基于置信滤波的激光雷达多目标检测方法
2017-11-08孙学凯杨得钊
孙学凯, 王 丽, 杨得钊, 马 杰
(1. 华中科技大学, 湖北 武汉 430074; 2.上海无线电设备研究所, 上海 200090)
基于置信滤波的激光雷达多目标检测方法
孙学凯1, 王 丽2, 杨得钊2, 马 杰1
(1. 华中科技大学, 湖北 武汉 430074; 2.上海无线电设备研究所, 上海 200090)
针对激光雷达在复杂场景中检测多目标时所遇到的传感器本身数据抖动、目标相互遮挡导致目标检测准确率不高的问题,提出了一种基于置信滤波的多目标检测方法。本方法将Velodyne点云数据投影到地面,使用置信滤波方法将聚集区域边缘的不稳定栅格滤除,并将栅格分为动态与静态两类。最后使用改进的DBSCAN聚类算法,对动、静态栅格进行聚类处理,得出运动目标与静态目标。实验结果表明:该方法能够较大地提高对复杂场景下多目标的检测准确度,是一种高效的激光雷达多目标检测方法。
置信滤波; DBSCAN算法; 目标检测
0 引言
激光成像雷达的波束较窄、方向性好,在一定程度上可以穿透遮蔽物获取目标信息,较之传统的二维成像传感器能更好地反映场景中目标的位置信息。在智能交通、精确打击等自动目标检测领域中有很好的应用。但在复杂场景下,抖动噪声、数据缺失等因素的干扰给目标检测提出了挑战,特别在学校、车站、主要交通路口等行人车辆流量较大的场景中,目标众多且遮挡频繁。
本文针对地面交通场景,使用Velodyne-64线激光雷达基于置信滤波的多目标检测方法,对十字路口周围的多个目标进行检测,并提取出多个目标的准确位置信息,是一种完整高效的基于激光雷达的多目标检测方法。
1 点云数据处理
1.1点云数据栅格化
将激光雷达点云数据栅格化的方法有很多[1-3],比较成熟的三维激光传感器数据栅格化表示方法有均值高度栅格表示法和最大最小高度差值栅格表示法两种[4],本文方法采用最大最小值高度差值栅格表示法对Velodyne雷达的点云数据进行栅格化处理。
在原始的点云图像中,点云数据降维表示为XY平面的栅格地图,地图中的每个栅格的属性信息为栅格内点云数据的最大高度与最小高度的差值Δd,若Δd大于等于预先设定的阈值D,则栅格被标记为目标栅格;Δd小于D,栅格被标记为非目标栅格。栅格的属性信息T(x)表示为
(1)
图1为校园十字路口处的原始点云图像,图2是经过最大最小高度差值栅格化后的目标占用栅格图,其中白色部分为提取出的目标栅格,黑色部分为非目标栅格。
图1 原始点云图像
