单AGV“货到人”拣选模式仿真系统的设计与实现
2017-11-07
(北京物资学院 北京 101149)
单AGV“货到人”拣选模式仿真系统的设计与实现
从灿苏永强
(北京物资学院北京101149)
“货到人”拣选模式是当前仓储应用的研究热点,本文设计并实现了该模式下的单AGV仿真系统,以便进行更深入的研究,同时,也为研究相关问题的读者提供参考。
“货到人”拣选模式;AGV;仿真系统
“货到人”拣选模式仿真系统由布局编辑器与拣选模拟器两部分组成。其中布局编辑器由用户根据其具体的实际情况或研究问题对拣选系统的布局进行设置,在合理设置之后,便可运行拣选模拟器进行AGV模拟作业。模拟器会随机选择一个货架、一个人工拣选台作为目标货架、目标拣选台,并将该货架位置信息发送给闲置状态的AGV,AGV便可根据自身位置与目标位置进行A*算法路劲规划,并得到最短可行路径,进而取货。AGV抵达目标货架位置并取货后,便可再次根据自身位置与目标拣选台位置进行A*算法路劲规划,从而抵达目标拣选台,并进行人工拣选。拣选完成后,AGV再抬着货架返回目标货架初始位置,并卸下货架。至此,单次模拟拣选作业结束。
一、布局编辑器的设计与实现
布局编辑器由一个对话框与一个编辑界面组成,如图1、图2所示。其中对话框用于输入布局长宽,编辑界面用于在已生成长宽的布局里进一步设置货架位置、拣选台位置、障碍物位置。
