展开, 获得超指向性波束; 特征波束分解与综合方法则直接利用圆环阵空域相关矩阵是循环矩阵的性质, 推导出超指向性的解析最优解; 基于特征分解的波束图综合方法, 同样利用循环矩阵的性质, 获得合成波束权值向量的解析闭式解。这几类方法均专门针对圆环阵而提出, 不适用于其他阵型。
总体而言, 相位模态域方法形式简单, 操作较为灵活, 但就指向性而言, 由于需要进行空域采样, 具有难以消除的模型误差, 因此仍然不够精确。特征波束分解与综合方法则不涉及任何理论误差, 给出了超指向性的精确闭式解, 从最大化阵增益的角度看, 相位模态域方法只是该方法在低频范围内的近似。以上2种方法都只适用于规则障板表面圆环阵。另外, 差分处理和特征分解方法都是通过合成符合要求的特定期望波束来获得超指向性结果, 属于波束图综合类方法。然而研究结果表明, 基于特征分解的波束图综合方法通过直接拟合特定期望波束, 可以获得比差分处理方法更准确的结果。另外, 结合优化理论, 相位模态域方法、特征波束分解与综合方法以及波束图综合方法均可以通过控制旁瓣高度抑制环境噪声和空间干扰, 有利于提高信干噪比。值得指出的是, 在相位模态域, 同样可通过波束图综合方式获取模态波束形成向量, 因此相位模态域方法既属于最大阵增益类方法, 也可归为波束图综合类方法, 应视具体情况而定。以上方法的有效性和实用性均得到了仿真和试验结果的证明, 具有重要的应用价值。但由于适用范围各不相同, 需根据实际情况进行选择。一般而言, 相位模态域方法适用于声透明、刚性球体、无限长和有限长刚性柱体表面圆环阵; 文中介绍的差分处理方法适用于声透明圆环阵, 对于有障板的情况, 需进一步研究; 特征波束分解与综合超指向性方法适用于声透明、刚性球体、无限长刚性柱体表面圆环阵, 能否应用于有限长刚性柱体及弹性障板表面圆环阵也有待进一步研究; 基于特征分解的波束图综合方法适用于声透明、刚性球体、无限长刚性和弹性柱体表面圆环阵。
3 结束语
文中首先从一般化的角度对传感器阵列超指向性的研究历史、面临的问题及解决途径进行了介绍, 然后详细阐述了圆环形这一特殊结构声学传感器阵列的超指向性问题, 并将所提出的方法分为相位模态域、差分处理、特征波束分解与综合、基于特征分解的波束图综合等四大类分别进行了介绍, 给出了各种方法的基本原理, 明确了各自的优缺点, 为人们理解和使用圆环形声学传感器阵列的超指向性理论和方法提供了重要参考。
[1] Stojanovic M. High-speed Underwater Acoustic Communications[M]. U.S.: Springer, 2002: 1-35.
[2] Engineering Icons. The Barra Sonobuoy System[EB/OL]. [2017-09-01]. http://engineeringicons.org.au/engineering-ic- ons/australian/barra-sonobuoy-system/index.html.
[3] Thales. Flash Dipping Sonar. [2017-09-01]. https://www. thalesgroup.com/.
[4] Amazon. Amazon Echo. [2017-09-01]. https:// www. amazon.com/Amazon-Echo-Bluetooth-Speaker-with-WiFi-Alexa/dp/B00X4WHP5E.
[5] Schelkunoff S A. A Mathematical Theory of Linear Arrays[J]Bell System Technology Journal, 2014, 22(1): 80-107.
[6] Uzkov A I. An Approach to the Problem of Optimum Directive Antennae Design[J]Comptes Rendus (Doklady) de l' Academie des Sciences de l' URSS, 1946, 53(1): 35-38.
[7] Pritchard R L. Maximum Directivity Index of a Linear Point Array[J]. Journal of the Acoustical Society of America, 1954, 26(6): 1034-1039.
[8] Capon J. High-Resolution Frequency-Wavenumber Spectrum Analysis[J]Proceedings of the IEEE, 1969, 57(8): 1408- 1418.
[9] Gerzon M A. Maximum Directivity Factor ofth-order Transducers[J]Journal of the Acoustical Society of Ame- rica, 1976, 60(1): 278-280.
