基于自适应技术的结构参数与输入同步反演
2017-11-07穆腾飞
穆腾飞, 周 丽
(1.中国商用飞机有限责任公司上海飞机设计研究院 上海,201210)(2.南京航空航天大学机械结构力学及控制国家重点实验室 南京,210016)
10.16450/j.cnki.issn.1004-6801.2017.05.030
基于自适应技术的结构参数与输入同步反演
穆腾飞1, 周 丽3
(1.中国商用飞机有限责任公司上海飞机设计研究院 上海,201210)(2.南京航空航天大学机械结构力学及控制国家重点实验室 南京,210016)
发展一种基于遗传优化算法的自适应追踪技术,结合输入未知条件下的二次误差平方和方法,利用事件中的加速度响应数据实现结构参数与输入的同步反演,判断并追踪结构损伤,包括损伤发生的时间、位置和程度。三自由度迟滞非线性系统数值仿真结果表明,该方法能够精确有效地追踪结构参数的变化,并同步反演结构的未知输入。此外,对三自由度基础隔振结构模型进行了多工况实验研究。结果表明,所发展方法能够实时有效地追踪结构时变物理参数、反演结构未知基底激励,进而精准地获取结构的损伤信息。
结构健康监测; 参数识别; 二次误差平方和方法; 自适应追踪; 未知输入
引 言
系统辨识及损伤检测技术是结构健康监测领域的一个重要分支,传统的系统辨识及损伤检测技术是基于输入输出均已知的情况下,对时不变系统参数及损伤进行识别。然而,在实际工程应用中,许多外部输入是难以测量甚至无法测量的,故结构参数与输入的复合反演技术得以发展,但该类技术仍难以应用于真实的工程结构[1]。
在结构参数与输入同步反演领域,诸多方法得到了发展,如ILS-UI法[2]和混合识别方法[3]等。然而,目前所发展的此类方法仍面临着所需测量点较多、难以得到无条件稳定收敛的解析递归解、复杂迟滞非线性系统的适用性弱和噪声鲁棒性弱等挑战;此外,当结构参数随时间而改变时,即结构发生损伤时,这些方法实时追踪结构参数变化的能力稍显不足。为了实现结构时变参数的追踪,可变追踪技术被提出,该技术通过经验准则调整识别算法中增益矩阵的对角元素,但却难以捕捉到结构参数的突变[4]。近期,一种创新的自适应追踪技术得到了发展以解决上述问题,仿真研究证明该项技术在EKF-UI[5]和SNLSE-UI[6]等方法上的可行性,然而,该技术在计算自适应因子矩阵初值过程中可能会出现复数,这仍有待改进。