当长宽设置超过编辑界面主窗口默认大小时,在主窗口右侧、下侧会自动显示滚动条。用户可通过挪动滚动条浏览或编辑整个布局。编辑主窗口右侧是可拖拽工具栏菜单(ToolBar),用户可根据自身需要拖拽其至编辑界面以外。工具栏菜单上展示的是仓储布局里的基本单元,可个性化定制,在这里,仅使用三种必备基本单元,由上到下,分别是货架,障碍物,拣选台。
如图3所示,工具栏菜单可进行如下操作:
(一)选中基本单元:由鼠标左键单击工具栏上目标图标实现。成功选中后,鼠标的图标变为所选图标。
(二)添加基本单元:选中目标后,在所需位置上单击鼠标左键进行添加。添加成功后,单击位置显示已添加基本单元。
(三)撤销选中状态:选中目标后,单击鼠标右键实现撤销选中状态。
(四)删除已添加基本单元:撤销选中状态返回默认鼠标后,在所需位置上单击鼠标右键删除已添加基本单元。
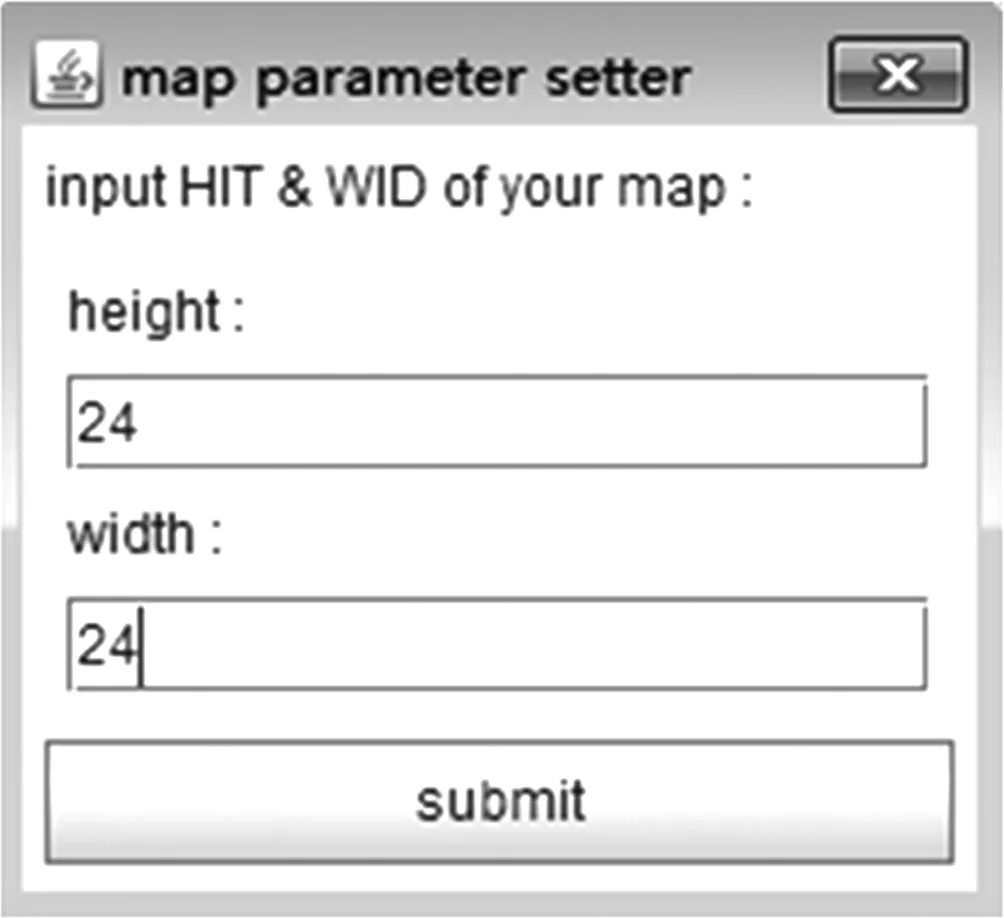
图1 对话框
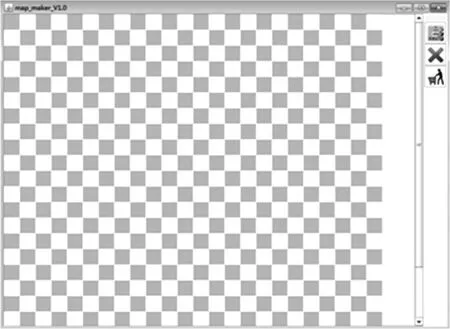
图2 编辑主界面
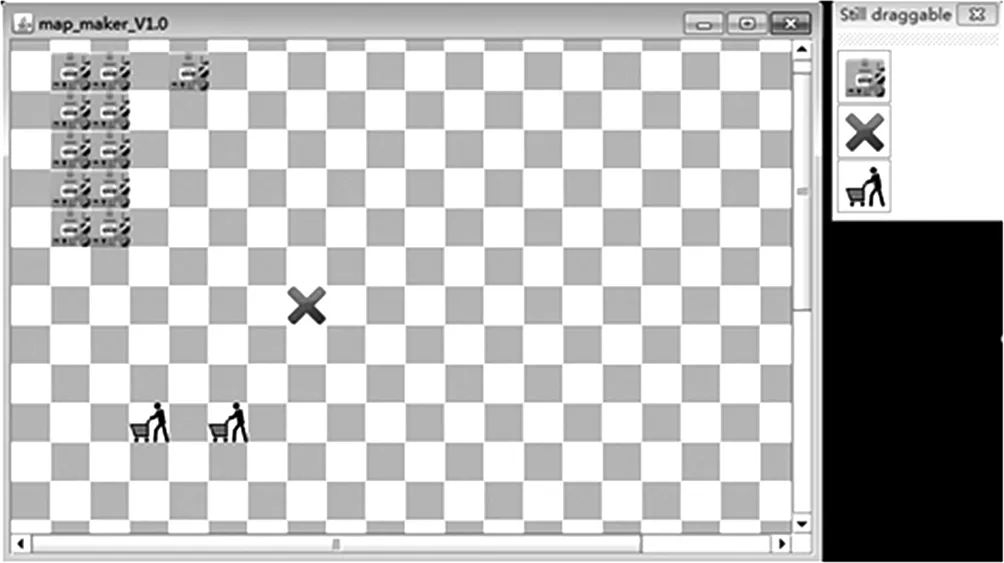
图3 使用示意图
二、拣选模拟器的设计与实现
布局编辑器通过鼠标、键盘等输入设备进行编辑,并同时更新显示。当编辑完成后,布局信息将以一个二维数组的形式保存于内存中。拣选模拟器在得到该矩阵后,再进行拣选模拟。首先,拣选模拟器会根据随机数发生器,生成两个随机数,该随机数分别代表一个已有货架、一个已有拣选台。此时,模拟器再根据后台设置的AGV位置,进行A*算法路径规划。计算所得为AGV位置至货架位置的最短路径、货架位置至拣选台位置的最短路径、拣选台位置返回货架位置的最短路径,并将路径信息封装为链表返回给程序显示端。程序显示端将在AGV移动线程里重画AGV图标。
