车载便携式农家肥捡拾装置设计与试验研究
2017-11-08刘宏新王佳兴付露露
刘宏新,王 晨,王佳兴,付露露
(东北农业大学工程学院,哈尔滨 150030)
车载便携式农家肥捡拾装置设计与试验研究
刘宏新,王 晨,王佳兴,付露露
(东北农业大学工程学院,哈尔滨 150030)
针对农村畜禽养殖造成的环境污染问题,设计一种可快速拆装车载式农家肥捡拾装置,对其核心部件集送搅龙作机理分析与参数优化。通过分析装置使用环境特点及技术要求,综合物料受力及运动分析确定基础参数及结构,使用CATIA(Computer aided three-dimensional interactive application)作三维模型及数字样机构建;以搅龙螺旋直径、收集搅龙螺距以及搅龙主轴转速为变量,输送量与功耗为响应指标,作二次正交旋转组合EDEM(Engineering discrete element method)虚拟仿真试验。针对5 t·h-1设计指标,理论分析与仿真获得搅龙参数组合为:搅龙螺旋直径200 mm、提升搅龙螺距160 mm、收集搅龙螺距120 mm、搅龙主轴转速107 r·min-1,功耗1.118 kW。样机试验结果表明,分段式集送搅龙总体技术方案以及快速拆装形式可满足农家肥捡拾需求,具有良好使用环境适应性,研究为搅龙机构拓展应用提供借鉴与参考。
农业机械;畜禽养殖;农家肥捡拾;车载式;快速拆装;集送搅龙
现代农业追求高产、高效,经济利益驱使与短平快生产习惯使农家肥使用与生物资源循环应用进展缓慢。农民忽视或无法利用农家肥不仅造成环境污染,同时大量使用化肥引发土壤板结等问题。农家肥合理利用是绿色农业、生态农业、可持续农业重要途径与特征之一。
目前,农家肥收集尚处于人工捡拾阶段,效率较低,使用装载机等工程类设备成本高,环境适应性差。提供适用收集装备是弃废物肥源利用与工程应用前提。
国内学者研究捡拾装置主要针对牧草、秸秆、花生等农作物。王振华等研究方草捆压捆机捡拾器[1],王国权等研究秸秆捡拾打捆机均采用滑道滚筒弹齿方式作捡拾[2];尚书旗等研究花生捡拾收获机采用链式尼龙弹齿方式作捡拾[3];衣淑娟研究豆类捡拾脱粒机采用拨指式方式作捡拾[4];石磊等研究油菜分段收获机采用齿带式方式作捡拾[5]。对于法国经济发达国家来说,畜禽养殖集约化规模化程度高,各项基础设施与配套装备完善,动物粪便处理采用发酵、分解提炼等方式处理后作为有机肥施入土壤,具有很高的使用价值[6]。而对于捡拾装置研究也仅限于牧草、秸秆等[7-8],大多采用弹齿滚筒式捡拾装置,如NEW HOLLAND生产的捡拾装置采用曲线结构弹齿,可以捡拾秸秆较短作物[9];CLAAS KGaA mbH为保证捡拾率,设计弹齿前端为钩形捡拾装置[10]。
综上,现有装置及相关研究均针对作物或秸杆捡拾,无法应用于农家肥。本研究以集送搅龙为核心捡拾部件,利用快速折装机构将其安装于农闲拖拉机或农用车,构成作业机组,专用于农村道路及两侧边沟散落农家肥收集,充分利用现有动力资源并实现新作业功能。
1 总体结构及工作原理
1.1 总体结构
设计采用便携车载式技术方案,装置可挂接于各类农用车箱一侧,采用可快速拆装设计。动力方面,对于拖拉机牵引挂车组直接利用拖拉机液压输出动力,对其他农用汽车,在变速箱上增设分动器(一般货车变速箱均设置动力取出检视口,提供相应取力装置,易于实现)构成液压驱动源,驱动捡拾装置工作。该捡拾装置主要组成部分:捡拾及输送分段式集送搅龙1、挂接拆装架2以及收放机构3,组成如图1所示。
1.2 工作原理
农家肥捡拾装置在收集散落及堆积路边或两侧边沟内肥料时,通过液压缸驱动将图1运输状态转换为图2所示工作状态。车辆前进过程中,收集搅龙11放置在堆积肥料路面或探入边沟13内,肥料由收集搅龙收集并输送至提升搅龙6,再由提升搅龙输送至车箱4,完成农家肥捡拾过程。此时将倾斜液压缸5、调整液压缸10设置为浮动状态,配合收集搅龙仿形滑靴12,遇到起伏时收集搅龙可绕两段搅龙筒球铰9摆动,同时提升搅龙通过与之连接滑道8沿着滑轮7上下滑动,成为具有联动作用仿形机构,适应复杂地面状况。

