双断根嫁接机自动搬运与回栽装置设计与试验
2017-11-15童俊华喻擎苍泮金辉杨太玮丁煜华
童俊华 喻擎苍 泮金辉 杨太玮 丁煜华
(1.浙江理工大学机械与自动控制学院,杭州 310018; 2.浙江省种植装备技术重点实验室,杭州 310018)
双断根嫁接机自动搬运与回栽装置设计与试验
童俊华1,2喻擎苍1,2泮金辉1杨太玮1丁煜华1
(1.浙江理工大学机械与自动控制学院,杭州 310018; 2.浙江省种植装备技术重点实验室,杭州 310018)
为提高嫁接流程的自动化程度,设计了一种适用于双断根嫁接机的自动搬运及回栽装置,以解决嫁接后嫁接苗依靠人工搬运、回栽作业的问题。阐述了搬运及回栽装置工作原理,并对关键机构进行了仿真和运动学分析。通过嫁接苗贴接夹紧区域统计和嫁接苗搬运试验,确定搬运机构对嫁接苗的最佳夹持位置;当机构夹持嫁接苗夹子下端搬运,搬运成功率可达94%,平均耗时为2.5 s/株。通过镇压三因素三水平正交试验,确定嫁接苗镇压效果最优条件;当打孔孔径10 mm、打孔深度15 mm、镇压块形状为对分锥面镇压时,嫁接苗回栽试验成功率可达92%,平均耗时为4 s/株,满足目前全自动嫁接机的嫁接速度要求。试验表明,设计的嫁接苗自动搬运及回栽装置与嫁接机配套使用,可提高嫁接流程的自动化程度。
双断根嫁接机; 搬运; 回栽; 镇压; 夹持
引言
双断根嫁接法[1-3]是近年来新出现的嫁接方式,区别于传统的嫁接方法,它将砧木和接穗的原有根系均去除,诱导嫁接苗产生新的根系[4-5]。双断根嫁接与常规插接方法相比人均嫁接速率、嫁接功效、嫁接成活率分别提高32%、46.8%、8%,对于商品化、工厂化育苗具有较大的推进作用[6-8]。
目前,嫁接过程中切削自动化已经普遍实现,自动取苗、供苗、嫁接苗自动栽植、后期管理等操作过程的自动化正得到更多的研究关注[9]。2011年,日本井关公司设计的GRF800-U型全自动嫁接装置已经可以自动切断根部实现双断根嫁接[10]。2010年,辜松等[11]、楼建忠等[12]提出的2JX-M系列气力蔬菜嫁接切削器可对砧木和接穗进行自动切削作业,提升了断根嫁接的自动化程度。2012年,ZHANG等[13-14]提出一种适用于贴接法嫁接机的自动上苗装置,该装置也可以在嫁接前对砧木和接穗进行自动断根处理。2014年,张铁中团队[15-16]提出单人操作的蔬菜嫁接机,该机器可以根据需要对嫁接苗进行断根和留根嫁接。为了提升双断根嫁接的自动化程度,国内外很多团队已经研制出具有断根切削功能的切削器和上苗装置[17-19],部分嫁接机器人也已经实现自动双断根嫁接[20],但嫁接完成后嫁接苗的搬运、回栽目前依然以人工为主。
为进一步提高嫁接流程的自动化程度,减少人工辅助强度,本文拟设计一种可以和双断根嫁接机配套使用的自动搬运与回栽装置,并对其可行性和最佳使用条件进行试验验证。
1 搬运回栽装置工作流程
双断根嫁接苗自动搬运及回栽装置分为搬运机构和回栽机构两部分,如图1所示,该装置可直接与嫁接机对接安装。
当嫁接苗在嫁接台处完成双断根嫁接后,嫁接苗搬运机构将嫁接苗夹持,并搬运至嫁接苗回栽机构处;嫁接苗回栽机构夹取嫁接苗后移动到相应的穴盘上方,之后由回栽机构对穴孔基质打孔并将嫁接苗插入基质中镇压,完成对嫁接苗的回栽作业。
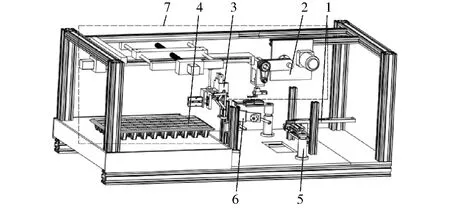
图1 嫁接苗自动搬运及回栽装置结构示意图Fig.1 Structural diagram of automatic carrying and replanting device for grafting1.嫁接机嫁接台 2.搬运机构 3.回栽机构 4.嫁接苗回栽穴盘 5.嫁接机夹持苗机构 6.嫁接机切削机构 7.搬运及回栽区域
2 关键机构设计与工作原理
2.1 嫁接苗夹持与搬运机构
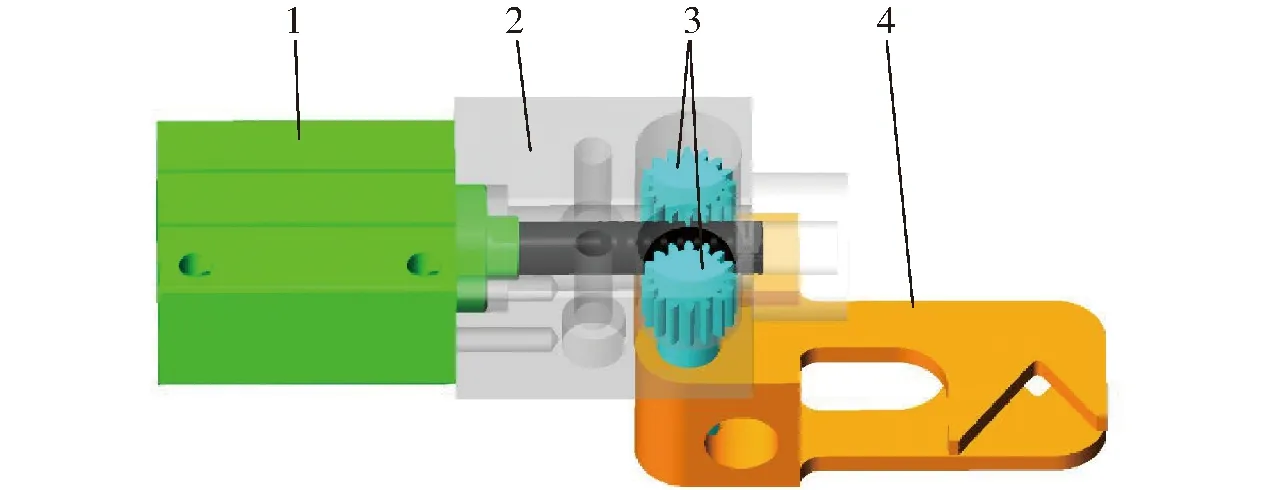
图2 夹持机构Fig.2 Clamping mechanism1.直线气缸 2.齿条 3.小齿轮 4.夹爪
夹持机构对嫁接苗的夹持可靠性会影响搬运的成功率。如图2所示,本文设计的夹持机构主要由夹爪、直线气缸、齿条和小齿轮组成。该机构的主要工作原理为:直线气缸带动齿条前后运动,齿条两侧有2个相应的小齿轮与其相啮合,小齿轮另一端与夹持机构的夹爪相固定。在气缸推动齿条前后运动时,齿轮带动夹爪完成张开和收拢动作。
嫁接夹持机构的夹爪为上下两层交错,两层前端的开口为“V”字形,有利于夹持机构拢苗,减少对嫁接苗的损伤。嫁接苗苗径大约为3 mm,夹持机构夹爪在收拢之后会形成一个4.5 mm左右的孔径,同时会在夹爪“V”字形端口表面粘贴弹性EVA 软质垫片,避免夹持过程中对嫁接苗茎秆造成伤害。
