汽车驾驶性能客观表征与仿真分析
2017-11-17刘普辉李义顺
刘普辉,李义顺
(浙江吉利汽车研究院有限公司,浙江 宁波 315336)
刘普辉(1983—),男,博士.E-mail:liupuhui@163.com
汽车驾驶性能客观表征与仿真分析
刘普辉,李义顺
(浙江吉利汽车研究院有限公司,浙江 宁波 315336)
构建合理有效的客观表征指标体系是实现驾驶性能从主观评价到客观量化分析的关键.在探索人车交互作用关系的基础上,将汽车驾驶性能评价划分为5个方面:全负荷响应、部分负荷响应、加速踏板感觉、换挡平顺性与急踩/松加速踏板瞬态响应.在详细分析各客观表征指标的基础上,基于层次分析结构建立驾驶性能综合评价指标体系.以某自动挡乘用车型为例,借助Simulink和AVL Cruise/GSP工具构建整车纵向动力学仿真模型,对比分析最佳燃油经济性和综合性换挡策略下的部分表征指标,为实现驾驶性能客观量化分析提供了参考.
驾驶性能; 客观表征; 仿真分析
驾驶性能反映了驾驶员在汽车纵向行驶过程中人车交互作用下的主观综合感觉,体现了汽车产品市场定位与品牌基因,影响着消费者购买意愿,是提升产品竞争力的关键[1].主观评价作为传统驾驶性能开发方式,存在着费时费力、重复性低、对试验环境要求高、对测试驾驶员个体依赖性强等不足[2].近年来,随着测试与仿真技术的进步,驾驶性能客观量化分析逐渐成为主观评价的重要补充.
本文在国内外实践经验的基础上,从分析驾驶员与汽车交互作用关系入手,将驾驶性能划分为5个主要方面,细化了客观表征指标,构建了综合评价指标体系,进而建立仿真模型实现驾驶性能的客观量化分析.
1 驾驶行为分析
1.1驾驶员-汽车-环境闭环控制系统
驾驶性能隶属于汽车纵向动力学性能的范畴.如图1所示[3],在驾驶员-汽车-环境闭环控制系统中,驾驶员同时承担着操纵车辆以及根据车辆动态响应来控制车辆的任务.驾驶性能描述了在整个汽车纵向行驶闭环控制系统中驾驶员动态感觉、决策行为、操作行为、车辆动态响应过程之间的交互关系,并以驾驶员的期望满意度为最终评价依据.
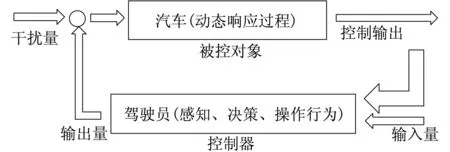
图1 驾驶员-汽车-环境闭环控制系统Fig.1 Driver-vehicle-environment closed-loop system
1.2驾驶员与汽车交互作用关系
驾驶员对车辆的操作输入包括加速/离合/制动踏板操作、挡位选择操作(驾驶员动作行为);在驾驶员输入、道路、环境等因素的综合作用下,动力由发动机经传动系统传递给轮胎以克服行驶阻力使车辆前进,输出速度与加速度,同时振动冲击、俯仰角速度、延迟等车辆响应由悬置、车身、踏板、方向盘、座椅等路径传递给驾驶员(车辆动态响应);驾驶员实时感知汽车动态响应,并与期望模式进行比较判断,并据此做出相应的反馈操作(驾驶员感知与决策).这种驾驶员动作行为、车辆动态响应、驾驶员动态感知与决策行为及之间的交互关系如图2所示.

