BTT导弹的三通道驾驶仪频带匹配关系研究
2017-11-21温求遒夏群利
李 威 温求遒 夏群利
北京理工大学, 北京 100081
BTT导弹的三通道驾驶仪频带匹配关系研究
李 威 温求遒 夏群利
北京理工大学, 北京 100081
针对BTT导弹滚转角速度较大,俯仰和偏航通道具有强耦合、非线性的飞行控制特点,基于合理假设,通过线性化策略解耦得到相互独立的三通道弹体动力学模型,采用三通道独立设计的思想完成导弹三通道驾驶仪的设计。在此基础上,得到了三通道驾驶仪的闭环阶跃响应、开环系统幅相裕度以及导弹飞行参量的变化曲线,讨论了三通道控制系统响应快速性及频带匹配关系。根据仿真结果,得到了BTT导弹在满足滚转通道稳定性的前提下,尽量提高其频带,保持俯仰和偏航通道响应速度的一致性有利于消除通道间的耦合,增强BTT导弹的协调转弯能力。
BTT导弹;三通道驾驶仪;频带匹配;协调转弯
采用倾斜转弯(Bank-To-Turn,BTT)控制的导弹用极坐标的方式生成控制指令,要求其滚转通道快速响应滚转指令,以保证将其最大升力面转到理想的方向进行机动飞行[1]。侧向通道实现侧滑角归零,以起到协调转弯的作用。
BTT导弹由于滚转角速度和侧向通道控制偏差的存在,使得其三通道的控制数学模型存在强烈的运动学耦合和气动交叉耦合项。此外,由于BTT弹体具有很强的静不稳定性,其对三通道控制系统的鲁棒性要求更高。
协调匹配的三通道驾驶仪频带是在保证控制系统稳定裕度的条件下,提高侧向通道的协调转弯能力,尽可能消除通道间耦合。目前,侧向通道主要通过3种方式实现其协调转弯的控制: 1)侧滑角反馈直接消除侧滑角;2)由外回路采用侧向加速度反馈实现侧滑归零;3)在一定的滚转角和飞行速度下,基于偏航角速度不变原理实现协调转弯。基于上述理论,开展BTT导弹的三通道控制系统频带关系研究,旨在提高驾驶仪的抗干扰能力,增强控制系统的稳定性,保证导弹精确命中目标,满足导弹飞行过程及终端的各项约束指标。