本项研究发展一种基于遗传优化算法的自适应追踪技术,该技术避免了自适应因子矩阵初值的计算,并结合最新推导的输入未知条件下的二次误差平方和方法(quadratic sum-squares error with unknown inputs,简称QSSE-UI),利用事件中的加速度响应实现结构时变物理参数与输入的同步反演,进而追踪结构损伤,包括损伤发生的时间、位置和程度。三自由度迟滞非线性系统数值仿真结果表明,该方法能够有效地追踪结构参数的变化及识别结构未知输入。此外,对三自由度基础隔振结构模型进行实验研究,实时同步反演结构时变物理参数与未知激励,实验结果表明所发展方法的准确性。
1 自适应QSSE-UI算法
在未知输入条件下,m自由度的非线性结构运动方程可表示为

η*f*(t)+ηf(t)
(1)
[f1(t),f2(t),…,fs(t)]T为已知激励向量;θ=[θ1,θ2,…,θn]T为未知参数向量。
dX(t)/dt=g(X,θ,f*,f)+w(t)
(2)
其中:w(t)为模型噪声向量。
系统的离散观测向量可表示为
(3)
其中:yk+1为t=(k+1)Δt时刻的观测向量;vk+1为测量噪声向量。
观测值yk+1和理论值h之间的误差平方和可表示为
(4)


(5)
(6)
其中,
(7)
(8)
(9)

(10)
其中,Kθ,k+1为增益矩阵。
(11)
(I+Kθ,kHk)(ΛkPθ,k-1Λk)
(12)
上述即为自适应QSSE-UI算法[8]的求解。
2 自适应追踪技术
自适应因子矩阵Λk+1可在当前测量数据的基础上通过求解约束优化问题确定,令
(13)
其中:γk+1为m维预测误差向量。
(14)


(15)
其中:s为采样数,文中采用s=60。
在自适应追踪过程中,为了准确地捕捉结构参数变化的过程,本研究采用遗传优化算法[9]来确定自适应因子矩阵Λk+1的最优解,即将Λk+1的求解过程转化为一个基于遗传优化算法的约束优化问题,即在满足式(17)的约束条件下,最小化式(16)中的目标函数。此处最优化问题可以描述为