图2 驾驶员与汽车响应交互作用关系Fig.2Interaction relationship betweendriver and vehicle response
1.3驾驶员感知、决策与动作行为及主客观描述
感知行为是指驾驶员通过触觉、视觉、听觉等对车辆实时响应及道路环境等信息的获取过程.驾驶员决策行为是以“车辆响应、驾驶员感觉、驾驶员期望、环境信息”为输入,以“驾驶员动作行为”为输出的一种映射关系,同时,受到驾驶员个性特征及驾驶习惯的影响.驾驶员决策行为的表征指标体现为针对特定情景的“决策规则”和“决策反应时间”两个方面.决策规则能够对驾驶员的动作行为特征进行描述,如加速、减速、维持、换挡等情形,而决策时间可以对决策反应的及时性和有效性进行评估[4].驾驶员动作行为是对驾驶员决策指令的动作实现,源于驾驶员对车辆响应的动态感知及其与驾驶员期望的差值.这些期望差值累计到一定程度会引起驾驶员抱怨,如表1所示,工程师所做的是力图将这些主观描述性语言转化为工程开发相对应的客观表征指标,从而建立起主观评价到客观量化分析的桥梁,通过定量分析优化客观指标以提高驾驶性能主观评分.

表1 驾驶性能主观描述与客观表征Tab.1Subjective descriptions and objectivecharacteristics for drivability evaluation
1.4驾驶性能关键特征识别
基于驾驶员动作行为、车辆动态响应、驾驶员感知与决策行为及之间的交互关系,同时借鉴国内外驾驶性能主观评价开发经验,识别驾驶性能关键特征,将驾驶性能评价划分为5个主要方面:全负荷响应、部分负荷响应、加速踏板感觉、换挡平顺性和瞬态工况响应,如图3所示.在此基础之上,下文将对各方面客观表征指标展开研究.
2 客观表征指标
2.1全负荷响应
全负荷特性是指汽车在发动机节气门全开(Wide Open Throttle,WOT)即加速踏板100%开度下的纵向极限行驶能力.从获得尽可能高的平均行驶速度的观点出发,汽车动力性常采用最高车速、加速时间、最大爬坡度3个客观指标来评价.动力性影响着汽车的平均行驶效率和行驶安全,是汽车各种性能中最基本、最重要的性能之一.

图3 驾驶性能评价的5个主要方面Fig.3 5 main aspects of drivability assessment

(1)

(2)

(3)
式中:vmax为最高车速(km/h);Ft为最大牵引力(N);m为车辆质量(kg);f为轮胎滚动阻力系数;α为道路坡度(%);ρair为空气密度(kg/m2);Cd为空气阻力系数;Af为迎风面积(m2);t为加速时间(s);v1,v2分别为初始与终止车速(km/h);δ为车辆旋转质量转换系数;αmax为最大爬坡度(%);Dmax为最大动力因素.
2.2部分负荷与加速度响应曲面
部分负荷(Part Open Throttle,POT)加速度响应是考核驾驶性能的重要方面.作者选取了近20辆不同级别的汽车样本,统计分析了包含中国NEDC、日本1015和美国FTP 3种不同循环工况下的车辆加速踏板开度和纵向加速度数据.如图4和图5所示,在典型的车辆道路循环过程中,加速踏板开度<20%的低负荷运行接近60%;加速踏板开度>80%的高负荷运行不足2%;近99%的运行情况下纵向加速度都低于0.15g.这充分说明部分负荷特性对于研究驾驶行为特性的重要性和必要性.
加速度响应曲面以纵向直线行驶车速和加速踏板开度为影响因子,考虑不同车速和负荷下的车辆稳态纵向加速度响应.加速度响应曲面重点考虑了低负荷区域(通常取加速踏板开度<30%)的加速度响应、车速和踏板开度三者之间的关系.加速度响应曲面从整车层面很好地描述了汽车在不同负荷与车速下的车辆响应特性.加速踏板开度输入与发动机转矩输出之间的非线性关系,以及换挡时机的选择是加速度响应曲面的关键影响因素.
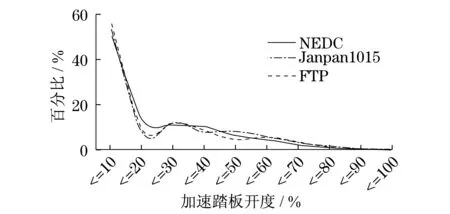
图4 加速踏板开度统计分析Fig.4 Statics analysis of accelerator pedal position

图5 纵向加速度统计分析Fig.5 Statics analysis of longitudinal acceleration
2.3加速踏板感觉
加速踏板是驾驶员与车辆之间交互最多、最重要的功能模块之一.驾驶员根据车辆实际动态响应与期望的反馈做出比较、判断与决策,进而通过调整加速踏板力与行程来控制动力输出大小.
2.3.1加速踏板力与位移关系曲线
加速踏板设计需要考虑人机工程学,同时以操作轻便度、舒适度以及驾驶性能为设计目标.力与位移关系特性曲线是加速踏板设计的基础指标.如图6所示,通过对踏板初始力、光滑度、95%开度力与位移、止动点力、止动位移、回程力、滞后力区间等技术指标的合理设计与量化分析,以达到加速踏板感觉性能的设计要求[5].