图1 车载式农家肥捡拾装置总体结构Fig.1 Overall structure of in-vehicle collecting devicewith farmyard manure

图2 车载式农家肥捡拾装置工作状态Fig.2 Working condition of in-vehiclecollecting devicewith farmyard manure
2 关键部件
2.1 快速拆装架
快速拆装架用于固定捡拾装置,操作简便,可随时改装农用车辆,并在工作过程中调节出料口位置。快速拆装架主要由两个对置夹板1、2,拧紧螺栓3,支撑板4、5以及接触轮6、7组成,如图3所示。对置夹板通过上部螺栓改变夹持状态,实现快速拆装。接触轮便于将拆装架在车箱上移动,改变捡拾装置及出料口位置。两个支撑板焊接在夹板1一侧,连接收放机构。
2.2 收放机构
收放机构控制集送搅龙在运输状态与工作状态之间转换,由滑道1、滑轮2、倾斜液压缸3和摆动液压缸5组成,如图4所示。集送搅龙连接在位置4处。倾斜液压缸将集送搅龙置于倾斜位置,再通过摆动液压缸逆时针旋转90°,使捡拾装置由图1所示运输状态转换为图2所示工作状态。

图3 快速拆装架Fig.3 Celerity assembling and disassembling frame

图4 收放机构Fig.4 Frapping and releasing mechanism
2.3 集送搅龙
2.3.1 结构设计
集送搅龙是农家肥捡拾装置核心工作部件,由收集搅龙与提升搅龙组成,如图5所示。两个搅龙轴6、10使用万向节7连接,两个搅龙筒采用球形铰接。收集搅龙叶片1带有破碎爪2,搅龙筒9为半开放状态,下部装有仿形滑靴8,作业时物料通过开放筒侧喂入,未进入物料切面封闭搅龙筒,如图5b所示,形成完整功能结构,保证集送搅龙输送作用。提升搅龙叶片4在球形铰接处为无轴式搅龙叶片,增加折边结构以利于物料过渡喂入。
2.3.2 基础受力与运动分析
螺旋输送机在输送物料过程中,物料受旋转螺旋叶片作用,并非单纯直线推进运动,而是一种空间运动。当螺旋面升角展开时,螺旋线用一条斜直线表示[11],则旋转螺旋面作用于半径为r处物料颗粒受力及运动如图6所示。

图5 集送搅龙Fig.5 Collecting and transporting auger

图6 颗粒在集送搅龙中受力及运动Fig.6 Forceand motion of particle in screw blade of collecting and transporting auger
由图6a可得物料在收集搅龙螺旋叶片上力学方程:

式中,μ为物料与搅龙螺旋叶片摩擦系数;ω为物料在收集搅龙螺旋叶片上角速度(rad·s-1);g为重力加速度(m ·s-2)。
将式(2)代入(1)得:

由图6b获得物料在收集搅龙螺旋叶片上运动学方程:

其中:

式中,n为搅龙转速(r·min-1)。
将式(5)代入式(4)可得:

物料沿收集搅龙轴向方向运动速度为:

如图6c所示,物料颗粒在提升搅龙螺旋叶片上力学方程:

同理,物料在提升搅龙螺旋叶片上运动角速度:

式中ω'为颗粒在提升搅龙螺旋叶片上运动角速度(rad·s-1);
由图6d同理可得,物料颗粒沿提升搅龙轴线方向运动速度:

当提升搅龙轴向输送速度大于或等于水平收集搅龙轴向输送速度(V1'≥V1)时,不存在堵料、推料等现象,即满足公式(11):

在收集搅龙与提升搅龙铰接处,物料与搅龙螺旋叶片受力及运动学分析如图6所示,当物料沿收集搅龙轴线运送到两段式搅龙连接球铰处,提升搅龙段无轴式叶片则向上连续提升物料,满足公式(11)时,可以保证物料连续传递与正常输送。
2.3.3 状态与结构参数
搅龙输送量基本函数关系如式(12)所示[12]。