(16)
(17)
其中:δ为一个很小的正常数,本项研究中取δ=10-6。
3 仿 真
考虑一个受白噪声作用的三自由度迟滞非线性剪切型结构,其运动方程可表示为
(18)
(19)



在白噪声激励下,由自适应QSSE-UI方法对三自由度迟滞非线性剪切型结构的参数及未知输入识别结果可知:参数识别值与真实值相吻合,精度较高,误差均在1%以内,且收敛速度较快;当结构参数发生变化时,自适应追踪技术可以快速准确地追踪结构参数的变化;未知激励识别结果与所加载的白噪声激励相一致。
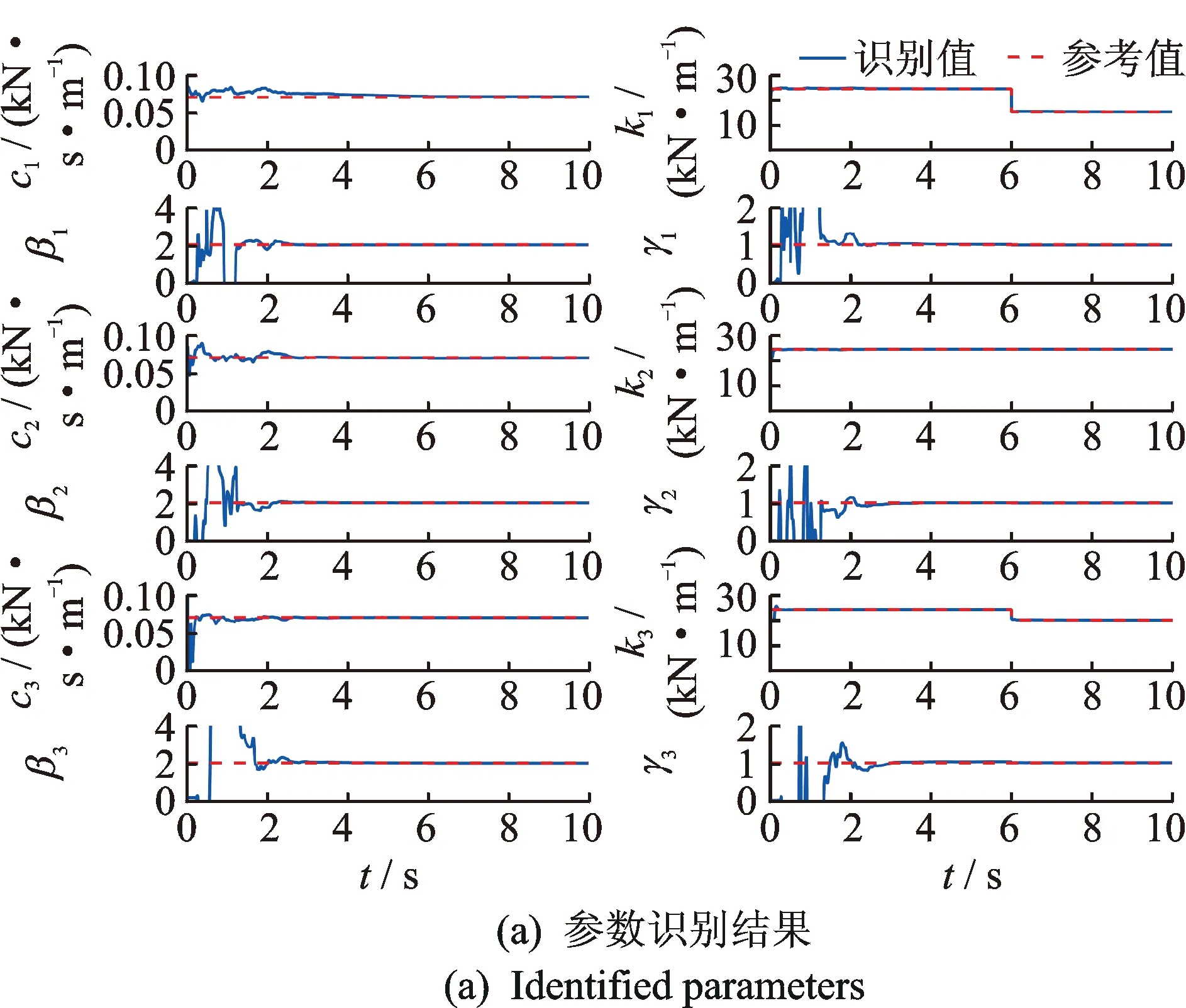
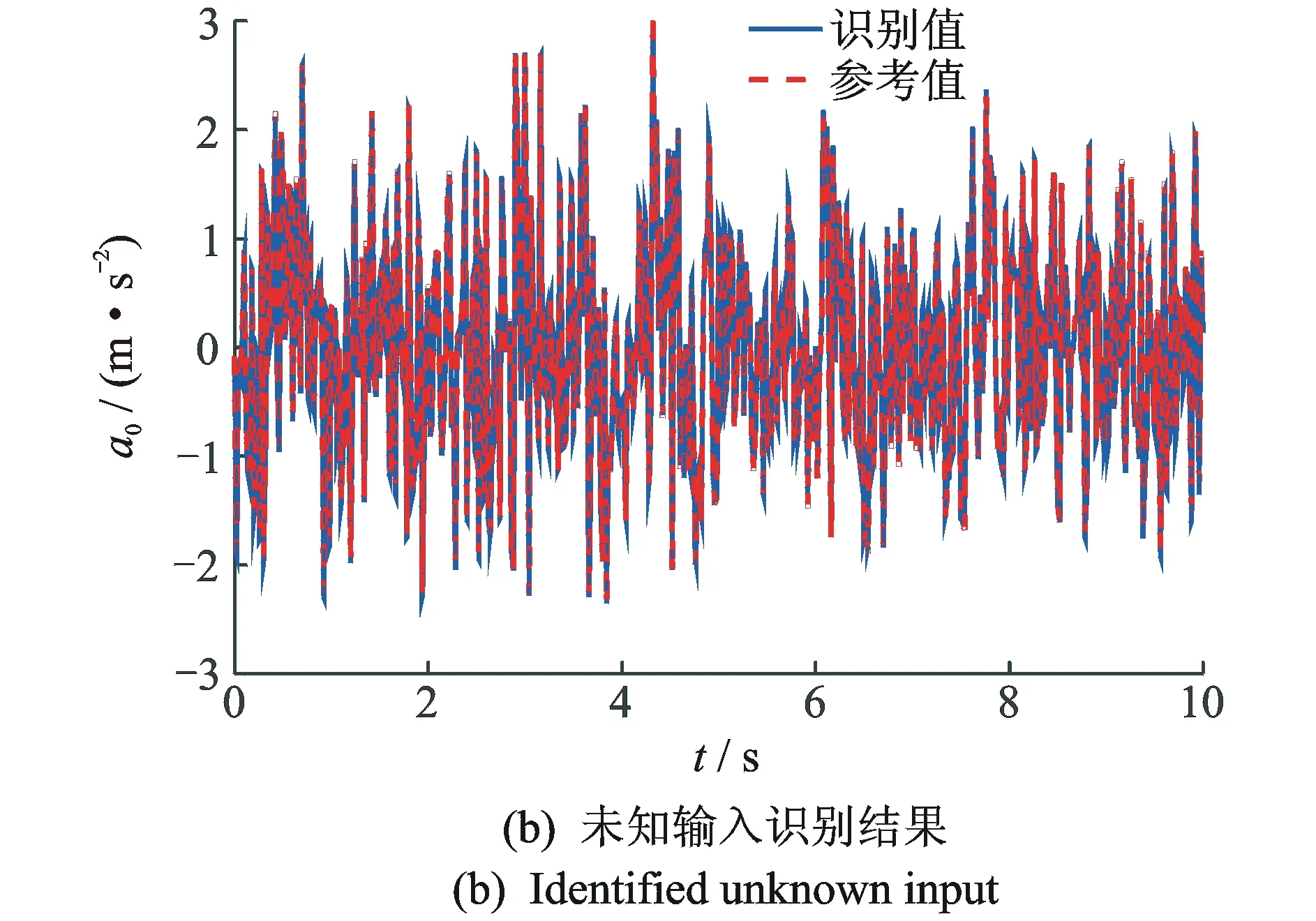
图1 仿真识别结果Fig.1 Simulation identified results
4 实 验
4.1 实验装置
实验模型为一个三自由度基础隔振结构模型,其由一个三自由度剪切型框架(上层结构)安装在GZN110型叠层橡胶隔振支座组(隔振层)上。上层结构尺寸为400 mm×300 mm×1 035 mm,质量m2=54.5 kg,m3=48.5 kg,m4=24.5 kg;隔振层尺寸为600 mm×500 mm×315 mm,质量m1=255.5 kg,其参数、性能及相关试验测试结果详见文献[10]。实验中,采用一套可在线改变结构刚度的装置——刚度元件装置(stiffness element device,简称SED),以模拟结构在实验振动过程中的损伤[5]。实验装置如图2所示。
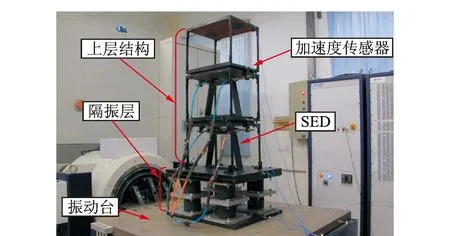
图2 实验装置图Fig.2 Experimental set-up
本项实验将模型固定在ETS GT1200M振动台上,通过UCON VT-9008振动控制器实现典型路谱信号基础激励。在基础、隔振层及上层结构上分别安装PCB 3701G3FA3G型加速度传感器,由NI PXI4472B信号采集卡实现信号采集,测量系统的加速度响应,其中基础加速度响应用来和自适应QSSE-UI方法识别得到的未知输入进行比较,判断自适应QSSE-UI方法用于结构未知输入识别的可行性和准确性。实验中所有信号的采样频率均为1 000 Hz。
