协同干扰环境下基于IMOABC的任务调度方法
2017-11-20娄艳秋顾晶晶
娄艳秋,庄 毅,顾晶晶,霍 瑛
(1.南京航空航天大学 计算机科学与技术学院,江苏 南京 210000;2.南京工程学院 计算机工程学院,江苏 南京 210000)
协同干扰环境下基于IMOABC的任务调度方法
娄艳秋1,庄 毅1,顾晶晶1,霍 瑛2
(1.南京航空航天大学 计算机科学与技术学院,江苏 南京 210000;2.南京工程学院 计算机工程学院,江苏 南京 210000)
在协同干扰环境下,除了需要考虑最大限度地完成干扰任务,还需要最大程度地减少己方的损失消耗。在这种复杂的需求下,需要将协同干扰环境下的任务调度问题转化为多目标优化问题。针对如何最大限度地完成干扰任务,同时最大程度地减少无人作战飞行器(UCAV)的能量损失消耗问题,将干扰贡献值和损失消耗值作为目标函数,建立了基于多目标优化的协同干扰任务调度模型(MOTSM)。提出了基于多目标优化的改进人工蜂群算法(IMOABC)的任务调度算法来求解该模型。IMOABC算法首先进行染色体的二进制编码,然后随机生成一个满足MOTSM模型约束条件的初始种群。对初始种群进行非支配快速排序以及拥挤度距离的计算,通过雇佣蜂、观察蜂、侦察蜂三种蜜蜂的配合,完成对最优解的搜索。通过仿真实验验证了该模型与算法的有效性。
协同干扰;多目标优化;任务调度;人工蜂群算法
0 引 言
在现代化的信息战中,无人作战飞行器(Unmanned Combat Aerial Vehicle,UCAV)凭借其零伤亡率、高灵活性等特点活跃在军事的各个领域,比如电子干扰。战场环境中如何对UCAV进行合理的任务调度成为了无人机指挥与控制的关键技术之一,同时也受到了国内外专家学者的关注与研究。以往的研究大多是将协同干扰环境下的任务调度问题作为单目标优化问题来考虑,其重点在于如何有效构造组合方案使其满足所有的约束条件并使其适应度值达到全局最优。但是在现实战场上,除了需要考虑最大限度地完成干扰任务,也需要最大程度地减少己方的损失消耗。在这种复杂的需求下,迫切需要将协同干扰环境下的任务调度问题转化为多目标优化问题,通过相应算法求解出一组最优非劣解,让决策者根据现实战场环境来进行选择。
针对上述问题,提出了基于多目标优化的任务调度模型。与单目标的优化模型不同,该模型以最大化干扰贡献值、最小化损失消耗值为两个目标进行优化。其中,干扰贡献值是对UCAV的多个指标(除续航能力外)的综合评估。为求解该模型,提出了一种基于多目标优化的改进人工蜂群算法(Improved Multi-Objective Artificial Bee Colony,IMOABC),用蜜蜂的觅食行为来模拟对任务调度方案的搜索,并通过实验对该算法进行验证。
1 相关研究
协同干扰环境下,基于多目标优化的任务调度问题本质上是一个多目标、多约束条件、高耦合度的武器目标分配问题;因此将从多目标优化的角度,并结合该领域的研究现状,对协同干扰环境下基于多目标优化的任务调度问题进行探索和研究。