式中:Q为输送量(t·h-1);D为搅龙螺旋直径(m);s为螺距(m);n为搅龙主轴转速(r·min-1);φ为填充系数(物料堆集截面积和搅龙截面积比),与提升搅龙倾角有关;C为倾斜系数,与搅龙倾角有关;ρ为单位容积质量(t·m-3)。
由式(1)可知,影响输送量因素较多,且部分因素相互关联。因此,为合理设计搅龙,本文分析集送搅龙应用环境,确定初始设计参数及关联参数取值。因两段式集送搅龙作业能力取决于倾斜提升搅龙,参数计算均以提升搅龙为准,水平布置收集搅龙参数配合性调整。
2.3.3.1 提升搅龙倾角
根据《公路工程技术标准》[13],农村单车道宽度为3.5 m,农用车辆常见车箱高度H为1.5 m,宽度B为1.8 m,捡拾装置在工作过程中车与边沟边缘预留S=0.5 m安全距离,如图7a所示,此时对应提升搅龙倾角θ圆整为70°;当车辆与一侧边沟距离增大时,同样应与另一侧边沟保持0.5 m安全距离,如图7b所示,此时S'=1.2 m,对应提升搅龙倾角θ'圆整为50°。因此,提升搅龙倾角范围为50°~70°。
2.3.3.2 搅龙螺旋直径
搅龙螺旋直径根据式(13)作计算[12]。

式中:Q为输送量(t·h-1),本文初始设计输送量为5 t·h-1;K为物料特性系数,农家肥属于无磨琢性物料取K=0.0490[14];ρ为单位容积质量(t·m-3),ρ=0.80[15]。

图7 车载式农家肥捡拾装置工作状态Fig.7 Working condition schematic of in-vehicle collecting device with farmyard manure
提升搅龙倾斜角度越大,物料越难向上输送,因此选取倾角为70°时,作搅龙参数设计。根据本机构应用特点与物料性质,选取填充系数φ提升=0.32[16],倾斜系数C提升=0.58[16],经式(13)计算获得搅龙螺旋直径D为200.04 mm,将其圆整为200 mm。
2.3.3.3 提升搅龙螺距
提升搅龙螺距根据式(14)作计算[14]。

式中:s提升为提升搅龙螺距(m);ks为提升搅龙螺距与螺旋直径比值,与物料性质有关,通常取0.7~1.0,对于摩擦力系数较大物料,取值在0.7~0.8,对于流动相较好的易于流散物料,取最大值1,本文取ks=0.8。
计算得提升搅龙螺距s提升=160 mm。
2.3.3.4 搅龙轴直径
搅龙轴直径根据式(15)作计算[12,16]。

为保证螺旋轴较好刚性,取系数为0.3,则d为60 mm。
2.3.3.5 搅龙主轴转速
搅龙主轴转速由公式(16)得:

计算转速值为111.95 r·min-1。
2.3.3.6 收集搅龙螺距
水平收集与倾斜提升两段搅龙状态输送能力存在差异,为避免搅龙连接处发生堵塞,设计时收集搅龙螺距应小于提升搅龙螺距,如式(17)所示。

2.3.3.7 搅龙长度
运输时搅龙挂接在车厢上,工作时需根据沟渠深度,拖车高度调整搅龙位置达到收集目的。基于前述安装平台及作业环境,本文将收集搅龙长度设计为0.5 m,提升搅龙长度为2.5 m。
3 离散元仿真试验设计与分析
为探究分段式搅龙结构可行性及参数计算准确性,运用离散元仿真软件EDEM(Engineering Discrete Element Method)[17-19]模拟搅龙实际工作过程;应用Design-Expert 8.0软件设计仿真试验。根据预仿真分析,选取收集搅龙螺距、搅龙螺旋直径及搅龙主轴转速为仿真试验影响因素,以输送量及功耗作为响应指标,设计二次正交旋转组合仿真试验[26]。通过响应曲面图分析各因素对响应指标影响规律,建立目标函数,获得最佳参数。
3.1 模型建立
3.1.1 接触模型
本文使用离散元仿真分析软件EDEM对集送搅龙工作过程作仿真分析,考虑边沟内农家肥混有污泥及作物秸秆等物质,成分复杂且粘稠,使用Hertz-Mindlin with JKR模型,该模型是一个凝聚力接触模型,常用于模拟黏土等具有粘结性含湿性物料。通过参数匹配方法确定表面粘附能(Surface Energy)。综合考虑设置其全局变量[21-25]如表1所示。

