永磁悬浮磁力驱动装置的零功率特性优化设计*
2017-11-07金俊杰徐方超金嘉琦
孙 凤,周 冉,金俊杰,李 强,徐方超,韦 伟,金嘉琦
(沈阳工业大学 机械工程学院,沈阳 110870)
1001-2265(2017)10-0027-03
10.13462/j.cnki.mmtamt.2017.10.006
2016-11-09;
2016-12-30
国家自然科学基金(51105257,51310105025);辽宁省高等学校杰出青年学者成长计划 (LQJ2014012);中国博士后科学基金(2015M571327);十二五国家科技支撑计划(2015BAH47F02)
孙凤(1978—),男,辽宁阜新人,沈阳工业大学副教授,博士,研究方向为磁悬浮技术与数控技术,(E-mail)sunfeng@sdu.edu,cn。
永磁悬浮磁力驱动装置的零功率特性优化设计*
孙 凤,周 冉,金俊杰,李 强,徐方超,韦 伟,金嘉琦
(沈阳工业大学 机械工程学院,沈阳 110870)
根据永磁悬浮磁力驱动装置的磁势周期性变化规律,结合其特有的结构,在保证提供的悬浮力满足实验条件的基础上,以装置中电机轴上的扭矩趋于零作为优化设计的目的,对该永磁悬浮磁力驱动装置进行结构上的优化设计,建立了优化后装置的仿真模型,并采用有限元方法计算不同优化条件下,磁力驱动装置的零功率特性及驱动力特性。对比分析结果表明:经过两次优化设计后的装置与原装置相比,负载转矩明显减小,已经达到了零功率特性优化设计的要求。
零功率;永磁悬浮;有限元分析
0 引言
永磁悬浮技术具有结构紧凑、磁密度大、不发热的特点,目前应用范围很广,如永磁电机、永磁悬浮装置等[1-3]。与此同时在无尘领域永磁悬浮技术也逐渐被应用,为了达到节约能源、降低成本的目的,一种永磁悬浮无尘传送系统被提出[4],该系统是通过改变系统中径向磁化的盘状永磁铁的旋转角度来改变通过悬浮物的磁通量[5-6],进而改变悬浮力的大小,目前这种永磁悬浮磁力驱动装置解决了传统无尘传送设备由于机械接触、摩擦、润滑油等对工作环境的污染。此外,该装置由于其结构特点,理论上具有零功率特性,但运用有限元软件进行仿真分析[7-10],观察磁场分布情况,分析力学特性,研究发现由于周期性磁势的影响,导致电机轴上出现了周期性扭矩,从而使输出效率降低,因此该装置实际上具有准零功率特性。
本文在原装置具有准零功率特性的基础上进行了永磁悬浮磁力驱动装置的零功率特性优化设计。经过分析影响装置零功率的因素,提出优化结构,建立三维有限元分析模型,通过有限元软件分析,进行瞬态磁场模拟仿真计算,根据计算的数据来不断调整装置的结构。此装置旨在减小电机轴上的扭矩,使之趋于零,从而提高其工作效率,在零功率输出状态下带动永磁铁实现永磁悬浮磁力驱动,达到降低功耗的效果。