图6 加速踏板力与位移关系特性曲线Fig.6 Accelerator pedal force-travel curve
2.3.2加速度线性度
在车辆稳态加速过程中,按一定速率缓慢增大加速踏板开度,要求加速度保持在一定范围内而不出现较大的波动,具体体现在加速度标准方差控制在一定的范围内,且纵向加速度与加速踏板开度保持一定的线性相关性(即加速度线性度).通过回归分析得到相关系数,来衡量纵向加速度线性度,相关系数越大越好.加速度线性度体现了一定速度范围内稳态加速过程中,加速踏板开度与纵向加速度响应之间的跟随关系,是加速踏板感觉的重要评价特征之一.
2.3.3加速度增益
良好的加速踏板-纵向加速度感觉,除了受加速度线性度的影响,还与单位加速踏板开度下的纵向加速度响应特性关系密切.加速踏板力输入-加速踏板位移-节气门开度-发动机负荷-纵向加速度响应输出之间体现出复杂的非线性关系,该关系影响着驾驶员的主观感觉,是车辆品牌基因的重要特征之一.加速度增益表征了单位踏板位移下的车辆纵向加速度,在一定程度上反映加速踏板位移输入与纵向加速度响应输出之间的非线性关系,计算公式如下:

(4)
式中:again为加速度增益(m·s-2·mm-1);DPel为加速踏板位移(mm).
单位踏板位移输入下,加速度增益值越大则车辆纵向加速度响应值越大,车辆运动感越强.通过设定合理的加速度增益目标区间以达成加速踏板位移与加速度期望输出关系,从而实现特定产品的品牌特征.
2.4换挡平顺性
换挡平顺性是驾驶性能的重要组成部分.纵向加速度与冲击度是车辆在行驶方向上的变量,与人体的主观感觉密切相关,对换挡舒适性影响较大.尤其是冲击度表征了车辆动力传递过程的平顺性,其峰值直接反映了人体主观感觉上瞬态的冲击.加速度均方根值描述了纵向加速时间历程中的平均加速度值,考察了加速度持续时间和变化快慢.振动剂量描述了加速度对驾乘人员的累积作用程度,其比加速度均方根值对峰值加速度更加敏感,能够更好地估计偶尔遇到过大脉冲引起的高峰值振动,以反映动力传递过程中的瞬态冲击与颠簸.相关指标的计算公式如下:

(5)

(6)

(7)

(8)