表1 全局变量参数设置Table 1 Pre-treatment parameters setting
3.1.2 肥料颗粒模型建立
在仿真模型中,将颗粒简化为软球模型[26-27],创建球形农家肥颗粒体,参照土壤粒径设置农家肥颗粒体半径为3 mm[28-29],材料选取全局变量所设置农家肥颗粒并自动获取其余属性。颗粒类型选择随机分布。
3.1.3 搅龙模型
在 CATIA(Computer Aided Three-dimensional Interactive Application)软件中创建车载式农家肥捡拾装置三维模型,为便于分析计算,去除模型中与接触无关结构,将其存储为.stp格式导入EDEM中。将收集搅龙螺旋组件和提升搅龙螺旋组件设置为转动件,定义其材料和类型,分别设置旋转轴位置、方向和转动初速度与开始时间,将沟渠设置为固定件。设定搅龙前进速度为2.3 km·h-1[4,30],开始前进时间与搅龙转动开始时间相同。
3.1.4 颗粒工厂创建
创建虚拟颗粒工厂,动态生成农家肥颗粒,设定生成颗粒总数量2×106个,生成速率每秒5×105个,颗粒大小服从正态分布,使其均布在沟槽内,尺寸为长×宽×高:6 m×0.5 m×0.1 m。
3.1.5 其他参数设定
在仿真过程中,设置固定时间步长为Reyleigh(瑞丽)时间步长15%[31],数据保存间隔为0.02 s,网格设为最小颗粒尺寸2倍[32-33]。
3.1.6 后处理设置
在后处理Binning(方格设置)模块中,搅龙出料口处建立一个Grid bin group(网格状方格组),记录并实时显示进入其间农家肥质量,为后续输送量统计提供依据。后处理过程中截取图像如图8所示。

图8 后处理过程图像Fig.8 Screenshotsof post-processing
3.2 仿真试验设计
3.2.1 二次正交旋转组合设计
由前文理论分析及单因素预试验可知,搅龙螺旋直径,搅龙主轴转速,收集搅龙螺距对物料输送有重要影响。结合理论分析与预试验结果,设置各因素水平范围:搅龙螺旋直径175~225 mm,搅龙主轴转速100~120 r·min-1,收集搅龙螺距60~180 mm。各因素水平编码如表2所示。

表2 仿真试验因素水平及编码Table 2 Coded and levelsof simulation test factors
计算装置所产生总功耗,作为参数组合选取辅助响应指标。响应指标设定为输送量和功耗。分段式搅龙总功耗计算如公式(18)所示[12]。

式中,P总为分段式搅龙总功耗(kW);P收集为收集搅龙功耗(kW);P提升为提升搅龙功耗(kW);L收集为收集搅龙输送长度(0.5 m);L提升为提升搅龙输送水平投影长度(0.855 m);H为提升高度(2.35 m);Q为输送量(t·h-1);η止为考虑止推或径向轴承阻力系数(0.87);μ外物料与壳体间摩擦系数及与螺旋叶片表面摩擦系数平均值(0.6);k0为考虑物料内部颗粒摩擦及搅拌引起阻力系数(1.2);ω为物料阻力系数(9);k1为与填充系数有关系数(0.8);η收集为收集搅龙螺旋效率;η提升为提升搅龙螺旋效率。其中,η收集,η提升计算如式(19)所示:

式中,α收集为收集搅龙螺旋叶片平均升角(°);α提升为提升搅龙螺旋叶片平均升角(°);
其中α收集,α提升计算如式(20)所示[12]:
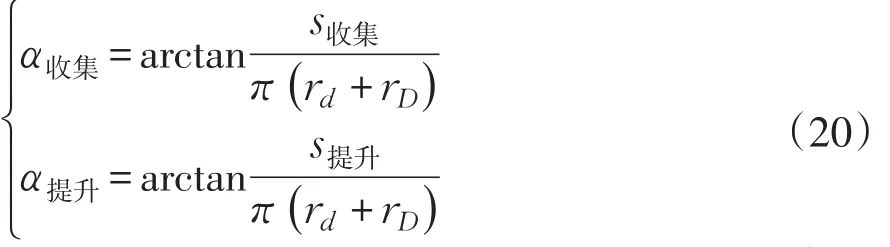
式中,rd为搅龙轴半径(m);rD为搅龙螺旋半径(m);s收集为收集搅龙螺距(m);s提升为提升搅龙螺距(m)。
仿真试验结果如表3所示。