1 驱动装置的结构及准零功率特性
1.1 装置结构
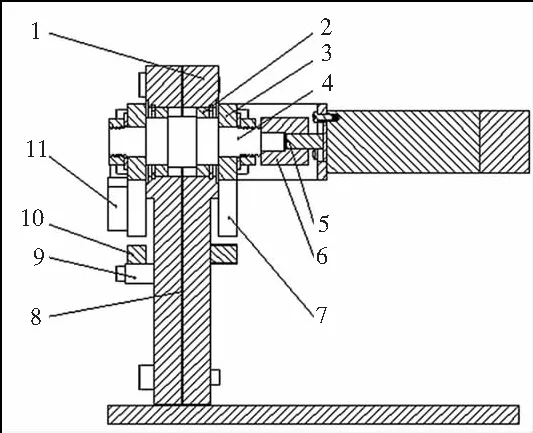
如图1为原装置的结构图,该原型主要包括盘式永磁体,包含齿轮减速器和编码器的伺服电机,一对相对的“F”形坡莫合金,悬浮物和一个涡流传感器。实验所用的永磁体为径向磁化的盘形永磁体,磁体的直径为30mm,厚度为10mm。磁体后面的伺服电机驱动磁体旋转,编码器测量磁体的旋转角度。导磁体是坡莫合金材料,这样使导磁率更大,效果更好。悬浮物体的位置由放置在下方的涡电流传感器测量。
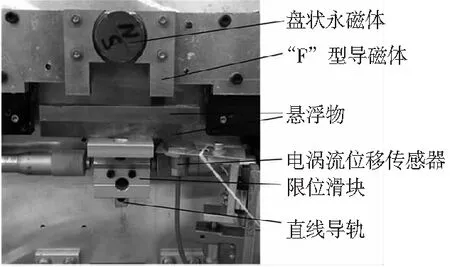
图1 原型装置结构图
图2为在不同大小间隙条件下的原型装置所产生的吸引力与旋转角度的关系。悬浮力根据永磁体旋转角度的变化而变化,并且在约90°和270°具有2个最大值,在约0°和180°具有2个近似零点。与此同时,悬浮力的大小随间隙的增大而减小。
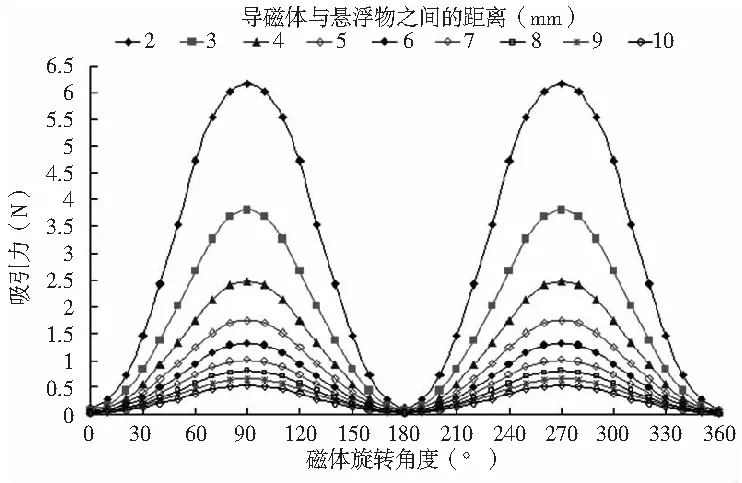
图2 原装置吸引力实验结果
1.2 准零功率特性分析
从原装置的结构和工作原理中可以得出永磁体是通过经过导磁体磁感线多少来提供悬浮力的大小,悬浮物的重力由“F”形导磁体直接传至框架上,永磁体和电机不承受悬浮物重力,原则上悬浮物的重量变化不会影响电机的能耗。但是由于该装置的独特结构和原理,使得永磁体在旋转过程中磁势对永磁体产生了负载扭矩,从而为了抵制这部分扭矩,电机需要输入很小的电流,所以原装置具有准零功率特性。
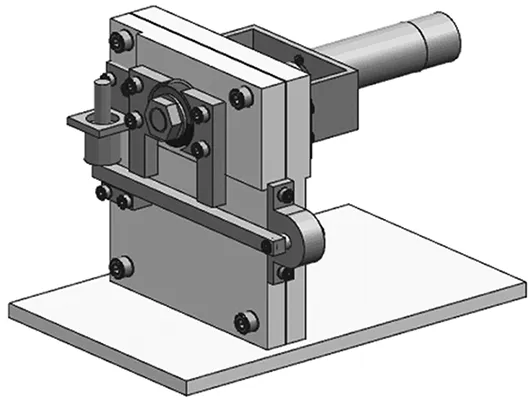
为了检查磁势对永磁体的影响,当改变永磁体的旋转角度和“F”形导磁体与悬浮物体之间的气隙时,用应变仪测量永磁体的旋转扭矩。在旋转电动机和永磁体之间的连接器侧粘贴用于测定转矩的两个应变计,在与悬浮力的测定实验相同的条件下测定旋转转矩。气隙长度从2mm变化到8mm。 测量装置如图3所示。旋转扭矩的测量结果如图4所示。结果表明旋转扭矩的数值随着气隙增加而减小。

图3 扭矩测量实验装置
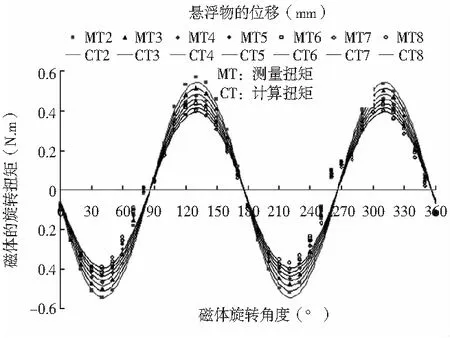
图4 原装置旋转扭矩实验结果
2 优化结构提出
