改进的PSO-SVM在表面肌电信号模式识别中的研究*
2017-11-03顾明亮
顾明亮,刘 俊
(上海电机学院电气学院,上海 201306;2.上海电机学院机械学院,上海201306)
项目来源:上海电机学院登峰学科机械工程支持项目(16DFXK01)
2017-04-27修改日期2017-06-22
改进的PSO-SVM在表面肌电信号模式识别中的研究*
顾明亮1,刘 俊2*
(上海电机学院电气学院,上海 201306;2.上海电机学院机械学院,上海201306)
为了提高表面肌电信号的遥操作机械手运动模式识别率,设优化支持向量机(IPSO-SVM)。该方法首先简化PSO的位置和速度公式,然后提出ESE状态估计策略判断算法的“早熟”收敛,最后对6类手臂运动模式(握拳、展拳、内旋、外旋、屈腕、伸腕)进行分类并与另外4个测试算法的分类结果进行比较。实验结果表明:IPSO-SVM算法的平均准确率为93.75%,而传统SVM算法的平均准确率为70.21%;算法的训练时间和泛化时间都有明显的提高;具有较强的鲁棒性和抗干扰能力。因此IPSO-SVM算法可以很好的解决表面肌电信号的动作模式分类问题,具有很好的应用价值。
表面肌电信号;模式识别;粒子群优化算法;支持向量机
在核工业领域遥操作机器人已得到了广泛的发展[1-5],其中基于表面肌电信号的遥操作机械手越来越成为研究的热点,它可以对关键设备进行维护、放射性废弃物处理和异物打捞等。目前在表面肌电信号遥操作机械手的核设备更换过程中,最重要的是基于表面肌电信号机械手的多运动模式识别。
近几年,支持向量机(SVM)在表面肌电信号的动作模式识别中的应用越来越多,进而有许多改进的新方法。例如:张启忠等[6]提出以关联维和分维数作为特征向量,并采用支持向量机的二叉树结构实现手臂动作模式分类;王玲等[7]采用最小二乘支持向量机(LS-SVM)进行模式识别,实验效果明显优于传统的RBF神经网络分类器;武昊等[8]采用PSO优化SVM对跌倒表面肌电信号进行了模式识别分析,准确率优于网格法和GA-SVM分类器且具有较强的抗干扰能力。粒子群算法(PSO)是一种迭代优化算法,具有依赖经验参数少、收敛速度快等优点,缺点是容易陷入“早熟”收敛且进化后期收敛速度慢。目前,对PSO的改进方法主要有3种:改进自身参数[9]、改进粒子领域拓扑结构[10]和与其他算法融合[11-12]。
本文提出改进的PSO-SVM算法,首先对粒子群算法的自身参数进行优化,再将改进的粒子群算法与支持向量机融合,解决了模式识别过程中粒子容易聚集在某一特定位置的“早熟”收敛问题,使表面肌电信号在遥操作机械手的应用中模式识别准确率更高,操作精度更准确。
1 SVM算法原理简介
支持向量机SVM(Support Vector Machines)是由著名学者VAPNIK V N基于统计学习的VC理论和结构风险最小原理上提出来的一种新的机器学习方法。它的核心思想是将非线性数据进行变换映射到高维线性空间中,满足分类间距最大,使分类线能正确的把两类样本分开,进而得到所需要的最优分类超平面。如图1所示,假设给定数据集为{xi,yi},i=1,2,…,N,yi∈{-1,+1},xi∈Rd,平面上分别用圈和叉表示两个待分类的样本。

图1 支持向量机原理图
SVM引入松弛变量ξi≥0和惩罚系数C(C>0),则超平面的求解公式为:

(1)
式中:αi是二次优化问题所求解的拉格朗日因子,则得到的最优分类超平面为:

2 IPSO-SVM算法原理及实现过程
2.1 标准PSO算法原理
粒子群优化算法PSO(Particle Swarm Optimization)是由Eberhart等人提出的一种新的全局优化进化算法,源于对鸟类捕食行为的模拟。PSO采用“速度-位置”搜索方式,将粒子看作只有速度和位置的点,忽略其质量和体积的影响。
假设在一个D维的求解空间中,有N个粒子组成一个群体,则粒子的位置和速度坐标分别为:Xi=(xi1,xi2,…,xid),Vi=(vi1,vi2,…,vid)。粒子群的速度和位置更新公式如下:
(2)

