无人机在城市基本地形图测绘中的应用
2017-11-14高志国
高志国
(1.广州市城市规划勘测设计研究院,广东 广州 510060; 2.广东省工程技术研究中心,广东 广州 510060)
无人机在城市基本地形图测绘中的应用
高志国1,2*
(1.广州市城市规划勘测设计研究院,广东 广州 510060; 2.广东省工程技术研究中心,广东 广州 510060)
依托低空无人机航测系统进行1∶500大比例尺地形图数据快速获取与处理方法的应用研究,简述了无人机作业的主要工作流程,探讨了无人机测图的关键技术。结合广州市2016年度基础地形图更新项目进行了 1∶500大比例尺地形图生产与成果精度评定。结果表明低空无人机航测技术在地势平坦、地形结构较简单地区满足 1∶500大比例尺地形图精度要求,具有明显的技术优势和良好的应用前景。
低空无人机航测;城市基本地形图;快速测绘;1∶500地形图;DOM
1 引 言
城市基本地形图是进行城市建设、规划管理、国土资源管理等最基本的基础地理信息资料。其在城市规划、建设、交通、管理、社会与公众服务以及可持续发展研究等众多领域的作用日益重要,对基本地形图的准确性、现势性和覆盖率的要求也越来越高。
随着数字化、智慧化城市建设的快速发展,城市基本地形图如何实现快速有效、实时更新,满足城市规划建设需要,是目前城市测绘工作亟待解决的难题之一[1]。
无人机低空遥感技术是航空遥感领域一个新的发展方向,具有低成本、方便快捷、灵活机动、高效率、高分辨率等特点,并已逐步应用于大比例尺地形图航空摄影测量领域[2,3]。凭借自身的技术优势,可快速、高效获取高精度、高分辨率的影像数据,成为传统航空摄影测量的有效补充手段[4,5]。
2 项目简介
2.1项目概况
为满足广州市规划建设需要,实现广州市基础地形图全覆盖,并建立广州市基础地理信息数据库,更好地为广州市十三五规划的实施提供基础测绘保障,广州市开展了2016年度城市基本地形图更新工作(1∶500数字化地形图测量及数据入库),项目测量面积 121.4 km2。本项目生产实践测区选择为赤泥C作业区,航测面积 3 km2,如图1所示。

图1 基本地形图更新项目测区示意图
2.2低空无人机平台
本项目采用TrimbleUX5HP无人机(如图2所示),该系统具有操作简便、全自动、精度高等特性,系统集成高性能Trimble GNSS接收机和a7R全画幅相机能够采集高分辨率的影像数据。后处理动态(PPK)GNSS技术可在绝对系统中建立非常准确的图像位置,有效减少地面控制点,获得高精度成果数据。

图2 UX5HPUAV
3 工作流程
无人机航测制作大比例尺地形图的主要工作流程如图3所示。
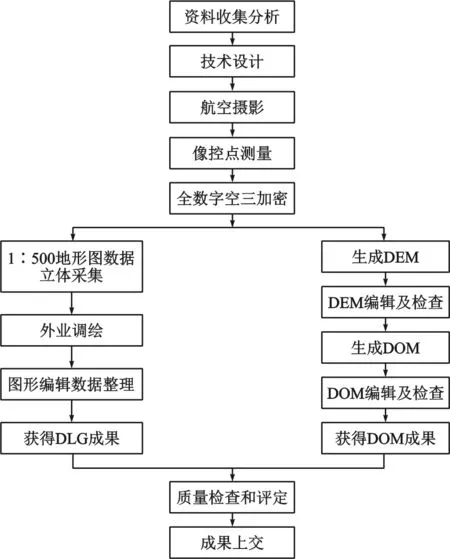
图3 无人机测图主要工作流程
3.1作业准备工作
主要准备工作包括:资料准备、设备准备、相机检测等。
(1)收集测区基础资料,如基础地形图、卫星影像资料、控制成果等,了解测区地理位置及情况。
(2)相机检校,获取准确的相机内方位元素和畸变参数。
(3)飞行平台设备进行检校与常规检查确保航摄平台各设备主要技术参数符合规范要求。
(4)现场踏勘选择合适的起降场地。
3.2航摄作业
3.2.1 航线设计
UX5HP飞行航线设计利用Aerial Imaging软件完成;为满足测图精度要求,提高飞行效率,本次航线设计采用索尼a7R II相机 35 mm镜头,航向重叠度设计为80%,旁向重叠度设计为80%,地面分辨率设计为 5 cm,航高设计 375 m,如图4所示。

图4 航线规划设计
3.2.2 控制点布设及测量
本项目航测采用地面架设GNSS基准站,利用PPK后处理动态差分技术提高定位解算精度。控制点布设按照相关规范要求,在测区范围内均匀布设地面控制点,利用广州市连续运行卫星定位城市测量综合服务系统(GZCORS)测量像控制点坐标,通过广州市似大地水准面精化成果转换为广州市坐标系坐标,共布设及测量控制点40个,如图5所示。