武器目标分配问题属于NP难问题,很难在有限的时间内获得最优的解决方案[1]。因此,研究多目标优化问题,从而能在有效时间内获取最优解决方案,对提高效率、增强电子干扰效果具有重要的理论和实践意义。
对于武器目标分配问题,国内外专家和学者已经进行了大量研究。例如,Wu Ling等提出了一种基于改进遗传算法的随时算法,用以求解武器目标分配问题,从而使得目标生存值最小[2]。该算法约定,在目标到达前对每个武器逐一进行分配。当目标被分配到一定数目的武器之后,这个目标在整个染色体中被一个新的目标替换,同时,整个优化过程不进行任何重启。Chen Jie等提出了一种以四种类型的约束为基础的武器目标分配模型,包括能力约束、策略约束、资源约束和参与可行性约束。提出使用一个通用的“虚拟”决策代表以方便产生可行的决定。为了求解该模型,改进了三种进化决策算法,包括一种遗传算法和两种文化基因算法。实验表明,基于贪婪局部搜索的文化基因算法能够得到更好的武器目标分配方案,特别是对大规模的问题,明显优于遗传算法和基于梯度的局部搜索的文化基因算法[3]。H Naeem等提出一种稳定婚姻算法来讨论一种最优多空中威胁评估和武器分配问题。采用了一种新的武器调度算法,允许多主体使用攻击-搜索-攻击策略,计算接近最优的解决方案[4]。Xin B等提出了一个通用的基于资产的武器目标分配模型,特别是对战争的武力协调问题。并提出了一种禁忌搜索算法来求解该模型[5]。Atif Shahzad等提出了一个离散事件系统仿真模型,考虑了资源约束、能力约束、战略约束和参与的可行性约束。采用三种不同的方法:MMR、无禁忌搜索以及提出的基于人工智能的模拟优化的混合框架。生成一组规则的基础上的优化模块,然后采用实时控制[6]。但是以上研究都基于单目标的武器目标分配,只有少量研究基于多目标的武器目标分配。如Zhang Ying等在静态武器目标分配模型的基础上,提出了一种武器目标分配模型,并设计了一种基于分解的多目标进化算法求解该模型[7]。
目前,国内外的研究人员对多目标优化方法的研究大致分为两个方向:一个是传统的数学规划法,另一个则是智能优化算法,且主要集中在对智能优化算法的研究上。传统的数学规划法采用规划的思路,通过穷举得到最优的分配方案,典型的方法有割平面法、分支定界法等[8]。使用这些方法,通常能得到问题的全局最优解,但是其计算效率较低,且随着问题规模的上升呈指数增长,无法满足武器目标分配的实时要求。
智能优化算法是一类通过模拟某一自然现象或过程而建立起来的优化方法,典型的有遗传算法、粒子群算法、禁忌搜索、人工免疫系统、蚁群算法、人工蜂群算法等。与传统的数学规划法相比,使用智能优化算法求解多目标优化问题显得更为合适。首先,大多数智能优化算法能同时处理一组解,每次运行算法,就能获得多个有效解。其次,智能优化算法对帕累托最优前端的形状和连续性不敏感,因此可以很好地逼近非凸或是不连续的最优前端。其中,由于人工蜂群算法的提出时间较晚,对于这方面的研究还比较少。但是因其参数设置少、收敛速度快、收敛精度高且不易陷入局部最优等特点越来越受到研究者的广泛关注。如Xiang Yi等通过引入精英策略提出了一种新的多目标人工蜂群算法。