2.5急踩/松加速踏板瞬态响应
急踩加速踏板(Tip in)和急松加速踏板(Tip out)瞬态响应工况,可以根据加速度响应曲线的形状来评价驾驶性能.如图7所示,某固定车速和挡位下急踩加速踏板瞬态响应工况,通过缩短响应延迟、减少加速度凹陷以及抑制加速度振荡等方法,可以有效改善驾驶员主观感觉,提升驾驶性能.
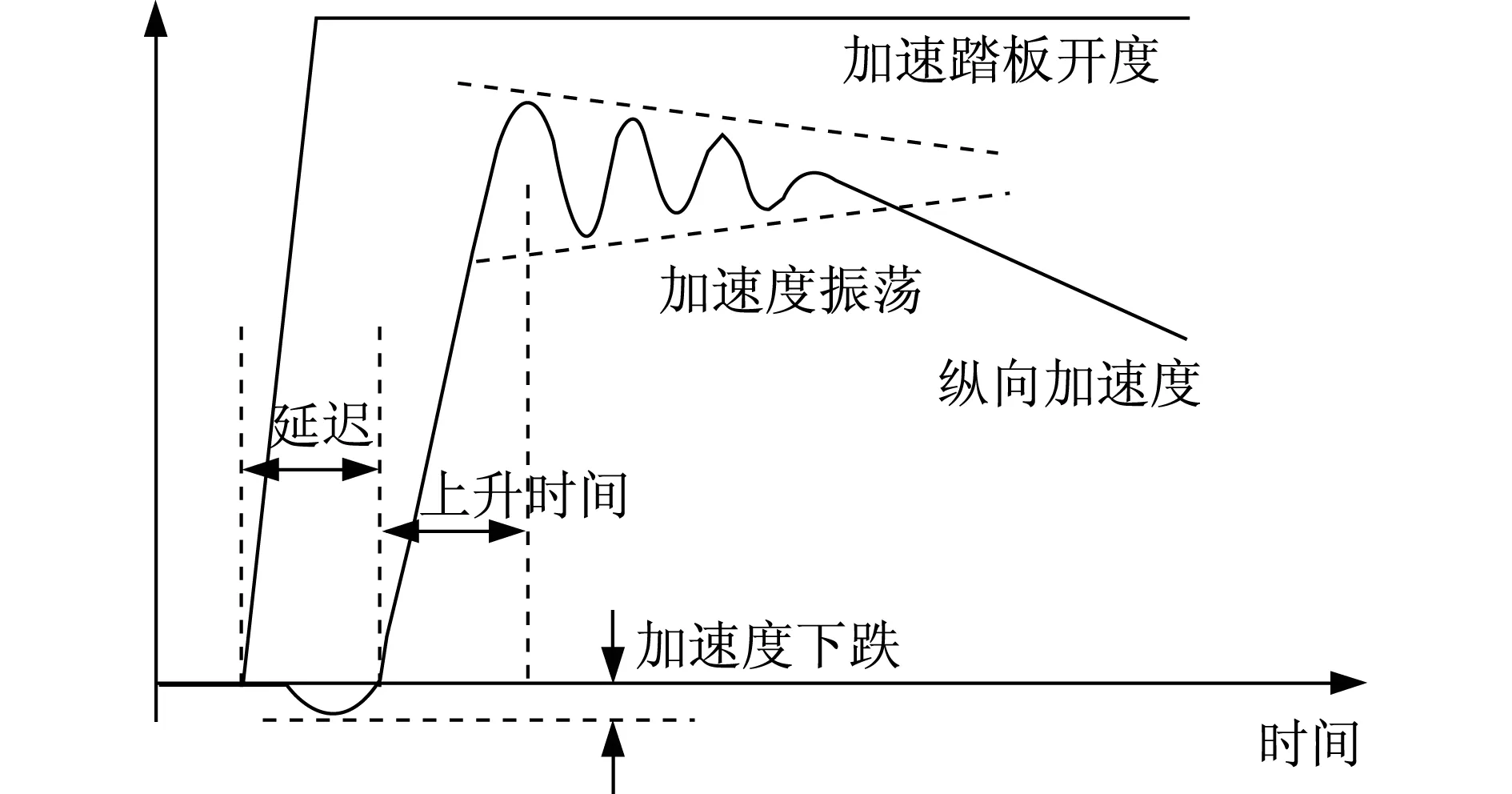
图7 急踩加速踏板瞬态响应Fig.7 Tip in transient response
除以上介绍的5个主要方面,发动机启动与关闭响应、怠速稳定性、起步性能、车内噪声水平、PRND挡位模式切换特性等都会影响驾驶员的主观感觉,是驾驶性能评价的重要方面,在此不再一一赘述.
3 综合评价指标体系构建
驾驶性能是一个庞大而复杂的系统,反映其水平、影响其变化的因素较多,需建立有效的综合评价指标体系对其进行客观准确完整的评价.结合上文研究内容并借鉴国内外主观评价与客观测试经验[6-7],同时,力求以指标可比、可测、定性与定量相结合为原则,基于层次分析结构建立综合评价指标体系,如表2所示.所构建指标体系共分3层.
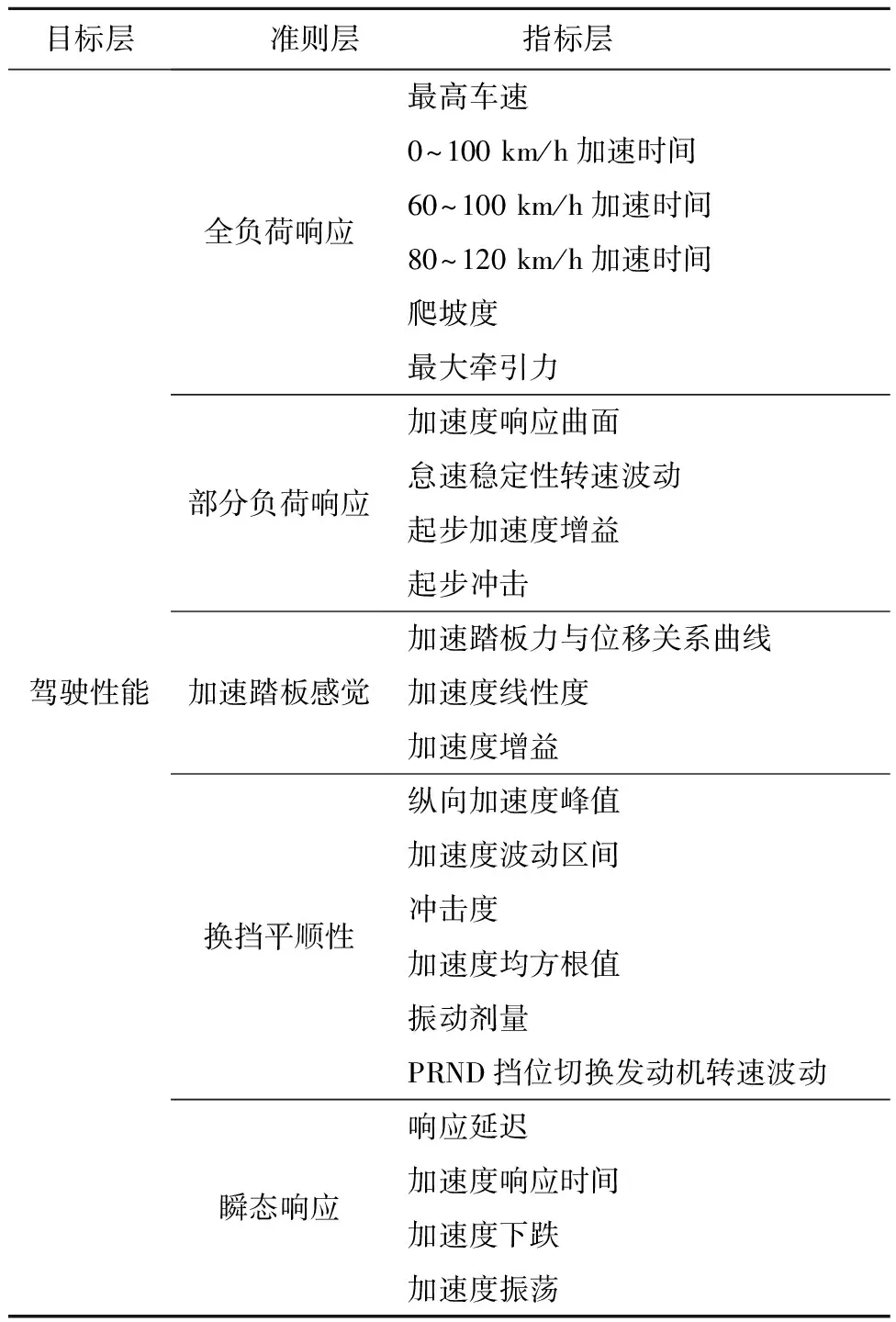
表2 驾驶性能客观评价指标体系Tab.2 Objective index system for drivability evaluation