表3 仿真试验结果Table3 Resultsof thesimulation experiments
3.2.2 仿真试验结果分析与回归数学模型建立
应用Design-Expert 8.0软件[34-37]对各因素作方差分析,如表4所示。
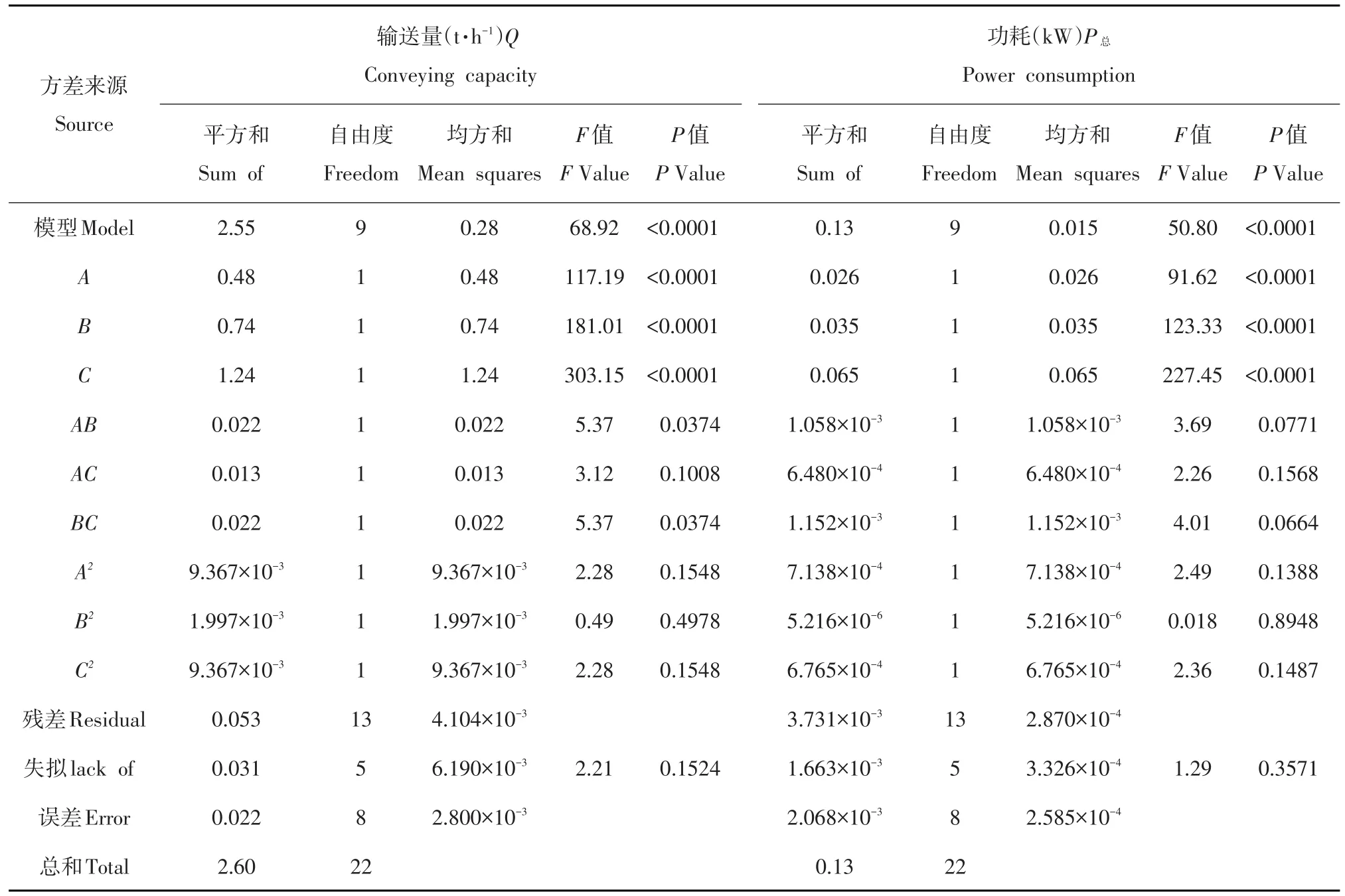
表4 方差分析Table4 Variance analysis
由表4可知,搅龙螺旋直径,搅龙主轴转速及收集搅龙螺距对输送量影响均极显著(P<0.01)且三因素对输送量影响依次为搅龙主轴转速>收集搅龙螺距>搅龙螺旋直径;收集搅龙螺距与搅龙主轴转速交互项(BC),搅龙螺旋直径与收集搅龙螺距交互项(AB)对输送量影响作用显著(0.01<P<0.05);搅龙螺旋直径与搅龙主轴转速交互项(AC),搅龙螺旋直径二次项A2,收集搅龙螺距二次项B2,搅龙主轴转速二次项C2对输送量影响不显著(P>0.1);整体模型极显著,失拟项不显著,模型拟合良好。
剔除不显著影响项,获得对于输送量回归方程如式(21)所示。