该算法使用一个固定大小的档案保持基于拥挤距离来存储搜索过程中的非劣解。在观察蜂和雇佣蜂阶段,档案中的精英都有可能被选择和使用,从而在每个周期产生新的食物源。为了保持多样性,当档案发生变化时,位于最拥挤区域的成员将被删除[9]。Huo Ying等在原始ABC算法中加入多目标优化策略,提出基于精英的多目标人工蜂群算法,并在随机服务集和真实服务集验证了该算法的有效性[10]。赵辉等针对多无人机协同任务分配问题经过单目标简化后对决策处理存在的片面性和主观性等问题,提出了一种利用多目标自适应快速人工蜂群算法对其进行处理的方法。首先,建立多目标无人机协同任务分配模型;其次通过建立外部种群的约束处理技术及重置Harmonic平均距离循环策略对自适应快速人工蜂群算法进行改进,另外通过定义自主决策准则引导多目标任务分配的方案选取[11]。
综上,目前对多目标的武器目标分配问题的研究还存在一些不足。首先,对多目标的武器目标分配问题的模型缺少深入研究,不少模型都是在静态武器目标分配模型或是单目标武器目标分配模型的基础上进行一个简单的重复;其次,在目前已有的对武器目标分配问题的研究中,大部分没有考虑到协同作战的问题;最后,缺乏多目标的武器目标分配问题求解算法,只有找到高效实时的求解算法,才能为军事指挥与控制决策提供有力的支持。因此,对多目标武器目标分配问题展开研究具有实际意义。
2 多目标任务调度问题建模
2.1决策变量描述
假设我方提供一支拥有n架UCAV的电子干扰远程支援编队(U={U1,U2,···,Un},其中Ui表示第i架UCAV),需要对敌方的m部分布离散的地面雷达(D={D1,D2,…,Dm},其中Dj表示第j部雷达)进行干扰作战,并且规定每部地面雷达最多分配lmax架UCAV,同时每架UCAV只能选择一部雷达进行干扰。则编队方案集合可以表示为UD={UD1,UD2,…,UDn},其中UDi(i=1,2,…,n)表示将第i架UCAV分配给干扰目标雷达的设备号,并且1≤UDi≤m,UDi∈N。多目标任务调度就是从所有满足约束条件的编队方案中选取一个使目标最优的方案。因此该问题的决策变量即为编队方案,可以用一个一维数组表示。其中数组下标表示UCAV编号,数组内容表示干扰目标编号。
2.2优化目标1:最大化干扰贡献值
干扰效果评估模型是评价编队方案质量的重要标准,由多个维度构成,从不同方面对编队方案的质量进行评价。文中参考文献[12],可以得到任务调度评估指标集q(eji,j)={qjp(eji,j),qjs(eji,j),qjf(eji,j),qjt(eji,j)},具体含义如表1所示。
在真实战场上,当面对的敌方雷达较强时,单架UCAV的功能是有限的。为了满足战场日益复杂的攻击、防守需求,需要将多架UCAV进行组合来提供复杂的功能;同时,也需要将任务进行合理分配,运用合适的武器组合来实现任务调度利益最大化。任务调度的指标集用Q(ej)={Q1,Q2,…,Qr},其中Qk表示任务的第k维指标的聚合值,是由各候选武器装备的指标值qk(eji,j)聚合得到[13]。