为了解决原装置的准零功率特性,本文提出了一种改进结构,目的是使永磁体上的负载扭矩接近于零,从而使装置具有零功率特性。本试验装置设计过程中借鉴了原装置结构,由图4所示结果可知,扭矩与磁铁回转角度之间的关系基本呈180°为一个周期,90°相对对称。根据其电机轴上扭矩的特点,提出了采用支撑板两侧对称的结构,在支撑板的两侧同一轴上安装两个径向磁化的永磁磁环,磁极相互错开90°安装,使两永磁体与两对“F”形导磁体之间的扭矩相互抵消,以消除电机的驱动功耗。
该装置结构如图5所示,包括实验台主支撑板、电机支架、隔磁板、伺服电机、刚性联轴器、主轴、电涡流传感器、2个径向磁化的永磁磁环、4块“F”形导磁体、悬浮物、轴承座和限位块;永磁磁环通过六角螺母、垫片和轴肩固定在主轴上,主轴通过刚性联轴器与伺服电机相连,永磁磁环的两侧各安放一个导磁体;在两个铝制支撑板中间加一个隔磁板;在导磁体的下方放置悬浮物,同时前面悬浮物的一端通过轴承固定,另一端摆动,并且下方放置一个限位块,后面放置的悬浮物固定在支撑板上;悬浮物的上方设置一个电涡流传感器。 这种对称结构可以更好地避免不必要的影响因素,尽量排除外界因素的干扰,使实验和有限元仿真结果更加的准确。
(a)装置三维模型图
(b)装置剖视图
3 优化结构仿真分析
3.1 有限元仿真模型
依据所研究的问题,对改进的永磁悬浮磁力驱动装置有限元模型做出如下假设:忽略装置漏磁;忽略摩擦对装置的影响。
如图6所示是导入分析软件的有限元模型。图6a为根据原装置结构所建立的有限元模型图。图6b为在原装置的基础上进行了优化,在支承板两端呈对称式分布,两个径向磁化的永磁磁环,磁极相互错开90°安放。图6c在图6b的基础上又进行了优化,在两个永磁体之间加了一个隔磁板,隔绝两个永磁体间的相互影响。
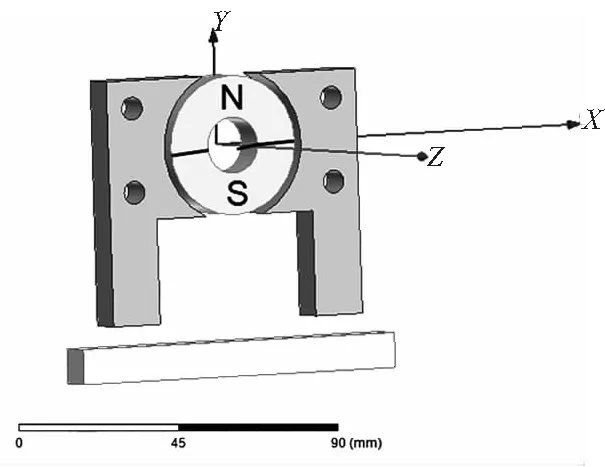
(a)原结构有限元模型图
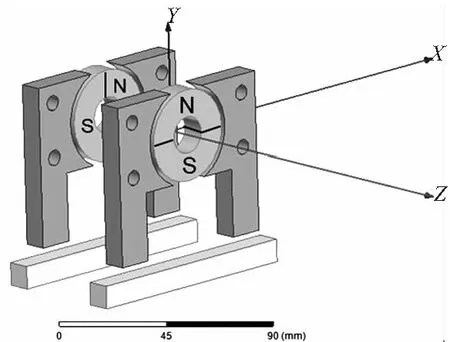
(b)一次优化后有限元模型图
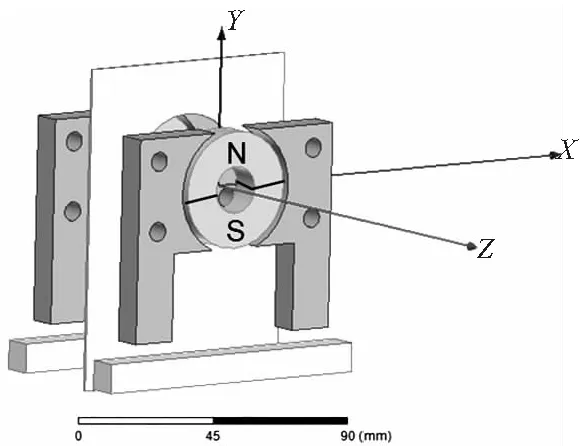
(c)二次优化后有限元模型图图6 有限元仿真模型
3.2 仿真分析条件
把优化装置的简化模型导入到Ansoft仿真软件里进行分析,永磁磁环的直径φ=40mm,选用NdFeB30,两块永磁磁环之间的距离为d=38mm;“F”形导磁体采用的是导磁率较高的坡莫合金材料,选用的型号为1J85;中间加了1mm厚的隔磁板,以此来消除两个永磁磁环之间的相互影响,其材料为铁;悬浮物的位置放在“F”形导磁体的下方6mm处,永磁体与“F”形导磁体之间的距离为2mm。对三种模型进行仿真,仿真速度为5°/s,总的仿真时间为72s。
3.3 分析结果对比
为了验证两次优化的效果,对三种不同结构的模型进行仿真结果对比分析,负载扭矩有限元仿真结果如图7所示。