[10] Cox H, Zeskind R M, Kooij T. Practical Supergain[J]IEEE Transactions on Acoustics, Speech and Signal Processing, 1986, 34(3): 393-398.
[11] Cox H, Zeskind R M, Owen M M. Robust Adaptive Beamforming[J]IEEE Transactions on Acoustics, Speech and Signal Processing, 1987, 35(10): 1365-1376.
[12] Parsons A T. Maximum Directivity Proof for Three-di- mensional Arrays[J]Journal of the Acoustical Society of America, 1987, 82(1): 179-182.
[13] Carlson B. D. Covariance Matrix Estimation Errors and Diagonal Loading in Adaptive Arrays[J]IEEE Transactions on Aerospace & Electronic Systems, 1988, 24(4): 397-401.
[14] Cox H, Pitre R. Robust DMR and Multi-rate Adaptive Beamforming[C]//U.S.: Conference Record of the Thirty- First Asilomar Conference on Signals, Systems & Computers, 1997: 920-924.
[15] Yan S F, Ma Y L. Robust Supergain Beamforming for Circular Array via Second-order Cone Programming[J]Applied Acoustics, 2005, 66(9): 1018-1032.
[16] 鄢社锋, 马远良, 孙超. 任意几何形状和阵元指向性的传感器阵列优化波束形成方法[J]声学学报, 2005, 30 (3): 264-270.Yan She-feng, Ma Yuan-liang, Sun Chao. Beampattern Opti- mization for Sensor Arrays of Arbitrary Geometry and Element Directivity[J]. Acta Acustica, 2005, 30(3): 264-270.
[17] 鄢社锋, 马远良. 传感器阵列波束优化设计及应用[M]. 北京: 科学出版社, 2009.
[18] Doclo S, Moonen M. Design of Broadband Beamformers Robust Against Gain and Phase Errors in the Microphone Array Characteristics[J]IEEE Transactions on Signal Processing, 2003, 51(10): 2511-2526.
[19] Crocco M, Trucco A. The Synthesis of Robust Broadband Beamformers for Equally-spaced Linear Arrays[J]Journal of the Acoustical Society of America, 2010, 128(2): 691-701.
[20] Doclo S, Moonen M. Superdirective Beamforming Robust Against Microphone Mismatch[J]IEEE Transactions on Audio Speech & Language Processing, 2007, 15(2): 617-631.
[21] Crocco M, Trucco A. Design of Robust Superdirective Arrays with a Tunable tradeoff between Directivity and Frequency- invariance[J]IEEE Transactions on Signal Processing, 2011, 59(5): 2169-2181.
[22] Chen H, Ser W. Design of Robust Broadband Beamformers with Passband Shaping Characteristics Using Tikhonov Regularization[J]IEEE Transactions on Audio Speech & Lan- guage Processing, 2009, 17(4): 665-681.
[23] Trucco A, Crocco M. Design of an Optimum Super-di- rective Beamformer through Generalized Directivity Maximization[J]IEEE Transactions on Signal Processing, 2014, 62(23): 6118-6129.
[24] Pan C, Chen J, Benesty J. A Multistage Minimum Variance Distortionless Response Beamformer for Noise Reduction[J]Journal of the Acoustical Society of America, 2015, 137(3): 1377-1388.
[25] Berkun R, Cohen I, Benesty J. Combined Beamformers for Robust Broadband Regularized Superdirective Beamforming[J]IEEE/ACM Transactions on Audio Speech & Language Processing, 2015, 23(5): 877-886.
[26] Huang G, Benesty J, Chen J. Superdirective Beamforming based on the Krylov Matrix[J]IEEE/ACM Transactions on Audio Speech & Language Processing, 2016, 24(12): 2531- 2543.
[27] Wang Y, Yang Y X, He Z Y, et al. A General Superdirectivity Model for Arbitrary Sensor Arrays[J]Eurasip Journal on Advances in Signal Processing, 2015, 2015(68): 1-16.
[28] D'Spain G, Hodgkiss W, Edmonds G, et al. Initial Analysis of the Data from the Vertical Difar Array[C]//Newport, RI, USA: OCEANS '92 'Mastering the Oceans Through Technology' Proceedings, 1992: 346-351.
