无人机在东湖绿道二期应急测绘保障中关键技术研究
2017-11-14朱巧云乔炜李琼高雅冰
朱巧云,乔炜,李琼,高雅冰
(武汉市测绘研究院,湖北 武汉 430022)
无人机在东湖绿道二期应急测绘保障中关键技术研究
朱巧云*,乔炜,李琼,高雅冰
(武汉市测绘研究院,湖北 武汉 430022)
选择典型测区使用飞马F200无人机挂载SONY RX1RII黑卡相机进行大比例尺航空摄影,制定从无人机航摄、空三加密优化、无人机大比例尺立体测图精度分析、成果资料整理等一系列大比例尺无人机影像及航测成图的技术解决方案。研究了采用像素工厂对无人机遥感影像进行空三优化技术,利用无人机航测技术快速圆满地完成了东湖绿道二期规划设计应急测绘保障任务。
无人机;像素工厂;空三优化;应急测绘
1 引 言
东湖是中国最大的城中湖,武汉用绿道的形式把这一城市最大、最美的公共空间还之与民。东湖绿道一期已成功建成开放。为了突出显示城市名片功能,树立大东湖水系概念,打造东湖绿道二期,我院承担了东湖绿道二期工程范围内正射影像生产及局部重点区域1∶500地形图更新紧急测量任务。
东湖绿道二期比一期长一倍多,为了满足综合设计需求,本次测量范围不是普通带状,而是将整个东湖风景区纳入其中,测量的地形范围达 27.17 km2,加之测区位于严西湖、严东湖及森林公园等区域,湖岸曲折,港汊交错,湖泊、岛渚星罗棋布,地形复杂,人迹罕至,施测条件相当差。由于时间紧迫,任务繁重,我院采用最新飞马F200无人机挂载SONY RX1RII黑卡相机进行大比例尺航空摄影,图1为该范围内单幅无人机航空摄影影像图。从图面上看,影像质量良好,影像清晰,纹理清楚,影像的亮度、反差适中,现势性强,能够满足规划设计要求。

图1 单幅无人机航空摄影图
2 像素工程无人机影像空三处理原理
像素工厂是一套用于大型生产的遥感影像处理系统,该系统拥有很多个具有强大计算能力的计算结点,以海量数据的快速处理为突出优势。可以批量处理数码影像、卫星影像以及传统光学扫描后的数字影像,经过较少的人工干预,系统经过一系列自动化处理,输出DSM、DEM、DOM和TDOM等产品,而且能生成一系列中间产品。目前像素工厂在国内外已经成功被使用于各种项目之中。它以高性能集群并行计算机为核心处理平台,由若干个具有强大计算能力的计算机节点组成,为摄影测量与遥感数据处理提供了功能强大的平台[1~3]。
2.1光束法平差
无人机遥感影像获取系统一般是由小面阵高分辨率数码相机、高精度POS(GPS/IMU)定位定姿系统或者GPS定位辅助系统组成[4]。光束法平差的主要目的是确定地面点与影像点之间的连接。采用最小二乘法估算视图参数,输出精度与控制影像的精度、原始数据和GPS精度有关。
在像素工厂平台上处理无人机遥感影像时,以像点、初始外方位元素和DEM构建共线条件方程,实施基于物方匹配的连接点提取。在AOI确定点的分布,将所有点投影到对应的所有影像上,通过相关系数匹配确定同名点。利用密集的连接点构建自由网,通过反复迭代,粗差剔除,空三优化计算,形成稳健的自由网。
为了进行空三加密和精度检查,需要量测外业像控点和检查点,布设控制网可以按照区域网的形式进行布设,使用WHCORS+RTK测量得到像控点的平面坐标和高程坐标,形成像控点的控制网,为后一步的数据处理提供参照。同时,开始立体量测控制点,对测图精度进行计算。导入地面控制点进行判读量测,如图2所示,调整地面控制点GCP,更新每张影像上的控制点点位如图3所示,与自由网进行空三联合平差,分析点位的残差,使之符合成图精度。