4.2 理论模型
本项研究采用广泛应用于非线性建模的Bouc-Wen模型描述隔振层的动力学特性[10]。基础隔振结构的运动方程可写为
(20)
RT(x1,z,t)=αk1x1+(1-α)k1z
(21)
(22)
隔振层的非线性回复力RT(x1,z,t)采用式(21)和(22)所示的Bouc-Wen模型表述,其中:α为系统线性与非线性刚度的比值;A,β和γ为模型参数;n为模型阶数。根据已有的实验结果及研究成果,对于本项研究所使用的隔振层可采用简化Bouc-Wen模型,即取A=1,α=0和n=2作为定值,进而识别迟滞非线性参数β和γ,其中,β=0.5和γ=0.5作为参考值[10]。
4.3 实验验证
通过预实验得到实验模型的频率,其前4阶固有频率分别为1.650,2.356,6.941和10.024 Hz,将其视为4自由度剪切梁模型,根据有限元法得到模型由下至上4个自由度刚度分别为50.9,45.9,46.1和55.4 kN/m。这组有限元分析结果在本项研究中将作为参考值,与自适应QSSE-UI法的识别结果作比较,评价该方法的准确性。在振动实验过程中,分别考虑两种典型实验工况对本方法进行实验验证,实验研究结果如下。
4.3.1 工况1
基础隔振结构模型受El Centro典型路谱信号激励(滤波后频带[1.5~5] Hz,能量分布均匀),第2层的SED提供有效刚度约为7.5 kN/m,则第2层刚度变为53.4 kN/m,第3层的SED提供有效刚度约为4.5 kN/m,则第3层刚度变为50.6 kN/m。在实验过程中,结构振动到t=15 s时,同时排出第2层和第3层SED中的压缩空气,模拟上层结构刚度突变,则第2层的刚度从53.4 kN/m降低到45.9 kN/m,第3层的刚度从50.6 kN/m降低到46.1 kN/m,其他层刚度保持不变。在El Centro信号激励下,测得的每个自由度的绝对加速度响应ai如图3所示。
