基于VI-Rail的高速动车组半主动协调控制仿真分析*
2017-11-21赵义伟刘永强张新立廖英英马增强
赵义伟 刘永强 张新立 廖英英 马增强
基于VI-Rail的高速动车组半主动协调控制仿真分析*
赵义伟1刘永强1张新立1廖英英2马增强3
(1.石家庄铁道大学机械工程学院,050043,石家庄;2.石家庄铁道大学土木工程学院,050043,石家庄;3.石家庄铁道大学电气工程学院,050043,石家庄//第一作者,硕士研究生)
为了提升高速动车组的运行品质,提出了一种二系横向、抗蛇行减振器半主动协调控制方法。首先利用VI-Rail软件建立动车组单车模型,然后对提出的半主动协调控制方法进行动力学仿真,并与被动控制下的列车运行品质进行比较分析,探究此半主动协调控制方法对高速动车组运行平稳性和曲线通过安全性的影响。仿真结果表明:采用半主动协调控制的高速动车组的各项性能指标均明显优于被动控制,而且有效缓解了列车运行平稳性和曲线通过性之间的矛盾,能很好地提升动车组的运行品质。
高速动车组;半主动协调控制;横向减振器;抗蛇行减振器
悬挂系统的特性决定了动车组的动力学性能。传统被动悬挂系统的阻尼和刚度无法在工作过程中进行自我调节,因此难以适应列车高速运行的要求,也无法适应不同线路的运行条件。针对被动悬挂的缺陷,国内外学者提出了许多基于主动控制技术的主动和半主动控制方法,并对此进行了分析。文献[1-3]对车辆的半主动控制技术进行了仿真分析与试验研究,得到了良好的效果;文献[4]采用天棚和地棚混合半主动控制策略对单车模型进行了仿真分析,提高了整车动力学性能;文献[5]提出了一种基于SH-ADD的新型半主动控制策略,提高了列车横向平稳性能;文献[6]用单车模型研究了主动控制技术对车辆动力学性能的影响;文献[7-8]研究了半主动控制技术对车辆性能的影响。本文将二系横向半主动控制技术与抗蛇行半主动控制技术联合起来进行协调控制(即半主动协调控制),并对整车模型进行动力学仿真,进而分析其对列车平稳性和曲线通过性的影响。
1 动车组建模
以某型高速动车组头车的技术参数为标准,利用VI-Rail多体动力学软件[9]建立高速动车组单车空车模型,且将车体视为刚体,不考虑其弹性变形。动车组整车模型主要的技术参数如表1所示。车体模型和转向架模型如图1、2所示。
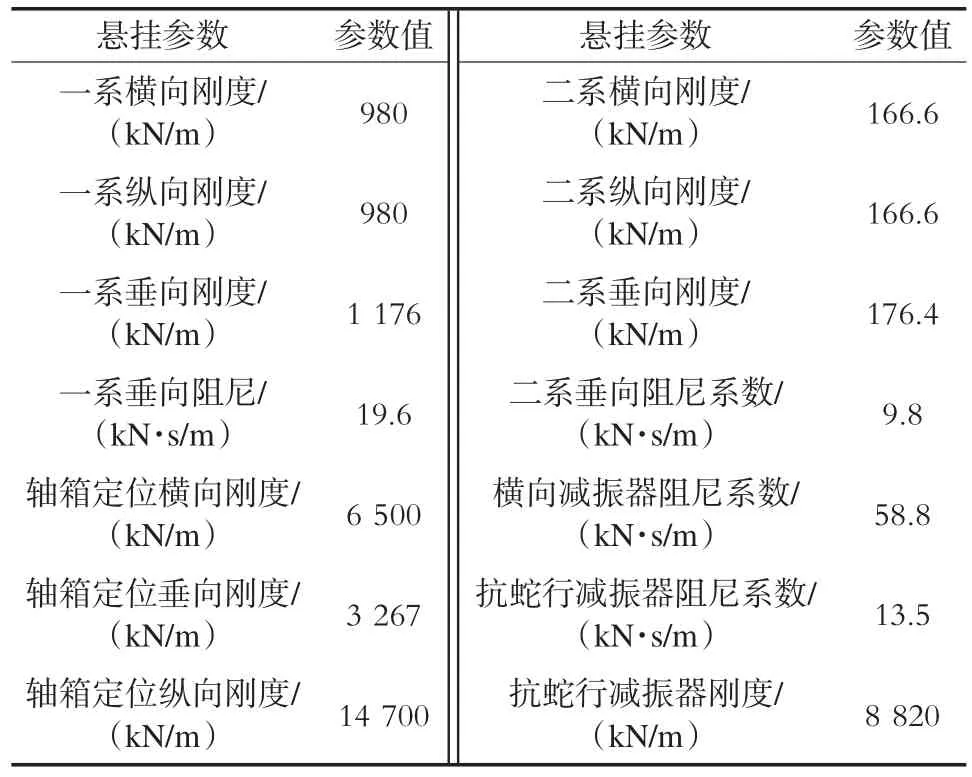
