PIXHAWK开源飞控的多旋翼无人机避障技术研究
2017-11-09,,
,,
(华北水利水电大学 电力学院,郑州 450011)
PIXHAWK开源飞控的多旋翼无人机避障技术研究
王亭岭,芦杜洋,马跃涛
(华北水利水电大学 电力学院,郑州 450011)
针对当前无人机的安全问题,提出一种基于PIXHAWK开源飞控的无人避障控制方法。在PIXHAWK开源飞控中添加了超声波传感器、激光测距仪、电磁传感器,并对不同传感器的信息进行融合,依据无人机与障碍物的距离及遥控器的通道值,解算出无人机远离障碍物的姿态信息,实现多旋翼无人机的避障飞行。实验结果证明,该系统具有价格便宜、控制精度高、安全性能可靠的特点,在无人机安全飞行领域具有一定的应用价值。
UAV;PIXHAWK飞控;避障;多传感器信息融合
引 言
多旋翼无人机自动避障系统[4]可以有效地减少撞机、撞人事故的发生,保护生命及财产安全,这对无人机发展产生推动作用。多旋翼无人机的自动避障,就是当无人机在飞行时,利用各种传感器不断检测飞行路线上的各种障碍物,并根据传感器传回的数据控制无人机做出适当的飞行动作,达到躲避障碍物、安全飞行的目的。
目前,在主流的无人机避障系统中,主要实现方法分别是超声波[5]、激光雷达、双目视觉图像处理[6]以及这几种方法组成的复合方法[7]。这几种方法分别有各自的优缺点:超声波测距模块价格便宜、重量轻、测距方法简单,但是测量距离比较短;激光雷达测距具有测距准确、测量距离远的优点,但其缺点是需要特殊的硬件,而且成本比较高;双目视觉图像处理需要较高的环境要求,需要额外的飞行控制器且算法复杂。本项目以PIXHAWK开源飞控为平台,以PX4开源程序[8-9]为软件,通过串口方式读取无人机与障碍物的距离,同时也获取遥控器的输入值,再根据输入值来判断是否为安全操作,如果为不安全操作则在飞控程序中修改遥控器俯仰通道的值,使无人机自动朝着远离障碍物的方向飞去,在此期间不断检测无人机与障碍物的距离,若为安全距离则悬停等待遥控器的输入指令,这样可以更加准确、稳定地控制无人机达到避障的目的。
1 系统总体方案设计
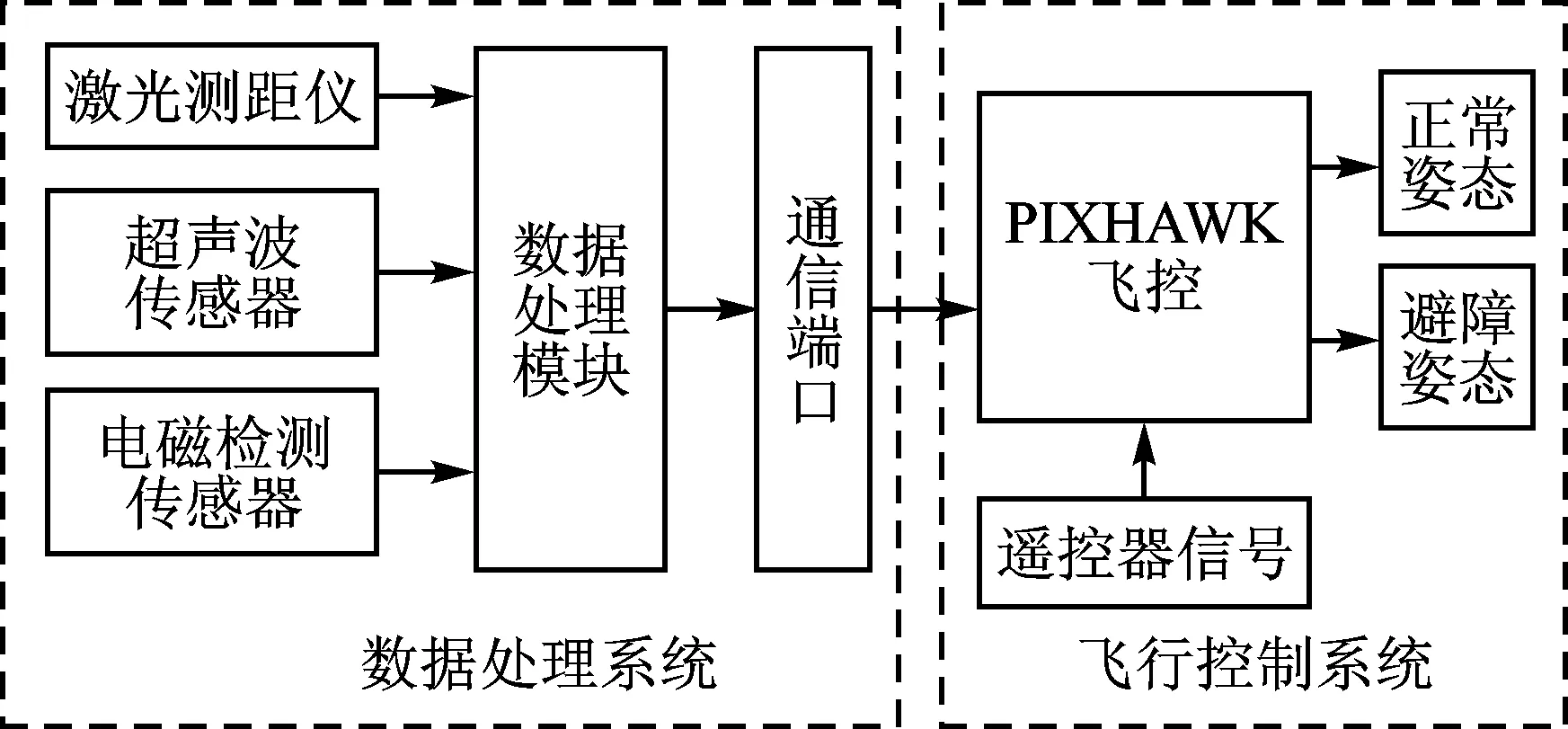
图1 无人机避障系统整体方案
本无人机避障系统总体方案如图1所示。本避障控制方案是在PIXHAWK开源飞控的基础上对程序进行了改进,以实现无人机自动避障的目的。本系统具有两大部分。第一部分为数据处理系统,主要由激光测距仪、超声波传感器和电磁检测传感器、数据处理模块和通信端口组成。其工作原理为:利用激光测距仪、超声波传感器、电磁检测传感器测量无人机与障碍物距离,再通过数据处理模块对这些数据进行融合处理,最后通过通信端口发送给飞控。第二部分为飞行控制系统,主要器件为PIXHAWK飞控板和遥控器,其主要功能是读取数据处理系统发送过来的距离信息,同时也接收遥控器传进来的控制信号,根据接收到的距离信息及遥控器信号进行逻辑判断,并根据遥控器原始信号进行解算输出姿态,或者执行避障姿态。