图5控制点布设方案
3.2.3 影像获取
影像获取主要包括起飞前检查、无人机航飞、现场数据整理、检查等。
(1)起飞前检查
为确保无人机航摄安全,飞机通电后需要进行自检及严格的安全检查,具体如下:
①gBox状态检查,线缆连接检查、GNSS天线视野开阔、gBox正常启动、锁定卫星检查。
②相机检查,SD检查、相机设置检查、设置快门速度、清洁相机镜头和滤镜、相机热插拔线路连接、尼龙扣带固定、相机触发器检查、快门反馈检查。
③跟踪器检查,确保跟踪器打开、接收器接收信号检查。
④升降翼检查,外弦升降翼与内弦升降翼水平检查、升降翼反应检查。
⑤发射架检查,发射架装配、安全插销插入发射架、弹力绳力度检查。
⑥空速反应检查,确保空速反应正常。
⑦飞机定位检查,飞机装配到发射架上,定位螺旋桨位置、飞机位置正确。
完成起飞前检查后,拆除安全插销,启用无人机系统,等待系统正常启动后,即可发射无人机。
(2)无人机航飞
无人机起飞后,按照规划路线升空进行影像数据采集,地面站开始对飞机工作状态进行实时监控,技术员应时刻关注无人机的状态、风速、飞机的高度及速度等指标,如发现异常应立刻做出判断和处理,如正常即按预定线路采集完成后返航降落。项目共航飞9架次,采集影像数据 2 600张。
(3)数据整理及检查
现场对航飞数据进行整理,核查拍摄照片数量与飞行轨迹参数是否一致,是否出现漏拍现象;检查照片质量,是否有模糊不清等情况;现场对航飞成果质量的进行全面、快速检查、计算航向重叠度、旁向重叠度、生成检查结果报表等。检查完成后如存在质量问题则需重新补摄飞行,若无质量问题,则本次航摄完成,如图6所示。

图6外业航飞质量检查
3.3数据处理与DOM制作
3.3.1 空三加密
数据预处理主要包括原片检查、POS数据整理、控制点数据整理等。预处理完成后利用INPHO软件进行空三加密处理。空三加密过程中,在立体像对的点位上选刺控制点,通过控制点点位调整及平差优化,最终从40个控制点位中选择了28个点作为控制点,其余点位作为检查点,同时为了增加模型连接的强度,避免由于某一个控制点的误差过大引发全局性的负面影像,在立体像片上增加一些模型连接点tie point参与空三平差。经过反复的点位调整、优化,最终达到平面 0.07 m,高程 0.06 m的绝对定向精度,如图7所示。
3.3.2 DOM制作
根据上述空三加密的成果,利用DEM数据对影像进行数字微分纠正和影像重采样,生成单片的数字正射影像DOM,由于无人机飞行高度较低,高层地物同名点视差较大,按照相机中心投影的成像原理,影像边缘投影误差较大,往往会出现接缝和建筑物边缘扭曲的现象,所以,需要对正射影像的镶嵌线进行人工编辑, 镶嵌线的选取及修改尽可能避免穿过大型建筑物,选择纹理不丰富的位置,远离影像的边缘,尽量沿道路及地面实体的边缘等。同时,对于不同拍摄角度、位置的照片存在的色差、亮度差进行匀光匀色处理,镶嵌线周边羽化处理,保证照片镶嵌自然,整体影像亮度、色差一致,如图8所示。