由图1可知,嫁接苗搬运机构将嫁接苗从嫁接台搬运至回栽机构处需要越过切削机构。同时为了便于回栽机构夹持,搬运机构搬运过程中要始终保持竖直状态,同时夹持机构在搬运过程中水平方向上需要转向180°。
嫁接苗搬运机构的工作原理为:当同步带轮绕着一个固定的同步带轮转动时,它会绕着固定同步带轮公转而无自转。图3中与公转同步带轮固定的支架、第3转轴和第4转轴始终保持竖直向下状态。如图4所示,本方案的工作过程为:① 初始状态,夹持机构夹取嫁接台处的嫁接苗。② 电动机通过第1同步带轮组带动转动臂旋转90°,同时第3转轴始终绕着第2转轴公转而无自转。③ 第4转轴上的旋转同步带轮受到固定在转臂的固定同步带轮影响而自转,利用锥齿轮传动从而使第5转轴转动180°,嫁接苗搬运至回载机构处。④ 夹持机构松开嫁接苗后,夹持机构回到原来位置,再进行与步骤①~③相同的下一次循环,如图3往复循环,自动搬运嫁接苗。
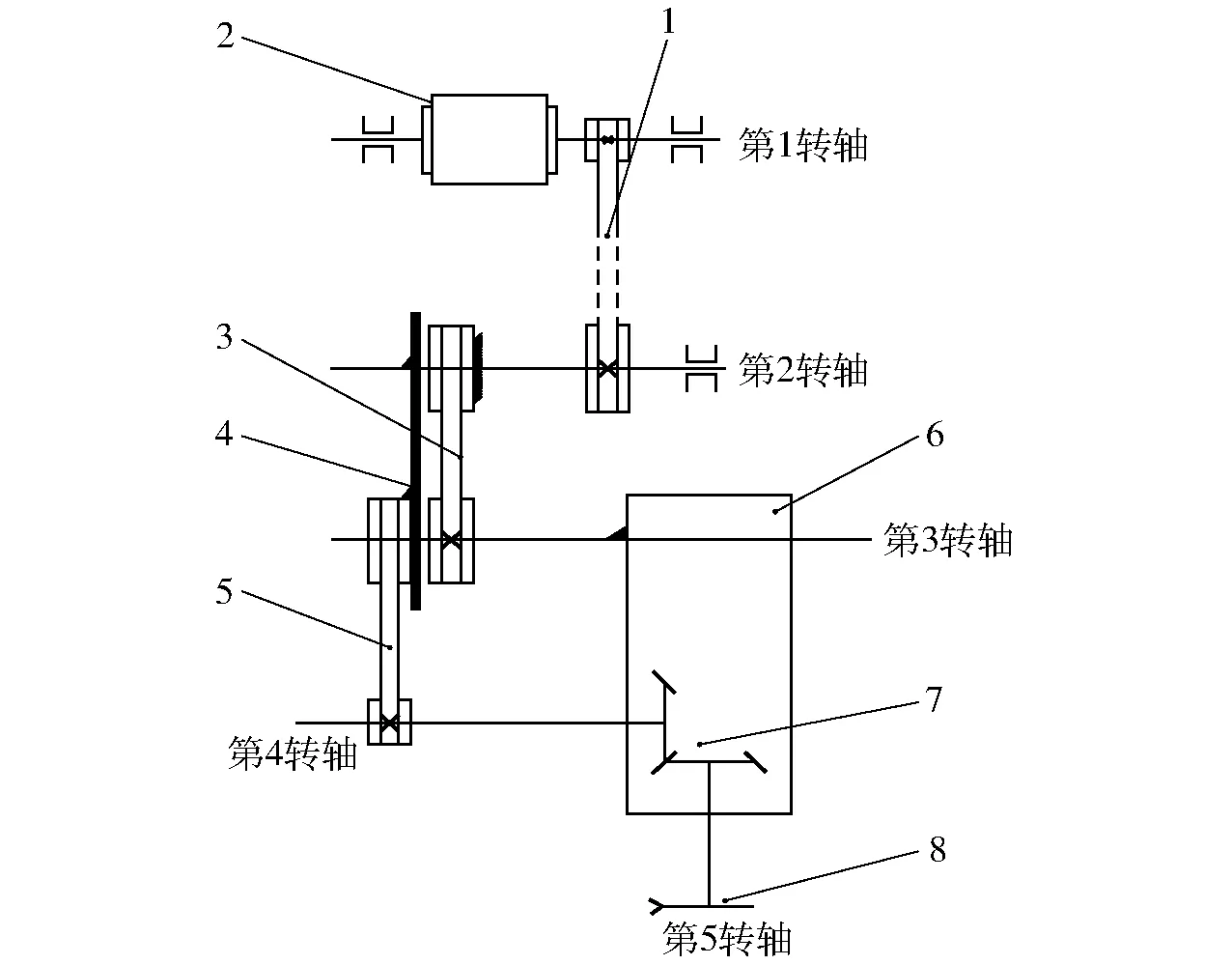
图3 搬运机构结构示意图Fig.3 Structural diagram of automatic carrying mechanism1.第1同步带轮组 2.电动机 3.第2同步带轮组 4.转臂 5.第3同步带轮组 6.固定支架 7.锥齿轮组 8.夹持机构
嫁接苗搬运机构中固定支架是唯一的,旋转臂臂长可以调节,通过更换旋转臂可以实现在不同高度的嫁接机嫁接台上旋转搬运嫁接苗。
2.2 嫁接苗回栽机构
2.2.1回栽机构工作原理
根据农艺要求可知,回栽装置需要实现嫁接苗夹取、基质打孔、嫁接苗回栽以及基质镇压功能。
图5所示为双驱动多连杆机构结构简图,该装置主要由持苗打孔机构和镇压机构共同组成,通过水平气缸和竖直气缸一起驱动双驱动多连杆机构来实现嫁接苗的回栽。Fa代表了水平方向上的双轴气缸产生的水平方向动力,Fb代表了竖直方向上的双轴气缸产生的竖直方向动力,其具体的工作步骤如下:
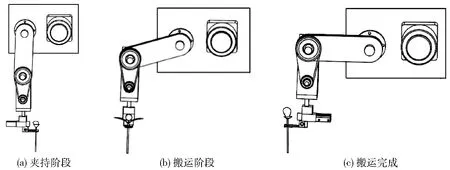
图4 自动搬运机构工作示意图Fig.4 Working process of automatic handling mechanism
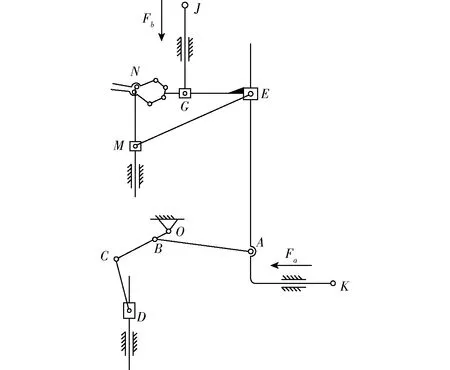
图5 双驱动多连杆机构结构简图Fig.5 Structural diagram of dual drive multilink mechanism
(1)当夹持机构N保持闭合状态后,竖直方向上的力Fb向下移动,除了带动夹持机构N和与其固定的滑块E向下移动,同时带动打孔滑块M和固定滑块上的打孔杆向下移动,完成打孔动作。
(2)水平方向动力Fa往后移动,带动弯曲连杆EAK沿槽进行水平方向的移动,滑块E跟随着连杆EAK移动使得夹持机构变成张开状态,同时打孔滑块M向上移动,收回打孔杆。弯曲连杆EAK往后运动通过连杆BA带动连杆CO旋转。与连杆CO相连的连杆CD受到影响带动滑块D往下运动到最低点完成对基质的镇压。之后弯曲连杆EAK继续向后运动,滑块D开始往上移动离开基质。
(3)竖直方向力Fb通过连杆JG带动夹持机构等往上移动。离开穴盘后,水平方向力Fa往前推动弯曲连杆EAK向前运动,使得夹持机构保持闭合状态,完成对新的嫁接苗的夹持,开始下一个循环动作。
2.2.2镇压和打孔机构运动学分析
双驱动多连杆机构中水平气缸和竖直气缸产生的量程是不变的,但其驱动的镇压机构的镇压速度过快容易损伤嫁接苗。本节通过对镇压机构运动学分析,确定机构关键尺寸参数的合理性。
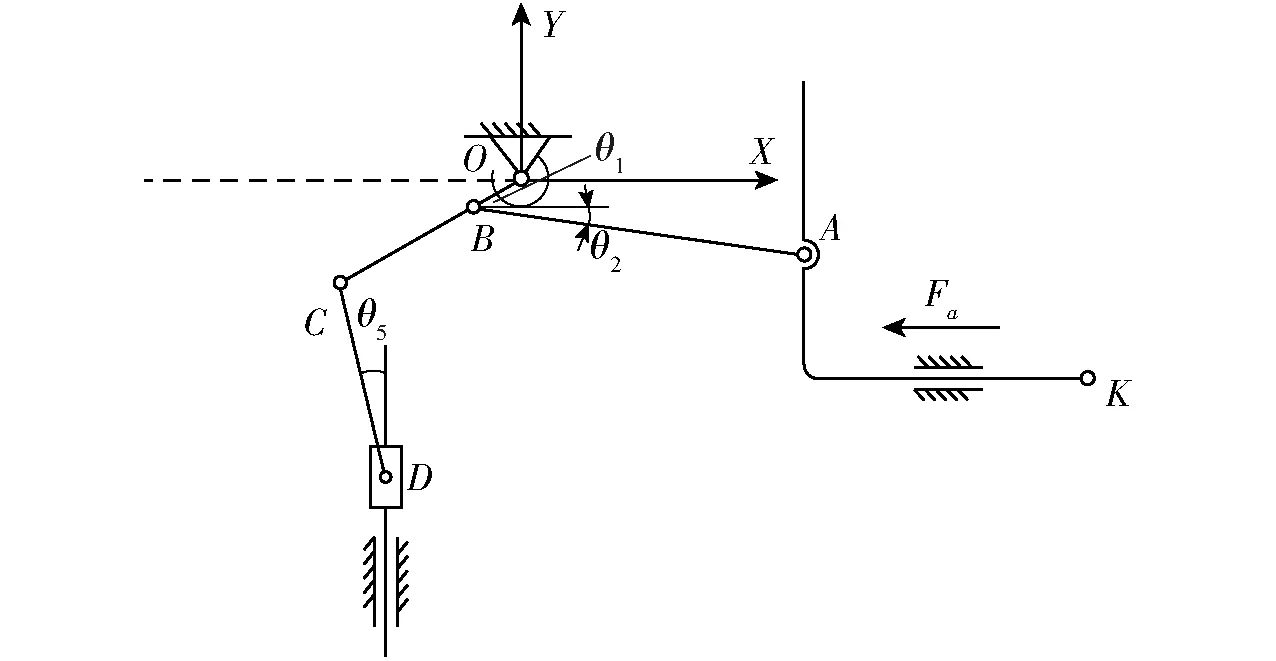
图6 镇压机构结构简图Fig.6 Structural diagram of pressing mechanism
首先建立位移方程,由图6建立机构的矢量方程
lOB+lBA=lOA
(1)
将矢量方程转化成解析形式,分别为
(2)
(3)
式中θ1——连杆BO和X轴的夹角
θ2——连杆BA和X轴的夹角
由上述方程组求解,可得
(4)
(5)
建立速度方程,并对方程组(2)、(3)求一阶导数得
(6)
(7)
联立式(6)、(7),求解可得

(8)
(9)
式中θ′1——连杆BO的角速度
θ′2——连杆BA的角速度
已知弯曲连杆AK的速度,可得连杆OC的角速度,可进一步计算得到镇压块D的速度和加速度,为下一步优化做准备。
首先建立位移方程,建立机构的矢量方程
lOC+lCD=lOD
(10)
将矢量方程转化成解析形式,分别为
(11)
(12)
式中θ4——连杆OC和Y轴的夹角
θ5——连杆CD和Y轴的夹角
由上述方程组求解,可得
(13)
(14)
建立速度方程,对方程组(11)、(12)求一阶导数,得
(15)
(16)