[29] Cray B A, Nuttall A. H. A Comparison of Vector-sensing and Scalar-sensing Linear Arrays[R]. Rhode Island: Naval Undersea Warfare Center Division, 1997.
[30] Nehorai A, Paldi E. Acoustic Vector-sensor Array Processing[J]IEEE Transactions on Signal Processing, 1994, 42(9): 2481-2491.
[31] 贾志富. 同振球型声压梯度水听器的研究[J]应用声学, 1997, 16(3): 20-25.Jia Zhi-fu. On Pressure Gradient Hydrophone with Co- oscillating Sphere[J]. Applied Acoustics, 1997, 16(3): 20-25.
[32] 孙贵青, 李启虎. 声矢量传感器信号处理[J]声学学报, 2004, 29(6): 491-498.Sun Gui-qing, Li Qi-hu. Acoustic Vector Sensor Signal Processing[J]. Acta Acustica, 2004, 29(6): 491-498
[33] Schmidlin D J. Directionality of Generalized Acoustic Sensors of Arbitrary Order[J]Journal of the Acoustical Society of America, 2007, 121(6): 3569-3578.
[34] Zou N, Nehorai A. Circular Acoustic Vector-sensor Array for Mode Beamforming[J]IEEE Transactions on Signal Processing, 2009, 57(8): 3041-3052.
[35] Guo X J, Yang S E, Miron S. Low-frequency Beamforming for a Miniaturized Aperture Three-by-three Uniform Rectangular Array of Acoustic Vector Sensors[J]Journal of the Acoustical Society of America, 2015, 138(6): 3873-3883.
[36] Wang Y, Yang Y, He Z, et al. Array Gain for a Conformal Acoustic Vector Sensor Array: An Experimental Study[J]. Chinese Physics B, 2016, 25(12): 126-131.
[37] Hans-Elias B D. The Microflown: An Acoustic Particle Velocity Sensor[J]Aiaa Journal, 2003, 31(3): 91-94.
[38] Gur B. Particle Velocity Gradient Based Acoustic Mode Beamforming for Short Linear Vector Sensor Arrays[J]Journal of the Acoustical Society of America, 2014, 135 (6): 3463-3473.
[39] Yu S D, Fernández Comesaña D, Carrillo Pousa G, et al. Unidirectional Acoustic Probe Based on the Particle Velocity Gradient[J]Journal of the Acoustical Society of America, 2016, 139(6): EL179-EL183.
[40] Pan C, Chen J, Benesty J. Performance Study of the MVDR Beamformer as a Function of the Source Incidence Angle[J]IEEE/ACM Transactions on Audio Speech & Language Processing, 2014, 22(1): 67-79.
[41] Newman E, Richmond J, Walter C. Superdirective Receiving Arrays[J]IEEE Transactions on Antennas & Propagation, 1978, 26(5): 629-635.
[42] Zhou Q C, Gao H, Zhang H, et al. Robust Superdirective Beamforming for Hf Circular Receive Antenna Arrays[J]Progress In Electromagnetics Research, 2013, 136: 665- 679.
[43] 鄢社锋, 马远良. 基于二阶锥规划的任意传感器阵列时域恒定束宽波束形成[J]声学学报, 2005, 30(4): 309- 316.Yan She-feng, Ma Yuan-liang. Broadband Constant Beam- width Beamforming for Arbitrary Sensor Arrays in Time Domain via Second-order Cone Programming[J]. Acta Acu- stica, 2005, 30(4): 309-316.
[44] Dolph C L, Riblet H J. Discussion on “A Current Distribution for Broadside Arrays Which Optimizes the Relationship between Beam Width and Side-lobe Level”[J]Proceedings of the Ire 1947, 35(5): 489-492.
[45] 马远良. 任意结构形状传感器阵方向图的最佳化[J]中国造船, 1984, 87(4): 78-85.Ma Yuan-liang. Pattern Optimisation for Sensor Arrays of Arbitrary Configuration[J]. Shipbuilding of China, 1984, 87 (4): 78-85.
[46] Olen C A, Compton R T, Jr. A Numerical Pattern Synthesis Algorithm for Arrays[J]IEEE Transactions on Antennas & Propagation, 1990, 38(10): 1666-1676.
[47] Yan S F, Hovem J M. Array Pattern Synthesis with Robustness against Manifold Vectors Uncertainty[J]IEEE Journal of Oceanic Engineering, 2008, 33(4): 405-413.
