基于射频技术的智慧物流分拨仓
2017-11-08李兴国端木希睿廖鸿辉陈麟杰郭贺朋
李兴国+端木希睿+廖鸿辉+陈麟杰+郭贺朋
摘 要:本文介绍了一种通过曲柄滑块结构完成分拣的物流机械系统。本系统采用STM32F103控制,通过射频阅读器检测识别快件,步进电机实现对曲柄结构的控制进而完成对快件的分拨。整个系统能够完成快件信息的高速读取与分拣,易于组装和系统优化。
关键词:物流分拣 射频 RFID 曲柄滑块
中图分类号:TH1 文献标识码:A 文章编号:1003-9082(2017)09-0-01
绪论
目前我国物流业中存在包裹分拣速度慢,人工费时费力,分拣动作不规范化导致包裹受损等问题,国外有能够完成自动化分拣的物流机器人,但造价昂贵,并不能适用于中国物流订单量大,物流包裹大小不一的情况。针对这些问题本文介绍了一种新型的能够通过RFID技術帮助物流中转中心完成自动化分拣的设备,可以通过在现有的分拨仓传送带上加装步进电机驱动的曲柄滑块结构的物流分拣推手完成分拣动作,并配合缓冲轨道保护包裹的安全。
一、曲柄滑块结构
本设计的主要运动部件是四杆滑块机构,四杆中除机架以外其余三杆依次是主动杆、中间杆和推杆,其长度依次为97mm、197mm、300mm(此长度是执行长度,即除去了螺栓联接部分和两端的长度)。主动杆的转速可以根据相应的实际情况进行更改,初步设置为2.5r/s(即150r/s)。
二、分拨机主要机构简单运动学、力学计算
假设传送带的宽度是300mm,运行速度是1m/s,传送带与被传送的物体之间的摩擦因数μ为0.36,物体被传送时放置于传送带的中间,取重力加速度为9.8N/Kg。在某一位置处有一个分拨装置,分拨装置给被传送物体的加速时间为0.14s,即传送带运动0.14m,由分拨装置的结构可知加速距离为13.5cm,推杆的平均加速度约为12.3m/s2,设某一物体的质量是1.75Kg,则推杆的推力至少应为21.525N。
所以分拨机给物体(快递)的合力为:;
有上述的计算可知,横向分拨装置在推出被传送的物体的过程中的平均速度是,横向分拨装置的最前端的理论安装位置是距传送带边缘(分拨装置安装一侧)30mm。
由上述计算可简单计算出四杆滑块机构中的主动杆上端应该提供的垂直于主动杆的力的大小为35.80N,所以主动杆所提供的扭矩为3.33N·m,考虑到四杆滑块机构其本身质量和作用在其自身的加速度的影响,步进电机的输出扭矩选择3.5N·m,由功率计算公式初略计算出步进电机的瞬时功率为49.48w。结合步进电机转速和扭矩综合考虑(150r/min、3.5N·m),步进电机的型号选为57BYG250-76(自带减速器,减速比为1∶7.5,输出扭矩最大可达1.48×7.5=11.1)。
