基于Landsat 8 OLI数据的后海水深反演
2017-11-04甘华阳陈太浩
薛 峭,梁 开,甘华阳,陈太浩
(广州海洋地质调查局,广州 510760)
基于Landsat 8 OLI数据的后海水深反演
薛 峭,梁 开,甘华阳,陈太浩
(广州海洋地质调查局,广州 510760)
以海南后海浅水区域为研究区,分析了Landsat 8 OLI多光谱数据和实测水深值的关系,建立了OLI数据单波段反射率和反射率比值的浅海水深反演方法.研究表明:OLI遥感影像的第1、第2和第3波段反射率和水深有较好的相关性;研究区17米水深以浅,第2和第3波段的反射率比值与水深具有最佳的线性关系,决定系数达到0.93,平均相对误差仅为6.42%.利用OLI数据结合少量的实测水深数据可有效的获取海岸带浅水区域的水下地形信息.
Landsat 8 OLI;后海;遥感;水深
0 引言
海岸带近岸水下地形信息是海岸带工程建设、交通航运、渔业养殖、科学研究的基础资料,在经济活动以及自然环境保护方面具有重要的意义[1].传统的水深获取方法是以船舶为载体,采用单波束、多波束等物理测量手段实施,虽可获取高精度的测深数据,但耗时长、费用高、覆盖面有限.
遥感具有大范围、长期对地观测的优势,加之可见光具有较高的大气透射率和较低的水体衰减,使得利用可见光遥感的水深获取成为可能[2].可见光波段测深原理是基于光线对水体的穿透,当水体清澈时,水体后向散射较小,太阳辐射能穿透到底部并反射回传感器,根据传输路径提取出水深信息[3-4].
利用遥感的水深测量方法起源较早,随着遥感技术的进步,遥感测深的精度和最大可测深度都有了很大提高,实用性增强.田庆久等[5]利用实测光谱和水深资料分析对水深信息敏感的波长,用TM影像的第三、第四波段建立江苏近海辐射沙脊群海域的水深反演模型,证明对0~15m水深具有较高的精度;闫峰等[6]以长江口南港至南槽为实验区,建立了考虑悬浮泥沙含量的BP人工神经网络水深反演模型,获取实验区的水深;庞治国等[7]利用高光谱成像仪确定了可见光反演水深的最佳波段,分析了HJ卫星CCD数据的各波段反射率、波段比值组合对水深的敏感度,建立了乌苏里江的单波段水深反演方法,整体精度达到80%以上;黄家柱等[8]采用TM数据开展水深测量实验,建立了含沙量较高的长江南通河段浅部区域的水深计算方法.
新型传感器的使用为遥感水深反演精度的提高、实用性的增强提供了可能.本文以海南后海浅水区域为研究区,分析了Landsat 8 OLI数据和单波束测深值的关系,建立了OLI数据单波段反射率和反射率比值的浅海水深反演方法,获取了后海近岸的水深图,并分析了使用OLI数据反演水深的可行性.
1 研究区
研究区位于海南省万宁市后海近岸浅水区域,北部为海南省最大的泻湖内海—小海.海岸线北至大花角,南至马骝角,海岸类型为砂质岸线,长度约为30km,海域面积约为180km2,大部分水域水深在30m以浅.海域有两个岛屿,北部为甘蔗岛,南部是海南近岸最大的岛屿—大洲岛,被誉为“南海明珠”,是国家级的海洋生态系统自然保护区(图1).