表2给出了各指标的聚合函数。
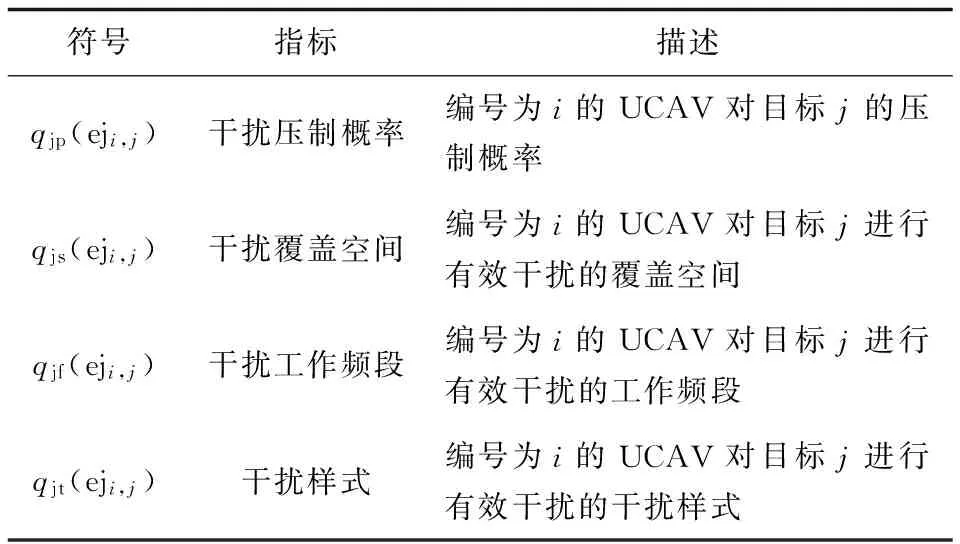
表1 任务调度评估指标描述
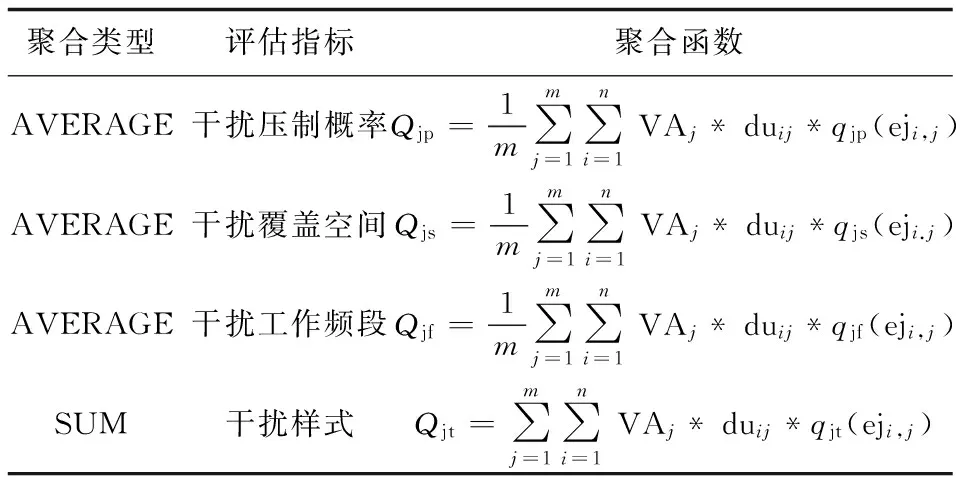
表2 聚合函数
采用简单加权和法(Simple Additive Weighting,SAW),对各指标按照重要程度赋予不同的权重,再通过加权和计算得到综合评价值。但由于指标评价时采用了不同的方法且量纲也不同,因此首先必须将指标进行归一化。
在归一化阶段,将指标分为积极指标和消极指标。归一化时要分别处理,参考文献[14],方法如下:
(1)
其中,maxQk(minQk)表示所有任务调度方案中第k维指标的最大值(最小值),如果两者相等,则指标的归一化值为1。

任务调度的干扰贡献度值的计算函数feva如下:
(2)
2.3优化目标2:最小化损失消耗值
协同电子干扰中,为了减少UCAV的耗损,需要考虑其续航能力,尽可能最小化损失消耗值,使其在完成任务之后能够顺利返回。可以用qea(eji,j)来表示编号为i的UCAV对目标j进行干扰后的损失消耗值。其聚合函数如式(3)所示。
(3)
为便于后续优化过程中的计算,损失消耗值的计算函数felo同样通过归一化值来表示,计算公式如式(4)所示。
(4)
2.4多目标优化模型
为了满足决策者在进行有限损失消耗的基础上制定干扰效果最优的编队方案的需求,设定任务调度的干扰贡献值最大化maxfeva,损失消耗值最小化minfelo为两个优化目标,设计基于多目标优化的任务调度模型MOTSM。为便于求解,将minfelo转化为max(-felo),转化后模型如下:
(5)
式(5)表明模型的目的是用来寻找使目标函数最大化的调度方案。其中,ωk为第k维指标的权重;UniQk为第k维指标的归一化值。约束条件是用来保证算法所求的调度方案中每个UCAV对目标雷达进行干扰时,满足干扰频率、干扰样式等要求。其中, UD={UD1,UD2,…,UDn},UDi(i=1,2,…,n)表示将第i架UCAV分配给干扰目标雷达的设备号;VAj(j=1,2,…,m)表示对第j部目标雷达进行干扰的价值量;duij表示第i架UCAV是否对第j部目标雷达进行干扰,若为0则表示不进行干扰,否则就进行干扰;lmax表示每部目标雷达最多分配UCAV的架数。
3 基于IMOABC的任务调度算法设计
为求解协同干扰环境下的多目标优化问题,设计基于IMOABC的任务调度算法。设计染色体编码方式来对协同干扰环境下的任务调度方案进行编码,并描述快速支配选择,种群选择、交叉及变异操作,以及多目标适应度计算等多目标优化策略。
3.1编码方式
U表示UCAV编队,D表示地面雷达组,UD表示协同干扰环境下的任务调度方案。当有9架UCAV需要对3部目标雷达进行干扰时,即U={1,2,3,4,5,6,7,8,9},D={1,2,3}。如果分配编号为1,2,3的UCAV对1号雷达进行干扰,分配编号为4,5,6,7的UCAV对2号雷达进行干扰,分配编号为8,9的UCAV对3号雷达进行干扰。文献[16]采用的是分组染色体编码方式,即UD={{1<->1,2,3},{2<->4,5,6,7},{3<->8,9}};文中对文献[16]的编码方式进行改进,用一维数组进行表示:数组下标表示UCAV编号,数组内容表示干扰目标编号,即UD=[1,1,1,2,2,2,2,3,3]。
