支援干扰掩护下反辐射无人机突防技术*
2017-11-20唐汇禹彭世蕤孙经蛟刘香岚
唐汇禹,彭世蕤,孙经蛟,刘香岚
(空军预警学院,湖北 武汉 430019)
支援干扰掩护下反辐射无人机突防技术*
唐汇禹,彭世蕤,孙经蛟,刘香岚
(空军预警学院,湖北 武汉 430019)
针对高速或低速平台配合高速战机突防时,速度距离协同精度要求高、随队干扰时间短以及干扰掩护效率不高的问题,提出了两型机动能力相当的低速平台无人机配合突防的策略,即采用远距离支援干扰机掩护反辐射无人机突防至一定区域,雷达干扰无人机全程随队掩护反辐射无人机,仿真结果表明,该策略具有干扰掩护效率高、干扰资源节省、航迹配合容易的优点。
反辐射无人机;雷达干扰无人机;远距离支援干扰;随队支援干扰;突防;航迹
0 引言
反辐射无人机是一种利用敌方雷达辐射的电磁信号发现、跟踪、以至最后压制或摧毁雷达的武器系统[1],是掩护航空兵突防、开辟进攻通道的“杀手锏”武器。反辐射无人机具有发射后不管的特点,要在复杂战场环境下完成攻击或者压制任务,就必须深入研究巡航阶段的防护问题。
对于巡航阶段的防护策略,最常用的是采用支援干扰来掩护突防飞机。目前的支援干扰掩护策略中,往往是高速或低速平台配合高速战机突防,这种配合方式需要进行速度和距离的精确协同,且只能实现局部的随队干扰[2-3],效率不高,而针对低速干扰无人机配合低速突防无人机的相关研究还较少[4-13]。
对此本文提出两型速度相近的低速平台的无人机配合突防的策略,即采用雷达干扰无人机以随队支援干扰的方式掩护反辐射无人机突防,同时只需很少的远距离支援干扰资源,即可达到掩护反辐射无人机突防的目的。具有速度和距离协同容易、占用干扰资源少、可实现全程随队干扰以及干扰压制效果好的优点,充分发挥了两型无人机的作战潜力,有效提高了效费比。
1 随队支援干扰对抗模型
1.1随队支援干扰建模
随队支援干扰就是干扰机和目标飞机相隔较近,两者机动能力相当一起飞行,干扰机辐射的强干扰信号主要从主瓣进入雷达接收机,从而达到掩护目标飞机的目的。相较于远距离支援干扰,随队支援干扰具有距离优势和功率优势,因而干扰效率高。
随队支援干扰机干扰单部雷达态势如图1所示[14]。
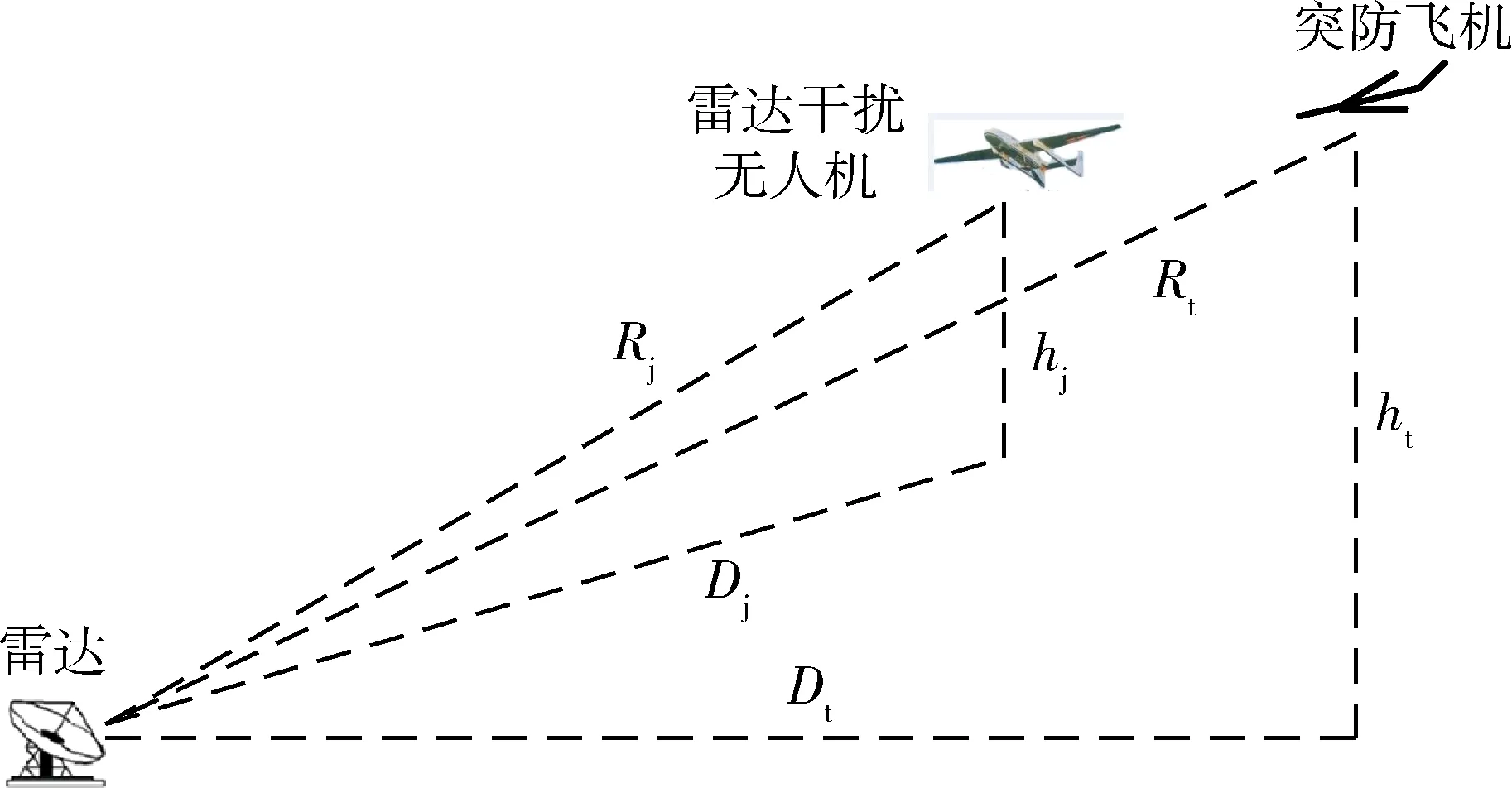
图1 随队支援干扰态势图Fig.1 Situational diagram of escort jamming
图1中,Rj为雷达干扰无人机距雷达直线距离;Dj为水平距离;hj为其高度;Rt为反辐射无人机距雷达距离;ht为其飞行高度;Dt为其水平距离。
由于反辐射无人机起始位置距离敌方雷达较远,若从出发就采用随队支援干扰,则由于干扰距离太远而等效干扰功率较小,会导致干扰效率不高,因此,可以考虑首先用远距离支援干扰机掩护雷达干扰无人机和反辐射无人机,到达一个较近的合适位置再进行随队干扰。
进行随队支援干扰时,干信比须大于等于压制系数Kj才能对雷达形成有效干扰[15],此时有