1 BTT弹体控制建模
基于BTT弹体的飞行控制特点,其三通道控制数学模型存在的主要耦合项是运动学耦合和气动耦合,因此主要针对这2类耦合项的影响进行分析,并基于合理假设,建立考虑耦合的BTT弹体三通道线性化动力学模型[2-3]。
相关假设如下:
1)考虑导弹飞行过程中的重力影响,并假设其在理想弹道附近运动,即小扰动运动;
2)导弹速度变化缓慢,即认为导弹速度矢量维持常值并沿水平方向;
3)导弹满足面对称条件,即惯性积Jxz=Jyz=0数值较小,可忽略;
4)假设导弹飞行过程中的攻角和侧滑角较小,认为sinα≈α,cosα≈1,sinβ≈β,cosβ≈1。
1.1 BTT弹体耦合特性分析
基于以上相关假设,建立弹体的三通道控制系统数学模型如下
(1)
从式(1)可以看出,BTT弹体由于气动外形不对称以及运动学的因素,使其数学模型除了含有正常的三通道控制力和控制力矩外,含有各种耦合力及力矩项,对其进行分类如下:
1)运动学耦合,弹体系下导弹一个方向的运动会在另一个方向产生耦合的力,其中偏航通道的耦合较为严重;
2)气动耦合,导弹流场不对称、非线性等因素引起的,其中最主要的耦合项为侧滑角带来的滚转通道斜吹力矩;
3)控制交叉耦合,导弹一通道的气动操纵控制会在另一通道产生耦合的力与力矩,通常主要项为方向舵(副翼)偏转在滚转(偏航)通道产生的耦合力矩。
1.2 协调转弯驾驶仪结构分析