求解可得
(17)
Y′D=θ′4lCOcosθ4-θ′5lCDsinθ5
(18)
式中θ′5——连杆CD的角速度
Y′D——滑块D的速度
得到在Fa和X′A作用下,相关连杆的速度及各连杆的极限位置。现各关键连杆具体参数为:lCD=60 mm、lEM=65 mm、lCO=50 mm,取X′A为300 mm/s,代入到上述计算公式中,得到镇压块速度曲线。由图7可知,镇压滑块速度稳定在150~300 mm/s,镇压速度适中,不易对嫁接苗造成损伤[21]。
图7 镇压杆速度曲线Fig.7 Velocity curve of suppression link
不同种类嫁接苗适宜的打孔深度不同,打孔机构可以通过改变水平气缸量程d1和竖直气缸量程d2改变打孔深度,以适应不同深度要求。如图8所示,Fa驱动滑块E前移距离d1,打孔滑块M向下运动。然后Fb驱动带动打孔机构向下移动距离d2,打孔滑块M继续向下运动。
图8 打孔机构结构简图Fig.8 Structural diagram of drilling mechanism
打孔滑块M点的初始位置为
(19)
式中mY——滑块M与N点的竖直距离
滑块E到达左极限位置时,M点的位置为

(20)
连杆JG向下移动到最低点时,M点的位置为
(21)
根据双驱动多连杆机构的结构简图和关键杆件的参数,建立回栽机构的三维模型验证该机构的可行性,图9所示为回栽机构的工作示意图。
3 试验与分析
为确定自动搬运及回栽装置的可行性及适合的工作条件,分别对嫁接苗贴接夹紧区域进行统计及回栽镇压条件测试,然后在最佳工作条件下试验搬运及回栽装置的成功率和效率。试验中采用5×10规格的50孔穴盘育苗,穴盘基质由泥炭、蛭石、珍珠岩以3∶1∶1的体积比以及适量的水均匀混合制成,基质填满整个穴盘孔。试验用砧木为浙蒲二号葫芦苗,接穗为京欣王一号西瓜苗,砧木育苗时间要早于接穗4天,等砧木长到一叶一心以及接穗子叶平展时进行相关试验。
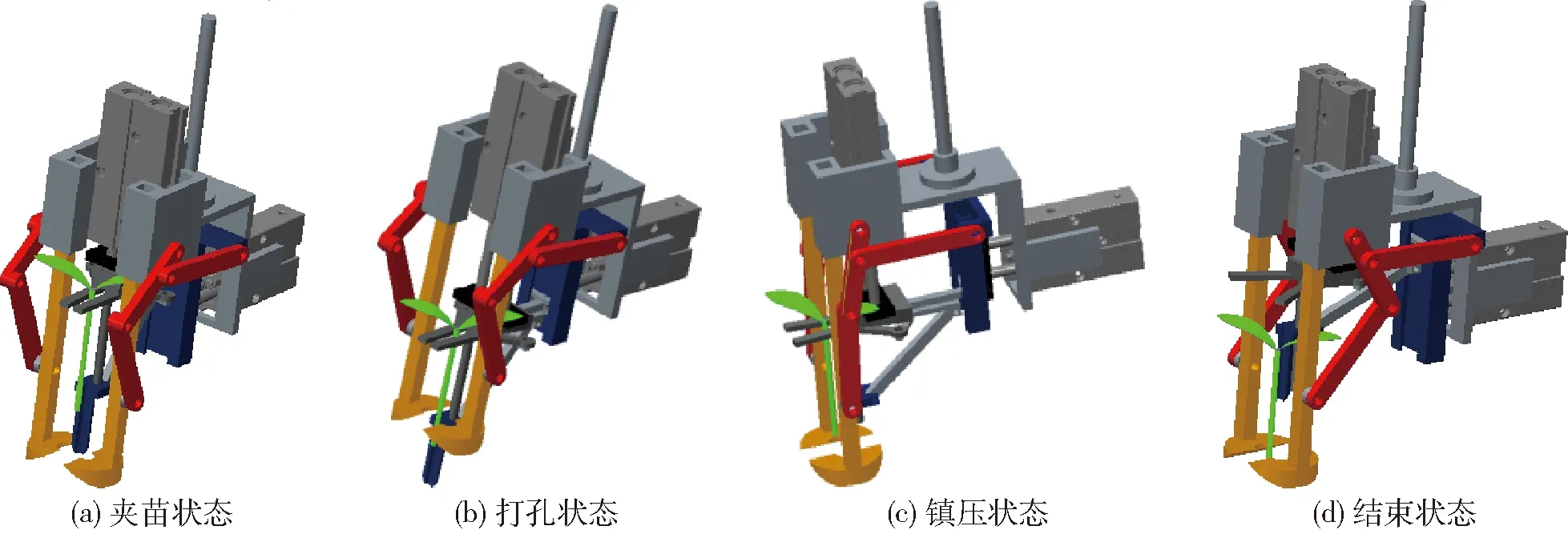
图9 自动回栽机构工作示意图Fig.9 Working process diagrams of automatic replanting mechanism
3.1 搬运机构夹持成功率测试
搬运机构中末端夹持件对不同贴接夹紧区域的夹持稳定程度不同,其最终影响搬运机构的搬运成功率。本节对嫁接苗嫁接夹贴接夹紧区域的分布进行统计,并通过搬运夹持试验分析对嫁接苗的最佳夹持位置。
嫁接苗嫁接时,夹持气缸松开嫁接夹子瞬间,夹子对嫁接苗贴接夹紧区域不可确定。图10所示为嫁接夹子对砧木和接穗的夹持图,图中O点为砧木和接穗的椭圆切面的中心点,O点在夹子中的位置代表了嫁接苗的夹持位置。
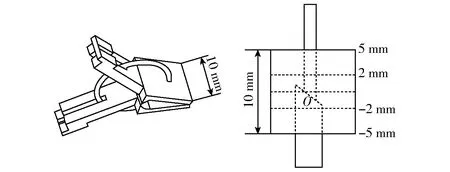
图10 贴接夹紧区域示意图Fig.10 Regional diagram of clamping area
因嫁接所用夹子高度为10 mm,图中以夹子中心线为坐标轴,根据嫁接时嫁接点O点所在区域划分出上、中、下3个夹持位置。
嫁接夹子对嫁接苗贴接夹紧区域统计选用嫁接机嫁接成功的100株嫁接苗,对每株嫁接苗中嫁接点O所在位置进行统计,具体结果如表1所示。
由贴接夹紧区域统计可知贴接夹紧区域主要以中间为主,但仍然有32%的嫁接苗为非中间区域贴接夹紧。为寻找嫁接苗的最适宜夹持位置,搬运机构采取嫁接夹上下两位置对3种贴接夹紧区域的嫁接苗进行夹持搬运试验,统计搬运成功率,如图11所示。其中,3种贴接夹紧区域的嫁接苗各50株,如图12所示,A、B为嫁接苗夹持点。
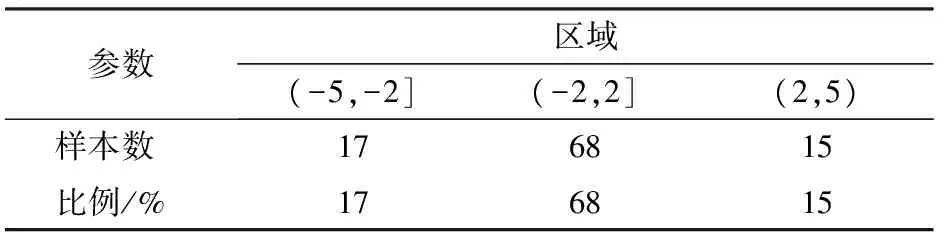
表1 贴接夹紧区域统计结果Tab.1 Experiment results of clamping area statistics

图11 嫁接苗自动搬运机构Fig.11 Automatic carrying mechanism
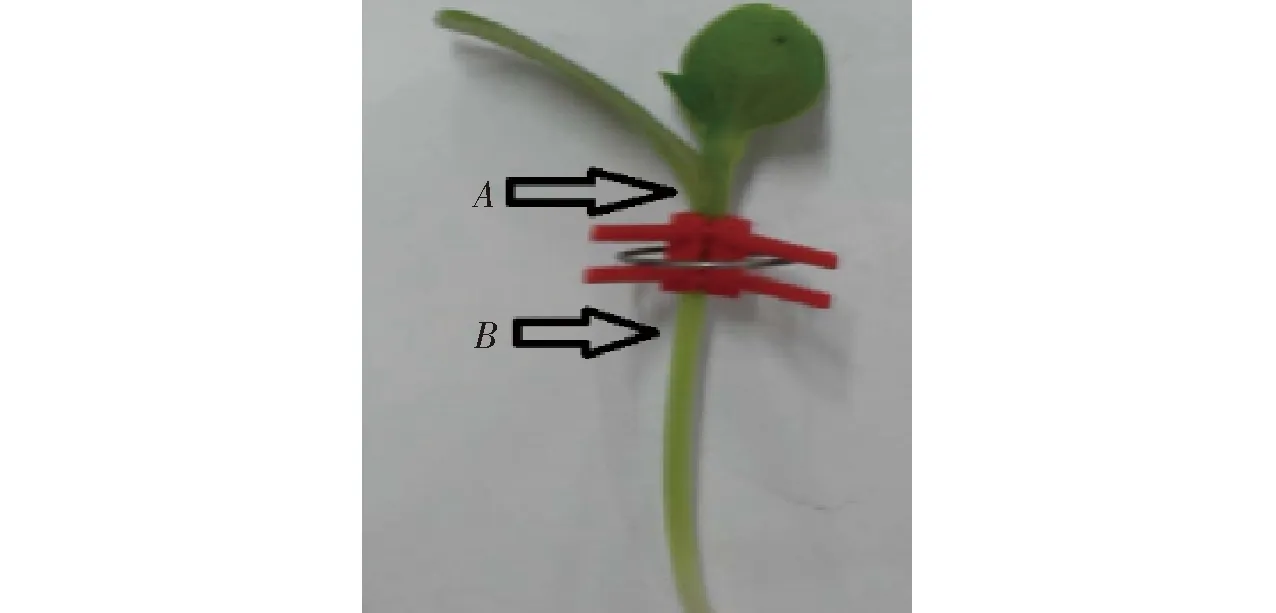
图12 嫁接苗实物Fig.12 Grafted seedlings
搬运试验为夹持机构夹持嫁接苗,旋转搬运嫁接苗至指定位置。其中夹持机构将分别夹持嫁接苗的A、B两点,通过试验记录分析哪种组合方式成功率最高。试验中嫁接苗搬运成功的指标为:嫁接苗搬运结束后依然保持直立状态,角度偏差小于15°;嫁接苗砧木茎秆没有受到挤压等损伤;嫁接苗的砧木和接穗依然被嫁接夹子牢固夹持没有出现松动或脱离情况。嫁接搬运试验结果统计如表2所示。
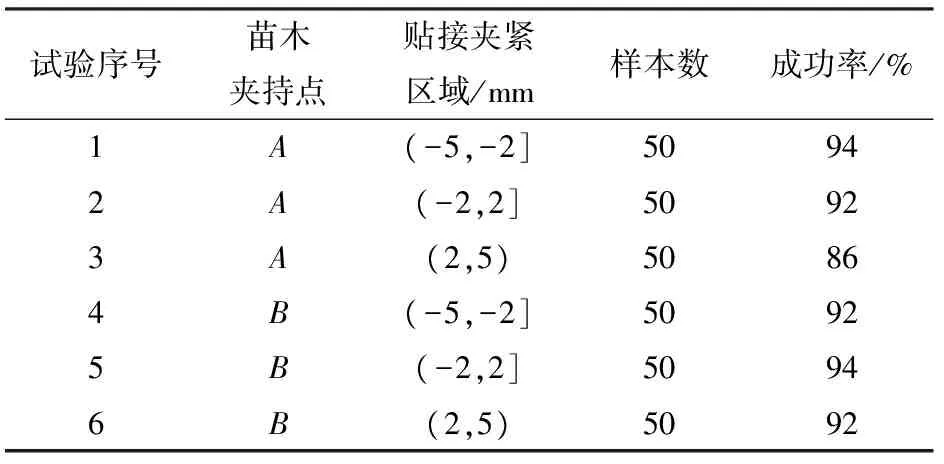
表2 搬运试验结果Tab.2 Success rate of seedling carrying