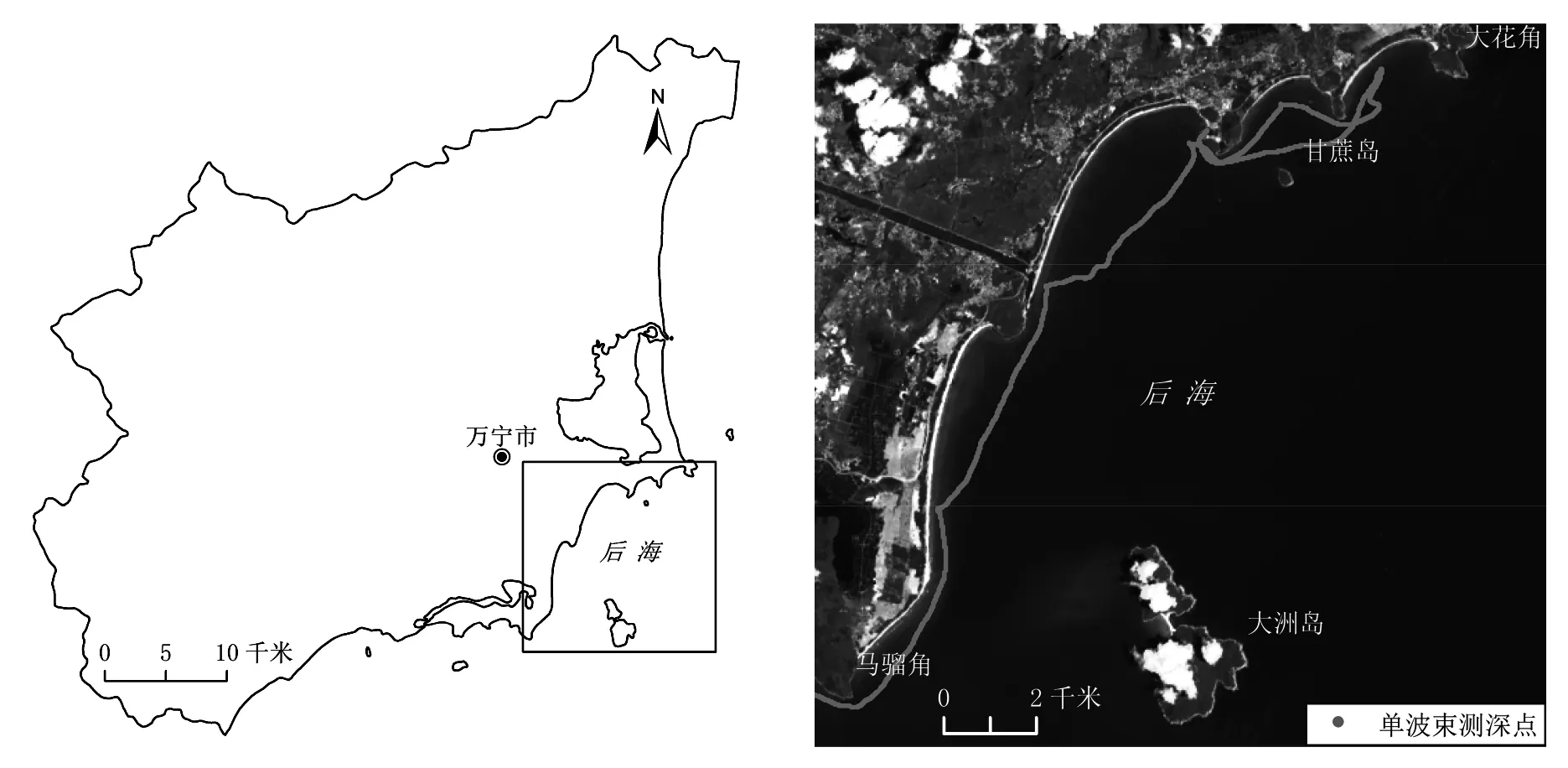
图1 研究区
2 数据
2.1多光谱遥感影像
本研究采用的遥感影像为Landsat 8 OLI多光谱数据,轨道号为123/47,成像日期为2014年9月4日,时间是02:59:36(GMT),成像时太阳高度角为64.13°,方位角为113.07°.卫星搭载了陆地成像仪OLI(Operational Land Imager)和热红外传感器TIRS(Thermal Infrared Sensor).其中,OLI获取的数据为可见光至近红外波长的多光谱数据.相对于Landsat ETM+,OLI增加了用于海岸带观测的海岸波段(第一波段)和用于云检测的卷云波段(第九波段),并调整了各波段的波长范围.影像具有较高的光谱分辨率和空间分辨率[9],OLI数据的详细信息见表1.