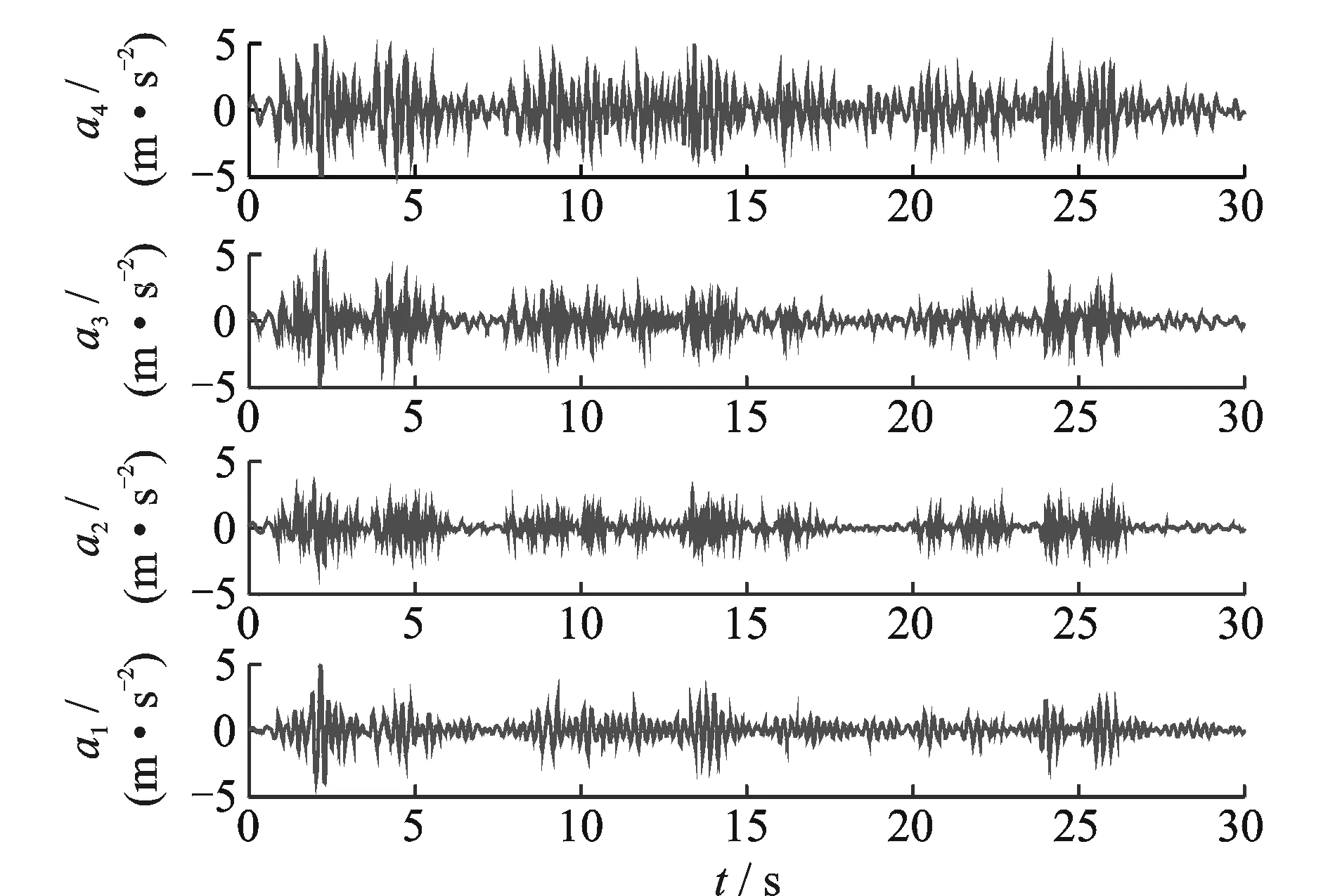
图3 测得的加速度响应(工况1)Fig.3 Measured acceleration responses (case 1)

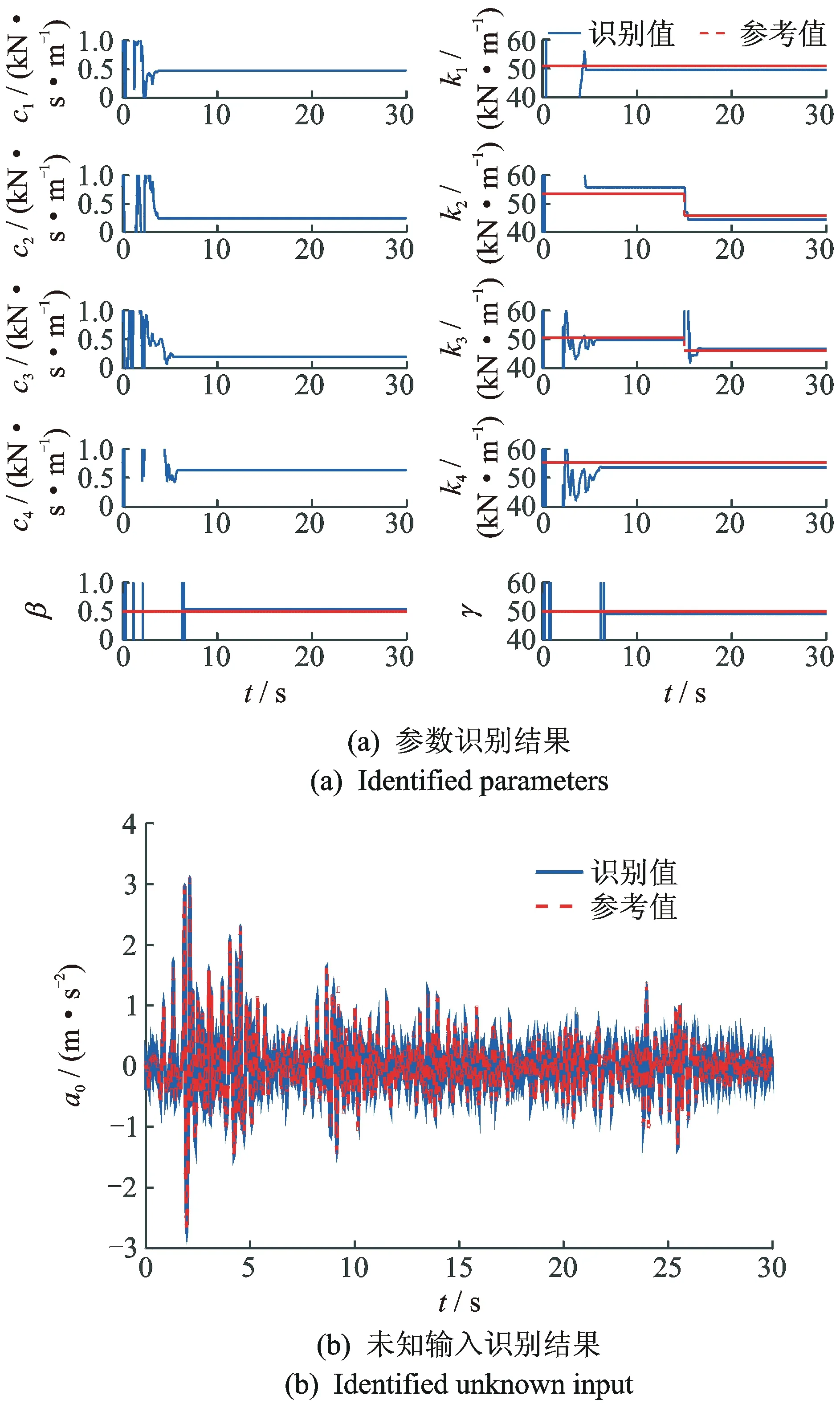
图4 实验识别结果(工况1)Fig.4 Experimental identified results (Case 1)
由工况1识别结果可知:刚度的识别精度较好,通常与有限元参考值的误差在4%以下,迟滞非线性参数的识别精度亦可以满足工程需求,这些误差主要由于实验中噪声和算法初始参数设置不够精准等因素所导致。由图4(a)可知,初始阶段,算法收敛到真实值需要基于二次误差平方和最小化的递推收敛过程,此外,当刚度突变时,由于模型产生局部刚度变化,自适应时变参数追踪过程启动,从初始刚度值收敛到刚度突降后剩余刚度值需要一个实时自适应收敛过程。总体而言,该算法的收敛速度较快,当结构发生损伤时,可以实时快速准确地追踪结构参数的变化;未知激励识别结果与传感器测得的结果相一致,能够有效地实现在线的未知输入反演。
4.3.2 工况2
基础隔振结构模型受Kobe信号激励(滤波后频带[1.8~3] Hz,短持时高能量),第2层和第3层SED所提供的有效刚度与工况1所提供的相同。在实验过程中,结构振动到t=12 s时,排出第3层的压缩空气,则第3层刚度从50.6 kN/m降低到46.1 kN/m;结构振动到t=20 s时,排出第2层的压缩空气,则第2层刚度从53.4 kN/m降低到45.9 kN/m,其他层刚度保持不变。在Kobe信号激励下,测得的每个自由度的绝对加速度响应ai如图5所示。

图5 测得的加速度响应(工况2)Fig.5 Measured acceleration responses (Case 2)
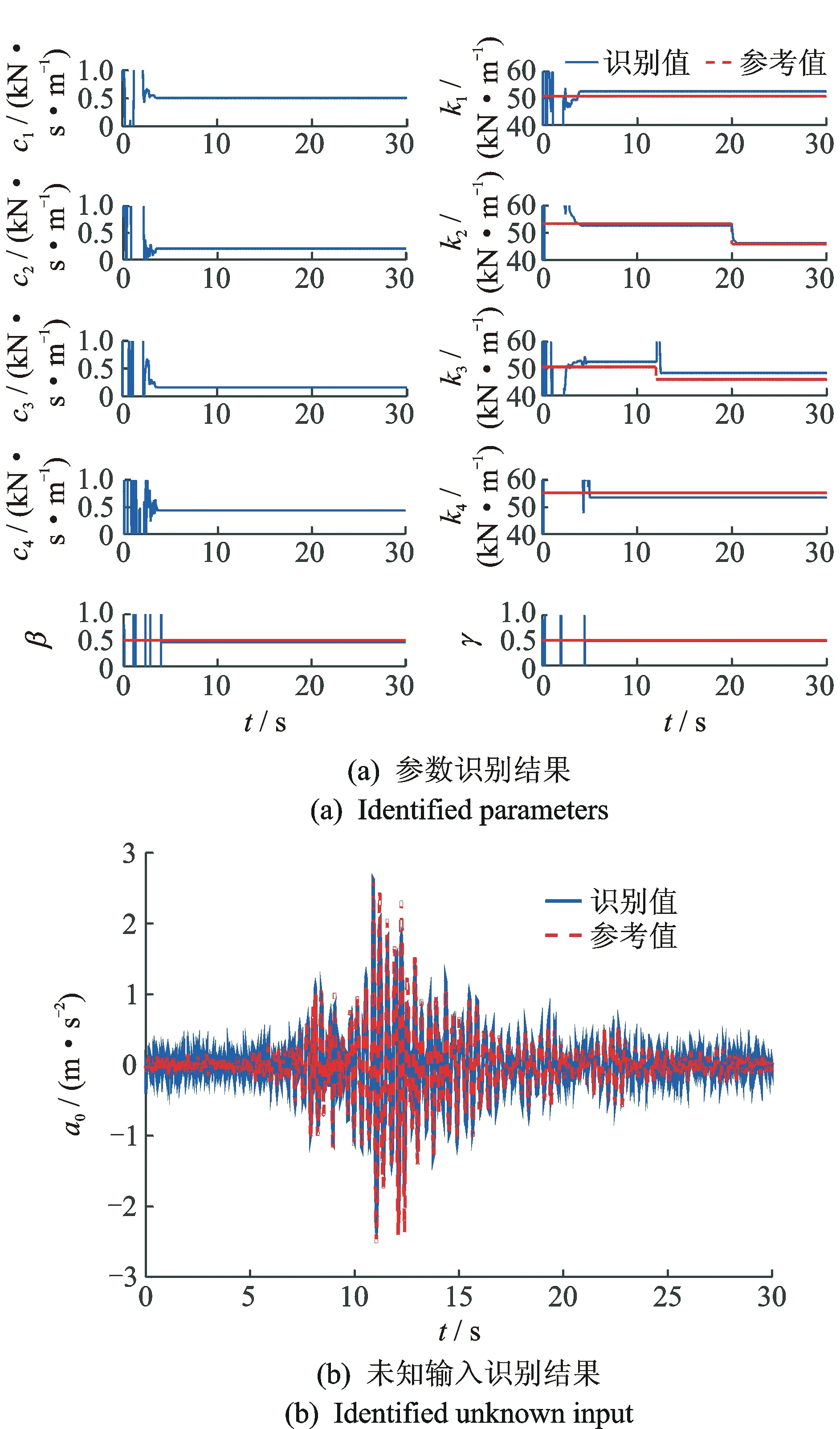
图6 实验识别结果(工况2)Fig.6 Experimental identified results (case 2)