[48] Yan S F, Ma Y L, Hou C H. Optimal Array Pattern Synthesis for Broadband Arrays[J]Journal of the Acoustical Society of America, 2007, 122(5): 2686-2696.
[49] Davies D E. Circular arrays[M]. London: Handbook of Antenna Design. 1983.
[50] Meyer J. Beamforming for a Circular Microphone Array Mounted on Spherically Shaped Objects[J]Journal of the Acoustical Society of America, 2001, 109(1): 185-193.
[51] Teutsch H. Modal Array Signal Processing: Principles and Applications of Acoustic Wavefield Decomposition[J]. Lecture Notes in Control and Information Sciences, 2007, 348(1): 60-76.
[52] 蒋伟. 小尺度传感器阵列超指向性研究及实现[D]. 西安: 西北工业大学, 2007.
[53] 钱琛, 杨益新, 郭国强. 球体表面圆环阵模态域稳健高增益波束形成方法研究[J]声学学报, 2010, 35(6): 623- 633.Qian Chen, Yang Yi-xin, Guo Guo-qiang. On Robust Supergain Beamforming in Mode Space for a Circular Array Mou- nted on a Sphere[J]. Acta Acustica, 2010, 35(6): 623- 633.
[54] 汪勇, 杨益新. 柱体表面圆环阵稳健高增益波束形成的模态域直接优化方法研究[J]声学学报, 2012, 37(3): 308-318.Wang Yong, Yang Yi-xin. On Direct Optimization in Mode Space for Robust Supergain Beamforming of Cir- cular Array Mounted on a Cylinder[J]. Acta Acustica, 2012, 37(3): 308- 318.
[55] Rafaely B. Analysis and Design of Spherical Microphone Arrays[J]IEEE Transactions on Speech & Audio Pro- cessing, 2005, 13(1): 135-143.
[56] Parthy A, Jin C, Schaik A V. Measured and Theoretical Performance Comparison of a Broadband Circular Micro- phone Array[J]. International Conference on Audio, 2008, 123(5): 1289-1294.
[57] 钱琛. 小尺度声场传感器超指向性研究[D]. 西安: 西北工业大学, 2010.
[58] Parthy A, Epain N, Schaik A V, et al. Comparison of the Measured and Theoretical Performance of a Broadband Circular Microphone Array[J]Journal of the Acoustical Society of America, 2011, 130(6): 3827-3837.
[59] Tiana-Roig E, Jacobsen F, Grande E F. Beamforming with a Circular Microphone Array for Localization of Environmental Noise Sources[J]Journal of the Acoustical Society of America, 2010, 128(6): 3535-3542.
[60] Tiana-Roig E, Jacobsen F, Grande E F. Beamforming with a Circular Array of Microphones Mounted on a Rigid Sphere(l)[J]Journal of the Acoustical Society of America, 2011, 130(3): 1095-1098.
[61] Torres A M, Cobos M, Pueo B, et al. Robust Acoustic Source Localization Based on Modal Beamforming and Time-frequency Processing Using Circular Microphone Arrays[J]Journal of the Acoustical Society of America, 2012, 132(3): 1511-1520.
[62] Yang D, Zhu Z. Direction-of-arrival Estimation for a Uniform Circular Acoustic Vector-sensor Array Mounted Around a Cylindrical Baffle[J]Science China Physics Mechanics & Astronomy, 2012, 55(12): 2338-2346.
[63] 杨德森, 朱中锐, 时胜国, 等. 声矢量圆阵相位模态域目标方位估计[J]声学学报, 2014, 39(1): 19-26.Yang De-sen, Zhu Zhong-rui, Shi Sheng-guo, et al. Direction-of-arrival Estimation Based on Phase Modal Space for a Uniform Circular Acoustic Vector-sensor Array[J]. Acta Acustica, 2014, 39(1): 19-26.
[64] Meyer J, Elko G W. Spherical Microphone Arrays for 3d Sound Recording[M]. Berlin: Springer, 2004: 67-89.
[65] Alon D L, Rafaely B. Spatial Aliasing-cancellation for Circular Microphone Arrays[C]//France: The 4th Joint Workshop on Hands-free Speech Communication and Microphone Arrays (HSCMA), 2014: 137-141.