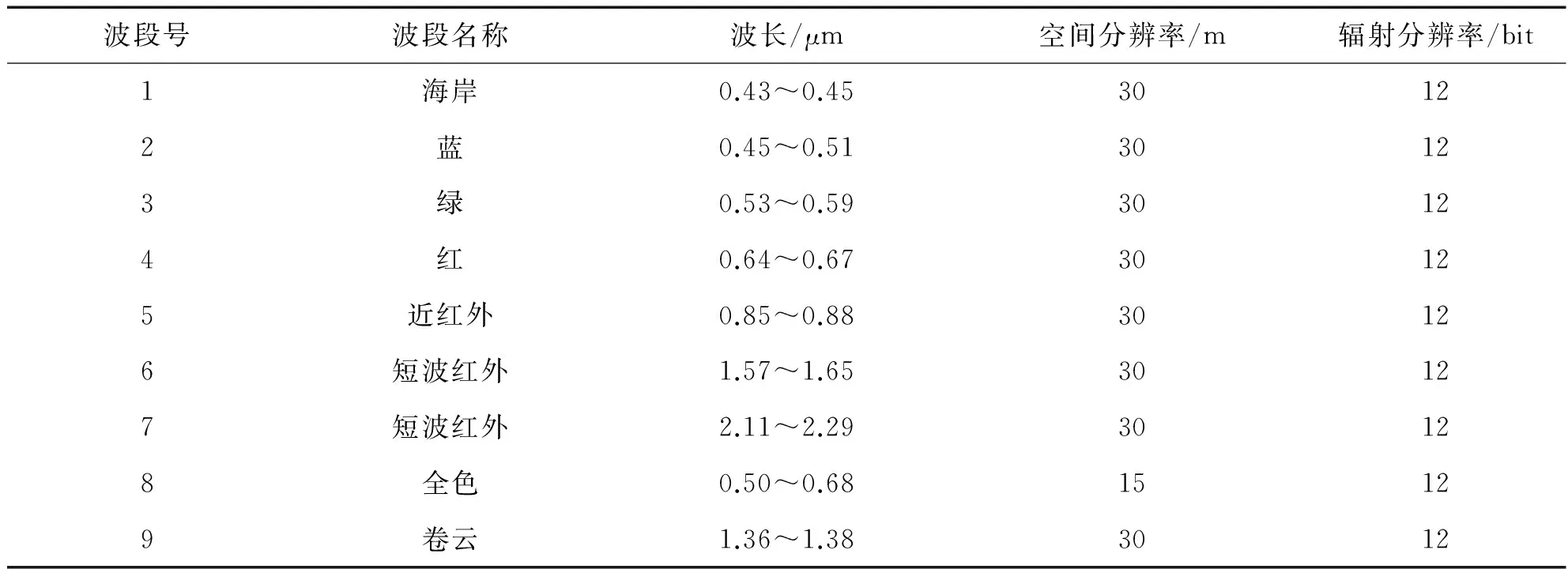
表1 Landsat 8 OLI数据参数
本文使用的遥感影像为L1T级产品,经过了系统的辐射纠正、几何纠正等处理.笔者采用FLAASH(Fast Line-of-sight Atmospheric Analysis of Spectral Hyper cubes)大气校正模型对OLI数据进行大气校正,将影像的DN值转换为表观辐亮度,再进一步转换为海水反射率.选取的大气模式为热带,气溶胶模式为海洋型,大气能见度为40千米,其余参数在影像的元数据文件里查询.大气校正减弱了大气对遥感影像的影响,提高了地物的辨识度,使得地物在影像上的对比度有了显著提高.