表1 模型主要技术参数
图1 动车组车体模型
图2 转向架模型
将建立好的车体和转向架模型组装成车辆系统集成模型,如图3所示。

图3 动车组单车模型
2 横向减振器半主动控制策略
要实现半主动控制,横向减振器的阻尼必须能实时变化,因此用力元来取代横向减振器的固定阻尼系数,并采用一种加速度阻尼控制策略[5]和IF函数来控制力元,从而实现横向减振器半主动控制。
加速度阻尼控制策略如下:

式中:
C1——被动悬挂阻尼系数,C1=58.8 kN·s/m;
x·1——车体横向速度;
x·2——转向架横向速度;
x··1——车体横向加速度;
x·1-x·2——车体与转向架之间的横向相对速度。
3 抗蛇行减振器控制策略
对抗蛇行减振器进行半主动控制,仍然是利用IF函数控制减振器阻尼系数。但是,列车在直线轨道与曲线轨道上所需要的最优抗蛇行阻尼系数值不同,因此判断列车是在直线轨道还是在曲线轨道上运行的切换参数便成为控制的关键所在。
由于存在曲线轨道超高因素,当列车通过曲线轨道时,车体左右两侧的垂向高度会发生变化,并且列车在曲线上的垂向变化会明显大于在直线运行时的变化,因此可以把列车左右两侧的垂向高差(ΔZ)作为直线行驶与曲线行驶的切换参数[10]。本文将建立的高速动车组分别在直线与曲线轨道上进行动力学仿真,得出在不同轨道上的垂向高差,如图4所示。
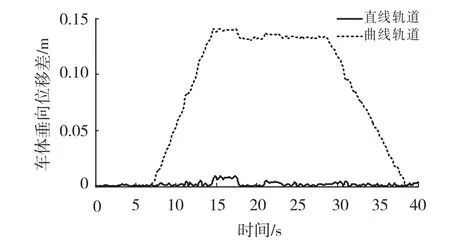
图4 直线与曲线轨道上车体两侧垂向相对位置
由图4可知,在直线轨道上,车体两侧垂向相对高差很小,仅几毫米,而在曲线轨道上,车体两侧垂向相对高差达140 mm。取车体两侧垂向相对高差瓶颈值9.5 mm作为判断直线行驶与曲线行驶的阈值。
列车在直线轨道行驶时,抗蛇行减振器阻尼系数越大,列车的横向稳定性越好,但是考虑国内的技术因素,暂取其阻尼系数的最大极限值为1×107N·s/m。列车在曲线轨道行驶时,抗蛇行减振器系数必须具有最优值,才能保证列车有良好的平稳性与安全性。为了准确确定曲线通过时的抗蛇行最优阻尼系数值,预设该最优值的取值范围为[1×105N·s/m,2×106N·s/m],步长为 1×105,利用 VI-Rail进行动力学仿真。仿真结果如图5所示。
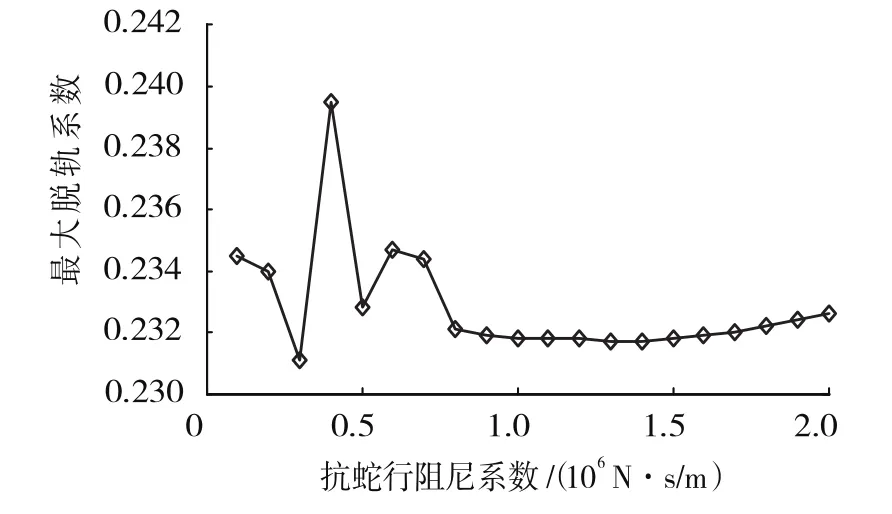
图5 通过曲线时抗蛇行阻尼系数优化