由工况2的识别结果可知:刚度及迟滞非线性参数识别值与参考值相一致,误差均在5%以内,且参数识别结果与工况1中的识别结果相吻合;对不同于工况1中的损伤情况,该算法也可以有效地追踪结构参数变化;本工况下的未知输入识别结果与传感器测得结果一致,综合分析两种工况中未知输入的识别结果可知,未知输入识别结果仅在信号较大峰值处会有一些微小的峰值误差,这主要由于在识别未知输入过程中信号噪声和算法的参数设置还不够精准所导致。总体而言,该算法能够有效地识别未知输入信息,满足工程需求。
5 结 论
1) 通过三自由度迟滞非线性系统仿真研究与三自由度基础隔振结构模型实验研究,验证了所发展算法同步复合反演结构参数与未知输入的可行性与有效性。
2) 多工况在线仿真和实验研究结果表明,所发展方法能够实时准确地监测结构损伤,具有较强的自适应损伤追踪能力。
3) 在仅测量输出加速度响应信号作为算法输入的情况下,结果的精度较高且收敛速度较快,使该算法拥有广阔的工程应用前景。
[1] Humar J, Bagchi A, Xu H. Performance of vibration-based techniques for the identification of structural damage [J]. Structural Health Monitoring, 2006, 5(3): 215-241.
[2] Ling X, Haldar A. Element level system identification with unknown input with rayleigh damping [J]. Journal of Engineering Mechanics, 2004, 130(8): 877-885.
[3] Zhao Xin, Xu Youlin, Li Jie, et al. Hybrid identification method for multi-story buildings with unknown ground motion: theory [J]. Journal of Sound and Vibration, 2006, 291(1): 215-239.