FLAASH大气校正模型采用的算法是改进的MODTRAN辐射传输模型,使用图像像素光谱上的特征取代遥感成像时的实测大气参数来估算大气的属性,可有效去除水蒸气和气溶胶的散射效应;采用像素尺度的校正,能够消除目标像元和邻近像元交叉辐射的邻近效应,获得较准确的地物反射率[10-11].
2.2实测水深数据
采用单波束实施水深测量,使用的仪器为SDE-28S高频测深仪,工作频率200kHz,发射功率500W,测深范围0.3~600 m,测深精度±1 cm±0.1%D(D为水深,以米为单位),分辨率0.01 m,吃水调整范围0.0~9.9 m,声速调整范围1300~1700 m/s.
采用“由由行”导航测深系统,该系统具有测线导航、目标导航和实时水深测量功能.记录的导航数据包括点号、地理坐标、平面坐标、水面大地高程、水底大地高程、HDOP、数据采集时间.显示装置则直接显示工作时的点位坐标、航向、航速、船姿、瞬时水深.
水深测量时间为2014年4月17日,测深点共计5966个,测深点间距多数位于4 m~6 m之间.利用实测潮汐数据,用瞬时水深减去测量时的潮高,把水深值校正到潮高基准面,校正之后的水深范围是0.75~17 m,平均水深值为9.3 m.