2 主要器件选型
目前,市面上所使用的无人直升机飞控种类众多,大部分价格昂贵,且硬件封装程序不开源,不利于学习研究及二次开发。因此本文选用了一款低成本、高性能而且完全开放的飞控系统。PIXHAWK是目前市面上一款非常流行的飞控,其硬件质量可靠、软件开源、功能齐全,有利于我们对无人机的研究及二次开发。
PIXHAWK[10-11]主要功能如下:
① 自动稳定飞机的姿态,即自动保持偏航角、俯仰角、滚转角于某一目标角度,倾斜角保持为零,进行直线飞行(平直飞行、爬高、下滑);
② 操控员可以通过遥控器给定任意航向或俯仰角,使飞机自动改变航向并稳定于该航向,或使飞机上仰、下俯,并保持给定的俯仰;
③ 自动保持定高飞行;
④ 飞机悬停某一固定高度定点飞行;
⑤ 多种飞行模式,且可切换飞行模式,按选定模式飞行,如自稳模式、定高模式、悬停模式和一键返航模式等。
无人机在飞行时,其周围的环境复杂多变,利用单一的传感器很难准确地检测到各种障碍物。因此,本文采用多种传感器信息融合技术来获取无人机周围环境信息。因此选择电磁场检测传感器、超声波测距传感器、激光测距仪作为无人机的测距传感器。本文选取型号为KS109的超声波测距传感器,该传感器通过I2C接口和TTL串口实现与数据处理模块的通信,并且可设定地址,单个I2C总线可挂载20个不同地址的设备,并有低功耗模式,在测距算法中采用此功能,能够大大降低传感器功耗。传感器的测量范围为8~1 000 cm,可以精确到1 cm。电磁传感器主要用来测量无人机与飞行方向上的输电线路的距离。鉴于无人机的负载能力,设计了一款电磁检测传感器,并且满足以下性能要求:对于不同的输电线路,根据电压等级的不同可以设置不同的测量范围,如当电压等级为110 kV时,测量距离大于8 m;当电压等级为220 kV时,测量距离大于12 m;当电压等级为500 kV时,测量距离大于15 m,设计的电磁检测传感器工作性能稳定可靠。
3 软件设计
3.1 软件流程
本无人机避障系统软件流程设计如图2所示。在飞控系统上电初始化后,循环读取距离信息和遥控器信号,对距离信息进行判断处理。若距离大于设定距离,则按照遥控器输入的原始信号进行姿态解算,从而控制飞机正常飞行。若距离小于设定距离,则进入下一个判断,按照遥控器输入信号解算姿态判断飞机是远离障碍物还是靠近障碍物,若为靠近障碍物,则按照设定值进行姿态解算,从而控制无人机远离障碍物。由于程序是不断循环、不断判断的,所以当距离回到安全距离时,又可以按照遥控器的输入信号进行姿态计算,正常飞行。