图2 栅格化后的点云图像
1.2基于置信滤波的目标栅格区分
根据1.1中方法,可以得到目标栅格。对于得到的目标栅格,一方面由于Velodyne雷达在旋转过程中存在的微小抖动问题,会使处于目标聚集区域边缘的栅格处于抖动状态,即在目标栅格和非目标栅格之间不断的变化,这对后续的聚类操作以及运动目标与静态目标的区分影响很大;另一方面为了检测运动目标与静态目标,如果直接对得到的目标栅格进行聚类操作,很可能会在运动目标经过静态目标时,将运动目标与静态目标聚集为一个目标,对动静态目标划分造成影响。
为解决上述问题,本方法引入置信滤波理论,对得到的原始目标栅格进行滤波,同时将目标栅格划分为静态栅格与动态栅格两类。方法描述如下:
a) 每个栅格引入连续存在置信参数E,初始化E=0;
b) 对后续每一帧的该位置栅格,如果其为目标栅格,则E+1,否则E=0;
c) 当E大于给定的阈值Et时,该栅格为静态栅格,否则为动态栅格。
考虑遮挡情况,当某一运动目标经过静态目标时,会对其产生遮挡,导致原来的静态栅格被检测为非目标栅格,对静态栅格的检测稳定性造成影响。对此,解决方法如下:
a) 对已经检测出的静态栅格引入连续消失置信参数D,初始化D=0;
b) 对后续每一帧的该位置栅格,如果被检测为非目标栅格,则D+1,否则D=0;
c) 当D达到给定阈值Dt时,令该栅格的连续存在置信参数E=0,并令D=0,栅格更新为非目标栅格,否则该栅格依旧为静态栅格。
d) 如果在D未达到给定阈值的连续帧中,该栅格再次被检测为目标栅格,则D=0,T不变。
方法流程,如图3所示。
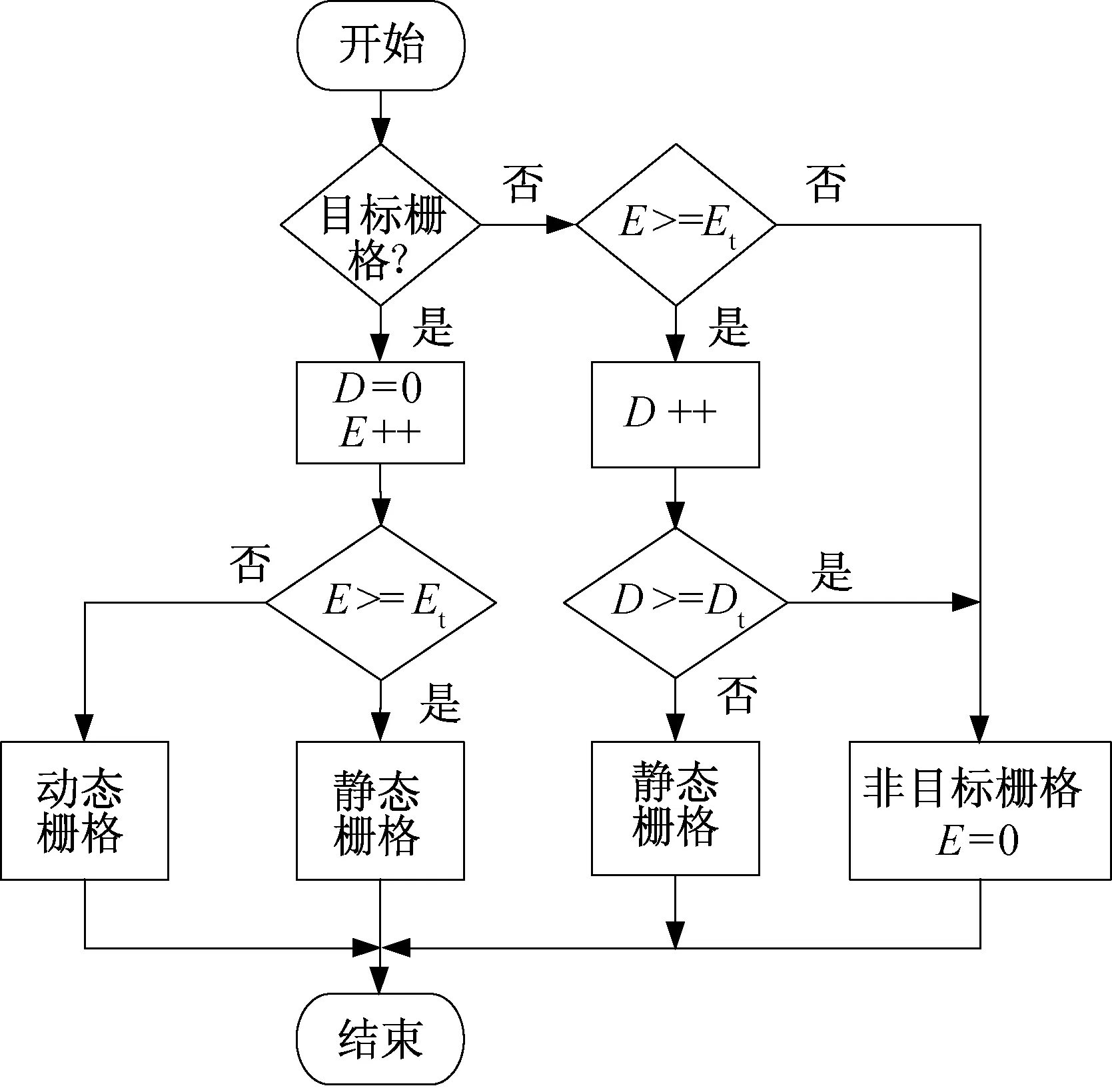
图3 栅格置信滤波方法流程图
使用以上置信滤波方法,得到的栅格区分效果如图4所示。
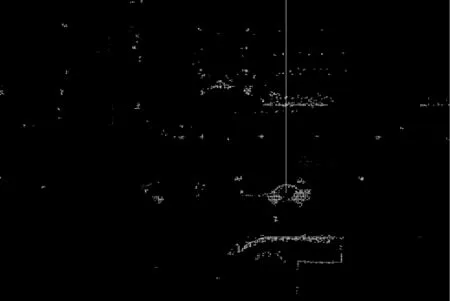
图4 置信滤波的栅格区分效果图
1.3目标聚类
经过上述步骤,可以得出稳定的静态与动态目标栅格,分别对静态与动态栅格进行聚类操作,可以提取出静态目标和运动目标。本方法根据激光雷达的成像特点,使用了一种基于空间密度的改进DBSCAN聚类方法[5-8]。
对原算法的改进主要有两点:
a) 使用核心栅格Eps搜索范围内X、Y正负半轴上最远的4个特征栅格来代替对Eps内所有栅格的搜索,提高算法的时间效率;
b) 由于激光的数据密度会随着扫描距离的变化而变化,原始DBSCAN算法的Eps值不能动态改变。
改进方法为根据目标栅格距雷达的实际距离动态地改变DBSCAN算法的搜索半径Eps。