(1)

若干扰机和目标处于雷达的同一分辨单元之内,此时雷达不能区分干扰机和目标,两者视为同一个目标,此时有Rj=Rt,则式(1)可化为
(2)
当两者不处于雷达同一分辨单元之内,此时雷达视其为2个目标,假设干扰机领先目标距离Ra进行导前干扰,则有Rj=Rt-Ra,那么式(1)可化为

(3)
1.2随队主瓣干扰分析
当用雷达干扰无人机对组网雷达进行随队支援干扰时,一方面由于等效干扰功率PjGj很小,约为几W到几十W,此时若不能保证干扰信号从主瓣进入雷达接收机,压制效果将很差,不能有效掩护目标无人机,因此,必须保证干扰信号能够从主瓣进入雷达接收机,此时实际表现为自卫干扰;另一方面,由于干扰波束并不是全方位的,当干扰机距离组网雷达较近时,不能保证干扰信号能从所有雷达主瓣进入,对此,必须考虑采用2架或多架干扰机进行组阵干扰,从而实现全程随队干扰的同时,能够保证对组网雷达实施主瓣干扰。
(4)
(5)
对式(4)和式(5)分别进行开平方和解一元二次方程就可求得此时雷达的有效探测距离Rt,由此可知,进行随队主瓣干扰时,雷达有效探测范围为一个半径为Rt的圆。
2 随队干扰航迹配合条件
假设两型无人机的作战对象为组网雷达,用远距离支援干扰机掩护随队编队至一定区域后进行随队支援干扰,其态势如图2所示。