[66] 马远良. 小尺度水听器基阵能否获得高于常规波束形成器的阵增益[C]//陕西杨凌: 陕西省声学学会首届学术会议, 2002.
[67] McConnell J A, Jensen S C. Forming First-and Second-order Cardioids with Multimode Hydrophones [C]// Boston: OCEANS 2006, 2006: 1-6.
[68] Benesty J, Chen J. Study and Design of Differential Microphone Arrays[M]. Berlin: Springer Topics in Signal Processing, Vol. 6. Berlin: Springer-Verlag, 2013.
[69] Chen J, Benesty J, Pan C. On the Design and Implementation of Linear Differential Microphone Arrays[J]Journal of the Acoustical Society of America, 2014, 136(6): 3097-3113.
[70] Zhao L, Benesty J, Chen J. Design of Robust Differential Microphone Arrays[J]IEEE/ACM Transactions on Audio Speech & Language Processing, 2014, 22(10): 1455-1466.
[71] Benesty J, Chen J, Cohen I. Design of Circular Differential Microphone Arrays[M]. Springer Topics in Signal Processing. Vol. 12. Berlin: Springer-Verlag, 2015.
[72] Huang G, Benesty J, Chen J. On the Design of Frequency-invariant Beampatterns with Uniform Circular Microphone Arrays[J]IEEE/ACM Transactions on Audio Speech & Language Processing, 2017, 25(5): 1140-1153.
[73] Huang G, Benesty J, Chen J. Design of Robust Concentric Circular Differential Microphone Arrays[J]Journal of the Acoustical Society of America, 2017, 141(5): 3236-3249.
[74] Ma Y L, Yang Y X, He Z Y, et al. Theoretical and Practical Solutions for High-order Superdirectivity of Circular Sensor Arrays[J]IEEE Transactions on Industrial Electronics, 2013, 60(1): 203-209.
[75] Wang Y, Yang Y X, Ma Y L, et al. Robust High-order Superdirectivity of Circular Sensor Arrays[J]Journal of the Acoustical Society of America, 2014, 136(4): 1712-1724.
[76] Wang Y, Yang Y X, Ma Y L, et al. High-order Superdirectivity of Circular Sensor Arrays Mounted on Baffles[J]Acta Acustica United with Acustica, 2016, 102(1): 80-93.
[77] Butler J L, Ehrlich S L. Superdirective Spherical Radiator[J]Journal of the Acoustical Society of America, 1977, 61(6): 1427-1431.
[78] Wang Y, Yang Y, Ma Y, et al. Superdirective Beamforming for Dual Concentric Circular Hydrophone Arrays[C]// Aberdeen: OCEANS 2017, 2017: 1-5.
[79] Wang Y, Yang Y, Ma Y, et al. Analytical Solutions of Superdirectivity for Circular Arrays with Acoustic Vector Sensors[C]//Skiathos, Greece: UACE2017 4th Underwater Acoustics Conference and Exhibition. 2017: 107-112.
[80] Sydow C. Broadband Beamforming for a Microphone Array[J]Journal of the Acoustical Society of America, 1994, 96(2): 845-849.
[81] Yang Y X, Sun C, Wan C. Theoretical and Experimental Studies on Broadband Constant Beamwidth Beamforming for Circular Arrays[C]//San Diego, CA: OCEANS 2003, 2003: 1647-1653.
[82] Parra L C. Steerable Frequency-invariant Beamforming for Arbitrary Arrays[J]Journal of the Acoustical Society of America, 2006, 119(6): 3839-3847.
[83] Tseng C Y, Griffiths L J. A Simple Algorithm to Achieve Desired Patterns for Arbitrary Arrays[J]. IEEE Transactions on Signal Processing, 1992, 40(11): 2737-2746.
[84] Ng B P, Er M H, Kot C. A Flexible Array Synthesis Method Using Quadratic Programming[J]IEEE Transactions on Antennas & Propagation, 1993, 41(11): 1541-1550.
[85] Wang F, Balakrishnan V, Zhou P Y, et al. Optimal Array Pattern Synthesis Using Semidefinite Programming[J]IEEE Transactions on Signal Processing, 2003, 51(5): 1172-1183.