图2 导入地面控制点

图3更新每张影像上的控制点点位
2.2对参数进行分组绑定优化
像素工厂对无人机影像数据进行空三优化时,依据优化参数的Sigma0值,可以分航带、分区域对优化参数进行分组绑定。采用最小二乘法优化,每个数据是由它的先验精度均衡的,值为0的精度意味着这些参数将变成一个恒量,不会被优化。像点坐标有一个指定精度,地面坐标根据其获取模式有一个绝对精度,取决于传感器参数有不确定性。
对参数进行分组绑定优化的复杂度取决于优化参数的数量,未知部分越多,需要的方程式越多,相应的点就越多。一些参数从一张影像到另一张影像有相同的变量。解决方案是为了降低问题的复杂性,在进行参数分组时,需要考虑影像相互之间的关系。利用切比雪夫多项式优化像片外方位元素,最高可优化到四次多项式[5]。对于POS解算精度较高的数据,空三优化处理一般只优化一次和二次多项式系数[6]。一般情况下,参数分组的命令为:
#cli_generate_grp-grp1 "31|32|33" -grp4 "12|13|14|25|26|27" -geom UAV -outfile grp_file
采用分组绑定优化,可以控制受地形因素(湖泊、较大河流)的影响,在影像区域内生成稀疏同名点而造成空三解算结果的不收敛。本次试验区域为东湖绿道二期规划项目,范围内较大区域为东湖,水域面积较大,绑定优化参数可以准确地对空三计算过程以及误差量测进行约束。空三优化是一个反复迭代的计算过程,有助于连接点的粗差探测及粗差点的自动剔除;有助于生成高精度的多重叠度连接点;有助于困难项目的工程管理和控制[5]。
2.3空三优化
对于第一次自动匹配生成的连接点,首先要从SRTM的低分辨率DEM中给连接点赋高程值,以获取物方坐标的初始值。我院刚进行的试验区飞行航向重叠度为82%,高航飞重叠导致影像自动匹配精度高、影像数据量成倍增长、立体模型有效范围降低。本实验将航线内隔张航片进行抽稀后,航向重叠度约为64%,在飞行状态稳定的情况下,符合航测生产的重叠度要求。对抽稀后的测区影像进行空三处理,并与未抽稀的数据进行比较,检验航向重叠度对无人机数据精度的影响[6]。
由于测量技术水平的提高,现在的野外像控点均是采取RTK获取,可同时得到该点位的平面和高程信息。因此空三加密中,像控点全部采用平高点布设。由于无人机基线短、单片覆盖范围小,按照规范中像控点布设规则对同一测区进行像控点布设,无人机较DMC数码航空影像所需的控制点数量为五至十倍的关系,甚至更多。若想更高效的发挥无人机优势,本项目分别对无人机测区的航向和旁向减少像控点的布设,并观察空三精度的变化。最后研究出一种最合理最高效的像控点布设方案。

图4 控制点点位编号
3 试验结果与分析
本次航摄项目采用的飞行平台为飞马F200型固定翼无人机。该无人机平台主要采用EPO泡沫材料构成,其重量轻、强度高。固定翼无人机飞行导航与控制系统主要包括飞行控件、GPS/INS惯性导航系统、GPS接收机、气压传感器、空速传感器、转速传感器等部件,主要作用是无人机的飞行导航、定位和飞行自主控制。它可以采用程控、半自主或自主飞行控制模式,实现飞行姿态、飞行高度、飞行速度的稳定控制,保障无人机按照预先设计的航线平稳飞行。F200搭载的是SONY DSC-RX1R型相机传感器尺寸达到了 35.9 mm×24 mm,有效像素 4 200万,镜头为 35 mm定焦,150 m得分辨率达到了 2 cm。
本次数据处理软件采用从法国空客集团引进的大型遥感数据批处理平台像素工厂PF和全数字图形工作站Mapmatrix。相机参数和航飞设计的原则:
①由于无人机相机的灵活性导致其稳定性较差,因此每次执行航摄任务前都必须接受正规的相机检校,获取最新的相机参数。
②航摄比例尺、航飞高度、航摄影像分辨率、航摄影像姿态和航向旁向重叠度都直接关系到测量产品的比例尺。根据无人机航摄技术规范要求,在确保其他航摄参数满足要求的情况下,对高航向重叠度的影像进行抽稀处理,分析总结航向重叠度不同对最终定向精度的影响。
空三优化最终结果达到要求之后,提交成果,然后需要进行DTM产品制作,创建立体像对,计算DSM,GSD设置为2倍的原始影像分辨率,快速生成一个粗DSM,GSD设置有 10 m,利用xv3d工具查看DSM,取得DSM有效值的范围如图5所示。根据需要对计算DSM结果进行高通或低通滤波,滤除高程异常值,再次MergeDSM,GSD设置为4倍原始分辨率。