(1) 第1层表示待解决问题的目标,称为目标层.对于汽车驾驶性能综合评价问题而言,目标就是汽车驾驶性能综合评价结果.
(2) 第2层表示为实现预定目标所涉及的中间环节,称为准则层.依据前文所构建的汽车驾驶性能综合评价指标体系,将驾驶性能评价划分为全负荷响应、部分负荷响应、加速踏板感觉、换挡平顺性和瞬态响应5个方面作为综合评价准则.
(3) 第3层表示针对每个驾驶性能准则层所建立的多项评价指标,称为指标层.根据每项准则所考虑的侧重点不同,选择不同的评价指标集.
需要注意的是,驾驶性能5个方面既相互影响又统一于一个整体,与车辆动力传动系统匹配、标定优化、整车性能集成密切相关,在车辆开发前期就需要通过市场、法规及竞争对手分析等,制定综合的技术指标规范及目标值,并最终通过指标分解技术实现各方面指标参数的平衡与优化.
4 仿真模型开发与参数分析
量化的指标体系是实现客观测试和仿真分析的前提.为了进一步阐明客观指标的应用,本文以某自动挡乘用车型为例,仿真对比了两种不同换挡策略对驾驶性能的影响.
4.1仿真模型建立
利用AVL Cruise工具建立车辆纵向动力学性能计算模型,借助AVL GSP工具快速生成满足不同性能约束的换挡策略,通过对整车与系统参数优化、换挡策略优化来实现多目标性能平衡,如图8所示.