图2 程序设计流程图
3.2 避障算法实现
基于上述设计流程,在飞控系统中对避障算法进行了软件实现,在飞控代码中,无人机的前后左右运动是按照遥控器输入的俯仰值和横滚值[12]来控制的,可以通过修改这些值来控制无人机的运动方向,从而达到避障的目的。PIXHAWK飞控有多种飞行模式,本避障系统可以在多种模式下实现避障功能,以悬停模式及检测前方障碍物为例介绍此功能。首先将安全距离D设置为1 600 mm,并读取数据处理模块发送过来的距离信息。假设飞行前方有障碍物,接下来以3种情况来进行介绍:
① 当障碍物距离大于1 600 mm时,此时无人机与障碍物保持在安全距离之外,按照接收到的遥控器俯仰值来控制无人机。
② 当障碍物距离小于1 600 mm时,无人机已经进入危险距离,应再对遥控器输入的俯仰值进行姿态解算,若解算后无人机的飞行方向是向后飞行即远离障碍物,则此时仍然按照遥控器的输入值控制无人机。
③ 当障碍物距离小于1 600 mm时,无人机已经进入危险距离,应再对遥控器输入的俯仰值进行姿态解算,若解算后无人机的飞行方向仍是向前飞行,即靠近障碍物,此时应按照避障姿态远离障碍物。由于飞控程序是不断循环执行的,当无人机后退至安全距离之后,会悬停等待遥控器的输入值,并且按照遥控器输入值进行姿态解算,控制无人机。
4 实验结果
为验证本避障系统的有效性、可靠性,本文以四旋翼为飞行平台,选择PIXHAWK飞控及PX4开源飞控系统进行无人机的避障飞行实验。首先利用串口调试助手,将实验结果在电脑上显示出来,图3为正常飞行时无人机的俯仰值及向前的加速度值,此时传感器检测到前方障碍物距离为2 004 mm,小于1 600 mm,所以此时为安全状态,无人机按照飞行员输入的俯仰值解算出向前的加速度为187 cm/s。

图3 正常行驶
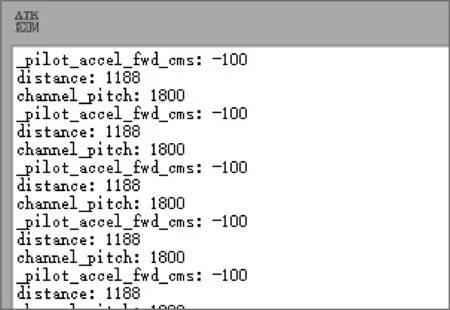
图4 进入危险距离
图4为进入危险距离后无人机的俯仰值及向前的加速度值。此时飞控接收到数据处理模块传回的距离信息为1 176 mm,认为此时已进入危险状态,所以将按照100 cm/s的加速度后退,直至退到与障碍距离大于1 600 mm时,交还飞控手对无人机的控制权。
在实际飞行中,当无人机匀速接近障碍物时,会有效地执行避障动作,当无人机后退至安全距离后悬停,此时遥控器可以自由地控制各种飞行姿态,成功实现了避障目的,保护了无人机的安全。
结 语

[1] 王力群,林朝辉.基于Arduino UNO平台的多适配性无人机避障技术[J].科技创新导报,2016(9):18-19.