为避免图标重画造成的闪烁问题,AGV图标应当以小像素为移动单位,并在每次移动后,进行适当的线程休眠,以达到更好的视觉效果。
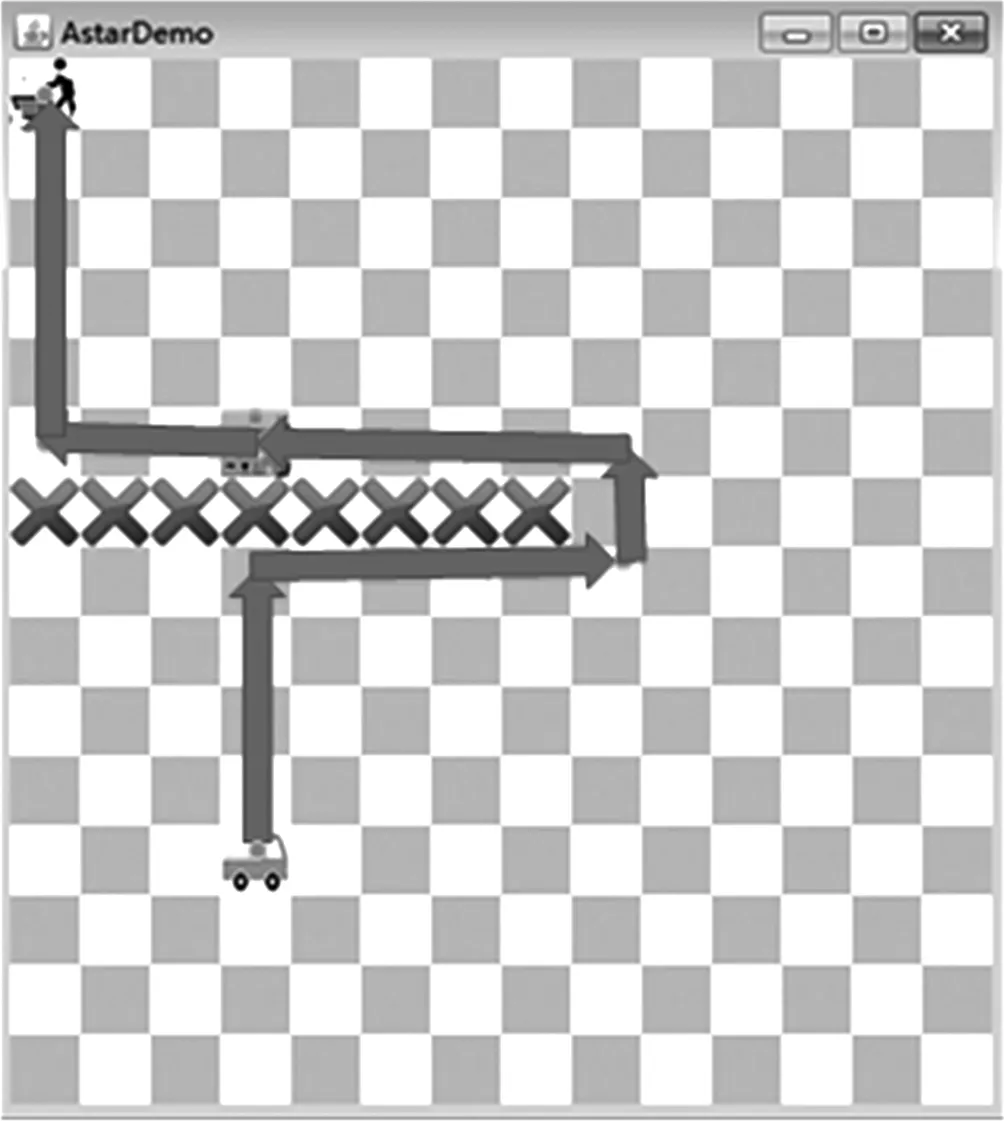
一个简单的测试用例如图4、图5所示,在一个14x14的布局上,以左上角为原点,AGV默认位置为(3,11),在得到目标货架位置(3,5),目标拣选台位置(0,0)后,即可根据A星算法得到无障碍路径,从而进行模拟拣选作业。
[1]Komma V R,Jain P K,Mehta N K.Agent-based simulation of a shop floor controller using hybrid communication Protocols[J].International Journal of Simulation Modelling,2007,6(4):206-217.
[2]Stefan Walter.OpenTCS 3.2 User manual[M].Fraunhofer IML,2016.
从灿(1992-),男,汉族,安徽马鞍山市人,硕士研究生在读,工程硕士,北京物资学院,研究方向智能物流系统;苏永强(1992-),男,汉族,河北石家庄市人,硕士研究生在读,管理学硕士,北京物资学院,研究方向模型与算法优化。