[4] Smyth A W, Masri S F, Kosmatopoulos E B, et al. Development of adaptive modeling techniques for non-linear hysteretic systems [J]. International Journal of Non-Linear Mechanics, 2002, 37(8): 1435-1451.
[5] 周丽, 吴新亚, 尹强, 等. 基于自适应卡尔曼滤波方法的结构损伤识别实验研 [J]. 振动工程学报, 2008, 21(2): 197-202.
Zhou Li, Wu Xinya, Yin Qiang, et al. Experimental study of an adaptive extended kalman filter for structural damage identification [J]. Journal of Vibration Engineering, 2008, 21(2): 197-202. (in Chinese)
[6] Yang J N, Huang Hongwei. Sequential non-linear least-square estimation for damage identification of structures with unknown inputs and unknown outputs [J]. International Journal of Non-linear Mechanics, 2007, 42(5): 789-801.
[7] Huang Hongwei, Yang J N, Zhou Li. Adaptive quadratic sum‐squares error with unknown inputs for damage identification of structures [J]. Structural Control and Health Monitoring, 2010, 17(4): 404-426.
[8] Huang Hongwei, Yang J N, Zhou Li. Comparison of various structural damage tracking techniques based on experimental data [J]. Smart Structures and Systems, 2010, 9(6): 1057-1076.
[9] 尹强, 周丽. 基于遗传优化最小二乘算法的结构损伤识别 [J]. 振动与冲击, 2010, 29(8): 155-160.
Yin Qiang, Zhou Li. Structural damage identification based on GA optimized least square estimation [J]. Journal of Vibration and Shock, 2010, 29(8): 155-160. (in Chinese)
[10] Yin Qiang, Zhou Li, Wang Xinmin. Parameter identification of hysteretic rubber-bearing based on sequential nonlinear least-square estimation [J]. Journal of Earthquake Engineering and Engineering Vibration, 2010, 9(3): 375-383.
国家自然科学基金资助项目(51475228);机械结构力学及控制国家重点实验室(南京航空航天大学)自主研究课题资助项目(0515G01)
2016-12-22;
2017-03-10
O327; V214.1; TH165.3

穆腾飞,男,1985年9月生,博士、工程师。主要研究方向为结构健康监测。曾发表《输入未知条件下基于自适应广义卡尔曼滤波的结构损伤识别》(《振动工程学报》2014年第27卷第6期)等论文。
E-mail: mutengfei@comac.cc