[2] 徐华东.无人机电力巡线智能避障方法研究[D].南京:南京航空航天大学,2014.
[3] 周士超.无人机电力巡检视觉避障技术研究[D].北京:北京理工大学,2016.
[4] 张西忱.无人机的避障技术及其应用[J].集成电路应用,2017(2):66-68.
[5] 沈阳阳,杨光,刘智.基于超声波技术的四旋翼无人机定高控制系统的研究[J].电子技术与软件工程,2017(1):80.
[6] 苏东.基于双目视觉的小型无人飞行器的导航与避障[D].成都:电子科技大学,2014.
[7] 任耀庭.基于超声波测距与图像信息相融合的旋翼无人机避障算法研究[D].成都:电子科技大学,2016.
[8] 樊超,胡小安,伟利国,等.基于PX4构建高可靠农用微小型无人机数据链的实现方法[J].农机化研究,2016(9):224-228.
[9] 陈子杰,刘永辉,赵厚宝,等.基于PX4构建高可靠多旋翼控制器的实现方法[J].软件产业与工程,2014(6):38-42.
[10] 赵伦.基于Pixhawk飞控板的六旋翼飞行器自适应动态逆控制技术研究[D].北京:北方工业大学,2016.
[11] 牟涛.Pixhawk飞控技术在植保无人机上的应用与实践[D].西安:西京学院,2017.
[12] 袁栋,陈旭芳,郁乐乐.基于PIXHAWK和IAPF法桥检无人机避障[J].低温建筑技术,2017(2):40-42.
[13] 蒋彪,杨光友,邓慧军,等.小型四旋翼飞行器位姿建模及其仿真[J].湖北工业大学学报,2016(5):18-21,35.
[14] 李浩涛.基于四旋翼无人机传感器数据采集与处理的研究[D].天津:天津大学,2012.
[15] 彭华厦,易鑫.基于AVR通用多旋翼避障系统的设计[J].电子制作,2016(9):13-15.
王亭岭(副教授),主要研究方向为分布式控制与优化、传感网络与嵌入式控制技术;芦杜洋(硕士研究生),主要研究方向为工业控制智能检测技术;马跃涛(硕士研究生),主要研究方向为先进控制理论及应用。
ResearchofObstacleAvoidanceforMultipleRotorUAVBasedonPIXHAWK
WangTingling,LuDuyang,MaYuetao
(Department of Electric Power,North China Institute of Water Conservancy and Hydroelectric Power,Zhengzhou 450011,China)
Aiming at the security problem of current UAV,an unmanned obstacle avoidance control method based on PIXHAWK open-source flight control is proposed.Ultrasonic sensors,laser rangefinder,electromagnetic sensor are added in the PIXHAWK open-source flight control according to different sensor information fusion.The distance of the obstacle and the remote control channel value,attitude information of UAV are calculated from the obstacle avoidance,and the flight obstacle avoidance of multi rotor UAV is achieved..The experiment results show that the system has the characteristics of low cost,high control accuracy and reliable security performance.It has certain impetus in the field of UAV flight safety.
UAV;PIXHAWK flight control board;obstacle avoidance;multiple sensors information fusion
TP27
A
2017-06-30)