由图5可知,曲线轨道上最优的抗蛇行阻尼系数为3×105N·s/m。因此,可得出高速动车组单车模型的抗蛇行减振器半主动控制策略为:

式中:
Cz——直线轨道上的最佳阻尼系数,Cz=1×107N·s/m;
Cq——曲线轨道上的最佳阻尼系数,Cq=3×105N·s/m;
ΔZ——车体两侧垂向高差。
4 半主动协调控制仿真分析
将上述两个控制策略用VI-RAIL软件添加到建立好的整车模型上,对其进行动力学仿真并分析此协调控制的好坏。
选取德国低干扰谱为高速动车组减振器的半主动协调控制的仿真轨道激励,模拟动车组单车模型以250 km/h的速度匀速运行,首先通过347.20 m的直线区段和208.32 m的缓和曲线区段,然后在半径为2 200 m、轨道超高为150 mm的曲线段上运行至1 597.12 m处,再经过208.32 m的缓和曲线区间,最后在直线区段行驶至2 083.33 m处。其动力学仿真结果如图6~10所示。
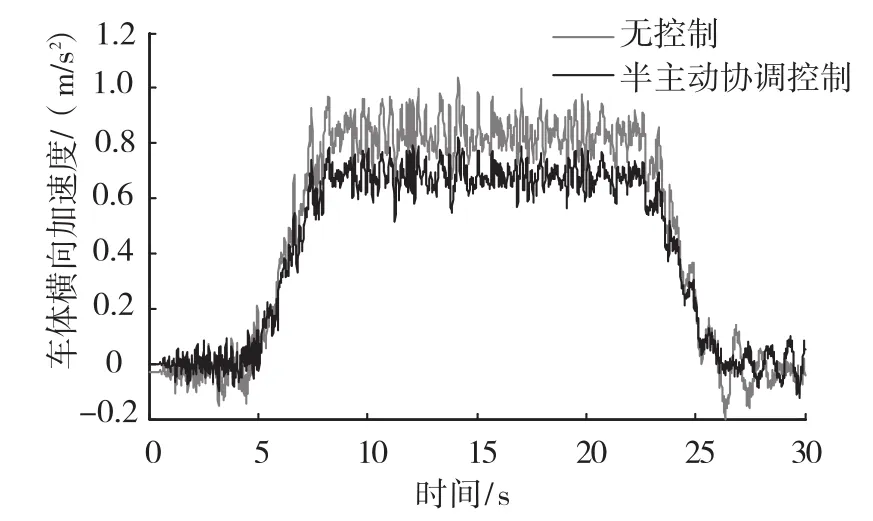
图6 车体横向加速度

图7 脱轨系数
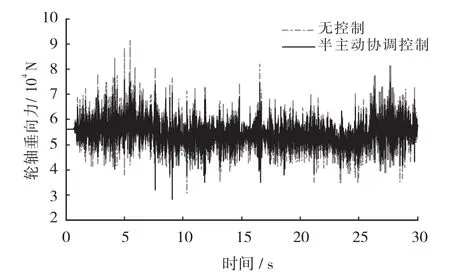
图10 轮轨垂向力
由图6~10可知,与无控制相比,半主动协调控制可大幅降低列车的平稳性指标值与曲线安全性指标值,其中,最大车体横向加速度由1.04 m/s2降到了0.82 m/s2,降幅为26.3%;最大脱轨系数由0.13降到了0.063,降幅可达50%;最大轮重减载率由0.51降到了0.30,降幅为39.9%;最大轮轴横向力从14.6 kN降到10.4 kN,降低了29.2%;最大轮轨垂向力从91.3 kN降到了76.5 kN,降低了16%。
5 结语
本文对单车模型进行仿真分析,发现采用半主动协调控制方法能大幅度地提高列车的平稳性以及曲线通过安全性能。二系横向半主动控制可提高列车平稳性,抗蛇行半主动控制可缓解动车组横向运行平稳性与曲线通过安全性之间的矛盾。半主动协调控制则集合了上述两者的优点。仿真数据表明:采用半主动协调控制,车体横向振动加速度降低了26.3%,最大脱轨系数降低了50%,轮重减载率降低了39.9%,轮轴横向力降低了29.2%,轮轨垂向力降低了16%。
[1] 杨建伟,黄强,李伟,等.基于加速度阻尼控制的半主动悬挂研究[J].铁 道 学 报 ,2006,28(5):22-27.