(2)
式中:α为聚类半径系数;Xi,Yi为目标栅格的中心位置在雷达坐标系中的坐标;θ为激光雷达的水平角度分辨率;L为聚类区域步长。
该算法的关键步骤为如何判断某一栅格是否为核心栅格,其判断方法为
(3)
式中:NEps(Ci)表示以栅格Ci为中心;Eps半径范围内目标栅格的个数;minPts表示当前栅格为核心栅格时,其NEps(Ci)的最小值。改进算法的流程如图5所示。
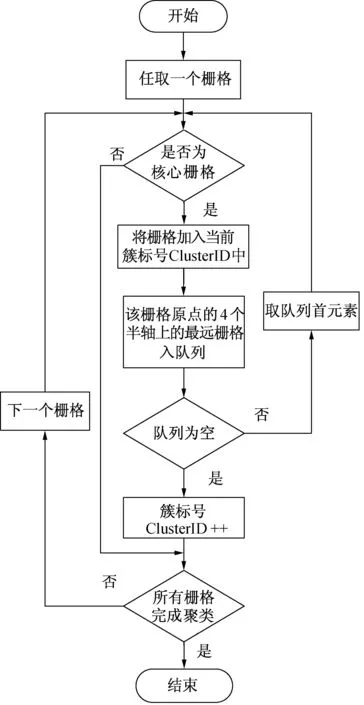
图5 改进DBSCAN算法流程图
经过聚类操作之后可得到,聚类效果如图6所示。

图6 目标检测效果图
2 实验结果
2.1实验场景
在校园十字路口内对过往的汽车、电动车以及行人进行检测,实验场景如图7所示。

图7 实验场景图
2.2结果
Velodyne雷达的最远探测距离为100 m左右,距离越远点云数目越少,受环境的影响越大。为评价本文提出方法的检测效果以及其是否满足实时性的要求。对校园十字路口处以激光雷达为中心,半径40 m、60 m、80 m范围内的多个运动目标进行检测,对若干个目标位置的真实度进行了测量,并统计算法的平均运行时间。结果如表1、表2所示。
结果显示,使用本方法可以很好地对复杂路面环境下的多个目标进行检测,整体方法运行时间在200 ms以内,而雷达的扫描频率为5 Hz,能够满足实时性的要求。在激光雷达的常用探测距离内检测准确度很高,但在激光雷达的远距离探测范围内,检测率还是有所下降,这是由于远处物体的成像点数较少,且远处物体受遮挡的情况更为复杂等综合因素所导致的,这也是本方法后续改进过程中所需要完善的,但对目标具体位置的提取非常准确,位置提取误差占实际距离的百分比大约在2%左右,这也体现了激光雷达较之二维图像传感器的特有优势。
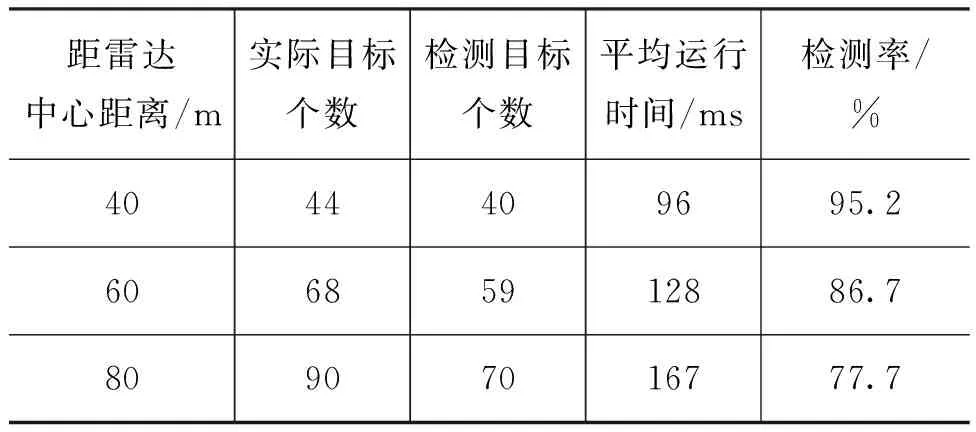
表1 多运动目标检测结果
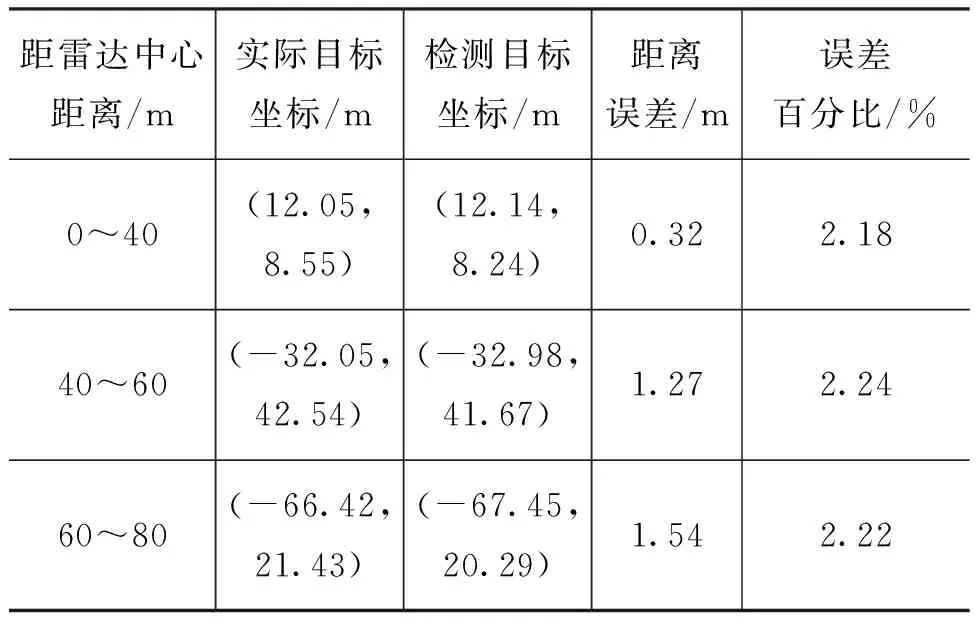
表2 单目标位置提取结果
3 结束语
本文提出了一种基于置信滤波的激光雷达多目标检测方法,通过在校园内十字路口处的多次实验,验证了本方法可以很好地解决在复杂环境中检测多目标时所遇到传感器本身数据抖动、目标相互遮挡所导致的目标检测准确率不高问题,证实了本方法的可靠性。下一步工作,将准备在动基座上测试本算法。