图7 空三加密精度报告

图8 0.05 m分辨率DOM成果
3.3.3 DLG立体采编
本项目1∶500DLG制作通过航天远景Map Matrix平台与清华山维EPS平台的定制与对接,利用EPS平台进行二次开发,使立体测图与得到“图属合一”的GIS数据的工作目的同时达成,相比国内目前绝大多数的DLG生产流程更为高效、先进。
(1)数据准备,准备INPHO空三平差工程文件及无人机原始影像数据,将必要的文件放到同一的文件夹的同级目录下,如影像ID、外方位元素文件,加密点文件,像点文件等,保持文件前缀名称一致。
(2)新建工程,打开EPS基础测绘平台,选择航测采编模块,建立广州市基础地理模板-500工程文件。
(3)模型恢复,选择立体测图菜单,加载立体像对,恢复立体模型。
(4)立体采编,挂接外接输入设备,设置工作区,开始进行数据采集工作。
按照立体模型实际能观测到的原则进行全要素采集,尽可能对可观测到的地物按照“内业定位、外业定性”的原则进行数字化跟踪,外业调绘修编等工作,共编制1∶500DLG成果216幅,如图9所示。
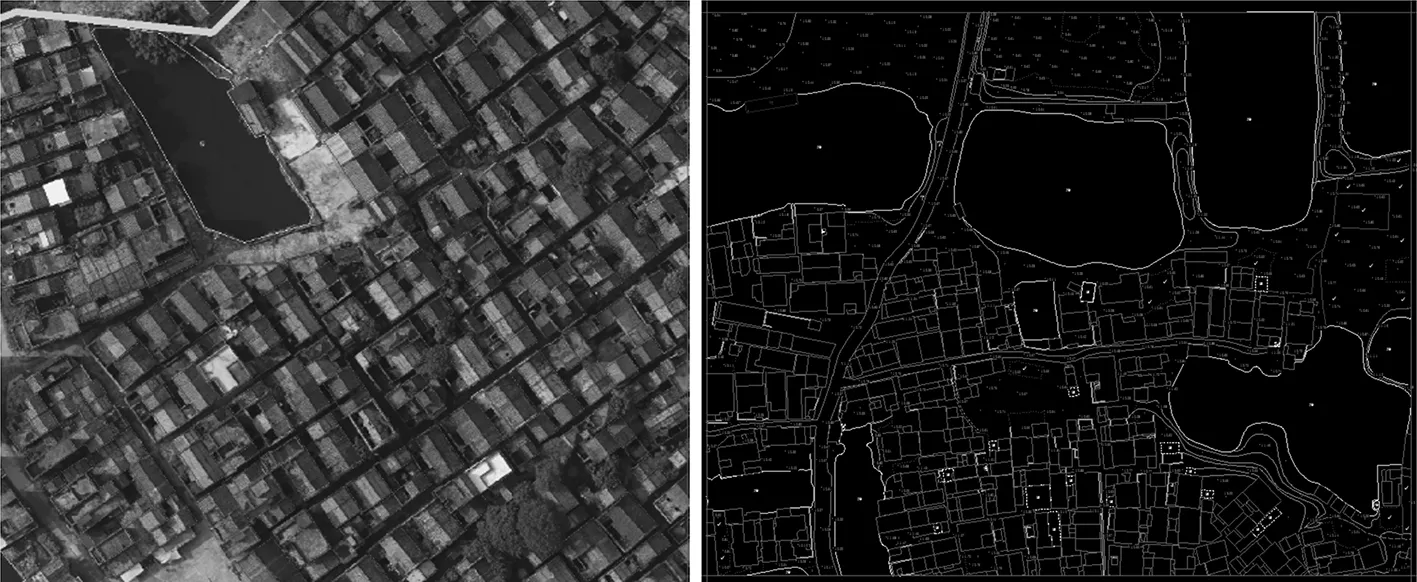
图9编绘的DLG
4 数据处理关键技术研究
4.1建筑物投影差改正[12]
本项目通过前期的研究成果,采用一种联合影像方位元素和物方三维点云数据的方法,利用投影中心、DSM、DEM上形成的同名点共线关系,由DSM物方点利用外方位元素计算出的DEM像方点之间的高差所构造出的数字高程模型,形成跟随影像点位同步变化的投影高差模型,此处称它为影像同步变化的投影数字差模型(image elevation synchronous model,IESM),通过该模型采用共线方程解算房屋屋角的三维坐标,从而实现了建筑物的半自动投影差改正。由于测区建筑主要以低层居民房为主,利用投影差改正模型取得良好效果,如图10所示。
4.2 EPS2012集成二次开发
本项目以广州市规划基础信息化测绘平台EPS 2012为基础,采用VC++6.0开发平台及VBScript脚本语言进行功能专业二次开发,实现了应用程序层以及全局数学函数库与控件库的动态链接SDL(Sunway dynamic linked library),快速搭建了基于EPS2012航测采编平台,实现运行时动态加载或输入命令加载,如图11所示。新开发的EPS测图功能集成模块化管理,通过菜单工具条加载功能,延续了EPS原有功能界面与操作习惯。同时对数据模板进行标准化封装,实现 1∶500~1∶2000数据标准在制图显示过程中强制标准化,实现数据生产、制图输出、数据建库、数据应用四者一致性,有效保证数据无异化。