搅龙螺旋直径,搅龙主轴转速及收集搅龙螺距对功耗影响均极显著(P<0.01)且三因素对功耗影响依次为搅龙主轴转速>收集搅龙螺距>搅龙螺旋直径;搅龙螺旋直径与收集搅龙螺距交互项(AB),收集搅龙螺距与搅龙主轴转速交互项(BC)对功耗影响较显著(0.05<P<0.1),搅龙螺旋直径与搅龙主轴转速交互项(AC),搅龙螺旋直径二次项A2,收集搅龙螺距二次项B2,搅龙主轴转速二次项C2对功耗影响不显著(P>0.1);整体模型极显著,失拟项不显著,模型拟合良好。
剔除不显著影响项,获得对于功耗回归方程如式(22)所示。

3.2.3 响应曲面分析
各因素对输送量与功耗影响响应曲面见图9。

图9 各因素对输送量与功耗影响响应曲面图Fig.9 Responsesurface of every factor on conveying capacity and power consumption
3.2.3.1 各因素对输送量影响分析
当搅龙主轴转速为110 r·min-1时,收集搅龙螺距和搅龙螺旋直径对输送量影响如图9a所示。当搅龙螺旋直径一定时,输送量随收集搅龙螺距增加而变大;当收集搅龙螺距一定时,输送量随着搅龙螺旋直径增大而增大;当搅龙螺旋直径增大时,输送量随收集搅龙螺距增大,增长趋势变大;收集搅龙螺距对输送量影响大于搅龙螺旋直径对输送量影响;当收集搅龙螺距在90~150 mm,搅龙螺旋直径在187.5~212.5 mm时,输送量接近5 t· h-1。
当收集搅龙螺距为120 mm时,搅龙主轴转速与搅龙螺旋直径对输送量影响如图9b所示。当搅龙螺旋直径一定时,输送量随着搅龙主轴转速增大而增大;搅龙主轴转速对输送量影响大于搅龙螺旋直径对输送量影响;当搅龙主轴转速在105~115 r·min-1,螺旋直径在187.5~212.5 mm时,输送量接近5 t· h-1。
当搅龙螺旋直径为200 mm时,收集搅龙螺距与搅龙主轴转速对输送量影响如图9c所示。搅龙主轴转速对输送量影响大于收集搅龙螺距对输送量影响。
3.2.3.2 各因素对功耗影响分析
当搅龙主轴转速为110 r·min-1时,收集搅龙螺距和搅龙螺旋直径对功耗影响如图9d所示。当收集搅龙螺距一定时,搅龙螺旋直径越大,功耗越大;当搅龙螺旋直径一定时,收集搅龙螺距越大,功耗越大;当搅龙直径增加时,功耗随着收集搅龙螺距增大,增长趋势越来越明显;当收集搅龙螺距增加时,功耗随着搅龙螺旋直径增大,增长趋势越来越大;收集搅龙螺距对功耗影响大于搅龙螺旋直径对功耗影响。
当收集搅龙螺距为120 mm时,搅龙主轴转速和搅龙螺旋直径对功耗影响如图9e所示。当搅龙螺旋直径一定时,搅龙主轴转速越大,功耗越大;搅龙主轴转速对功耗影响大于搅龙螺旋直径对功耗影响。
当搅龙螺旋直径为200 mm时,搅龙主轴转速及收集搅龙螺距对功耗影响如图9f所示。搅龙主轴转速对功耗影响大于收集搅龙螺距对功耗影响。
3.2.4 参数优化
定义输送量为主要响应指标,功耗作为辅助响应指标。根据图9响应曲面分析,确定各参数最优取值域,确定目标函数,如式(23)所示。

选取输送量与初始定义量5 t·h-1相等且此时功耗最小最优参数组合,并满足各边界条件,最优参数组合:搅龙螺旋直径203.83 mm,收集搅龙螺距119.35 mm,搅龙主轴转速107.22 r·min-1,此时可信度为1,功耗为1.147 kW。根据螺旋标准[11-12,14]及工艺要求,对各参数作圆整,搅龙螺旋直径为200 mm,收集搅龙螺距为120 mm,搅龙主轴转速为107 r·min-1,并以该组参数作仿真验证计算输送量为4.94 t·h-1,与设计值误差为1.2%,满足要求,计算功耗值为1.118 kW。
4 样机试制与试验
加工样机并安装,试验样机采用电动机为动力,变频调速。样机及部分试验仪器参数如表5所示。样机及试验过程如图10所示。