试验结果分析可知:
(1)对3种贴接夹紧区域的嫁接苗,夹持点位于B处时,成功率均大于92%。
(2)夹持点位于A处时,贴接夹紧区域位于(2,5)的嫁接苗成功率相对较低。
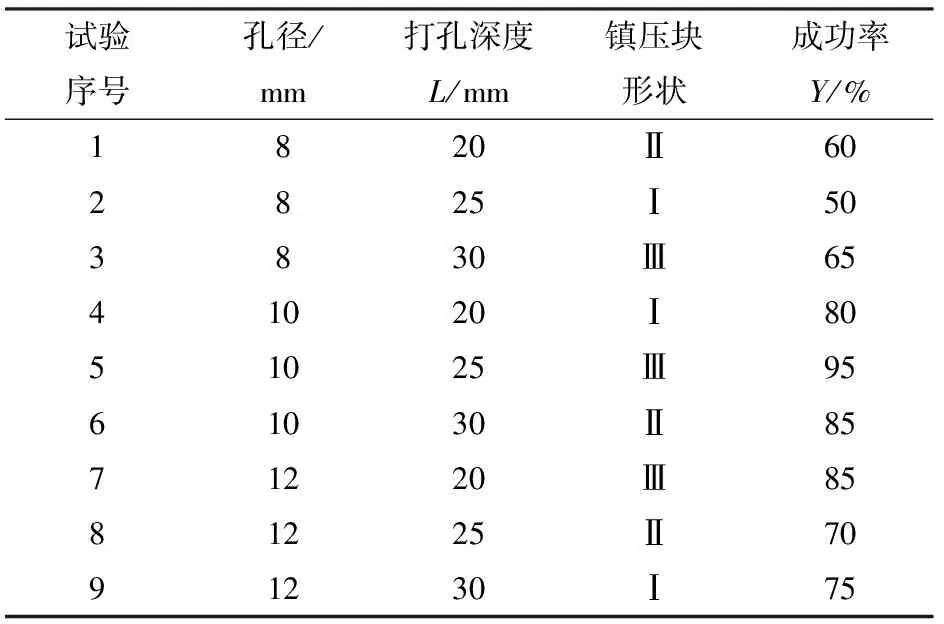
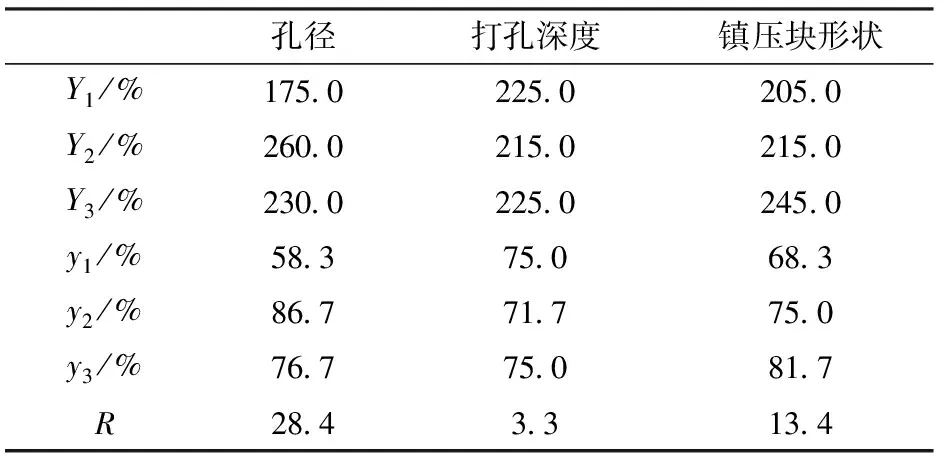
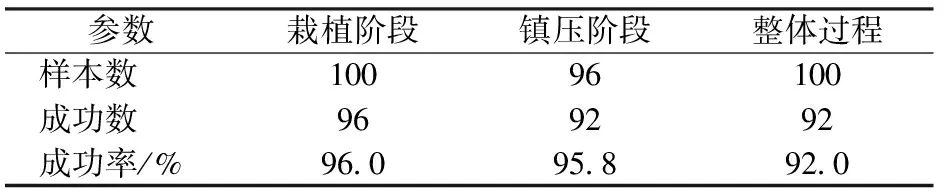
(3)采用A、B夹持点搬运总成功率为:各贴接夹紧区域占比例与表2中各区域搬运成功率乘积和,则P(A)=91.4%,P(B)=93.3%,P(A) 搬运机构转臂以30 r/min转速对150株双断根嫁接苗以B点夹持进行循环搬运试验,其成功率为94%,与上述统计结论相符。搬运试验平均耗时2.5 s/株,满足目前全自动嫁接机的7 s/株的嫁接速度要求。 3.2 镇压机构工作条件测试 嫁接苗回栽机构工作过程中基质打孔孔径、打孔深度以及镇压块形状会影响到镇压成功率。本测试通过正交试验将打孔孔径、打孔深度、镇压块形状作为设计因素,分析三因素对试验成功率的影响权重,得到镇压成功率最高的最优孔径、打孔深度和镇压块形状组合。 确定正交试验因素后,设计三因素三水平的正交试验。设计水平为: (1)根据西瓜双断根育苗要求,嫁接苗插入基质的深度在20~30 mm之间[22],将打孔深度L水平设计为20、25、30 mm。 (2)由于砧木杆轴径变化范围为2.5~3.5 mm,基质具有一定的松弛度,为了确保回栽以及镇压效果,将打孔孔径设计为8、10、12 mm 3个水平。 (3)设计了3种基质镇压块,分别为平面镇压块(Ⅰ型)、锥面镇压块(Ⅱ型)和对分锥面镇压块(Ⅲ型),如图13所示。 图13 3种镇压块镇压示意图Fig.13 Schematic diagram of three kinds of compaction blocks1.嫁接苗茎秆 2.镇压块 3.基质 试验具体操作为:育苗穴盘内填满65%湿度的基质,打孔机构按组次选用不同直径的光轴打孔,其后嫁接苗竖直插入基质并保持竖直状态;镇压块对基质镇压,镇压机构离开0.5 h后,观察嫁接苗镇压效果。 镇压成功的评价标准:嫁接苗栽植直立度较好,茎秆角度偏差不超过20°;嫁接苗回栽后拔起有明显的阻力感;嫁接苗茎秆没有受到明显损伤。根据测试要求,设计如表3所示的三因素三水平正交试验,选取嫁接苗180株,每组试验取20株个体进行试验,试验结果如表3所示。 按照正交试验分析法对结果分析,如表4所示。其中,Y1、Y2和Y3分别为3个因素在3个水平下的成功率之和;y1、y2和y3分别为Y1、Y2和Y3的平均值,R为极差。根据极差可确定影响镇压成功率的主要因素以及最佳因素水平组合。 通过极差R可知打孔孔径对试验成功率影响最大,镇压块形状次之,最后是打孔深度。当打孔孔径为10 mm,打孔深度为25 mm,镇压块为对分锥面镇压块半圆柱体(Ⅲ型)时,回栽镇压效果最好,镇压成功率最高为95%。 表3 镇压试验设计与结果Tab.3 Experiment design and results of seedling pressing 表4 镇压试验数据分析Tab.4 Data analysis of pressing experiment 3.3 回栽机构作业测试 在上述最佳镇压条件下,对回栽机构进行嫁接苗的回栽镇压整体试验。嫁接苗回栽过程包括栽植和镇压2个阶段。栽植阶段栽植成功判定标准为:夹持机构顺利夹持嫁接苗;嫁接苗成功插入基质;嫁接苗插入时直立度较好,茎秆角度偏差不超过20°;嫁接苗茎秆没有受到夹持、插入等造成的损伤。镇压阶段成功率判定标准与镇压试验相同。 回栽机构整体试验步骤为:嫁接苗置于搬运机构的夹持位置,竖直气缸驱动进行夹持、打孔、栽植作业,检验栽植成功率;水平气缸驱动进行镇压作业,检验镇压成功率。一次回栽镇压结束后将新的嫁接苗置于回栽机构上,同时育苗穴盘空穴孔再挪动一格进行循环试验。如图14,取100株嫁接苗按照设定步骤进行回栽镇压试验。 图14 嫁接苗回栽作业测试Fig.14 Automatic replanting test for grafted seedlings 经过不间断试验后,得出的试验结果如表5所示。 表5 嫁接苗回栽作业测试结果Tab.5 Replanting experiment results of grafted seedlings 试验结果可知,回栽阶段与镇压基质阶段成功率均在96%左右,回栽试验整体成功率为92%,成功率较高。试验失败的主要原因为少数砧木发育情况不好,导致嫁接苗的砧木茎秆弯曲度过大,嫁接苗插入基质时失败或者插入时候损伤茎秆。