[1] Dorai C, Wang G, Jain AK, et al. Registration and Integration of Multiple Object Views for 3D Model Construction [J].IEEE Transactions on Pattern Analysis and Machine Intelligence, 1998, 20(1): 83-89.
[2] Himmelsbach M, Muller A, Luttel T, et al. LIDAR-based 3D Object Perception [C]//Proceedings of 1st International Workshop on Cognition for Technical Systems. 2008: 152-158.
[3] 杨飞.基于三维激光雷达的运动目标实时检测与跟踪 [D].杭州:浙江大学, 2012: 15-18.
[4] 谌彤童. 三维激光雷达在自主车环境感知中的应用研究 [D].长沙:国防科学技术大学, 2011: 20-23.
[5] 冯少荣,肖文俊.DBSCAN聚类算法的研究与改进[J]. 中国矿业大学学报, 2008, 27(1): 105-111.
[6] 王桂芝,王广亮. 改进的快速DBSCAN算法 [J]. 计算机应用,2009, 29(9): 2505-2508.
[7] 刘军,艾力,马晓松.一种改进的DBSCAN聚类算法的研究与应用[J]. 交通与计算机, 2008, 26(3): 60-64.
[8] BIRANT D, KUT A. ST-DBSCAN: An Algorithm for Clustering Spatial-temporal Data [J]. Data & Knowledge Engineering, 2007, 60: 208-221.
Multi-targetDetectionMethodofLaserRadarBasedonConfidenceFiltering
SUNXue-kai1,WANGLi2,YANGDe-zhao2,MAJie1
(1. Huazhong University of Science and Technology,Wuhan Hubei 430074, China; 2.Shanghai Radio Equipment Research Institute, Shanghai 200090, China)
Aiming at the questions happened when laser radar detecting multi-target in the complex environment that the date of laser sensor itself jittered and the accuracy of the target detection result caused by the mutual occlusion of the target is not high, a multi-target detection method based on the confidence filter is presented. The method projects the Velodyne point data to the ground, using the theory of the confidence filtering to filter the unstable grids in the edge of the point clusters, then dividing the grids into two types: dynamic and static. Finally, an improved DBSCAN clustering algorithm is used to cluster the dynamic and static grids separately to obtain the dynamic target and the static target. The experiment results show that the proposed method can improve the detection accuracy of multi-targets under complex terrain scenes. It is an efficient laser radar-based multi-target detection method.
confidence filtering; DBSCAN algorithm; target detection
1671-0576(2017)02-0025-05
2017-01-06
2016上海航天科技创新基金资助项目;2015航天支撑技术基金资助项目。
孙学凯(1992-),男,硕士,主要从事三维目标检测及仿真技术研究;王 丽(1981-),女,高级工程师,主要从事激光雷达信息处理技术研究。
TN957.51
A