基于互相关的ADS-B帧同步解码技术实现
2017-11-07李羚梅李鑫儒
文/李羚梅 李鑫儒
基于互相关的ADS-B帧同步解码技术实现
文/李羚梅 李鑫儒
广播式自动相关监视系统(ADS-B)是一种应用于空中交通监管的技术手段。ADS-B系统可以通过机载设备广播飞机的呼号、位置、高度、速度和其他一些参数信息。本文介绍了ADS-B系统S模式信号的编码方式、消息结构,并对信号报头检测的原理进行阐述,通过仿真和实际测试验证了理论方法的可实现性。
ADS-B帧同步 信号报头检测
1 综述
ADS是一种新的监视工具,不同于二次雷达,它的覆盖范围广,接收信息更加广泛。ADS-B是在ADS基础上形成的广播是自动相关监视,由机载导航设备获得飞机实时经度、纬度、高度等位置信息和三维速度信息,和其他可能附加信息(冲突告警信息、飞行员输入信息、航迹角、航线拐点等信息),再增加必要的飞机标识、飞机类别信息向空中和地面进行广播,供其它飞机和地面用户接收和显示。
ADS-B不仅实现地面对飞机的监视,同时也可以实现飞机与飞机之间的互相监视,这使飞行员在防止空中冲突方面的能力由原来的被动方式变为主动方式,飞行安全将大大加强。此外,这种应用系统将大大提高空域的利用率,减小云层及能见度的限制,以及增强机场场面的监视能力。平时可以用来进行多机飞行训练,主动避免可能发生的空中冲突;战时可以根据机舱综合信息显示器显示的友机位置协调飞行剖面,协同作战。
2 ADS-B消息帧结构介绍
ADS-B消息在每个传输类别的前5个比特为DF(下行数据链格式)字段;紧接着的3个比特应遵循这样的定义:若DF=17,则该3个比特为CA字段;若DF=18,则该3个比特为CF字段;若DF=19,则该3个比特为AF字段。
ADS-B消息数据帧的末尾24比特数据(89--112比特)为PI字段,用于校验和识别ADS-B消息的正误,该24比特位是由特定的生成多项式产生的CRC(循环冗余校验)码。本设计中中频信号为70MHz,采样频率为96MHz,ADS-B传输速率为1MBits/s。
2.1 帧同步的实现(帧头检测)。
ADS-B消息的帧头位置在消息的前端即信号的前8μs时间,总共有4个脉冲,其中每个脉冲的持续时间约为0.5±0.05μs,相对于第一个脉冲,第二个,第三个和第四个脉冲分别出现在1.0μs,3.5μs和4.5μs处,定时误差相对于精确位置处不得超过±0.5μs。信号波形如图1所示。