第一次优化后装置的永磁铁所受的负载扭矩与原结构做的对比,可以看出电机主轴所受的负载扭矩,其呈正弦波变化,原装置最大扭矩达到了260N·m,优化后的效果明显,最大扭矩为122N·m,负载扭矩明显减小,但是没有达到理想的优化结果。第二次优化后装置的永磁铁所受的负载扭矩与第一次优化后装置做的对比,可以明显的看出电机主轴所受的最大扭矩已经减少到了20N·m,已经基本达到了零功率特性的优化设计。

图7 电机轴负载扭矩对比图
在进行负载扭矩仿真的同时,也验证了优化装置对悬浮力的影响,悬浮力有限元仿真结果如图8所示。第一次优化后装置的悬浮物所受的悬浮力与原装置做的对比,可以看出悬浮物所受的悬浮力,原装置最大悬浮力达到了19N,但是优化后悬浮力减小了,最大悬浮力约为10N。第二次优化后装置的悬浮物所受的悬浮力与第一次优化做的对比,可以看出悬浮物所受的悬浮力,第二次优化后悬浮力减小了,最大悬浮力约为6N。同时在第一次优化后图像的相位发生了明显改变,通过第二次优化后又恢复到原结构的相位,可以看出悬浮力相位的改变是由两永磁体之间相互影响而产生。
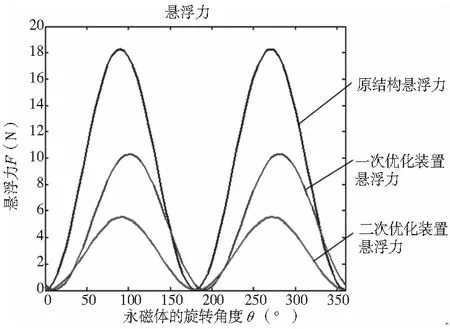
图8 悬浮物悬浮力对比图
经过仿真结果分析可以看出,再加上一个永磁体可以有效地减小电机轴上的扭矩大小,但是没有达到预期的目的,只是减小了大约一半;第二次优化说明了在两个永磁铁运动过程中,会相互干扰,影响各自的运动,当加入隔磁板后,可以有效地阻隔两个永磁铁之间的相互作用,最后使电机轴上的扭矩最大到20mN·m,可以近似忽略掉,优化后的永磁悬浮磁力驱动装置符合零功率特性设计,但是在此基础上装置所提供的悬浮力随之变小。二次优化后装置所提供的悬浮力已经满足设计要求,但在接下来的工作中继续改进装置提高悬浮力。
4 结论
本文对永磁悬浮磁力驱动装置进行结构优化设计,对不同优化设计的装置进行仿真,分析其零功率特性。研究结果表明:
(1)经过分析原装置的磁势变化和磁场分布,确定了对原装置的核心部分采用对称结构,通过有限元分析软件对优化结构进行性能分析,结果显示其负载扭矩达到了一定的优化效果。
(2)通过对其负载扭矩进行分析得出,一次优化后装置中放置的两个永磁体对整个装置的磁场分布产生了重要的影响,最终确定加入隔磁板的二次优化装置具有零功率特性,满足预期的设计要求。由于仿真过程中忽略磁漏和运动阻尼,所以仿真结果与实际数据间会有一定的误差产生,与此同时,在零功率优化的基础上装置结构正在继续改进,以提高其装置的悬浮力。
[1] 余莉,刘晓青,谢红飞,等. 飞轮储能用高速永磁无刷直流电机的设计[J]. 组合机床与自动化加工技术, 2015(2): 47-54.