对嫁接苗连续回栽镇压测试,作业平均耗时4 s/株,满足全自动嫁接机的效率要求。 (1)针对目前采用双断根嫁接法的嫁接机,设计了一种嫁接苗自动搬运机构,可实现嫁接苗越过嫁接机切削装置连续提升、转向转运过程中保持竖直向下姿态不变的功能。 (2)设计了一种嫁接苗自动回栽装置,通过运动学分析其双驱动多连杆关键机构,使各杆长满足连杆工作时速度和加速度要求,其中LCD=60 mm、LEM=65 mm、LCO=50 mm符合要求。 (3)对嫁接苗贴接夹紧区域分布统计并进行搬运机构夹持试验,夹持嫁接夹下端位置时,嫁接苗自动搬运成功率可达94%,平均耗时2.5 s/株。 (4)通过正交试验分析影响嫁接苗镇压的因素,其中打孔孔径对成功率影响最大,打孔孔径为10 mm、镇压块为对分锥面形状、打孔深度为25 mm条件下嫁接苗镇压效果最好;回栽机构的回栽镇压整体成功率为92%,平均耗时4 s/株,满足目前全自动嫁接机的嫁接速度要求。 1 姜闯,张青,方伟,等.3种嫁接方法对黄瓜嫁接苗前期生长的影响[J].园艺与种苗,2011(6):4-6. JIANG Chuang, ZHANG Qing, FANG Wei, et al.Effects of three grafting methods on cucumber grafting seedings[J].Horticulture & Seed, 2011(6): 4-6.(in Chinese) 2 褚佳,张铁中,李军,等.断根嫁接苗自动栽植装置设计与试验[J/OL].农业机械学报,2016, 47(10):29-35.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20161004&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2016.10.004. CHU Jia, ZHANG Tiezhong, LI Jun, et al.Design and experiment of automatic planting device for root-cut grafted seedlings[J/OL].Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(10): 29-35.(in Chinese) 3 杨仕伟,李跃建,刘小俊.断根嫁接对黄瓜生理特性及产量的影响[J].长江蔬菜,2013(2):44-47. YANG Shiwei, LI Yuejian, LIU Xiaojun.Effects of root-cut-grafting on physiological characteristics and yield of cucumber[J].Journal of Changjiang Vegetables, 2013(2): 44-47.(in Chinese) 4 林欢,许林云.中国农业机器人发展及应用现状[J].浙江农业学报,2015,27(5):865-871. LIN Huan, XU Linyun.The development and prospect of agricultural robots in China[J].ACTA Agriculturae Zhejiangensis, 2015, 27(5): 865-871.(in Chinese) 5 LEE J, KUBOTA C, TSAO S J.Current status of vegetable grafting: diffusion, grafting techniques, automation[J].Scientia Horticulturae, 2010, 127(2): 93-105. 6 苏长跃.双断根嫁接对甜瓜生长发育及生理特性的影响[D].泰安:山东农业大学,2014. SU Changyue.Effects of both-root-cut grafting on growth,development and physiological characteristics of muskmelon[D].Taian:Shandong Agricultural University,2014.(in Chinese) 7 张雷,贺虎,武传宇.蔬菜嫁接机器人嫁接苗特征参数的视觉测量方法[J].农业工程学报,2015, 31(9):32-38. ZHANG Lei, HE Hu, WU Chuanyu.Vision method for measuring grafted seedling properties of vegetable grafted robot[J].Transactions of the Chinese Society of Agricultural Engineering, 2015, 31(9): 32-38.