3.2算法描述
3.2.1 初始种群确定

(6)
其中,duij∈{0,1}。
这样每一个种群可以转换成二进制的编码方式,而相较于十进制编码方式,二进制编码方式的搜索效率更高,对变异概率和交叉概率的鲁棒性更好。
3.2.2 快速非支配排序
IMOABC算法在选择运算之前需要对种群中的个体的优劣程度进行分级,而快速非支配排序方法就是目前多数多目标优化问题中判断个体优劣程度的方法。基本思想是根据可行解之间的支配关系对种群中的个体目标函数值进行排序,从而为后续的选择、进化提供依据。
快速非支配排序算法需要记录两个变量的值:支配个数np,记录可支配可行解UD的所有个体的数量;被支配集Sp,是可被可行解UD支配的解的集合。
对于可支配可行解UD中的每个个体ud,令np=0。如果存在ud',使得ud支配ud',则把ud'添加到Sp列表中,否则ud被ud'支配,则np=np+1。如果np=0,则该个体ud为第一级,即ud.rank=1。同时遍历被支配集Sp,使集合中每个个体的支配个数都减1。如果此时该个体的支配个数为0,则该个体是非支配个体,将该个体级别记为当前最高级别加1,同时将该个体存入新列表Sq。针对Sq重复以上步骤,可得到ud.rank=3的解。重复以上步骤,直到Sq为空集。
3.2.3 种群选择、交叉和变异操作
(1)种群选择策略。
选择策略是为了在进行交叉和变异操作前提供一种策略,能够选择优越性较大的个体作为父代种群。非支配排序完成后,通过计算每个解的拥挤度距离,能够得到两个重要属性,即非支配排名ud.rank和拥挤度距离ud.distance。文中采用轮赛制选择算子,根据这两个属性设计的种群选择策略如下:
①在种群完成非支配排序之后,从种群中随机选择两个个体,记为udi和udj。如果udi.rank
②对需进行选择策略的种群重复步骤①SN次,就可以得到下一代种群中的SN个个体。
使用轮赛制选择算子,可以保证淘汰最差的个体,同时最大限度地保留最优个体。而选择较小的非支配排名可以使解向质量更好的方向进化,选择较大的拥挤度距离则可以使种群中可行解的分布更加均匀,从而提高解的多样性。
(2)种群交叉和变异操作。
遗传算法是一种借鉴生物界自然选择和进化机制发展起来的搜索算法。自然界中生物的进化是通过染色体交叉、变异、重组来生成新的染色体,因此遗传算法中的交叉也是通过交换个体的基因来生成新的个体。通常使用的适用于二进制编码方式的交叉算子有单点交叉、两点交叉、多点交叉以及均匀交叉等。遗传算法中的变异算子则是通过改变个体内部的基因来保持种群中个体的多样性。
文中将遗传算法与ABC算法相结合,在雇佣蜂和观察蜂进行邻域搜索时,对于新产生的邻域解,采用多点交叉算子进行交叉操作,采用二进制位取反变异算子进行变异操作。多点交叉算子是指在选择的两个个体中随机设置多个交叉点,然后基于这些交叉点将位于两交叉点之间的基因互相交换。二进制位取反变异算子则是以一定的概率将所选的个体中的某些位置按位取反。