表5 样机及试验仪器参数Table5 Parametersof prototypeand experiment instruments

图10 样机及试验Fig.10 Prototype and testing
根据设计背景及设计目标,试验为针对环境自然路面,砂土成分,略有起伏及坑洼。物料为自然堆放并发酵农家肥,含水率为43%,单位容积质量为0.8 t·m-3,按设计工况调整作业参数(车辆前进速度2.3 km·h-1,搅龙主轴转速107 r·min-1),重点观察装置工作过程及适用性,测量收集与输送量。样机试验表明,技术方案可行,实现设计功能。输送量五次试验均值为4.65 t·h-1。试验输送量误差由实际路面存在起伏与物料堆积状态等,以及理论计算与虚拟仿真差异形成,通过转速适当上调可达到设计要求。
5 结 论
a.由收集搅龙与提升搅龙组成串联式集送系统结构简单,满足收集并输送联合作业要求;快速拆装安装形式适合农村配套动力特点,低成本、操作便捷;收放机构及串联搅龙球形铰接提供复合仿形功能,保证装置对工作环境具有良好适应性。
b.回归方程分析表明,在仿真试验参数取值域内,影响装置输送量及功耗主次顺序为搅龙主轴转速,收集搅龙螺距、搅龙螺旋直径。
c.对于5 t·h-1设计目标,优化后集送搅龙结构及作业参数为:搅龙螺旋直径200 mm,提升搅龙螺距160 mm,收集搅龙螺距120 mm,搅龙主轴转速为100~120 r· min-1。
[1] 王振华,王德成,刘贵林,等.方草捆压捆机捡拾器参数设计[J]. 农业机械学报,2010,41(增):107-109.
[2] 王国权,余群,卜云龙,等.秸秆捡拾打捆机设计及捡拾器的动力学仿真[J].农业机械学报,2001,32(5):59-61.
[3] 王东伟,尚书旗,韩 坤.4HJL-2型花生捡拾摘果联合收获机的设计与试验[J].农业工程学报,2013,29(11):27-36.
[4] 衣淑娟.豆类自走式捡拾脱粒机的设计[J].机械设计与制造,2005(2):9-10.
[5] 石磊,吴崇友,梁苏宁,等.油菜分段收获齿带式捡拾器的设计与试验[J].中国农机化,2011(4):75-78,82.
[6]Loyon L.Overview of manure treatment in France[J].Waste Management,2017,61:516-520.
[7]Cuplin C.Farm machinery(11th edition)[M].London:Crosby Lockwood Staples,1986.
[8]Phipps L J.Mechanics in agriculture(Third edition)[M].Danville:The Interstate Printers and Publishing,1983.
[9] 朱凤芹.纽荷兰牧草与青贮机械[J].养殖技术顾问,2006(4):52-53.
[10] 袁天佐,陈清,李志国.国外两种牧草机械简介[J].农业机械,2004(4):65.
[11] 洪志育,林良明.连续运输机[M].北京:机械工业出版社,1982.
[12] 王鹰.连续输送机械设计手册[M].北京:中国铁道出版社,2001.
[13] 中建标公路委员会,公路工程技术标准(JTG B01-2014)[S].北京:人民交通出版社,2014.
[14] 蒋琼珠.连续运输机[M].北京:人民交通出版社,1986.
[15] 施继红.农家肥撒施机工作部件的试验研究[D].长春:吉林农业大学,2002.
[16] 贾朝斌.螺旋输送机参数设计及其优化方法研究[D].太原:太原理工大学,2015.
[17] 马征,李耀明,徐立章.农业工程领域颗粒运动研究综述[J].农业机械学报,2013,44(2):22-29.
[18] 王福林,尚家杰,刘宏新,等.EDEM颗粒体仿真技术在排种机构研究上的应用[J].东北农业大学学报,2013,44(2):110-114.
[19] 王希英,王金武,唐汉,等.勺式精量玉米排种器取种凹勺改进设计与试验[J].东北农业大学学报,2015,46(12):79-85.
[20] 袁志发,周静芋.试验设计与数据分析[M].北京:高等教育出版社,2000.
[21] Liedekerke P V,Tijskens E,Ramon H.Discrete element simulations of the influence of fertilizer physical properties on the spread pattern from spinning disc spreaders[J].Biosystems Engineering,2009,102(4):392-405.
[22] Lv H,Yu J,Fu H.Simulation of the operation of a fertilizer spreader based on anouter groove wheel using a discrete element method [J].Mathematical& Computer Modelling,2013,58(3-4):836-845.
[23] Shimizu Y,Cundall P A.Three-dimensional DEM simulations of bulk handling by screw conveyors[J].Journal of engineering mechanics,2001,127(9):864-872.
[24] 王金武,王奇,唐 汉,等.水稻秸秆深埋整秆还田装置设计与试验[J].农业机械学报,2015,46(9):112-117.
[25] 于群,钱立彬,于文静,等.开沟器工作阻力的离散元法仿真分析[J].农业机械学报.2009,40(6):53-57.
[26] 罗勇,龚晓南,吴瑞潜.颗粒流模拟和流体与颗粒相互作用分析[J].浙江大学学报:工学版,2007,41(11):1932-1936.
[27] 孙其诚,王光谦.颗粒物质力学导论[M].北京:科学出版社,2009.
[28] 黄玉祥,杭程光,苑梦婵,等.深松土壤扰动行为的离散元仿真与试验[J].农业机械学报,2016,47(7):80-88.
[29] 邵明安,王全九,黄明斌.土壤物理学[M].北京:高等教育出版社,2006.
[30] 许涛,沈永哲,高连兴,等.基于两段收获的弹齿式花生捡拾机构研究[J].农业机械学报,2016,47(3):90-97.
[32] Hou Q F,Dong K J,Yu A B.DEM study of the flow of cohesive particles in a screw feeder[J].Powder Technology,2014,256(2):529-539.