图2 随队支援干扰组网雷达态势图Fig.2 Situational diagram of escort jamming interfere networked radar
图2中,假设雷达1为地面警戒雷达,其探测范围最远,以其为原点建立直角坐标系,单部远距离支援干扰机可以掩护目标沿着警戒雷达1暴露区凹口(例如正北方向)方向至距离警戒雷达一定距离处,即图中T1点,此时可以开始进行随队支援干扰,由前述分析可知,此时已经距离雷达阵地较近,必须考虑干扰波束能否覆盖整个组网雷达。
图2中,T1O1,T2O2分别为雷达2,3以及反辐射无人机三者在不同位置的角平分线,则分析态势图可知,当采用一架雷达干扰无人机1沿着x轴负轴(正北)朝向警戒雷达1飞行时,此时前向干扰波束能够覆盖雷达1和雷达4,且可从主瓣进入,但是不能保证进入雷达2和雷达3的主瓣,因此还不能达到有效掩护反辐射无人机突防的目的,对此必须再增加1架雷达干扰机2用来干扰雷达2和雷达3,为保证干扰机2的侧向干扰波束能够进入雷达2,3主瓣,则干扰机2的航迹可始终位于角平分线T1O1,T2O2上,此时只要雷达2,3以及反辐射无人机三者之间夹角不超过干扰波束宽度φ0.5,都可完成对雷达2,3的有效压制,若超过则可考虑再增加一架,分析过程不变。
为求得雷达干扰机2的配合航迹(x2(t),y2(t))以及干扰机1的航迹(x1(t),y1(t)),可假设反辐射无人机以速度v匀速沿着x轴负轴朝向雷达1飞行,起始点位置T1为(x0,0),终点位置T2为(xt,0),则T2=(x0-vt,0),雷达2,3位置分别为(xr2,yr2),(xr3,yr3),待求干扰机2位置J2为(x2(t),y2(t)),干扰机1,2都导前反辐射无人机距离Ra飞行,则可表示为如图3所示。

图3 随队支援干扰航迹配合示意图Fig.3 Schematic diagram of escort jamming route coordination
由图3可知,t时刻下,干扰机1的航迹(x1(t),y1(t)),干扰机2的航迹(x2(t),y2(t))可分别表示为
(6)
(7)
式中:x1(t),y1(t),x2(t),y2(t)分别为干扰机1,2航迹的横纵坐标,θT2(t),θr2(t)可分别由式(8)和式(9)求得:
θT2(t)=
(8)
(9)
式中:T2B,T2C分别为目标距雷达2,3的直线距离,可分别由式(10)和式(11)求得:

(10)

(11)
3 仿真分析
假设本文的作战目的为掩护反辐射无人机进入到组网雷达阵地(30,0)处,即图2中T2点,该点距离雷达1已经较近,认为可以遂行作战任务,雷达干扰机1导前1.5 km飞行对准雷达1进行前向干扰,雷达干扰机2位于角平分线上对准雷达2,3进行侧向干扰,组网雷达坐标按顺序分别为:(0,0),(55,50),(25,80)以及(-35,15)。
考虑极端情况,在T2点时雷达2,3以及反辐射无人机三者间夹角θT2最大,可根据位置坐标计算出θT2≈30°<60°,完全满足进入雷达2,3主瓣需求,此时雷达1和雷达4受到雷达干扰机1的主瓣干扰,雷达2,3受到雷达干扰机2的主瓣干扰,假设组网雷达参数如表1所示,雷达干扰机的参数如表2所示。

表1 组网雷达参数Table 1 Parameter of networked radar

表2 雷达干扰机参数Table 2 Parameter of radar jamming UAV
假设两型无人机RCS为σ=0.5 m2,则根据式(5)就可计算出各部雷达的暴露区,仿真结果如图4所示,具体的各部雷达暴露区如表3所示。