(in Chinese) 8 华斌.西瓜断根嫁接育苗技术优化研究[D].武汉:华中农业大学,2010. HUA Bin.Study on the optimized root-cut grafting technique of watermelon seedling nursery[D].Wuhan:Huazhong Agricultural University,2010.(in Chinese) 9 张凯良,褚佳,张铁中,等.蔬菜自动嫁接技术研究现状与发展分析[J/OL].农业机械学报,2017,48(3):1-13. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20170301&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2017.03.001. ZHANG Kailiang, CHU Jia, ZHANG Tiezhong, et al.Development status and analysis of automatic grafting technology for vegetables[J/OL].Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(3): 1-13.(in Chinese) 10 初麒,姜凯.2JC-600型自动嫁接机的试验研究[J].农机化研究,2011,33(1):183-186. CHU Qi, JIANG Kai.Experimental study on 2JC-600 automatic grafting machine[J].Journal of Agricultural Mechanization Research, 2011,33(1): 183-186.(in Chinese) 11 辜松,李恺,初麒,等.2JX-M系列蔬菜嫁接切削器作业试验[J].农业工程学报,2012, 28(10):27-32. GU Song, LI Kai, CHU Qi, et al.Experiment of 2JX-M series vegetable cutting devices for grafting[J].Transactions of the Chinese Society of Agricultural Engineering, 2012, 28(10): 27-32.(in Chinese) 12 楼建忠,李建平,朱盘安,等.斜插式蔬菜嫁接机砧木夹持机构研制与试验[J].农业工程学报,2013, 29(7):30-35. LOU Jianzhong, LI Jianping, ZHU Pan’an, et al.Design and test of stock clamping mechanism for vegetable grafting[J].Transactions of the Chinese Society of Agricultural Engineering, 2013, 29(7): 30-35.(in Chinese) 13 ZHANG Lu, WANG Zhelu, ZHANG Lei.Experimental study on an automatic graft robot for fruits and vegetables[J].Advanced Materials Research, 2011,186 (22): 79-83. 14 贺磊盈,蔡丽苑,武传宇.基于机器视觉的幼苗自动嫁接参数提取[J].农业工程学报,2013, 29(24):190-195. HE Leiying, CAI Liyuan, WU Chuanyu.Vision-based parameters extraction of seedlings for grafting robot[J].Transactions of the Chinese Society of Agricultural Engineering, 2013, 29(24): 190-195.(in Chinese) 15 褚佳,张铁中.葫芦科营养钵苗单人操作嫁接机器人设计与试验[J/OL].农业机械学报,2014,45(增刊):259-264.