三、MCU控制简述
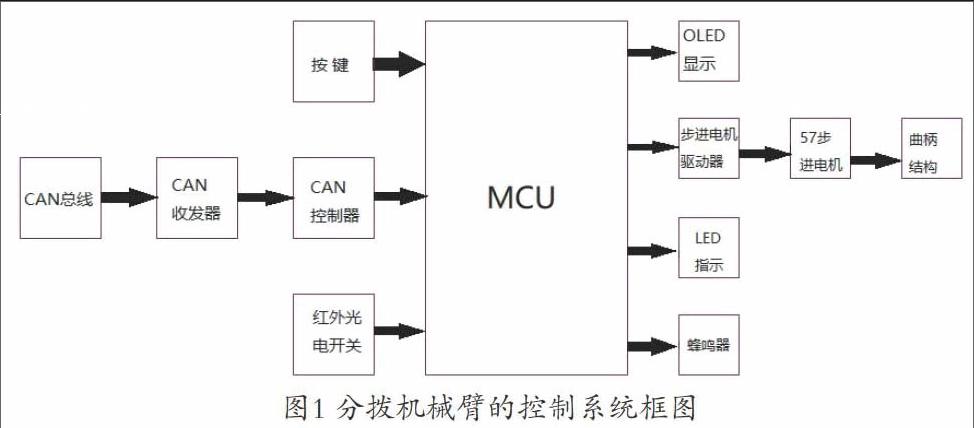
本系统采用ST公司的stm32f103rbt6为核心控制器,通过与阅读器进行通信,实现对快件的物流信息获取,然后通过协调器将其交付给数据服务器并判断快件是否发错或者返回,以及对快件的分拨。其整体功能图如图2所示。
首先协调器通过阅读器对电子标签上的信息进行读取,并将该信息传回数据库服务器上判断该包裹是否应当发往本分拨中心,如果不是,就会提醒工作人员进行检查,该快件是发错、还是需要返回的快件,如果是就将快件放入传带上,在信息比对确认是发往该分拨中心后,将相应信令通过CAN控制器发送给控制相应的分拨机械手的MCU,在MCU内部,使用队列(Queue)这一先进先出(FIFO)的数据结构对信令进行存储,采用循环队列实现存储功能。
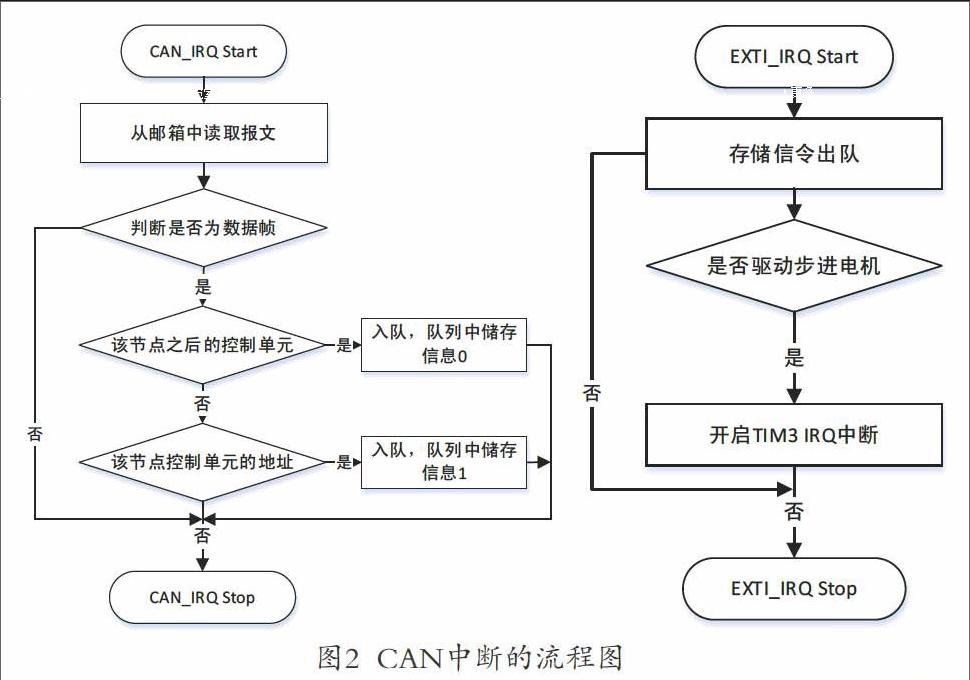
当控制相应的分拨机械手的MCU接收到来自CAN总线的命令的时候,接收报文,并将控制信息进行入队操作,存储控制信息其入队存储实现如图3左图所示;MCU通过外部的传感器是否扫描到有快件通过来实现对存储信息的控制队列进行出队的操作,并对控制信息进行判断,如果控制信息内容是0就不对快件进行操作,如果控制信息内容是1,MCU对步进电机的控制器发送控制信号,进而步进电机控制器对步进电机进行励磁,从而带动机械臂,将快件分拨到收纳网中,其流程图如图3右图所示。当分拨机械手分拨的快件达到一定的数量的时候,MCU会自己发出提示提醒工作人员将物品收纳网进行打包。
结束语
以上通过曲柄滑块结构完成分拣的物流机械系统,以STM32F103为控制系统,通过射频阅读器快速读取快件上的电子标签上的信息,来实现快件高效的分拣。经实验检测此分拣设备能够在一分钟内完成50次物流的分拣工作,通过机械及自动化来代替人工枯燥的劳动是未来必然的趋势,是一种解决物流问题的可靠方案。
参考文献
[1]林光春.机械设计课程设计 [M].四川:四川大学出版社,2013.
[2]张毅刚.单片机原理与应用设计 [M]. 北京:电子工业出版社,2016.
[3]邱宣怀.机械设计 [M]. 北京:高等教育出版社,2014.
[4]唐文彦.传感器 [M].北京:机械工业出版社,2014.
[5]易红.数控技术 [M]. 江苏:东南大学出版社,2013.
[6]陈越、何钦铭等. 数据结构[M],高等教育出版社,2016.6.endprint