图4 随队干扰时组网雷达暴露区Fig.4 Exposed area of escort jamming

表3 导前干扰下组网雷达暴露区Table 3 Exposed area of networked radar when leading interference km
由图4和表3可知,进行随队支援干扰后,当干扰信号从雷达主瓣进入时,表现为自卫干扰,组网雷达的探测范围被极大压缩,其中雷达1的探测范围被压缩至27.2 km,特别地,雷达2探测范围被压缩至3.5 km,可以有效完成掩护任务,同时仿真结果也表明,雷达干扰无人机配合反辐射无人机突防的策略可以很大程度上提高干扰掩护效率,并且有效节省干扰资源。
假设反辐射无人机以v=170 km/h匀速飞行,单部远距离支援干扰机可掩护目标至T1=100 km处,在前述条件下,雷达干扰机1,2的航迹如图5所示。

图5 雷达干扰机航迹Fig.5 Route of radar jamming UAV
由图5可知,雷达干扰机2无须做很大的机动就能很好地掩护目标,这也说明了前述掩护策略的有效性和可行性。
雷达干扰无人机未进行导前干扰时,即和目标的距离在雷达的一个分辨单元之内时,由式(4)可知,此时组网雷达的暴露区如表4所示。
对比表3和表4可知,对各部雷达来说,导前干扰下的雷达探测距离要略低于未导前干扰下各雷达的探测距离,同时,在一定的导前干扰距离下,随队编队能够利用导前空间有效避免相互碰撞。因此可以得出如下结论:在一定的导前距离范围内进行随队干扰,干扰效果要略优于未导前干扰下的随队干扰,且可避免编队内由于气候、导航误差等因素引起的各无人机相互碰撞。