BTT导弹机动过程中,弹体最大升力面的指令信号在惯性系经过分解可得到导弹侧向的期望过载指令,从而产生侧滑角[4-5]。基于上述侧滑角的产生机理,并结合工程实际要求,可知对于偏航通道而言,其驾驶仪期望的输入指令始终为0,其侧向转弯产生的偏航加速度和角速度相当于干扰信号。因此对于偏航通道驾驶仪,其内回路设计主要考虑增加弹体阻尼,多采用偏航角速度反馈,而外回路则采用弹体系下的侧向加速度反馈尽量实现侧滑归零,且利于工程实现。
结合上述分析,给出BTT导弹协调转弯控制的三通道驾驶仪原理框图如图1~3。
图1 俯仰通道驾驶仪

图2 偏航通道驾驶仪
图3 滚转通道驾驶仪
从图1可知,其俯仰通道驾驶仪由3个反馈回路组成,即阻尼回路、姿态角回路和加速度回路。姿态角速度及姿态角回路近似姿态驾驶仪,可增加弹体频率及阻尼,而前向通道含有积分环节,减小驾驶仪跟踪静差[6]。图2为偏航通道驾驶仪结构框图,可在其前向通道加入合适的PI校正环节以提高控制系统的稳定裕度,增强导弹协调转弯能力。图3为滚转通道驾驶仪,采用姿态驾驶仪,外回路滚转角反馈快速响应滚转指令,内回路滚转角速度反馈提高系统阻尼。
2 俯仰-滚转通道频带匹配关系研究
根据建立的BTT弹体控制系统数学模型,以及对三通道驾驶仪结构特性的分析,并根据假设,将弹体三通道解耦成完全独立的控制模型,完成自动驾驶仪的设计。针对各通道不同的设计频带,引入通道耦合对驾驶仪系统性能进行详细分析,最后通过对比得出合理的三通道驾驶仪频带匹配关系。
2.1 驾驶仪参数设计
忽略舵机动力学,俯仰三回路过载驾驶仪为三阶系统,选取设计指标参数τpitch,ωpitch和μpitch,从而可根据极点配置方法确定控制系统的3个参数,即ka,kg和ωi。通常情况下,要求三回路驾驶仪特征方程的一阶主根决定系统的快速性,而二阶振荡根则主要对系统动态特性进行调节。