图5 DSM有效值范围
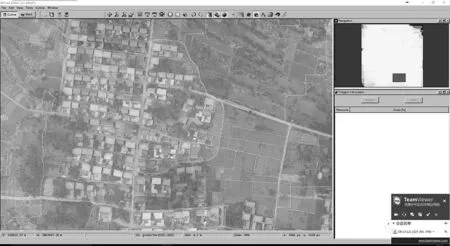
图6 编辑镶嵌线
根据需要对DTM进行重采样,若需要DOM产品,可以用20倍原始分辨率的DTM进行正射纠正,选择对应的DSM、DTM辅助生产镶嵌线,影像选择1×1全分辨率影像,但保持低分镶嵌工程的镶嵌线,工作区中编辑全分辨率镶嵌工程,导出快视图,在Photoshop进行调色,完成调色保存之前,在Photoshop中降位,变为8位输出。原始无人机航空摄影图如图7所示,对应区域无人机正射影像图如图8所示。

图7 原始无人机航空摄影图

图8 无人机正射影像图
无人机正射影像的几何精度,可以采用影像与控制点和检查点的套合检查以及拼接线的检查。快视图的颜色均匀应用到正射影像镶嵌中,并应用影像整体及局部的辐射信息,基于Wallis滤波器方法进行匀光,影像接边处色彩过渡自然,地物接边合理,人工地物完整,无重影和发虚现象。满足此次项目需求。
4 结 语
利用无人机航测技术快速圆满完成东湖绿道二期规划设计应急测绘保障任务,充分展示了我院在测绘地理信息应急保障的信息获取、数据处理、加工制作、快速打印等方面的技术水平,在关键时刻能够为政府决策、城市管理提供基础地理信息数据支撑的能力。
本项目研究满足大比例尺空三精度要求的最佳外业控制点布设方案。此研究成果将为空三作业节约大量的外业点布设工作量。大大提高了航测生产效率,节约了工作成本。无人机航测技术在大比例尺地形图中的应用将在城市化改造、数字城市、新农村建设、防灾救灾、土地利用与调查、地理国情监测等精细地理信息获取方面具有良好的应用前景。
[1] BIGNONE F. Processing of Stereo Scanner:From Stereo Plotter to Pixel Factory[R]. Stuttgart,2003:141~150.
[2] 曹敏,史照良. 新一代海量影像自动处理系统“像素工厂”初探[J]. 测绘通报,2006(10):55~58.
[3] 邢诚,刘冠兰. 像素工厂的研究与探讨[J]. 计算机与数字工程,2008(9):132~134.
[4] 邹晓亮,缪剑,张永生等. 基于像素工厂的无人机影像空三优化技术[J]. 测绘科学技术学报,2014(29):362~367.
[5] 李小红. 利用像素工厂处理卫片正射影像[J]. 北京测绘,2014(3):131~133.
[6] 周智勇. 基于像素工厂的无人机遥感影像处理研究[J]. 城市勘测,2013(5):53~56.
ResearchontheKeyTechnologiesofUAVintheEmergencySurveyingandMappingofEastLakeGreenRoadPhaseⅡ
Zhu Qiaoyun,Qiao Wei,Li Qiong,Gao Yabing
(Wuhan Geomatics Institute,Wuhan 430022,China)
Choosing typical area measurement using pegasus F200 unmanned aerial vehicle (uav) mount SONY RX1RII black card camera for large scale aerial photography,formulated from aerial drones,empty three encryption,three-dimensional mapping,finishing a series of large scale data obtained by the uav image and aerial mapping technology solutions.Studied of the uav remote sensing images by pixel factory three optimization technique,using aerial drones technology successfully completed the east lake green way fast phase ii planning emergency protection of surveying and mapping tasks.
UAV(unmanned aerial vehicle);PF(pixel factory);aerial triangulation optimization;the emergency of surveying and mapping
1672-8262(2017)05-39-04
P231
A
2017—07—11
朱巧云(1986—),女,硕士,注册测绘师,主要从事数字影像生产与开发应用工作。
本论文获得2017年“华正杯”城市勘测优秀论文二等奖。