表4 未导前干扰下组网雷达暴露区Table 4 Exposed area of networked radar when no leading interference km
4 结束语
本文针对高速或低速平台配合高速战机突防时,速度距离协同精度要求高、随队干扰时间短以及效率不高的问题,提出了两型机动能力相当的低速无人机配合突防的策略。仿真结果表明,该策略具有干扰掩护效率高、干扰资源节省、航迹配合容易的优点。
[1] 罗红英,刘进忙.反辐射无人机及其对抗技术[J].指挥控制与仿真,2009,31(3):121-124.
LUO Hong-ying,LIU Jin-mang.Anti-Radiation UAV and Its Antagonistical Technique[J].Command Control & Simulation,2009,31(3):121-124.
[2] 李文鹏,杨文,廖明飞,等.基于低速平台的随队支援干扰系统随队干扰能力分析[J].指挥控制与仿真,2014,36(6):69-72.
LI Wen-peng,YANG Wen,LIAO Ming-fei,et al.Capability Analysis of Escort Jamming System Based on Low-speed Platform[J].Command Control & Simulation,2014,36(6):69-72.
[3] 李文鹏,杨文,廖明飞,等.低速平台随队支援干扰编队设计及过程分析[J].火力与指挥控制,2015,40(5):175-178.
LI Wen-peng,YANG Wen,LIAO Ming-fei,et al.Formation Design and Process Analysis of Escort Jamming System Installed in Low-Speed Platform[J].Fire Control & Command Control,2015,40(5):175-178.
[4] 余立志,张新如,李传杰.干扰飞机多方式干扰警戒雷达效果仿真[J].雷达科学与技术,2013,11(3):251-254.
YU Li-zhi,ZHANG Xin-ru,LI Chuan-jie.Simulation of Effect of Electronic Jamming Aircraft on Warning Radar in Multiple Jamming Modes[J].Radar Science and Technology,2013,11(3):251-254.
[5] 支熙,吴华,李彬.远距离支援干扰性能的分析与仿真[J].火力与指挥控制,2010,35(5):65-68.
ZHI Xi,WU Hua,LI Bin.Analysis and Simulation of Stand-off Jamming Capability[J].Fire Control & Command Control,2010,35(5):65-68.
[6] 马亚涛,曹星江,李德权.分布式干扰系统对雷达干扰的布阵方法[J].舰船电子对抗,2013,36(5):20-23.
MA Ya-tao,CAO Xing-jiang,LI De-quan.Embattling Methods of Distributed Jamming System for Jamming Radar[J].Shipboard Electronic Countermeasure ,2013,36(5):20-23.
[7] 陈晓榕,李彦志,鲁建华.基于ADC法的随队支援干扰基本效能评估[J].电子科技,2012,25(12):21-23.
CHEN Xiao-rong,LI Yan-zhi,LU Jian-hua.Evalution of the Basic Efficiency of ESJ by ADC Method[J].Electronic Sci&Tech,2012,25(12):21-23.
[8] 党双平,汤亚波.压制性雷达干扰无人机的支援干扰动态效能建模[J].火力与指挥控制,2014,39(7):148-151.
DANG Shuang-ping,TANG Ya-bo.Modeling Dynamic Effectiveness of Blanket Radar Jamming UAV in Support Jamming Operations[J].Fire Control & Command Control,2014,39(7):148-151.
[9] 李子杰,刘湘伟,廖文龙,等.掩护突防中雷达干扰无人机压制干扰航路优选[J].现代雷达,2015,37(2):79-82.
LI Zi-jie,LIU Xiang-wei,LIAO Wen-long.Oppressive Jamming Path Optimization of Radar Jamming UAV in Task of Covering Penetration[J].Modern Radar,2015,37(2):79-82.
[10] 杨继庚,董文锋,余国文,等.电子战无人机分布式干扰路径规划[J].电光与控制,2016,23(8):39-43.
YANG Ji-geng,DONG Wen-feng,YU Guo-wen,et al.Distributed Interference Path Planning for Electronic Warfare UAVs[J].Electronics Optics & Control,2016,23(8):39-43.
[11] 平殿发,张伟,张韫.远距离干扰模式下电子战飞机有效配置区域的确定[J].火力与指挥控制,2014,39(7):144-147.
PING Dian-fa,ZHANG Wei,ZHANG Yun.Analysis and Estimation of Airborne Jammer Disposition Zone[J].Fire Control & Command Control,2014,39(7):144-147.
[12] 饶德虎,黄高明,陈旗.电子干扰协同突防下航迹规划研究[J].电光与控制,2010,17(5):18-21.
RAO De-hu,HUANG Gao-ming,CHEN Qi.Route Planning of Low-Altitude Penetration with Cooperation of Electronic Jamming[J].Electronics Optics & Control,2010,17(5):18-21.
[13] 龙世敏,彭世蕤,王振华,等.基于航迹协同的相控阵雷达干扰方法研究[J].现代防御技术,2016,44(1):175-179.
LONG Shi-min,PENG Shi-rui,WANG Zhen-hua,et al.Interference Method to Phased Array Radar Based on Collaborative Track[J].Modern Defence Technology,2016,44(1):175-179.
[14] 周武,董文锋.无人机掩护突防时对雷达分布式干扰策略[J].电子信息对抗技术,2013,28(6):63-67.
ZHOU Wu,DONG Wen-feng.The Distributed Jamming Tactics of UAV Against Radar in Shield Aircrafts Penetration[J].Electronic Information Warfare Technology,2013,28(6):63-67.
[15] 孙经蛟,于家傲,彭世蕤,等.干扰无人机编队对组网雷达干扰效果[J].电子信息对抗技术,2016,31(3):47-50.
SUN Jing-jiao,YU Jia-ao,PENG Shi-rui,et al.The Inerference Effect of Jamming UAV Formation Against The Netted Radar[J].Electronic Information Warfare Technology,2016,31(3):47-50.
TechniquesofAnti-RadiationUAVPenetrationUnderSupportJamming
TANG Hui-yu ,PENG Shi-rui ,SUN Jing-jiao ,LIU Xiang-lan
(Air Force Early Warning Academy,Hubei Wuhan 430019,China)
Aiming at the problems of high requirement on speed and distance,low co-interference time in escort jamming and low efficiency of shielding,which in high-speed or low-speed platform penetrates with high-speed fighters,the strategy of two types of unmanned aerial vehicle (UAV) with proportionable mobility and low-speed platform are proposed.In other words,stand-off jamming shields anti-radiation UAV to penetrate to a certain area,and radar jamming UAV shields anti-radiation UAV in whole process with escort jamming.The simulation results show that the proposed strategy has the advantages of high efficiency of interference shielding ,saving interference resource ,and easy to cooperate track.
anti-radiation unmanned aerial vehicle (UAV);radar jamming UAV; stand-off jamming; escort jamming; penetration; track
2016-10-20;
2017-02-15
唐汇禹(1991-),男,湖南张家界人。助教,硕士,主要从事电子信息对抗技术研究。
通信地址:430019 湖北省武汉市黄浦大街288号E-mail:347756313@qq.com
10.3969/j.issn.1009-086x.2017.05.003
TN97;V279.2
A
1009-086X(2017)-05-0012-05