3.2.4 多目标适应度值计算方法
在ABC算法中,可行解的适应度值是通过单目标函数值来确定的。但是在文中所述的多目标优化问题中,由于目标函数不止一个,目标函数值也有多个,因此原有的计算方法不再适用,需要对适应度值计算方法进行更新。
文中优化的目标数为2,maxf(x)=[f1(x),f2(x)]=[feva,-felo],即f1(x)=feva,f2(x)=-felo。由于两个目标所衡量的对象不一样,在计算适应度值前,需要将目标函数值进行归一化处理,如式(7)所示。
(7)
其中,maxfk=max{fk(x1),fk(x2),…,fk(xSN)},minfk=min{fk(x1),fk(x2),…,fk(xSN)},k=[1,2]。
可行解的适应度值计算公式如式(8)所示。
(8)
3.2.5 基于IMOABC的任务调度算法流程
基于IMOABC的任务调度算法,首先进行染色体的二进制编码,然后随机生成一个满足MOTSM模型约束条件的初始种群,对初始种群进行非支配快速排序以及拥挤度距离的计算,然后分别进行雇佣蜂、观察蜂、侦察蜂的行为,直到迭代次数结束或者满足条件生成最后的最优解。
算法步骤如下:
Step1:参数初始化,根据MOTSM模型对种群初始化,并计算目标函数-feva和felo的值,对生成的SN组食物源进行非支配排序,计算其拥挤度距离;
Step2:对于每只雇佣蜂,在其所依附的食物源的邻域内进行局部搜索,并将新生成的邻域解进行交叉、变异操作,得到一个新的食物源,并计算新食物源的目标函数-feva和felo的值。对现有的所有食物源进行非支配排序,计算其拥挤度距离,根据选择策略选择前SN组作为新的食物源集合;
Step3:对于每只观察蜂,根据轮盘赌法选择食物源,在其所依附的食物源的邻域内进行局部搜索,并将新生成的邻域解进行交叉、变异操作,得到一个新的食物源,并计算新食物源的目标函数-feva和felo的值。对现有的所有食物源进行非支配排序,计算其拥挤度距离,根据选择策略选择前SN组作为新的食物源集合;
Step4:当食物源进行limit次进化仍保持原样时,雇佣蜂变成侦察蜂,随机产生一个新的食物源位置重新进行搜索;
Step5:判断迭代次数是否达到最大循环次数MCN,如果没有达到,则跳至Step2,否则退出循环,并输出当前的食物源位置信息作为最优解。
4 实验与结果分析
为了验证MOTSM模型和基于IMOABC的任务调度算法的可行性,以最大化干扰贡献值和最小化损失消耗值为目标进行了两组实验。实验1用来验证文中设计的基于IMOABC的任务调度算法是否可以较好地解决协同电子干扰环境下的任务调度问题;实验2用来验证基于IMOABC的任务调度算法与现有的一些多目标优化算法相比,能否给出更优的解。
实验1的参数具体设置如下:种群规模为20,迭代限制次数为50,最大循环次数为2 500。图1为实验1的仿真结果图。