3 水深反演
3.1模型建立
Landsat 8 OLI影像像元大小为30米,单波束测深航迹线经过的每个像元内均有多个测深点.取像元内测深点的水深均值作为该像元位置处的水深值.像元数目共计1159个,作为分析多光谱反射率和水深之间关系的控制像元.
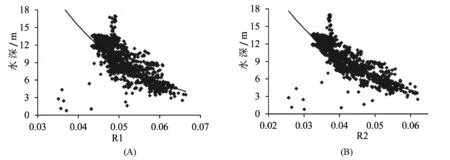
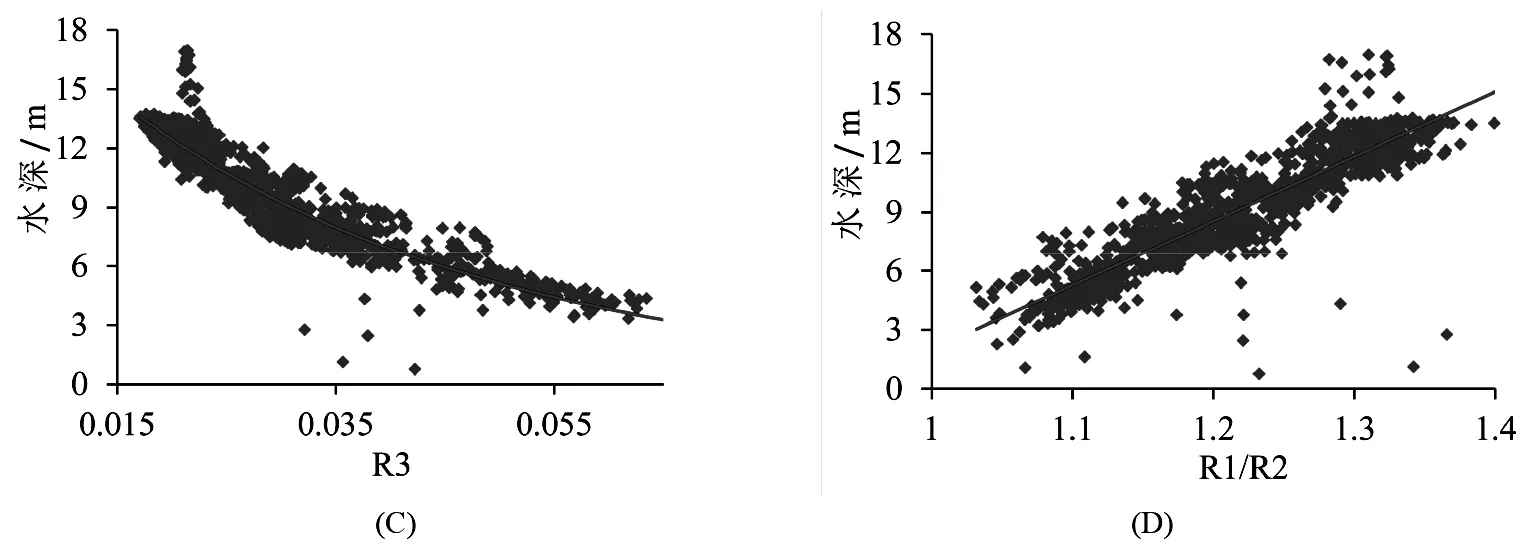
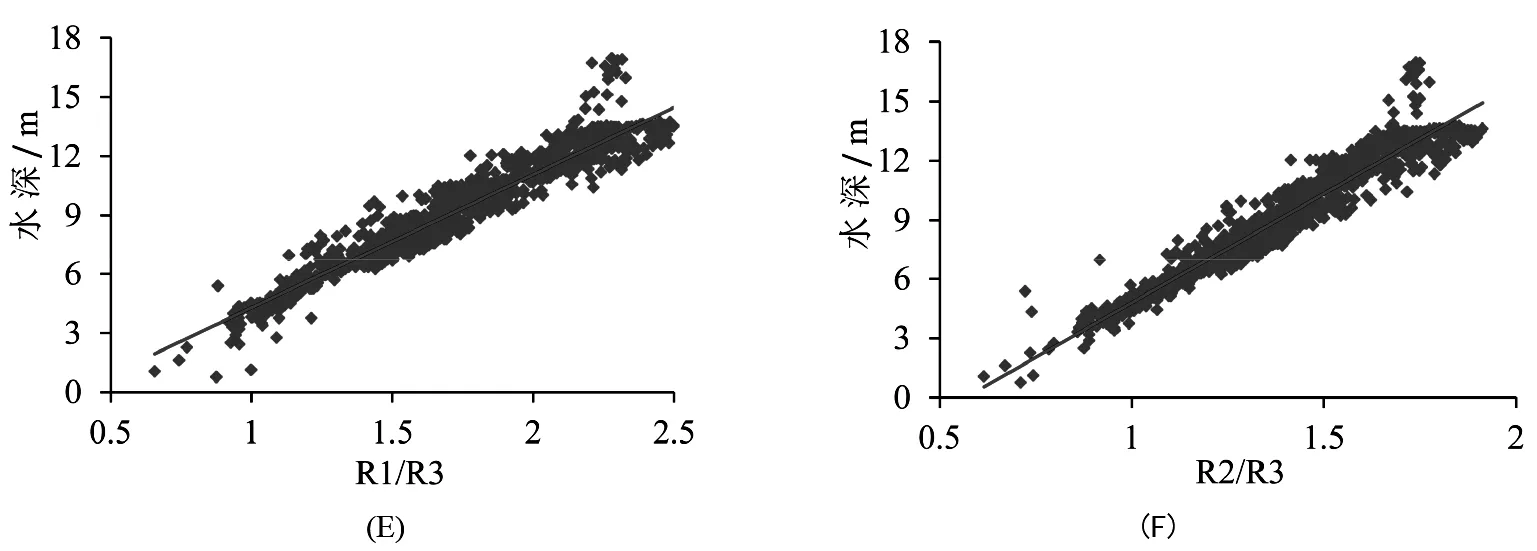
图2 OLI反射率与水深的关系
根据反射率与其对应的像元水深值的分布,发现第1、第2、第3波段的反射率(分别以R1、R2、R3表示)与其位置处的水深值具有较好的相关性.随着反射率的增加水深呈减小趋势,并且水深变化的速率变缓.随波长的增加,反射率分布的中心值减小,反射率的分布范围变宽.具体的表现为R1与水深的散点聚集程度高,且聚集的中心值高于R2和R3.R1、R2、R3与水深的关系可用指数、对数、高阶多项式等多种函数来表达,本文选取对数拟合函数,如图2A、2B、2C所示.