忽略舵机动力学,偏航两回路过载驾驶仪和滚转通道姿态驾驶仪均为二阶系统,偏航及滚转通道同样可以根据期望的系统性能,利用极点配置方法完成系统设计,确定驾驶仪参数ka,kg和kar,kgr。
下面给出1组典型的弹体气动参数,数据见表1~3。

表1 俯仰通道弹体气动数据

表2 偏航通道弹体气动数据

表3 滚转通道弹体气动数据
2.2 驾驶仪快速性指标分析
分析时首先忽略舵机动力学影响,控制系统可以设计得足够快,选取俯仰通道三回路过载驾驶仪的设计指标为τpitch=0.25,ωpitch=5rad/s和μpitch=0.75。为分析滚转通道对俯仰通道的影响,先假定偏航通道和俯仰通道快速性基本相同,则选定偏航通道的设计指标为ωyaw=5rad/s和μyaw=0.75。基于上述分析,可得俯仰和偏航通道的单位阶跃响应,见图4。从图4可知,俯仰通道阶跃响应时间为ts=0.332s。
图4 俯仰和偏航通道单位阶跃响应
取不同的滚转驾驶仪响应速度,分别设计滚转通道驾驶仪响应速度是俯仰通道的0.5倍、1倍、2倍和4倍,并给出其对应的设计参数,见表4。
表4 滚转驾驶仪设计参数
下面给出不同频带下的滚转通道单位阶跃响应曲线,见图5。

图5 滚转通道单位阶跃响应
假设导弹当前飞行状态下,期望的俯仰通道加速度指令aybc=5m/s2,滚转通道姿态指令γc=5°,偏航通道协调转弯加速度指令azbc=0m/s2,得到滚转驾驶仪不同快速性时的三通道仿真曲线,见图6~10。
图6 俯仰加速度曲线
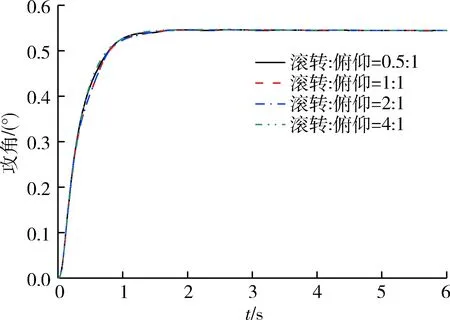
图7 攻角变化曲线

图8 侧滑角变化曲线

图9 滚转角变化曲线