图8 仿真分析流程Fig.8 Simulation analysis process
4.2GSP换挡策略生成与优化
4.2.1静态初始计算
首先确定4个基本因素:加速踏板开度、挡位、液力变矩器锁止离合器状态以及车速的取值范围,通过矩阵计算得到轮边功率Pwheel、纵向加速度Acc、燃油消耗FC、排放EM、发动机转矩TEng与转速NEng等信息,这些变量均表现为4个基本因素的函数[8]:
Pwheel,Acc,FC,EM,etc.=f(i,PP,lu,v)
(9)
式中:i为变速器挡位;PP为加速踏板开度;lu为液力变矩器锁止离合器状态;v为车速.
4.2.2最佳燃油经济性换挡策略
GSP优化模块可以通过下式进行燃油经济性和排放目标之间的平衡与优化:
Optimum=(1-K)FC+KEM
(10)
式中:FC为燃油消耗指标;EM为排放指标;K为权重因子.当K=0时,只考虑燃油经济性约束,此时得到在不同踏板开度和车速下的油耗最低挡位选择曲面,据此可以描绘出最佳燃油经济性换挡策略.
4.2.3综合性换挡策略
在静态计算的基础上,依据加速踏板开度将换挡曲线划分为低中高负荷3个区域,并分别进行参数设计.低负荷区域重点考虑NVH约束以限制发动机最低转速,同时保证较低的燃油经济性;中负荷区域保证满足一定的后备功率要求以提升车辆动力性能,同时考虑升降挡延迟以避免频繁换挡,以及升降挡转速容差范围以提高舒适性;高负荷区域依据最大加速度准则保证满足连续的加速度输出,同时考虑换挡延迟时间以优化换挡一致性,从而提高车辆驾驶性能[8-9].
基于以上原理,借助AVL GSP工具生成了最佳燃油经济性换挡策略和兼顾油耗、动力性与驾驶性约束的综合性换挡策略,如图9所示为升挡策略的对比.