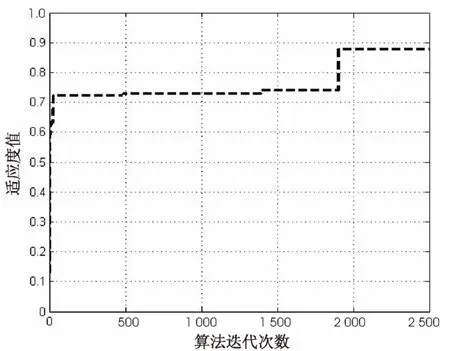
图1 实验1的仿真结果
从图1可以看出,基于IMOABC的任务调度算法较好地求出了协同电子干扰环境下任务调度问题的最优解,使得干扰贡献值最大,损失消耗值最小。
实验2是与多目标优化算法EMOABC[10]进行对比。参数设置同实验1。实验结果和执行时间对比分别如图2和图3所示。
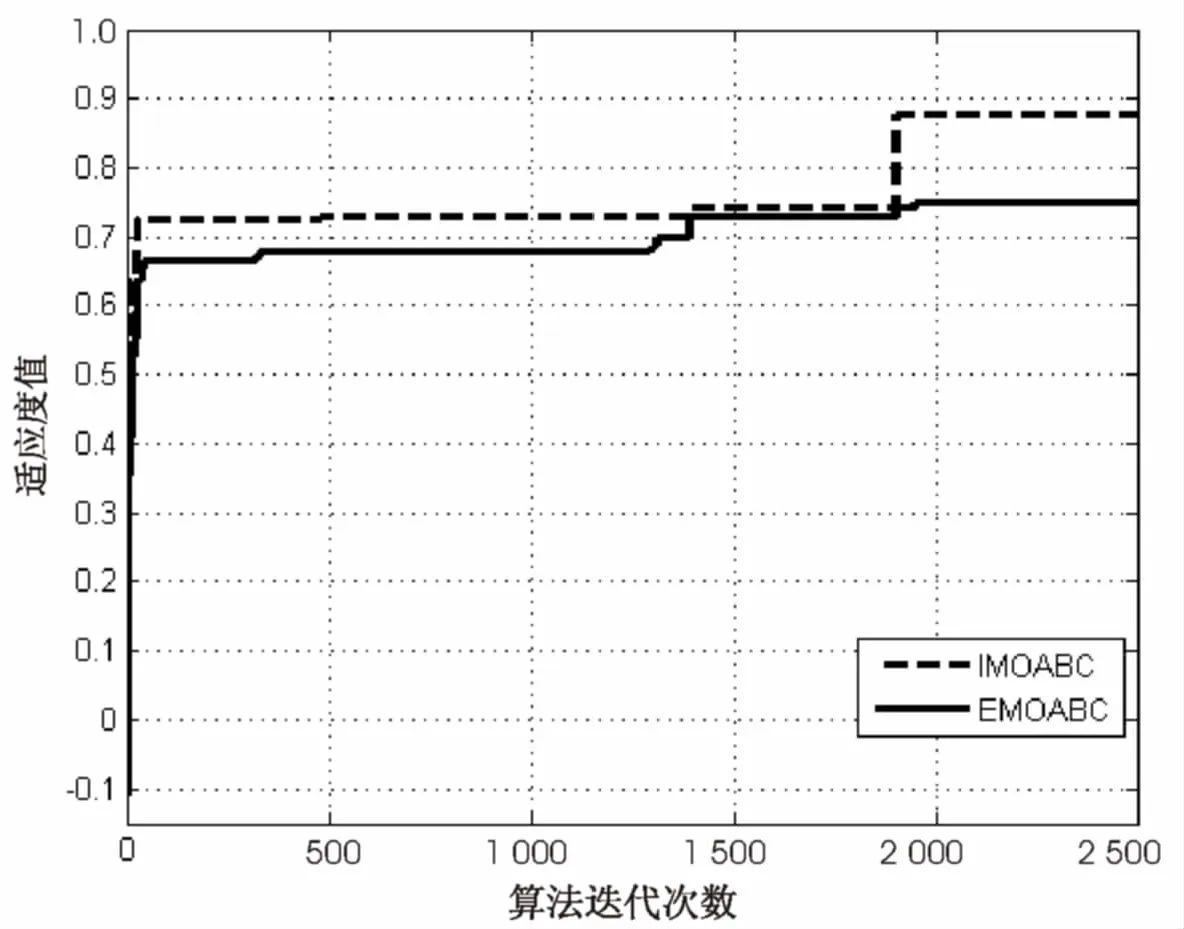
图2 不同算法对比
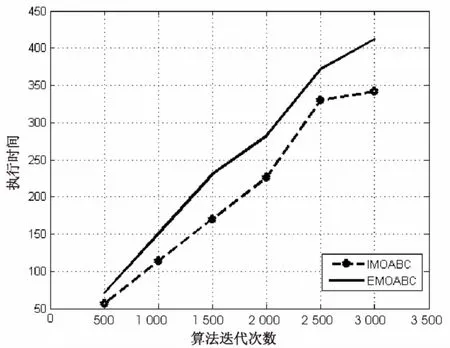
图3 时间对比
从图2和图3中可以看出,基于IMOABC的任务调度算法在实验结果和执行时间上都优于EMOABC算法,能更好地解决协同电子干扰环境下的任务调度问题,进行更优的任务调度。
5 结束语
在综合考虑UCAV在协同干扰环境下的干扰贡献值和损失消耗值的前提下,提出了一种基于多目标优化的协同干扰任务调度算法。将协同干扰环境中的任务调度问题建模为一个多目标优化问题,将干扰贡献值和损失消耗值作为目标函数,建立了基于多目标优化的任务调度模型IMOTSM,并设计了基于IMOABC的任务调度算法来求解该模型。实验结果表明,IMOABC算法能够对协同干扰任务进行有效的调度与管理,且能在减少损失消耗值的同时获得更高的干扰贡献值。
[1] 翟晓峰.资源调度机制的研究及其在电子对抗中的应用[D].南京:南京航空航天大学,2010.
[2] Wu L,Wang H Y,Lu F X,et al.An anytime algorithm based on modified GA for dynamic weapon-target allocation problem[C]//IEEE congress on evolutionary computation.[s.l.]:IEEE,2008:2020-2025.
[3] Chen Jie,Xin Bin,Peng Zhihong,et al.Evolutionary decision-makings for the dynamic weapon-target assignment problem[J].Science in China,2009,52(11):2006-2018.
[4] Naeem H,Masood A.An optimal dynamic threat evaluation and weapon scheduling technique[M].[s.l.]:[s.n.],2010.
[5] Xin B,Chen J,Zhang J,et al.Efficient decision makings for dynamic weapon-target assignment by virtual permutation and tabu search heuristics[J].IEEE Transactions on Systems Man & Cybernetics Part C,2010,40(6):649-662.