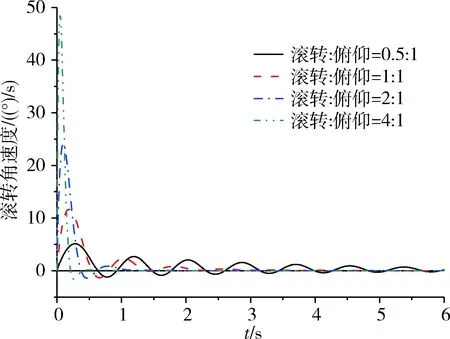
图10 滚转角速度变化曲线
由图6~ 10可以得出结论:
1)滚转通道的响应速度对三通道的控制系统影响较大。当滚转通道的频带比俯仰通道慢时,三通道振荡较严重,控制系统甚至出现失稳现象,分析控制系统数学模型可知,主要原因就是运动学耦合ωxbα导致偏航通道产生耦合侧滑角β,并由气动耦合cββ产生滚转干扰力矩,滚转通道过慢则不能快速消除干扰影响,产生干扰角速度,再由运动学耦合ωxbβ对俯仰通道造成影响;
2)当滚转通道快速性达到2倍以上俯仰通道时,俯仰、滚转响应满足系统要求,偏航通道侧滑角也能快速收敛,这是由于滚转角能更快趋于稳态,滚转角速度快速归零,对俯仰及偏航通道的耦合影响明显降低,因此可知提高滚转通道频带能有效降低系统耦合影响。
然而,由于舵机等硬件动力学的限制,滚转通道驾驶仪不可能设计得无限快,否则将造成整个制导控制回路的失稳。假设舵机模型为二阶环节,其传递函数如下

(2)
确定滚转驾驶仪阻尼系数μroll=0.75,分析可得不同滚转频带下的系统开环幅相裕度,见图11~ 12。
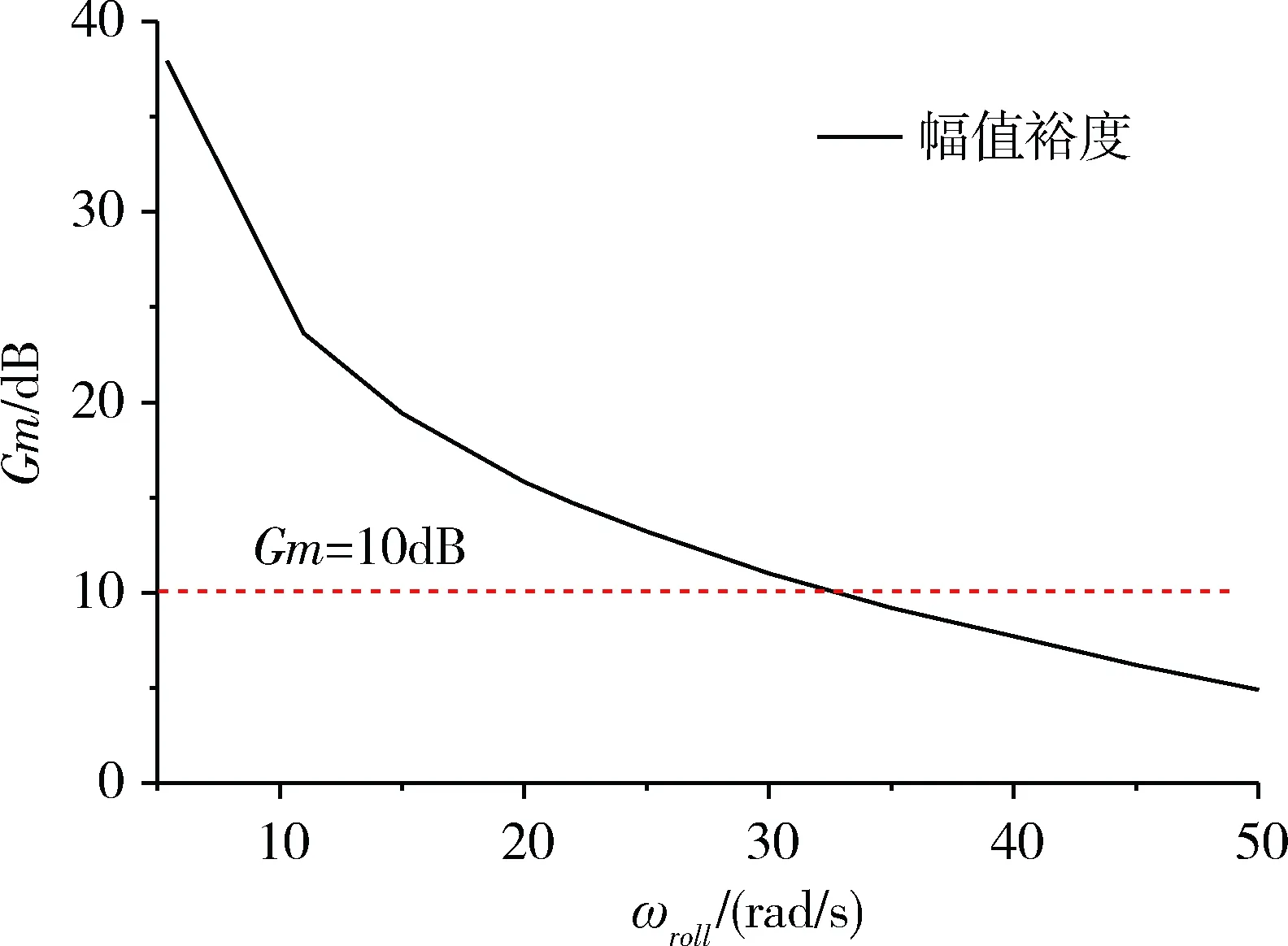
图11 开环系统幅值裕度

图12 开环系统相位裕度
由图11~ 12可知,根据控制系统的幅值裕度和相位裕度要求,可确定滚转驾驶仪的频带ωroll,再根据滚转通道和俯仰通道的频带关系可确定俯仰驾驶仪的相关设计指标参数。基于上述分析,考虑幅值裕度不低于10dB,相位裕度不小于45°,可选定滚转驾驶仪的设计参数为ωroll=20rad/s,μroll=0.75。
3 偏航通道频带研究