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=2014s142&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2014.S0.042. CHU Jia, ZHANG Tiezhong.Design and experiment of vegetable grafting robot operated by one-person for Cucurbitaceous seedlings cultivated in humus pots[J/OL].Transactions of the Chinese Society for Agricultural Machinery, 2014,45(Supp.): 259-264.(in Chinese) 16 褚佳,张铁中,张立博,等.套管式蔬菜自动嫁接机出套装置设计与试验[J/OL].农业机械学报,2016,47(2):64-70.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20160209&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2016.02.009. CHU Jia, ZHANG Tiezhong, ZHANG Libo, et al.Design and experiment of tube-outputting device for vegetable grafting machine using tube-grafting method[J/OL].Transactions of the Chinese Society for Agricultural Machinery, 2016,147(2): 64-70.(in Chinese) 17 CHEN S, CHIUY C, CHANG Y C.Development of a tubing-grafting robotic system for fruit-bearing vegetable seedlings[J].Applied Engineering in Agriculture, 2010, 26(4): 707-714. 18 周兴宇,辜松,姜凯.2JC-450型旋转嫁接机的研究[J].农机化研究,2009, 31(12):93-95. 19 XU Donglei, TIAN Subo.Current status of grafting robot for vegetable[J].International Conference on Electronic and Mechanical Engineering and Information Technology, 2011(4): 1954-1957. 20 杨丽,刘长青,张铁中.双臂蔬菜嫁接机设计与试验[J].农业机械学报,2010, 41(9):175-181. YANG Li, LIU Changqing, ZHANG Tiezhong.Design and experiment of vegetable grafting machine with double manipulators[J].Transactions of the Chinese Society for Agricultural Machinery, 2010, 41(9): 175-181.(in Chinese) 21 陈晨.蔬菜嫁接机上下苗末端执行器的设计与试验研究[D].杭州:浙江理工大学, 2015. CHEN Chen.Research on end effector of feeding and replanting seedling for grafting robot[D].Hangzhou: Zhejiang Sci-Tech University, 2015.(in Chinese) 22 崔凤有,辜松.蔬菜断根嫁接苗机械回栽技术[J].农机化研究,2007,29(4):220-221. DesignandExperimentofAutomaticCarryingandReplantingDeviceforBoth-root-cutGraftingMachine TONG Junhua1,2YU Qingcang1,2PAN Jinhui1YANG Taiwei1DING Yuhua1 (1.FacultyofMechanicalEngineeringandAutomation,ZhejiangSci-TechUniversity,Hangzhou310018,China2.KeyLaboratoryofTransplantingEquipmentandTechnologyofZhejiangProvince,Hangzhou310018,China) Both-root-cut