图9 经济模式与综合模式升挡策略Fig.9Upshift strategies of economicaland comprehensive mode
4.3性能计算结果
以图10所示的原地起步加速连续升挡工况为例进行驾驶性客观指标分析.通过对比不难发现,综合模式的速度上升较快(见图10),换挡时刻较晚且换挡时刻发动机转速较高(见图11).急踩加速踏板瞬态响应过程中纵向加速度最大正值接近7.5 m/s2,换挡过程中出现较大的加速度波动,产生换挡冲击,在急松加速踏板过程中加速度出现瞬态负向峰值(见图12和图13).整个运行工况中加速度均方根值与振动剂量均较大,驾乘舒适性较低(见图14).

图10 车速与加速踏板开度Fig.10 Velocity and accelerator pedal position
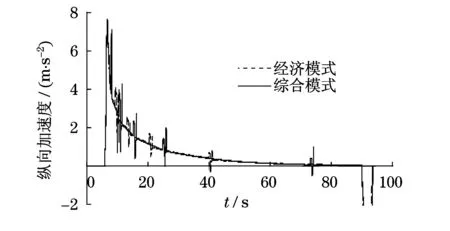
图12 纵向加速度对比Fig.12 Vehicle longitudinal acceleration comparison

图13 冲击度对比Fig.13 Shock impact comparison
上述各个客观指标的量化分析,为进一步制定符合产品基因的换挡策略和实现多目标性能优化提供了参考.由于驾驶性影响因素众多,实现各个指标平衡并非易事,必要的时候,可以损失一部分性能而提高另一方面的表现,以满足特定的产品定位和市场诉求.
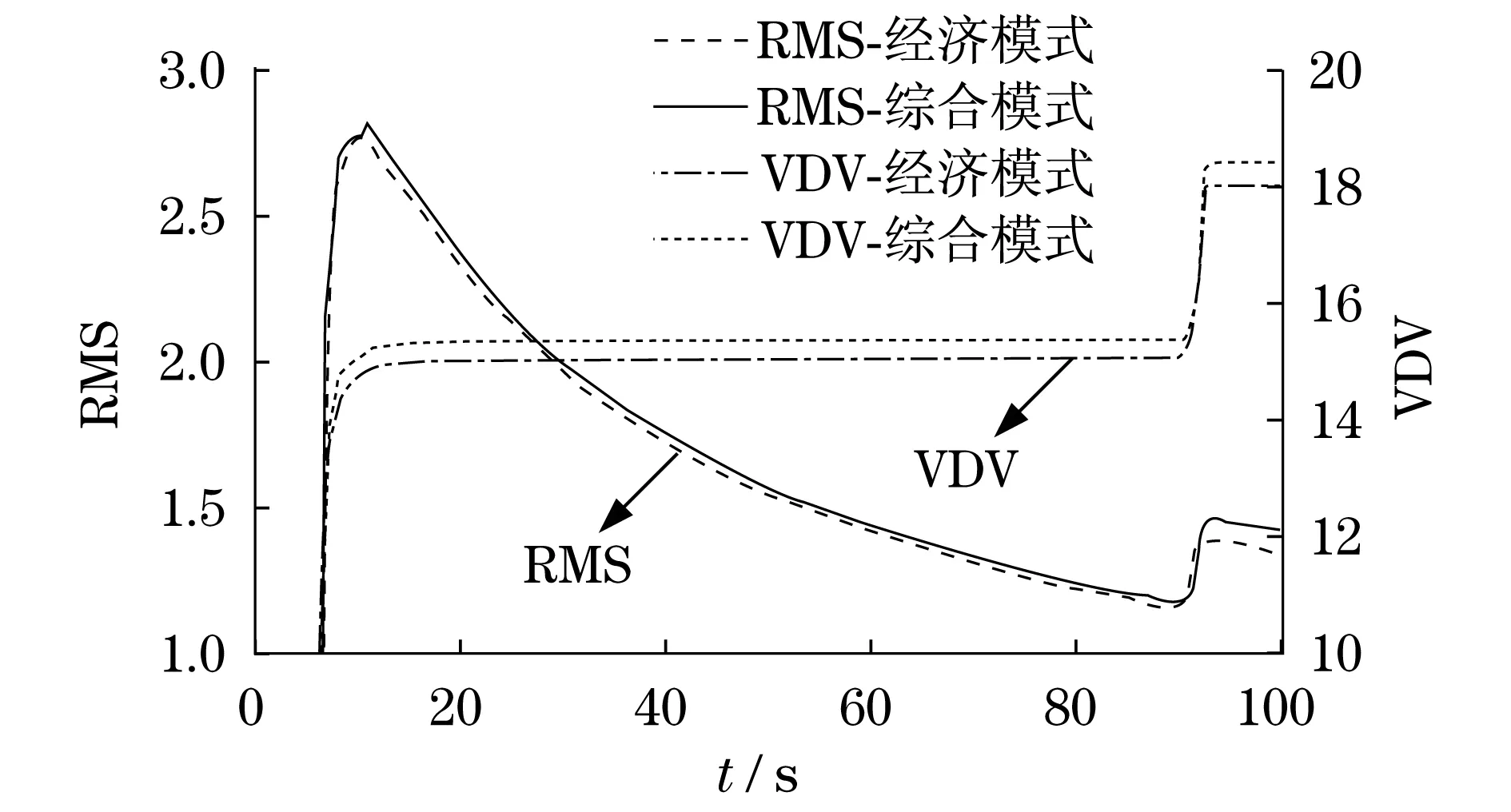
图14 加速度均方根值与振动剂量对比Fig.14 Acceleration RMS and VDV comparison
5 结论
(1) 基于驾驶员-汽车-环境闭环控制系统,从驾驶员动作行为、车辆动态响应、驾驶员动态感知与决策行为特征4个方面,分析了纵向行驶过程中驾驶员与汽车的交互作用关系,探索驾驶性能作用过程,识别驾驶性能关键评价特征.
(2) 引入了汽车驾驶性能评价的5个关键维度,包括全负荷响应特性、部分负荷响应特性、加速踏板感觉、换挡平顺性、急踩/松加速踏板瞬态响应.详细分析了稳态纵向加速度响应曲面、加速踏板-加速度线性度、加速度增益、换挡冲击度、加速度均方根值和振动剂量等客观指标的计算方法,并基于层次分析结构建立了综合的客观评价指标体系.
(3) 以某自动挡车型为例,借助Simulink和AVL Cruise工具构建整车纵向动力学模型,对比分析两种不同换挡策略下的部分驾驶性能客观表征指标,为实现驾驶性能从主观评价到客观量化分析提供了参考.
[1] LIST O H.Objective evaluation of vehicle driveability[R].SAE Technical Paper,980204.
[2] CAPITANI R,DELOGU M,OILO L.Analysis of the influence of a vehicle’s driveline dynamic behavior regarding the performance perception at low frequencies[R].SAE Technical Paper,2001.
[3] 石晓明,陈祯福.汽车行驶动力学性能的主观评价[M].北京:人民交通出版社,2011.
SHI X M,CHEN Z F.Subjective evaluation of automobile dynamics[M].Beijing:China Communications Press,2011.
[4] 李平凡.驾驶行为表征指标及分析方法研究[D].长春:吉林大学,2010.
LI P F.Research on indices and analysis of driving behavior[D].Changchun:Jilin University,2010.
[5] JAWAD B,DRADOIU A.Throttle body design for optimum driver feedback[J].Society of Automotive Engineering,2003(1):2278.
[6] XI W.Modeling and control of a hybrid electric drivetrain for optimum fuel economy,performance and driveability[D].Ohio:The Ohio State University,2004.