基于之前对俯仰-滚转通道驾驶仪频带的分析,结合对开环控制系统的幅相裕度要求,设计滚转通道的参数为ωroll=20rad/s,μroll=0.75,俯仰通道的参数为τpitch=0.25,ωpitch=5rad/s,μpitch=0.75。为了分析偏航通道的快速性对三通道控制系统性能的影响,选取偏航通道的阻尼系数μyaw=0.75,分别选取偏航通道的响应速度为俯仰驾驶仪的0.5倍、1倍、2倍和3倍,对应的偏航通道驾驶仪频带ωyaw=2.5rad/s,5rad/s,10rad/s和15rad/s,得到偏航通道的单位阶跃响应,见图13。

图13 偏航通道单位阶跃响应
根据上述分析,取俯仰指令aybc=5m/s2,滚转指令γc=5°,偏航指令azbc=0m/s2,得到偏航驾驶仪不同设计频带对应的三通道仿真曲线,见图14~17。

图14 俯仰加速度曲线

图15 侧滑角曲线
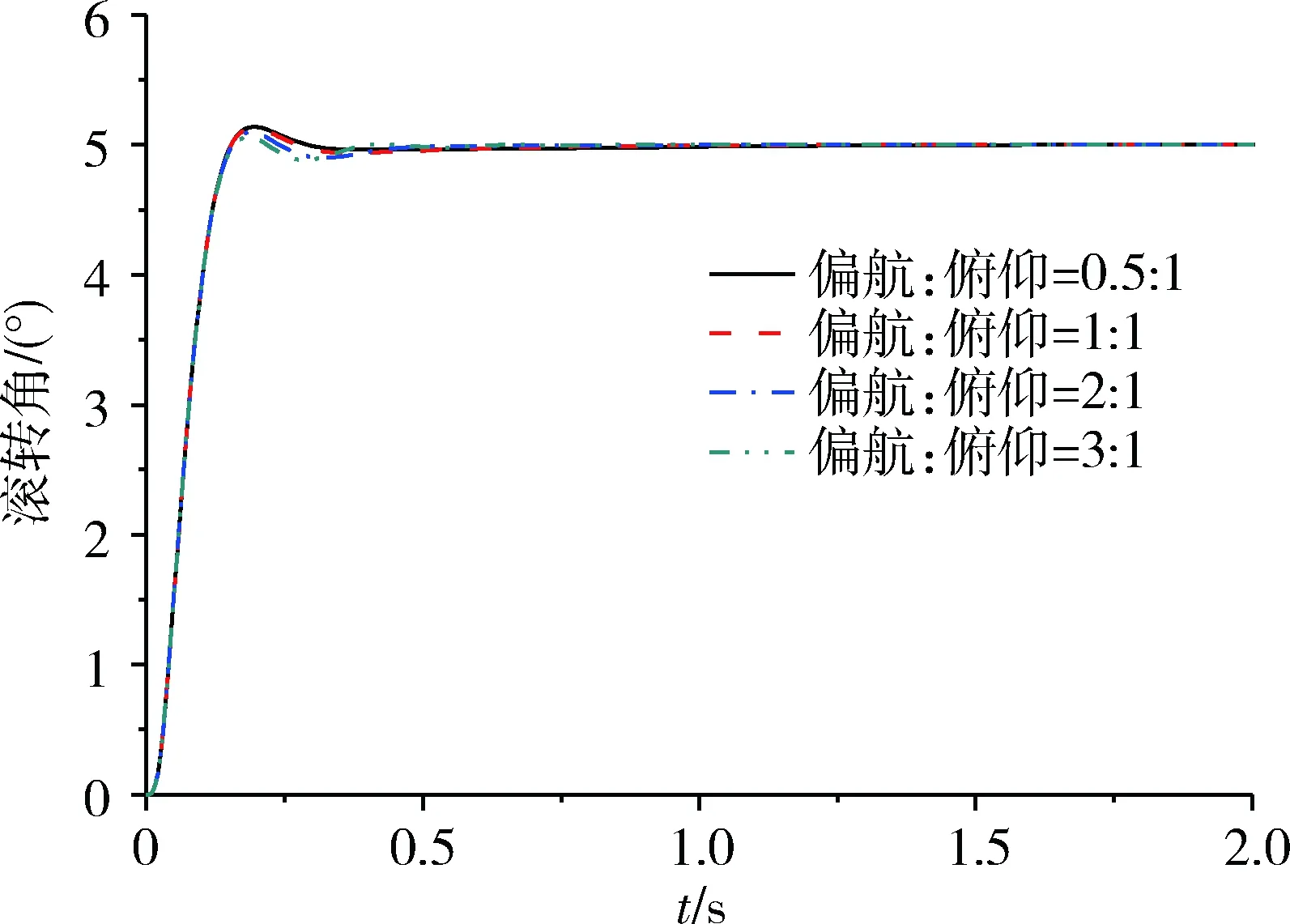
图16 滚转角曲线
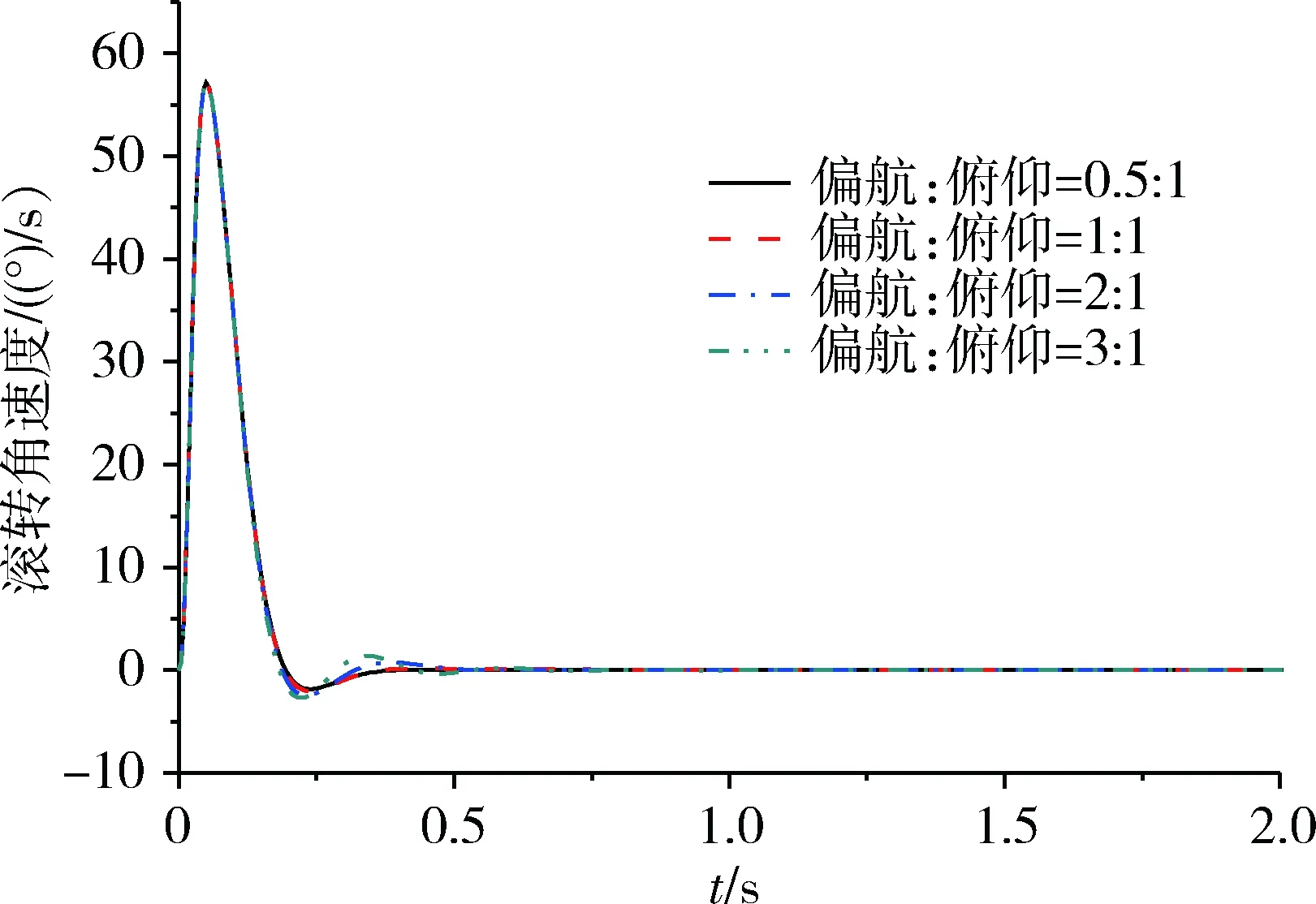
图17 滚转角速度曲线
由图14~17可知,当滚转通道响应足够快时,改变偏航快速性对滚转通道的影响较小,滚转角及角速度响应基本保持不变;随着偏航通道快速性的增加,侧滑角收敛速度提高,而过渡过程侧滑角最大值有所增加,对俯仰通道过渡过程的影响也将增大。BTT导弹偏航通道升力面较小,弹体频率较低,存在舵机等滞后环节时,偏航驾驶仪频带提高受到一定限制,很难达到比俯仰通道更快,因此可以让偏航通道的快速性与俯仰通道基本相当,实现快速协调转弯的同时减小对俯仰通道的影响。
4 结论
基于上述对三通道驾驶仪频带匹配特性的分析,可确定三通道驾驶仪的时域及频域特性,见图18~ 20。
