基于DR/陆基无线电导航的区域导航方法
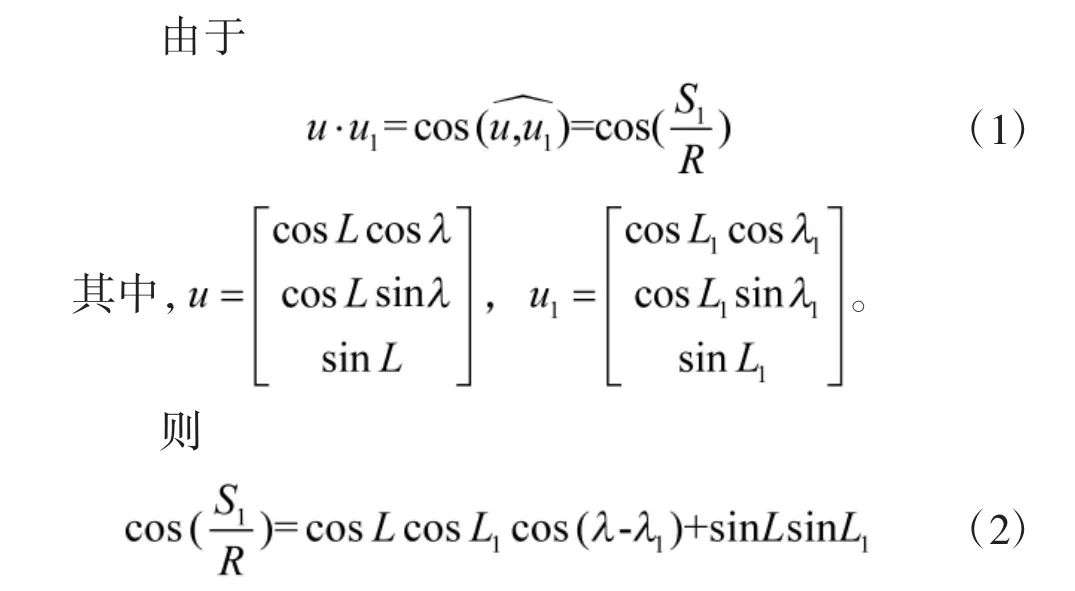
2017-11-17马航帅孙晓敏
马航帅 ,王 丹 ,孙晓敏
(1.航空电子系统综合技术重点实验室,上海 200233;2.中国航空无线电电子研究所,上海 200233)
基于DR/陆基无线电导航的区域导航方法
马航帅1,2,王 丹1,2,孙晓敏1,2
(1.航空电子系统综合技术重点实验室,上海 200233;2.中国航空无线电电子研究所,上海 200233)
为提高区域导航系统的性能,提出了一种基于DR/陆基无线电导航的区域导航方法。基于陆基无线电导航定位原理建立了DME斜距和VOR方位角的误差模型,在此基础上建立了DR/陆基无线电导航的组合模型,最后采用上海虹桥机场到北京首都机场的RNAV航路进行了仿真验证,仿真结果表明:设计的区域导航系统能够实现位置的精确估计,DR/DME/DME组合满足RNAV 0.1运行,DR/VOR/DME组合支持RNAV 0.3。
区域导航,陆基无线电导航,测距机,甚高频全向信标,航位推算
0 引言
随着民航业的迅猛发展,传统的陆基系统导航模式由于对地面导航台的过度依赖而越来越成为民航运输发展的瓶颈。在此契机下,为满足民航空中流量增加、经济高效和安全飞行的要求。国际民航组织(ICAO)提出了基于性能导航(PBN)方案[1],中国民航航空局(CAAC)已制定了完整的区域导航(RNAV)运行标准和规章体系[2],大力发展RNAV。RNAV可以使航空器在导航系统信号覆盖范围之内,或在机载导航设备的工作能力范围之内,或二者的组合,沿任意期望的路径飞行。与传统导航技术相比,RNAV导航更为精确,并提高了飞行的安全水平[3]。
为满足RNAV运行需求,国外知名的飞机制造商(如波音和空客公司)研制的大型民用飞机采用IRS(惯性参考系统)、GPS(全球定位系统)、DME(测距机)、VOR(甚高频全向信标)等多传感器进行融合的方式实现精确导航,但是其具体实现方式的资料甚少[4-6]。国内在传统陆基无线电定位方面进行了研究[7],这种导航方式精度较差,难以满足终端区进近阶段的区域导航的需求(如RNAV 0.3或RNAV 0.1)。国内在惯导、GPS、无线电等多传感器组合算法等方面进行了大量的研究[8-9],这些组合导航方式不仅需要配备价格昂贵的惯性导航系统,并且模型和组合算法复杂。
航位推算系统(DR)是利用机载已有的航向、速度、姿态等传感器数据进行推算的自主导航定位系统,具有自主性好、抗干扰性强、短时间精度较高、成本低等优点,但系统误差随时间积累。为此,本文使用DR系统代替惯导系统作为组合导航系统的基本系统,并采用DME、VOR陆基无线电导航作为辅助系统,设计基于DR/陆基无线电导航的区域导航方法,实现飞机位置的精确估计,满足区域导航运行要求。
1 陆基无线电导航定位误差建模
1.1 DME/DME定位误差模型
DME系统是民用飞机必备的区域导航设备,DME/DME定位原理为:利用DME接收机测出飞机相对两个DME导航台i(i=1,2)的斜距,计算出与飞机地面点到地面台的圆弧距,根据导航数据库内存储的地面台位置信息,即可计算出飞机位置[10]。设飞机的位置为P(L,λ,R+h),飞机的地面位置为P′(L,λ,R),DME台D1的位置为D1′(L1,λ1,R+h1),D1地面位置为D1′(L1,λ1,R),其中L、λ、h分别是飞机的纬度、经度和高度,L1、λ1、h1分别是台 D1的纬度、经度和高度,R是地球半径,DME台斜距为ρ1,地面位置P′和D1′之间的圆弧距为S1,设点P和点D1处地垂线方向的单位向量分别为u和u1,如图1所示。
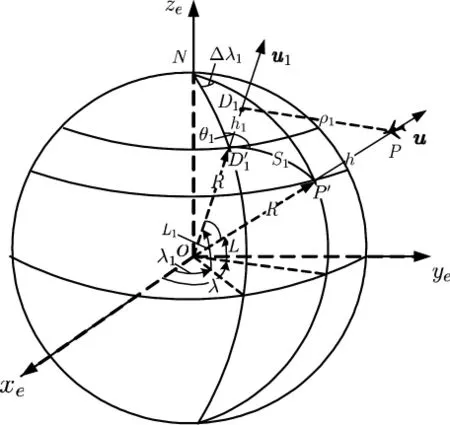
图1 DME导航台和飞机球面关系
同理,若导航台2的位置为D2(L2,λ2,R+h2),测得的飞机斜距为ρ2,则