[7] 王国青.汽车纵向动力学特性的识别方法研究[D].长春:吉林大学,2007.
WANG G Q.Research on the identification method for vehicle longitudinal dynamics characteristic[D].Changchun:Jilin University,2007.
[8] 周云山,王楠,蔡源春.基于CruiseGSP的DCT整车换挡研究[J].科技导报,2011(12):42.
ZHOU Y S,WANG N,CAI Y C.Shift schedule in the auto with dual clutch transmission based on cruise gear shift program[J].Science & Technology Review,2011(12):42.
[9] GUEN L D,WECK T,BALIHE A.Definition of gearshift pattern:innovative optimization procedures using system simulation[J].Society of Automotive Engineering,2011(1):412.
Objectivecharacterizationandsimulationanalysisofvehicledrivability
LIUPuhui,LIYishun
(Zhejiang Geely Automobile Research Institute Co.,Ltd.,Ningbo 315336,Zhejiang,China)
Constructing reasonable and effective objective characterization system is the key to realize drivability objective and quantitative analysis from traditional subjective evaluation method.The interaction relations between driver and vehicle were explored and the objective metrics were proposed accordingly,emphasizing on five main aspects:WOT(Wide Open Throttle)response,POT(Partial Open Throttle)response,accelerator pedal feeling,gear shift smoothness and tip in/tip out transient response.The objective characterization metrics were investigated in detailed and the comprehensive index system was created with analytic hierarchy structure.One passenger car with automatic transmission was adopted as a case study,the vehicle longitudinal performance model was built based on Simulink and AVL Cruise/GSP tools,the economical and comprehensive shift strategies were generated and the influence on drivability were contrasted and analyzed,the reference was provided for objectively and quantitatively analysis of vehicle drivability.
drivability; objective characterization; simulation analysis
U 462.3
A
1672-5581(2017)04-0370-07