R1、R2、R3之间的比值与水深则呈现明显的线性关系.随着R1/R2、R1/R3、R2/R3的增大,水深逐渐增加,且增加的速率较为一致.本文使用线性关系式来表示这种变化趋势(如图2D、2E、2F所示).
从单波段反射率与水深的关系图看出,有少量像元的反射率和水深的分布关系与它们总体的趋势偏差较大,尤其是R1、R2与水深的关系(图2A、2B).然而在波段比值与水深的关系中,这种偏离趋势的像元数量明显减少,特别是R1/R3、R2/R3与水深的关系图(图2E、2F).因此,采用波段反射率比值的方法能够抑制影像的噪声.
3.2模型精度
笔者分别采用对数、线性函数拟合反射率、反射率比值与水深的关系,获取不同的水深反演方法,得到的具体公式见表2.选择四个统计量对拟合得到的方法进行精度评价[12-13]:决定系数、平均绝对误差(MAE)、均方根误差(RMSE)和平均相对误差(MRE).其中:

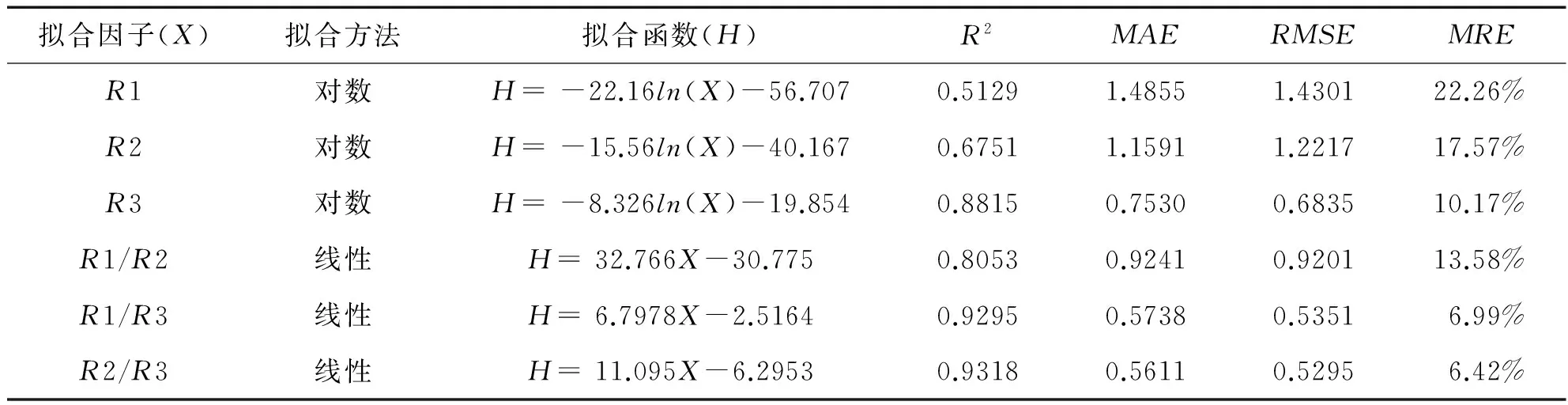
表2 拟合得到的方法及其误差
从图2及表2看出,研究区0至17米水深范围内,OLI数据前三个波段的反射率R1、R2、R3与水深值存在着较高的相关性.采用对数关系拟合反射率与其对应水深值,决定系数分别达到0.51、0.67和0.88;平均绝对误差分别达到1.49米、1.16米和0.75米;均方根误差分别为1.43米、1.22米和0.68米;平均相对误差分别为22.26%、17.57%和10.17%.
然而,研究区0至17米水深范围内,OLI数据前三个波段反射率比值与水深呈明显的线性关系.其反射率比值R1/R2、R1/R3、R2/R3与水深的线性拟合的决定系数分别达到0.81、0.93和0.93;平均绝对误差分别达到0.92米、0.57米和0.56米,均方根误差分别达到0.92米、0.54米和0.53米,平均相对误差分别为13.58%、6.99%和6.42%.