[2] 杨明辉.半主动悬挂机车横向动力学性能研究[D].成都:西南交通大学,2005.
[3] 熊永刚,谢勇,丁问司,等.机车车辆半主动悬挂控制系统的研究[J].中 南 大 学 学 报 ,2005,36(4):678-682.
[4] 郭孔辉,隋记魁,郭耀华.基于天棚和地棚混合阻尼的高速车辆 横向 减振 器半主动 控 制[J].振 动 与 冲击,2013,32(2):18-23.
[5] 廖英英,刘永强,杨绍普.一种新型混合半主动控制策略在高速 铁 道 车 辆 振 动 控 制 中 的 应 用[J].振 动 与 冲击,2013,32(12):84-87.
[ 6] TANIFUJI K,KOIZUMI S,SHIMAMUNE R.Mechatronics in Japanese rail vehicles:active and semi-active suspensions[J] .Control Engineering Practice,2002,10(9):999-1004.
[7 ] SHIN Y J,YOU W H,PARK JH.Semi-active control to reduce carbody vibration of railway vehicle by.using scaled roller rig[J].Journal of Mechanical Science and Technology,2012,26(11):3423-3431.
[ 8] STRIBERSKY A,KIENBERGERA,WAGNERG,et al.Design and evaluation of asemi-activedamping system for rail vehicles[J].Vehicle System Dynamics,1998,29(S1):669-681.
[9] 王 成国 .MSC.ADAMS/Rail基 础 教程 [M].北 京 :科 学 出 版社 ,2005:275-292.
[10] 刘永强,廖英英,杨绍普,等.一种抗蛇行减振器控制系统在高速动车组中的仿真应用[J].石家庄铁道大学学报,2015,28(2):68-72.
Simulation Analysis of Semi-active Coordination Control of High-speed EMU Based on VI-Rail
ZHAO Yiwei,LIU Yongqiang,ZHANG Xinli,LIAO Yingying,MA Zengqiang
In order to improve the operation quality of highspeed EMU,a coordination control method based on lateral semi-active and anti-hunting semi-active is proposed.Firstly,VI-Rail software is used to establish a bicycle model,then,the semi-active coordination control method is used to make the dynamic simulation,the results are compared with the quality of train operation in passive control mode.On this basis,the influence of the semi-active coordination control method on running stability and curve passing performance is explored.Simulation results show that the semi-active coordination control method can improve the quality of EMU operation obviously compared to the passive control mode,and alleviate effectively the contradiction between train running stability and curve passing performance.
EMU model; semi-active control; lateral damper;anti-hunting damper
U270.1+1:U291.91+4
10.16037/j.1007-869x.2017.10.009
First-author′s address School of Mechanical Engineering,Shijiazhuang Tiedao University,050043,Shijiazhuang,China
* 国家自然科学基金项目 (11227201,11202141, 11302137,11472179,11572206,11372199); 河北省自然科学基金项目(A2013210013,A2015210005);河北省教育厅项目(YQ2014028)
2015-10-28)