所以式(2)和式(3)即为DME/DME定位方程。

图2 飞机与导航台在地球表面的球面三角关系
设飞机位置计算出相对DME导航台的计算斜距ρCi,将其与DME测量斜距ρDi作差:

将图1中ND1′P′组成的球面三角形绘为图2,根据球面三角性几何关系得:

根据式(2)~式(6)整理得到斜距误差模型为:

其 中Si是斜距ρDi对 应 的 弧 长 ,为DME测量噪声
1.2 VOR/DME定位误差模型
VOR/DME定位原理:利用VOR接收机测出的飞机相对地面台的方位角和DME接收机测出的相对某地面台的斜距,计算出飞机相应的地面点到地面台的距离,同样根据导航数据库存储的地面台位置信息,即可计算出飞机位置。设VOR台位置为D1(L1,λ1,R+h1),导航台地面位置为D1′(L1,λ1,R),飞机的位置为 P(L,λ,R+h),飞机的地面位置为 P1′(L,λ,R),θ为飞机相对地面台 D1北向的偏角,规定北偏东为正,ρ为DME测量的斜距,如下页图3所示。

图3 飞机和VOR导航台间的方位关系
由图3可以看出,θ为平面D1OP和平面NOD1间的夹角,两平面的夹角也可表示为两平面法线间的夹角。为平面NOD1的法线单位向量,为平面D1OP的法线单位向量,则θ可表示为法线和间夹角,即

上式转换为:


所以式(2)和式(9)为VOR/DME定位方程。
设飞机位置计算出相对VOR导航台的计算方位角θC1,将其与VOR测量斜距θD1作差:

由图3得到球面三角形关系:

再根据式(9)~式(13)整理得到方位角误差模型为:

其中 vδθ1为 VOR 测量噪声。
2 基于DR/陆基无线电的区域导航方法设计
2.1 系统误差状态模型
航位推算法导航本身是一种准自主式导航方法,它利用机上传感器所给的航向角及空速信息以及风速、风向信息确定出飞机相对于地面的速度,再把飞机地速对时间进行连续积分推算出飞机当前位置。
基于航位推算误差模型,选取飞机的位置误差和速度误差作为状态量,即以地理系为基准,进而建立状态方程:

系统阵F为:

系统噪声矢量W为:

式中,δL、δλ 分别为纬度误差、经度误差;δVN、δVE分别为北向速度误差、东向速度误差;VE为DR系统的东向速度;L为DR系统的纬度;h为飞机高度;RN和RM为地球曲率半径;T为矩阵转置。
2.2 量测模型建立
2.2.1 DR/DME/DME量测模型
根据式DME斜距误差式(7),得到DME/DME量测方程为:

VDME为零均值的高斯白噪声。
2.2.2DR/VOR/DME量测模型
根据DME斜距误差式(7)和VOR方位角误差式(14),得到VOR/DME量测方程为:

3 仿真验证
本文利用搭建的仿真试验环境对设计的区域导航方法进行仿真试验分析。图4为在C环境下搭建的仿真模型平台,主要包括4个部分:飞行仿真器、导航传感器仿真系统、区域导航系统以及系统评估构成。其中,导航传感器仿真系统实现DR系统仿真并基于导航数据库进行DME和VOR接收机的仿真,系统评估模块对实际导航误差和实际导航性能(ANP)进行实时评估。民用飞机机载DME接收机通常具有3个通道,通道1和VOR配对完成VOR/DME定位,通道2和通道3配对完成DME/DME定位。

图4 仿真试验环境结构图
3.1 仿真条件
仿真过程中,从航路图上提取了上海虹桥机场(ZSSS)到北京首都机场(ZBAA)的RNAV航路进行了仿真实验。飞行仿真轨迹水平位置曲线及航路中附近的无线电台站分布示意图如图5所示。其中,航路点用蓝色“☆”标识,无线电站台用红色“△”标识。

图5 飞行轨迹水平位置曲线及航路中无线电站台分布示意图
在传感器仿真过程中根据RTCA DO-236B标准中对导航传感器精度要求[11],添加相应的测量误差。其中,在DR仿真过程中,航向误差为0.1°,地速误差为2 m/s;DME斜距误差为0.1 n mile;VOR方位角误差为1°。
3.2 仿真结果分析

图6 DR/DME/DME组合导航位置误差曲线
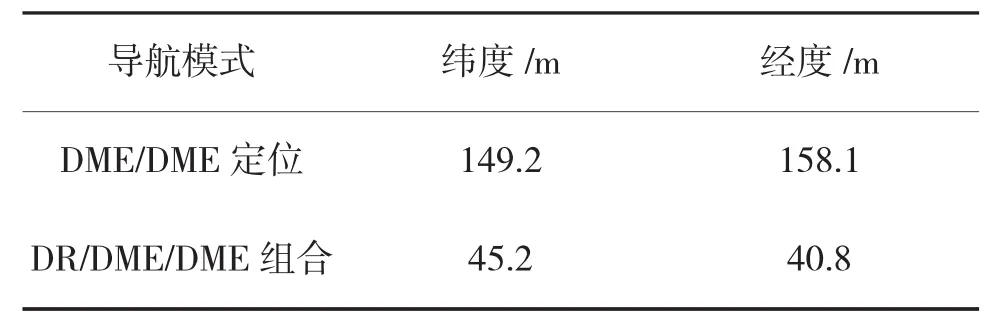
表1DR/DME/DME位置均方差
图6为DR/DME/DME组合导航输出的经度误差、纬度误差对比曲线,表1为DR/DME/DME组合导航前后位置误差均方差。从图6和表1可以看出,DR/DME/DME组合导航(简称DR/D/D组合))输出的位置噪声明显低于通过DME测量斜距直接解算的DME/DME定位(简称D/D)位置噪声,组合导航对无线电位置的测量噪声进行有效抑制。
本文采用RTCA DO-236B中推荐的实际导航性能分析方法对D/D定位结果性能进行评估,并采用文献[12]中设计的基于组合导航协方差阵的ANP估计方法对DR/D/D性能进行评估,其中ANP表示位置计算结果的95%的精确度性能[13],下页图7为DR/DME/DME组合导航前后实际导航性能曲线。可以看出,采用D/D定位的导航性能受导航台空间几何布局、距离、导航台切换等因素的影响,ANP抖动较大,仅能满足RNAV 1.0运行,而采用DR/D/D组合导航方式的导航性能明显得到提高,除了在 2 100 s、3 400 s、4 400 s附近不存在合适导航台,组合导航为纯DR模式导致ANP>0.1NM,因此,在正常DR/D/D组合导航模式时间内ANP值变化平稳,能够满足RNAV 0.1运行。