[86] Wang Y, Yang Y X, Ma Y L, et al. Broadband Pattern Synthesis for Circular Sensor Arrays[J]Journal of the Acoustical Society of America, 2014, 136(2): EL153- EL158.
[87] Wang Y, Yang Y X, He Z Y, et al. Theoretical Solutions of Pattern Synthesis for a Circular Array Mounted on Cylinders[C]// Taipei, Taiwan: OCEANS 2014, 2014: 1-6.
[88] Wang Y, Yang Y, He Z, et al. Robust Superdirective Frequency-invariant Beamforming for Circular Sensor Arrays[J]IEEE Signal Processing Letters, 2017, 24(8): 1193-1197.
[89] Wang Y, Yang Y X, Zhu S H, et al. Experimental Study of Superdirective Frequency-invariant Beamforming for a Circular Hydrophone Array[C]//Monterey: OCEANS 2016 MTS/IEEE, 2016: 1-5.
(责任编辑: 陈 曦)
Discussion about the Superdirective Beamforming Theory and Methods of Circular Acoustic Sensor Arrays
WANG Yong, YANG Yi-xin, MA Yuan-liang
(School of Marine Science and Technology, Northwestern Polytechnical University, Xi′an 710072, China)
To solve the contradiction between size and spatial directivity of sensor array due to space limitation of the carrier, such as unmanned undersea system, the supedirective beamforming methods were proposed to provide high directivity for a size-limited sensor array. This paper introduces the research background and history of superdirectivity, and presents the confronted problems and corresponding countermeasures. These superdirective beamforming methods can be classified into two main types, i.e., gain-maximation and beam pattern synthesis. Then, the common supedirective beamforming methods specially for circular acoustic sensor arrays are discussed in detail, and based on the above two main types, they are further categorized into the phase-mode method, the difference-based method, the eigen-beam decomposition and synthesis method, and the eigen-decomposition-based beam pattern synthesis method. The corresponding basic principles, merits anddemerits, application ranges, relationship between each other and some related experimental results of these superdirective beamforming methods are analyzed to give a comprehensive presentation of the superdirective beamforming methods for circular acoustic sensor arrays, and to provide guidelines for related research and application.
unmanned undersea system; superdirectivity; acoustic sensor; circular array
汪勇,杨益新,马远良.圆环形声学传感器阵列超指向性理论及方法[J].水下无人系统学报,2017,25(4):297-309.
在水中兵器、UUV等小型水下无人系统中, 如何在有限的阵列尺度下获得足够高的空间指向性是阵列信号处理中亟待解决的问题。水听器阵列受平台空间限制, 必然会影响其在探测、识别、跟踪和通信等方面的性能提升, 尤其是对弱信号的检测和目标分辨。超指向性作为一种先进的波束形成方法, 可以在不增加阵列尺寸和阵元数的前提下, 降低适用的频率范围, 获得超过常规方法所能得到的指向性和信噪比增益, 或者在同样的指向性条件下大大减小阵列孔径和减少阵元数。因此, 研究稳健的超指向性波束形成方法具有重要的现实意义。近几十年来, 超指向性理论和方法得到了人们的大量关注, 新理论新方法层出不穷,但也让从事相关工作的研究者眼花缭乱。在国内,杨益新教授带领的海洋观测与探测技术研究团队在水声阵列设计和优化理论、高阶超指向性传感器理论、前向散射探测理论、水声分布式探测系统跨界面传输技术、深远海海洋信息观测等方向有深入研究,取得了一批原创性成果。目前团队承担着国家安全重大基础研究项目、国家重大专项、国防重点预研课题、国家自然科学基金仪器专项、国家自然科学基金重点项目等多项国家级项目的研究与研制任务。本刊特邀其团队骨干汪勇博士系统梳理了广泛应用的圆环形声学传感器阵列超指向性理论和方法,以综述形式呈现,旨在让读者对圆环形声学传感器阵列超指向性问题有一个较全面完整的认识,为人们研究和应用超指向性相关方法提供参考。
TJ630; TB566; U674.941
A
2096-3920(2017)04-0297-13
10.11993/j.issn.2096-3920.2017.04.001
2017-09-20;
2017-10-16.
国家自然科学基金(11604259, 11527809)和中国博士后科学基金(2016M592782)资助.
汪 勇(1987-), 男, 博士, 主要研究方向为水声信号处理.