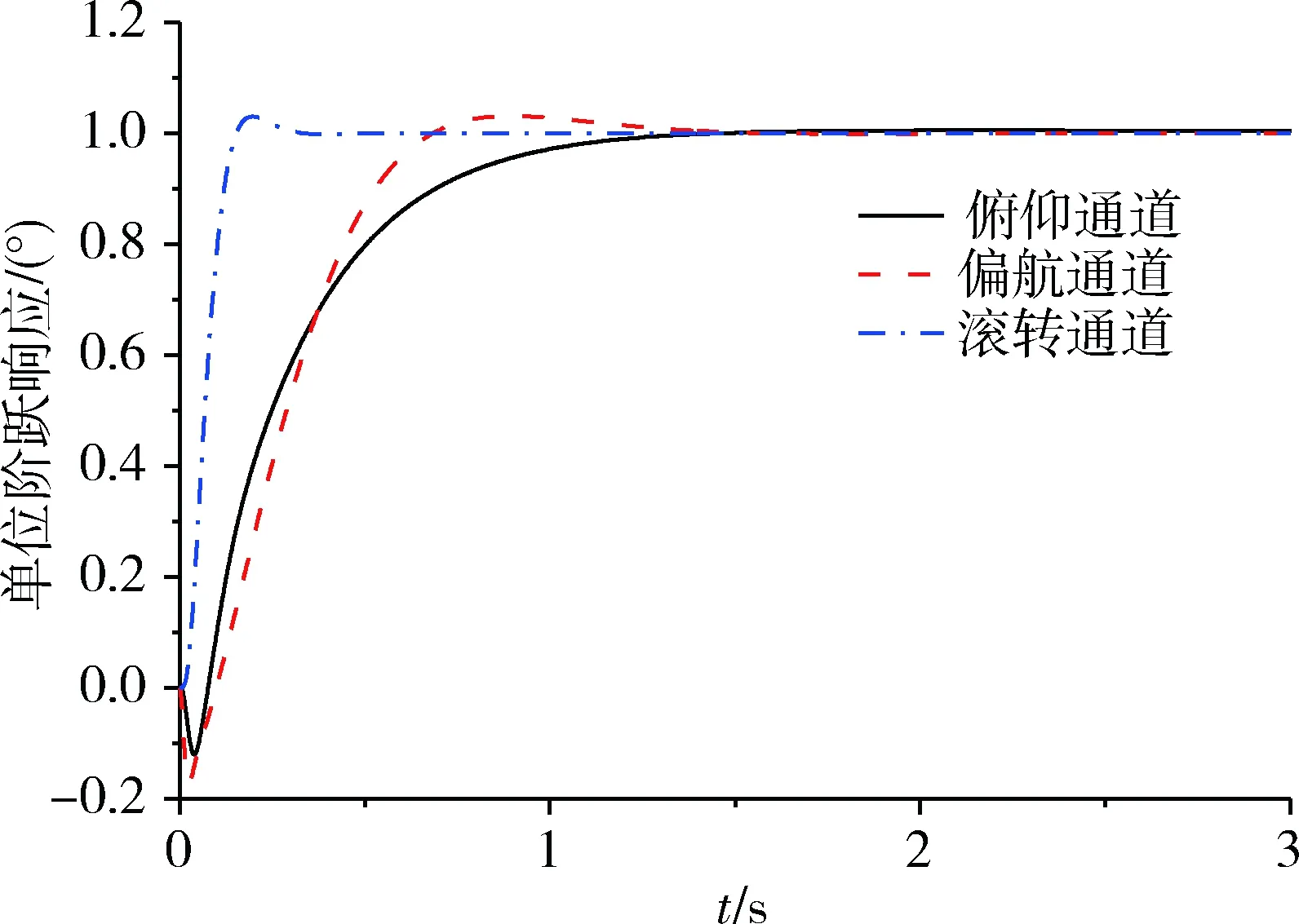
图18 三通道时域响应曲线

图19 三通道开环幅值特性
图20 三通道开环相位特性
基于BTT弹体的飞行控制特性,分析了其三通道控制系统数学模型的耦合特性及驾驶仪结构,采用三通道独立设计的思想设计了三通道驾驶仪的相关设计指标参数。确定三通道控制系统的输入指令后,研究了三通道驾驶仪的频带匹配关系,其结果表明:对于BTT导弹的三通道控制而言,在满足滚转通道的稳定性要求下,尽量提高滚转通道频带有利于消除通道耦合,应尽量保证滚转通道的频带为俯仰通道的2倍以上;偏航通道应尽量保持与俯仰通道快速性一致,以利于提高BTT导弹的协调转弯能力;俯仰通道作为响应制导指令的主通道,在满足其快速性要求的前提下,可适当放慢其响应速度有利于减小各通道间的耦合作用[7]。
上述研究基于耦合的三通道控制系统数学模型,考虑了舵机硬件动力学的限制,分析了导弹三通道协调匹配的频带关系,对增强BTT导弹控制系统的鲁棒性具有一定的工程指导意义,有利于实现导弹的稳定飞行,保证其命中精度。
[1] 张保群, 宋申民, 等. 基于自抗扰控制的BTT导弹自动驾驶仪设计 [J]. 航天控制, 2010, 28(1):46-47.(Zhang Baoqun, Song Shenmin, et al. Bank-to-Turn Missile Autopilot Design Based on Active Disturbance Rejection Control[J]. Journal of Aerospace Control, 2010, 28(1):46-47.)