[2] 秦伟,范瑜,朱熙,等. 永磁电动式磁悬浮装置的研究[J]. 电机与控制学报, 2011, 15(7): 77-81.
[3] 孙凤,王亚刚,李东生,等. 悬挂式永磁悬浮系统的悬浮特性研究[J]. 组合机床与自动化加工技术, 2012(11): 25-28.
[4] 金俊杰,段振云,孙凤,等. 永磁悬浮无尘传送系统的悬浮特性及解耦控制仿真分析[J]. 中国机械工程, 2016, 27(4): 518-525.
[5] Sun Feng, Oka Koichi. Development of Noncontact Suspension Mechanism Using Flux Path Control Disk Magnet Rotation[J]. Transactions of the Japan Society of Mechanical Engineers, 2010, 76(771): 2916-2922.
[6] Sun Feng, Oka Koichi, Saibara Yuuta. Magnetic Suspension System by Flux Path Control Using Rotary Actuator[J]. International Journal of Applied Electromagnetics and Mechanics, 2010, 33: 769-776.
[7] 张琪,黄苏融,丁烜明,等. 独立磁路混合励磁电机的多领域仿真分析[J]. 机械工程学报,2010, 46(6): 8-15.
[8] 刘伟,佟强,郑永利,等. 基于Ansoft的永磁调速器仿真研究[J]. 化工自动化及仪表, 2014, 42(4): 426-429.
[9] 张海龙,张坚,孟庆涛,等. 基于Ansoft的永磁悬浮直线导轨平台的设计及磁力分析[J]. 轴承,2014(5): 12-15,18.
[10] 王晗,李敏浩,陈新,等. 基于Ansoft15.0等效磁路理论应用仿真与实验[J]. 实验技术与管理, 2014, 31(1): 91-93,97.
DesignonZero-powerPerformanceofaMagneticDrivingDeviceUsingPermanentMagneticSuspension
SUN Feng, ZHOU Ran, JIN Jun-jie, LI Qiang, XU Fang-chao, WEI Wei, JIN Jia-qi
(School of Mechanical Engineering, Shenyang University of Technology, Shenyang 110870, China)
The magnetic driving device using permanent magnetic suspension has unique structure, which leads to produce the regularity of the magnetic potential. Based on the assumption that the levitation force satisfies the experimental conditions, the goal of the optimization design is that the torque on the motor shaft tends to zero. In order to reduce the load torque on the motor shaft, to improve its working efficiency, to reduce the power consumption effect, zero power permanent magnet suspension system with flux path control is carried out, and the simulation model of the optimized device is established in this paper. The zero power performance and driving force performance of the magnetic device are analyzed by finite element method, and by analyzing the movement and the forces of the device, dynamic model and spatial expression of the device are established. In order to study the dynamic response of the system under disturbances and verify the reliability and robustness of the system, the system is controlled by cascade control. The inner loop adopts PD regulator, and the outer loop adopts PID regulator. Simulation analysis show that the load torque is obviously reduced compared with the original device, new device has reached the requirement of zero power performance optimization design, and the system can be stably suspended after a brief adjustment under disturbances.
zero power; permanent magnetic suspension; finite element analysis
TH166;TG506
A
(编辑李秀敏)