[6] Shahzad A,Ur-Rehman R.An artificial intelligence based novel approach for real-time allocation of armament to hostile targets[C]//International Bhurban conference on applied sciences and technology.Bhurban:IEEE,2013:141-146.
[7] Zhang Y,Yang R,Zuo J,et al.Improved MOEA/D for dynamic weapon-target assignment problem[J].哈尔滨工业大学学报:英文版,2015(6):121-128.
[8] 王 邑,孙金标,肖明清,等.基于类型2区间模糊K近邻分类器的动态武器-目标分配方法研究[J].系统工程与电子技术,2016,38(6):1314-1319.
[9] Xiang Y,Zhou Y,Liu H.An elitism based multi-objective artificial bee colony algorithm[J].European Journal of Operational Research,2015,245(1):168-193.
[10] Huo Y,Zhuang Y,Gu J,et al.Elite-guided multi-objective artificial bee colony algorithm[J].Applied Soft Computing,2015,32(C):199-210.
[11] 赵 辉,李牧东,韩 统,等.基于多目标MQABC算法的无人机协同任务分配[J].华中科技大学学报:自然科学版,2016,44(3):121-126.
[12] 薛 羽,庄 毅,张友益,等.基于启发式自适应离散差分进化算法的多UCAV协同干扰空战决策[J].航空学报,2013,34(2):343-351.
[13] Huo Y,Yi Z,Gu J,et al.Discrete gbest-guided artificial bee colony algorithm for cloud service composition[J].Applied Intelligence,2015,42(4):661-678.
[14] Ardagna D,Pernici B.Adaptive service composition in flexible processes[J].IEEE Transactions on Software Engineering,2007,33(6):369-384.
[15] Saaty T L.How to make a decision: the analytic hierarchy process[J].European Journal of Operational Research,1990,48(1):9-26.
[16] Xu J,Fortes J A B.Multi-objective virtual machine placement in virtualized data center environments[C]//IEEE/ACM international conference on green computing and communications & 2010 IEEE/ACM international conference on cyber,physical and social computing.[s.l.]:IEEE,2010:179-188.
ATaskSchedulingMethodBasedonIMOABCinCollaborationInterferenceEnvironment
LOU Yan-qiu1,ZHUANG Yi1,GU Jing-jing1,HUO Ying2
(1.School of Computer Science and Technology,Nanjing University of Aeronautics &Astronautics,Nanjing 210000,China;2.School of Computer Engineering,Nanjing Institute of Technology,Nanjing 210000,China)
Not only the maximization of interference tasks but the minimization of energy loss itself is needed to be considered in the collaborative interference environment.In this complex requirements,it is necessary to convert task scheduling into multi-objective optimization in the collaborative interference environment.Aiming at the problem of how to maximize the interference tasks and minimize the energy loss of Unmanned Combat Aerial Vehicle (UCAV) simultaneously,the Multi-Objective based Task Scheduling Model of collaborative interference (MOTSM) is established which takes contribution value and loss consumption as the objective functions.A task scheduling algorithm based on Improved Multi-Objective Artificial Bee Colony (IMOABC) is developed to solve the proposed model.First,it carries out the binary coding of chromosomes.Then an initial population that satisfies the MOTSM constraints is generated randomly,and performed in rapid non-dominated sorting and calculation of crowding distances.Through the cooperation of the three bees including the employed bees,onlookers and the scouts,the search for the optimal solution is finished.Finally,the effectiveness of the proposed model and algorithm is verified by simulation experiments.
collaboration interference;multi-objective optimization;task scheduling;artificial bee colony
2016-11-21
2017-03-21 < class="emphasis_bold">网络出版时间
时间:2017-08-01
国家自然科学基金面上项目(61572253);国家自然科学基金青年科学基金项目(61202351);国家博士后基金项目(一等)(2011M500124)
娄艳秋(1991-),女,硕士生,研究方向为智能优化算法;庄 毅,教授,研究方向为网络与分布式计算、信息安全、可信计算。
http://kns.cnki.net/kcms/detail/61.1450.TP.20170801.1550.032.html
TP301
A
1673-629X(2017)11-0046-06
10.3969/j.issn.1673-629X.2017.11.010