[2] 王磊, 李强, 夏群利. BTT导弹建模与弹体动力学特性分析 [C]. 第32届中国控制会议,西安, 2013.
[3] 刘燕斌. 高超声速飞行器建模及其先进飞行控制机理的研究 [D]. 南京:南京航空航天大学, 2007.
[4] 江燕俊, 等. 高超音速BTT巡航飞行器变结构控制系统设计 [J]. 计算机仿真, 2009, 12(26):54-56(Jiang Yanjun. Design of Variable Structure Control System for Hypersonic BTT Vehicle [J]. Computer Simulation,2009,12(26):54-56.)
[5] 张友安, 杨旭, 崔平远, 等. 倾斜转弯飞航导弹的制导与控制问题研究 [J]. 宇航学报, 2000, 21(4):71-75.(Zhang Youan, Yang Xu, Cui Pingyuan, et al. Research of Guidance and Control for BTT Winged Missile [J]. Journal of Astronautics, 2000,21(4):71-75.)
[6] Wen Qiuqiu. Analysis and Design for Missile of Three-loop Autopilot [J]. Journal of Beijing Institute of Technology,2012,21(2):172-178.
[7] 温求遒, 孙毓凯, 夏群利. BTT控制回路匹配性对制导脱靶量影响研究[J]. 北京理工大学学报, 2014, 3(34):228-229.(Wen Qiuqiu, Sun Yukai, Xia Qunli. Research on Influence to Guidance Miss-distance by BTT Control [J]. Journal of Beijing Institute of Technology, 2014, 3(34): 228-229.)
ResearchontheFrequencyMatchingPerformanceofBTTAutopilots
Li Wei, Wen Qiuqiu, Xia Qunli
Beijing Institute of Technology, Beijing 100081, China
Basedonrationalassumptions,independentmissiledynamicmodelismutuallyestablished,whicheliminatedthecouplingthroughlinearizationstrategy,andthedesignofmissile’sthreechannelautopilotsiscompleted.Onthebasisofthat,threechannelautopilots’closed-loopstepresponse,theamplitudeandphasedomainofopen-loopsystemisobtainedandthreechannelautopilots’frequencymatchingrelationshipandtheeffectontheperformanceofcontrolsystemsarediscussed.Finally,thesimulationresultsshowthatBTTautopilotscanimprovetherollingchannelbandaslongasitsstabilitycanmeettherequirements,whichisusefulforeliminatingthecouplingeffectsamongthreechannelsandenhancingmissile’sabilityofcoordinateturnthatkeepsthefastconsistencyofpitchandyawchannelsassoonaspossibile.
BTTmissile;Autopilot;Frequencymatching;Coordinateturn

TJ765
A
1006-3242(2017)05-0030-07
2017-03-24
李威(1994-),男,云南宣威人,硕士研究生,主要研究方向为飞行器的制导与控制;温求遒(1982-),男,桂林人,博士后, 硕士生导师,主要研究方向为飞行器的制导与控制;夏群利(1977-),男,辽宁抚顺人,教授,博士生导师,主要研究方向为飞行器的制导与控制。