[33] Kretz D,Callau-Monje S,Hitschler M,et al.Discrete element method(DEM)simulation and validation of a screw feeder system[J].Powder Technology,2016,287:131-138.
[34]陈海涛,董冰哲,柴誉铎,等.秸秆纤维制取机配套强制喂料装置的优化设计及试验[J].东北农业大学学报,2017,48(7):83-90.
[35] 陈海涛,苗乃彪,董冰哲,等.D200型秸秆纤维制取机结构优化试验研究[J].东北农业大学学报,2015,46(7):90-94.
[36] 张微微,张永根,刘震,等.响应面法优化马铃薯渣固态发酵生产奶牛饲料工艺条件研究[J].东北农业大学学报,2013,44(12):113-118.
[37] 郭丽峰,刘宏新,贾儒,等.基于仿真与试验的可变型孔立式复合大豆种盘参数优化[J].东北农业大学学报,2016,47(3):64-71.
Design and experiment study on portable in-vehicle device of farmyard manure collecting/
LIU Hongxin,WANG Chen,WANG Jiaxing,FU Lulu
(School of Engineering,Northeast Agricultural University,Harbin,150030,China)
An in-vehicle collecting device which could be assembled and disassembled quickly was designed to solve the problem that the dung which was produced by livestock and poultry breeding was piled up on the road and ditches for a long time,which brought out a number of serious environmental pollution problems.Mechanism analysis and parameter optimization with its key part collecting and transporting auger were made.According to analyse of using environment features and the requirements of technology,basic parameters and structure could be confirmed by comprehensive material stress and motion analysis,threedimensional model and digital prototyping could be made by using CATIA(Computer Aided Threedimensional Interactive Application)software.The pitch of collecting auger,screw diameter of auger androtational speed of auger were chosen as simulation experiment factors,conveying capacity and power consumption were chosen as response indexes,a quadratic orthogonal rotation EDEM(Engineering Discrete Element Method)virtual simulation experiment was designed.The theoretical analysis and simulation results showed that for 5 t·h-1design index,the parameters of auger were as the followings:screw diameter of auger was 200 mm,the pitch of lifting auger was 160 mm,the pitch of collecting auger was 120 mm,rotational speed of auger main shaft was 107 r·min-1,and power consumption was 1.118 kW.The results of the prototype test showed that the overall technical scheme and the celerity assembly and disassembly form could meet the demand of manure,which also had good adaptability to the environment.The research provides an effective reference for the application and research.
agricultural machinery;livestock and poultry breeding;collecting of farmyard manure;invehicle;celerity disassembling and assembling;collecting and transporting auger
S224.2
A
1005-9369(2017)09-0059-13
时间 2017-10-20 12:50:39 [URL]http://kns.cnki.net/kcms/detail/23.1391.S.20171020.1250.002.
刘宏新,王晨,王佳兴,等.车载便携式农家肥捡拾装置设计与试验研究[J].东北农业大学学报,2017,48(9):59-71.
Liu Hongxin,Wang Chen,Wang Jiaxing,et al.Design and experiment study on portable in-vehicle device of farmyard manure collecting[J].Journal of Northeast Agricultural University,2017,48(9):59-71.(in Chinese with English abstract)
2017-09-12
公益性行业(农业)科研专项(201303011)
刘宏新(1971-),男,教授,博士生导师,研究方向为农业机械化技术与装备、数字化设计与数字资源管理、车辆工程。E-mail:Lcc98@neau.edu.cn