图7 DR/DME/DME组合导航实际导航性能曲线
下页图8为DR/VOR/DME组合导航输出的经度误差、纬度误差对比曲线,下页表2为DR/VOR/DME组合导航前后位置误差均方差。从图8和表2可以看出,DR/VOR/DME组合导航(简称DR/V/D组合))输出的位置噪声明显低于通过DME斜距和VOR方位角直接解算的VOR/DME(简称V/D)位置噪声,组合导航对无线电位置的测量噪声进行有效抑制。图9为DR/VOR/DME组合导航前后实际导航性能曲线。可以看出,采用V/D定位的导航性能受飞机到导航台距离、导航台切换等因素的影响,ANP抖动较大,仅能满足RNAV 2.0运行,而采用DR/V/D组合导航方式的导航性能明显得到提高,正常DR/V/D组合导航模式下ANP值变化平稳,除了在1 400 s不存在V/D导航台切换为DR模式外,其他时间内能够满足RNAV 0.3运行。
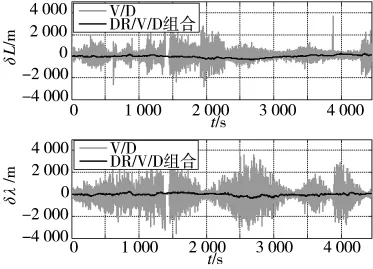
图8 DR/VOR/DME组合导航位置误差曲线

表2DR/VOR/DME位置均方差

图9 DR/VOR/DME组合导航实际导航性能曲线
4 结论
区域导航系统为飞机飞行过程提供一种更加精确、安全、可靠的条件。本文建立了陆基无线电导航定位的误差模型,在此基础上搭建了基于DR/DME/DME组合和DR/VOR/DME组合的导航模型,最后采用上海虹桥机场到北京首都机场的RNAV航路进行了仿真验证,结果表明,本文设计的基于DR/陆基无线电导航的区域导航系统能够实现位置的精确估计,DR/DME/DME组合满足RNAV 0.1运行DR/VOR/DME组合支持RNAV 0.3,是一种简单、切实有效的方法。
[1]ICAO Doc 9613-AN/937.Performance based navigation(PBN) manual[Z].(4th Edition)Montreal:International Civil Aviation Organization,2013.
[2]中国民航航空局.中国民航基于性能的导航实施路线图[Z].1.0版,北京:中国民航航空局,2009.
[3]Advisory Circular 90-100A.Terminal and en route area navigation(RNAV)operations[S].Federal Aviation Administration,US,2007.
[4]ALBERT A,MICHAEL C,TOMMY N,et al.Analysis of advanced flight management systems (FMS),flight management computer(FMC)field observations trials:area navigation(RNAV)holding patterns[C]//IEEE.30th IEEE Digital Avionics Systems Conference ,2011:1-17.
[5]Flight crew operation manual of FMC equipped 737[Z].Seattle:Boeing Company,2011.
[6]A319/A320/A321 Flight crew operation manual[Z].AIRBUS Company,2010.
[7]李晓东,赵修斌,王啸.用塔康系统的区域导航定位算法[J].电光与控制,2012,19(12):84-88.
[8]马燕玲,赖际舟,吕品,等.一种基于时变噪声的惯性/陆基无线电导航系统信息融合方法[J].电子测量技术,2013,36(3):40-43.
[9]李正强,王宏力,杨益强,等.INS/GPS无线电近程导航系统[J].中国惯性技术学报,2004,12(5):40-42.
[10]袁信,俞济祥.导航系统[M].北京.航空工业出版社,1993:116-117.
[11]RTCA DO-236,Minimum aviation system performance standards[S].Washington D C:RTCA Inc,2003.
[12]孙淑光,戴博,张鹏.机载组合导航系统实际导航性能计算方法[J].控制工程,2011,18(2):262-266.
[13]BALLIN M G,WILLIAMS D H,ALLEN B D,et al.Prototype flight management capabilities to explore temporal rnp concepts[C]//IEEE.27th IEEE Digital Avionics Systems Conference.Saint Paul:IEEE ,2008:26-23.
RNAV Method Based on DR/Land-based Radio Navigation
MA Hang-shuai1,2,WANG Dan1,2,SUN Xiao-min1,2
(1.Key Laboratory of Science and Technology on Avionics Integration Technologies,Shanghai 200233,China;2.China National Aeronautical Radio Electronics Research Institute,Shanghai 200233,China)
In order to improve the performance of RNAV,an RNAV method based on DR/landbased radio navigation is proposed.The error model of distance and azimuth are established by considering the theory of based radio navigation.Then,integrated model of RNAV based on DR/landbased radio navigation is designed.Based on the information RNAV airways in the area of ZSSS and ZBAA,some simulation experiments are performed.Simulation result indicates that the RNAV can estimate the position accurately,DR/DME/DME mode can satisfy the requirement of RNAV 0.1,DR/VOR/DME mode can satisfy RNAV 0.3.
RNAV,land-based radio navigation,DME,VOR,dead reckoning
1002-0640(2017)10-0162-05
V249
A
10.3969/j.issn.1002-0640.2017.10.034
2016-09-05
2016-10-17
马航帅(1986- ),男,河南滑县人,硕士研究生,工程师。研究方向:多传感器导航、飞行管理系统设计与开发。