综合来看,单波段中第三波段的反射率R3与水深的相关性最好,其次是R2,最后是R1.反射率比值拟合方法中R2/R3的反射率比值与水深的相关性最好,其次是R1/R3,最后是R1/R2.反射率比值的拟合方法总体优于单波段的拟合方法.在实际应用中可以选择R1/R3和R2/R3拟合到的关系作为水深反演的方法,本文选择R2/R3拟合得到的函数作为研究区水深计算的方法.
3.3反演结果
首先对研究区遥感影像水陆分离,提取出海水区域.水体对近红外波段的吸收十分强烈,反映在OLI影像上则是近红外波段水体的反射率很低,而陆地植被及砂质岸线的反射率很高.取第六波段反射率10%作为分割的阈值,有效的分离出海域水体,少量的陆地水体也被分离了出来.
针对海域水体,以表2中R2/R3作为因子拟合得到的水深反演方法获取后海近岸的水深,将水深以不同的颜色表示(图3).从图上可以看出,海底地形受海岸的制约明显,水深总体趋势表现为自西北往东南增大.大洲岛南部近岸水深较深,北部近岸水深较浅,北部的西侧有一处浅滩.与海图作对比表明,15米以浅的水深反演结果精确度较高、15~17米的可靠性次之、17米以上的误差较大.
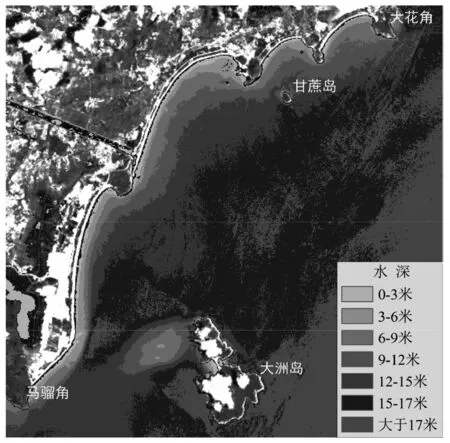
图3 水深反演结果
制约遥感水深反演精度的因素主要有以下几个方面:
(1)水深数据采集及处理.采集的瞬时水深具有较高的精度,需要详细的实测潮位数据将其校正到理论最低潮面.另外,单波束测深线沿岸布设,没能获取17米以上的水深,难以建立深水区域的光谱特性和实测水深的关系;
(2)海水的光学性质差异.海水光学性质不仅由纯水本身决定,还受到浮游植物、悬浮物质、黄色物质的影响[14].再加上风浪、薄云、船舶等因素,海水在遥感影像上呈现复杂的光谱特征,给基于遥感的水深反演带来干扰;
(3)影像大气校正的误差.受到大气校正模型精度的限制,难以完全消除大气对遥感影像的影响,获取真实的海水反射率.尤其是蓝光波段,气溶胶对蓝光的影响大,大气对蓝光波段的瑞利散射作用也最强,大气校正的可靠性偏低[15];
(4)影像的分辨率.遥感影像的空间分辨率和光谱分辨率制约水深反演的可靠性,高分辨率和高光谱分辨率的影像将进一步提高水深反演的精度.同样,卫星较短的重访周期也有助于获取有利气象条件下的遥感影像,这对于海南等多云雨地区的遥感水深反演具有重要意义.
4 结论
本文在海南后海近岸开展遥感水深测量实验,采用Landsat 8 OLI多光谱数据和实测的单波束测深数据,通过回归分析建立了海水反射率与水深的关系式,估算研究区的水深分布.研究表明:(1)OLI遥感影像的第1、第2和第3波段反射率和水深有较好的相关性,第3波段反射率与水深的相关性最高;(2)研究区17米水深以浅,OLI数据第2和第3波段的反射率比值与水深具有最佳的线性关系,决定系数达到0.93,平均相对误差仅为6.42%;(3)利用OLI数据结合少量的实测水深资料可有效的获取海岸带浅水区域的水下地形信息.