图1:S模式标准ADS-B信号
信噪比较低的微弱信号不能再采用检测边沿突变的特性来进行脉冲检测。对信号进行互相关运算作为信号预处理,使信号脉冲更容易辨别。
首先做互相关求和运算,即对采样点列x(i)与标准帧头数据列X(i)求互相关,得到互相关点列y(i);然后进行峰值查找,即是判断某点y(i)是否满足y(i-2)<y(i-1)<y(i)>y(i+1)>y(i+2);最后判断脉冲的有效性,通过判断峰值y(i)是否大于预设的阈值,若满足该条件即可认定i所处的位置是脉冲位置。
2.2 数据信息提取
如图2所示,用16MHz的采样率,每个符号帧采样16个点,假设H0在理想情况下为后半帧出现脉冲即矢量S0为(0,0,0,0,0,0,0,0,1, 1,1,1,1,1,1,1),假设H1在理想情况下表式为前半帧出现脉冲即S1为(1,1,1,1,1,1,1,1,0,0,0,0,0 ,0,0,0),当1比特位中采样数据的前八个采样点的和大于后八个采样点的和即可判决假设H1成立,即该比特位为“1”,否则判决假设H0成立,即该比特位为“0”。采样点求和的大小关系反应了比特位的值,显然这种大小关系相差越悬殊,判决越准确,即置信度越高。
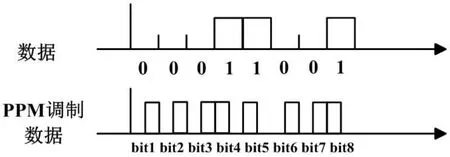
图2:脉冲位置调制示意图
3 仿真实验
3.1 程序构成
将数据量化为210,加26MHz载波,16MHz采样频率,并加入高斯白噪声。如图3所示。
程序主要模块包含AD_module、DDC_ module、head_detection、PPM_module和CRC_module,上图为其主要功能接口连接,AD_module模块主要控制AD模块输出与时钟对齐;DDC_module:将AD模块输入数据进行下变频,并进行IQ路纠频偏;head_ detection:与已知帧头数据作互相关,通过找最大值的方式找到帧头,实现帧同步;PPM_ module:实现PPM解调功能,并为后面CRC模块输出置信度confid和16分频时钟;根据前五位指示DF="10001"长帧、或者"01011"短帧,给出后面crc模块crc_56_flag指示位,做长帧或者短帧的校验。

图3:程序功能框图

图4:PPM解调信息
3.2 查找帧头
查找帧头有一个标准帧头数据与输入数据进行互相关,得到的数据达到阈值后进行比较,查找最大值。
每个符号帧采样16个点,用12位量化数据输入,与标准帧头128个点做互相关,并存入寄存器进行最大值判决。根据经验设定阈值,当寄存器din_mult_reg值大于阈值head_ detect_flag='1',并开始进入最大值、第二大值、第三大值的判决程序,比较出最大的前三个数,记录位置和数值。当寄存器din_mult_ reg中值小于阈值,出判决程序,并标志max_ flag='1',说明最大值已经找到了。检查最大值与找到最大值之间需要延时多少时钟周期,并作延时。
3.3 PPM解调
在检测到帧头后,说明已经做好同步,后续程序进入PPM解调子程序。
首先,将输入数据以16为循环周期存入数据寄存器。然后,每隔16个时钟周期进行判决:前八个数大于后八个数,则判决此符号帧为'1',并用前八个数减去后八个数得到置信度值;前八个数小于后八个数,则判决此符号帧为'0',并用后八个数减去前八个数得到置信度值。ppm_out为ppm解调后的信号,置信度confid共后续CRC校验使用。如图4所示。
3.4 CRC校验
CRC部分将112位数据进行划分,前88位是信息位,后24位是校验位,生成多项式生成的CRC码可以检测出任何突发长度小于等于n-k=24的突发错,并且对于长度等于25的突发错误未检错率为1/2r-1=1.19x10-7,对于长度大于25的突发错误的未检错率为1/2r-1=5.96x10-8,同时CRC的汉明距离为d=6,这意味着可以检测出任意一个小于等于5个的差错。对于随机分布不超过5比特错误的信息,加上前面得到的置信度,可判断出接收到的112位信息的出错位置,并对其进行校正,然后将校正后的信息输出。
4 结束语
使用本文互相关的检测帧头的方法,能够很好的将ADS-B信息检测出来,并且具有较高的灵敏度,文中通过仿真和实际FPGA板上调试证明了此技术的可行性。
[1]王鲁杰.中国民航应优先发展ADS-B应用技术[J].中国民用航空,2006(01):27-30.
[2]张辰.ADS-B信号解码板设计及报文处理[D].哈尔滨工程大学.
[3]张天平,郝建华,许斌,丁丹.ADS-B技术及其在空管中的发展与应用[J].电子产品世界,2009,16(06):37-43.
[4]1090MHz扩展断续振荡ADS-B最低工作性能标准(D0-260A).
作者单位天津光电通信技术有限公司 天津市 300211