grafting is a new method in seedlings grafting, which can result in a greater production in a longer harvesting period.In order to improve the automation level of grafting process, especially the current situation of grafted seedlings relying on manual carrying and artificial replanting, a mechanism of automatically carrying and replanting both-root-cut grafted seedlings was developed.The working principle of newly designed handling and replanting was introduced.The simulation and kinematic analysis of key mechanisms were carried out.Experiments of grafting seedling area statistics and automatic carrying seedlings were conducted in laboratory, the results showed that the success rate of carrying seedlings was up to 94% and the average time of carrying was 2.5 s, while the clamping mechanism was located at the lower end of the clip.Pressing experiment of three levels and three factors was designed to deal with the following conditions: the drilling hole diameter, the depth of punch and the suppression scheme of the grafted seedlings.While the hole diameter, the depth of drilling, and the pressing block was 10 mm, 15 mm, and a cylinder with lower surface separately, the effect of experiments was the best.Under this condition, the comprehensive success rate of grafted seedlings was up to 92%, and the average time of replanting was 2.5 s.The experimental results showed that the automatic carrying device and the replanting device can be well matched with the grafting machine.And they can improve the automation level of the grafting process. both-root-cut grafting machine; carrying; replanting; pressing; clamping 10.6041/j.issn.1000-1298.2017.10.007 S223.1; S616 A 1000-1298(2017)10-0059-08 2017-05-15 2017-07-22 国家自然科学基金项目(51375460)、杭州市农业科研攻关项目(20140432B15)和机械工程浙江省高校重中之重学科优秀青年人才培养基金项目(ZSTUME01B11) 童俊华(1984—),男,讲师,博士,主要从事设施农业装备技术研究,E-mail:jhtong@zstu.edu.cn 喻擎苍(1967—),男,教授,主要从事智能农业装备研究,E-mail:qcyu@zstu.edu.cn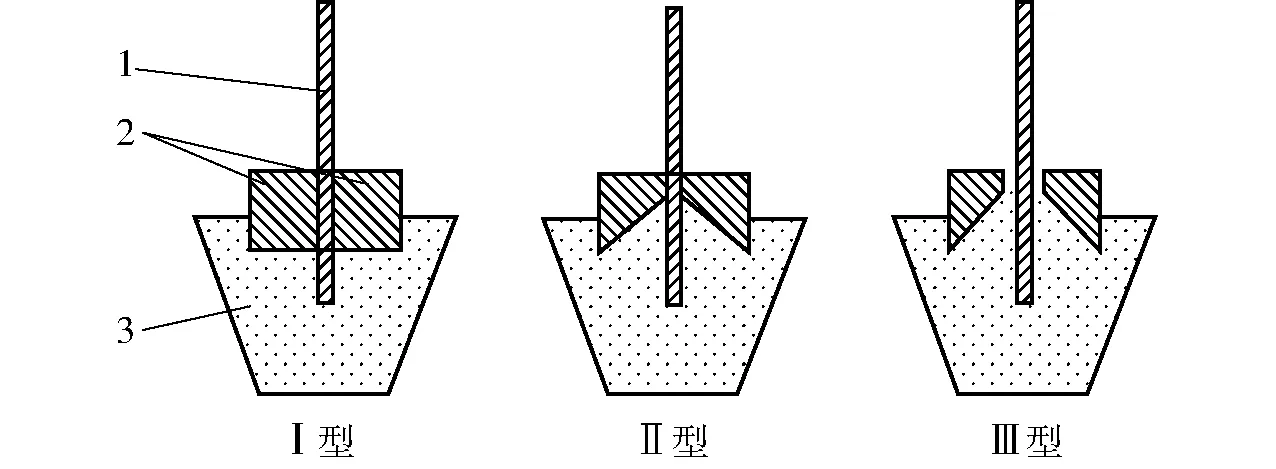

4 结论