图10 投影差改正原理及效果图
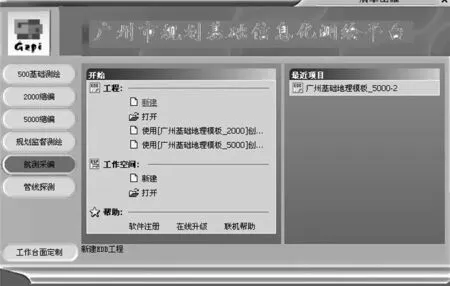
图11 基于EPS2012平台开发的测图系统
5 项目成果与精度分析
基于无人机航摄数据,经上述流程化的处理,得到测区DOM、DEM、DLG等,为了保证成果精度,对本次航摄测绘的地形图成果精度进行外业检测,采用GZCORS_RTK快速获取外业检查点的三维坐标数据,整个测区内施测平面坐标及高程检测点122个、距离检测点83个,利用中误差计算公式计算出各个检查点的中误差,依据计算结果可得(如表1所示),本次航摄绘制的 1∶500地形图精度满足《低空数字航空摄影测量内业规范》的精度要求。可作为基础测绘成果提供使用。
6 结 语
本文无人机航摄测绘大比例尺地形图生产应用,基于地形结构较简单、地势比较平坦地区,经实地检测,成果满足大比例尺地形图精度要求,作业效率也较传统测量模式有大幅提高,有效提高生产效率,缩短生产周期,加快了内、外业数据成产的一体化作业流程。满足了项目建设快速完成测绘任务的要求,为大比例尺地形图快速测绘提供了新的技术手段。
随着数字城市、智慧城市建设的全面发展,城市规划及建设对地形图的需求与日俱增,且更新周期越来越短。低空无人机航摄系统,凭借低空作业、机动灵活、高分辨率、高精度、高效率、低成本等特点,已广泛应用于城市规划、低空航空摄影、应急测绘、环保监测、工程勘察等领域。随着无人机航摄技术的不断成熟,续航能力、飞行稳定性、小像幅等缺点也将逐步得到改善,使其有更广阔的应用前景和优势。

无人机航测地形图精度检测表 表1
[1] 曹兵. 城市基本比例尺地形图动态联动更新机制[J]. 测绘工程,2016,25(5):78~80.
[2] 刘玉洁,崔铁军,郭继发等. 无人机航摄大比例尺测图的关键技术分析[J]. 天津师范大学学报·自然科学版,2014,34(2):37~40.
[3] 陈杰,童小华,刘向锋等. 黑河流域中游无人机遥感影像数据处理[J]. 地理信息世界,2014,21(1):63~67.
[4] 高志国,宋杨,曾凡洋. 微型无人机航摄系统快速测绘小区域大比例尺地形图试验分析[J]. 工程勘察,2015,12(1):71~75.
[5] 王湘文,于启升,王雅鹏. 无人机低空摄影测量系统在大比例尺地形图中的应用[J]. 地矿测绘,2013,29(1):34~36.
[6] 何敬,李永树,徐京华等. 无人机影像制作大比例尺地形图试验分析[J]. 测绘通报,2009(8):24~27.
[7] 杨爱玲,于洪伟,郑灿辉. 关于轻型无人机航摄影像的质量探讨[J]. 测绘与空间地理信息,2011,34(2):185~187.
[8] 李永树. 基于无人机技术的地形图测绘研究[J]. 测绘,2011,34(4):147~151.
[9] 张惠均. 无人机航测带状地形图的试验及分析[J]. 测绘科学,2013,38(3):100~102.
[10] 鲁恒,李永树,何敬等. 无人机低空遥感影像数据的获取与处理[J]. 测绘工程,2011,20(1):52~54.
[11] 薛永安,王晓丽,张明媚. 无人机航摄系统快速测绘矿区大比例尺地形图[J]. 测绘地理信息,2013,38(2):46~48.
[12] 李长辉,王峰,王磊等. 城市机载LiDAR测图系统关键技术研究与应用[J]. 测绘通报,2013(8):36~39.
[13] 史占军,于志忠,郭志强. 无人机摄影测量在1∶2000地形图的应用[J]. 吉林地质,2011,30(3):133~136.
ApplicationofUAVinSurveyingandMappingofUrbanBasicTopographicMap
Gao Zhiguo1,2
(1.Guangzhou Urban Planning Design & Survey Research Institute,Guangzhou 510060,China;2.Guangdong Provincial Engineering Technology Research Center,Guangzhou 510060,China)
Application research and processing method for rapid acquisition the1∶500 large scale topographic map data relies on the Unmanned Aerial Vehicle low altitude aerial system,introduced the main workflow and the key technologies of UAV image mapping is studied,in the city of 2016 basic map updating project with low-altitude UAV aerial production the 1∶500 large scale topographic map production practice and Accuracy Analysis of Project Achievements.The result show that UAV aerial surveying technique can meet the requirements of 1∶500 large scale topographic map has obvious technical advantage and good application prospect in large-scale topographic map rapid mapping in flat terrain and simple terrain structure.
UAV-aerial system;urban basic topographic map;rapidSurveying;1∶500 topographic map;DOM
1672-8262(2017)05-29-06
P231.5
B
2017—07—26
高志国(1981—),男,硕士,高级工程师,主要从事测绘新技术研究及应用。
广东省科技计划产学研专项(2015B090903020)
本论文获得2017年“华正杯”城市勘测优秀论文二等奖。