[1]李由明,邱清波,王平,等.对虾养殖废水对潮间带生态系统中有机物含量的影响[J].琼州学院学报,2015,22(5):71-76.
[2]胡蕾秋,刘亚岚,任玉环,等.SPOT5多光谱图像对南沙珊瑚礁信息提取方法的探讨[J].遥感技术与应用,2010,25(4):493-501.
[3]张春桂,曾银东.台湾海峡海水透明度遥感监测及时空变化分析[J].气象与环境学报,2015,31(2):73-81.
[4]BABAN S.M.J..The evaluation of different algorithms for bathymetric charting of lakes using Landsat imagery[J].International Journal of Remote Sensing,1993(14):2263-2273.
[5]田庆久,王晶晶,杜心栋.江苏近海岸水深遥感研究[J].遥感学报,2007,11(3):373-379.
[6]闫峰,王艳姣.基于泥沙因子的水深遥感反演模型[J].Lake Sci.(湖泊科学),2008,20(5):655-661.
[7]庞治国,李琳,潘世兵.乌苏里江水深遥感反演[J].中国科学:信息科学,2011,41(增刊):187-192.
[8]黄家柱,尤玉明.长江南通河段卫星遥感水深探测试验[J].水科学进展,2002,13(2):235-238.
[9]田震,马毅,张靖宇,等.基于Landsat-8遥感影像和LiDAR测深数据的水深主被动遥感反演研究[J].海洋技术学报,2015,34(2):1-8.
[10]杨杭,张霞,帅通,等.OMSI-II图像大气校正之FLAASH法与经验线性法的比较[J].测绘通报,2010,(8):4-6.
[11]韩晓庆,苏艺,李静,等.海岸带地区SPOT卫星影像大气校正方法比较及精度验证[J].地理研究,2012,31(11):2007-2016.
[12]王晶晶,田庆久.基于TM图像的近海岸带水深反演研究[J].遥感信息,2006(6):27-30.
[13]叶小敏,郑全安,纪育强,等.基于TM影像的胶州湾水深遥感[J].海洋测绘,2009,29(2):12-19.
[14]王梦茵,胡启伟.基于遥感的南海北部夏季上升流对渔业资源的影响[J].海南热带海洋学院学报,2017,24(2):22-29.
[15]刘伟刚,郭铌,李耀辉,等.基于FLAASH模型的FY-3A/MERSI数据大气校正研究[J].高原气象,2013,32(4):1140-1147.
OffshoreWaterDepthRetrievalofHouhaiBasedonLandsat8OLIData
XUE Qiao, LIANG Kai, GAN Hua-yang, CHEN Tai-hao
(Guangzhou Marine Geological Survey, Guangzhou 510760, China)
By taking Houhai offshore as a typical study area, the relationship between Landsat 8 OLI multi-spectral data and situ water depth was analyzed.The water depth retrieval methods were established by using signal band reflectance and the ratio of reflectance, respectively.The results showed that the reflectance of the first three bands has close relationship with water depth.With the depth less than 17 m within the study area, the reflectance ratio of the second and the third band have the best linear relationship with water depth—the coefficient of determination is 0.93, and the average relative error is as low as 6.42%.It is possible to get shallow water depth in coastal zone by using OLI data together with some situ measurements.
Landsat 8 OLI; Houhai; remote sensing; water depth
格式:薛峭,梁开,甘华阳,陈太浩.基于Landsat 8 OLI数据的后海水深反演[J].海南热带海洋学院学报,2017,24(5):63-68.
2017-09-28
国土资源公益性行业科研专项(201011019-04);中国地质调查局国家海洋地质专项(1212010914020)
薛峭(1987-),男,江苏徐州人,广州海洋地质调查局工程师,硕士,研究方向为遥感与GIS应用.
TP79
A
2096-3122(2017) 05-0063-06
10.13307/j.issn.2096-3122.2017.05.11
(编校曾福庚)