文献[13]通过大量实验证明,惯性权值w从最大值0.95降到0.2时粒子群的全局搜索和局部搜索能力最强,公式如下:

式中:wmax和wmin是惯性权值的最大值和最小值,g是当前迭代数,G是设置的最大迭代数。
2.2IPSO-SVM算法实现
PSO优化SVM算法在表面肌电信号的模式识别中得到了广泛的应用,但经过大量的实验发现PSO-SVM优化算法中的粒子容易出现“早熟”现象,即在表面肌电信号的模式识别过程中粒子会聚集在某一特定的位置。文献[14-19]中对PSO都做了一些改进操作,如:变异、自适应度方差、遗传退火算法等。
定理1PSO算法的进化过程与粒子速度无关。

(3)
将式(3)进行迭代可以消除速度变量,如式(4)所示:

(4)
上式中剔除了速度变量,不再需要人为设置参数[-vmin,vmax]的影响,减少了计算量、提高了粒子的搜索效率。所以PSO优化方程可化简为式(5):

(5)
本文提出IPSO-SVM算法,对式(1)中的拉格朗日因子αi进行求解时,αi要同时满足式(1)中的不等式约束条件和等式约束条件。

(6)
(7)
定理2PSO算法收敛时,个体最优值Pdbest等于群体最优值Pgbest。
文献[21]中通过严格的数学证明,假设粒子收敛于某一固定的位置,则有如下结论:
式中:a=C1/(C1+C2),假设学习因子C1=C2=2,则等式为:
由于等式中Pdbest和Pgbest都是随时间不断更新的粒子,即当有新的位置优于个体极值或有新的位置优于全局极值时,Pdbest和Pgbest就会被新位置取代。假设粒子群最终收敛时全局极值为P*,则有:
从而个体极值Pdbest将按照式(8)逐渐靠拢P*,则有:
以上的证明为PSO算法“早熟”收敛提供了理论基础,本文依据ESE状态估计策略提出了改进的PSO算法“早熟”收敛的判断方法,如图2所示。

图2 “收敛”状态和“发散”状态
在每一代的进化中都要计算每个粒子Pi到其他粒子之间的平均距离,若当前代中全局最优粒子Pg计算出的平均距离小于其他粒子计算出的平均距离,则表明粒子是处于逐渐收敛的状态,如图2(a)所示;反之,则为图2(b)所示的发散状态。
当PSO算法的进化状态为“收敛”时,IPSO算法中引入新的一项不仅使种群充分地分散在解空间而且提高了算法全局搜索能力,因此式(5)调整为:

(8)

图3 IPSO-SVM算法流程图
2.3IPSO-SVM实现过程
表面肌电信号动作模式识别的重点是优化SVM算法中的惩罚参数C和径向基参数σ,合适的参数C和σ可以有效的提高模式识别的精度。如图3所示,为IPSO-SVM算法流程图。
(1)初始化
①对常数进行初始化:m,C,C1,C2,C3,G,wmax,wmin,m为种群数;

(2)最优化:
①更新惯性权值w;
④当粒子群出现“早熟”收敛时,根据式(8)增加种群粒子的多样性,并跳转到第3步;
⑤迭代次数t+1,跳转到第1步,继续搜索;
(3)输出最优解,算法结束。
3 实验结果分析
本实验采用ZJE-Ⅱ型表面肌电信号采集卡,采样频率为1 024 Hz。选择肱桡肌、尺侧腕屈肌、掌长肌三块肌肉设计6种手臂运动模式(握拳、展拳、内旋、外旋、屈腕、伸腕),如图4所示。每种动作包含5 000个采样数据点,分别采用切比雪夫带通滤波器和切比雪夫带阻滤波器对肌电信号进行消噪处理。图5为消噪后的握拳表面肌电信号。

图4 6种手臂运动模式
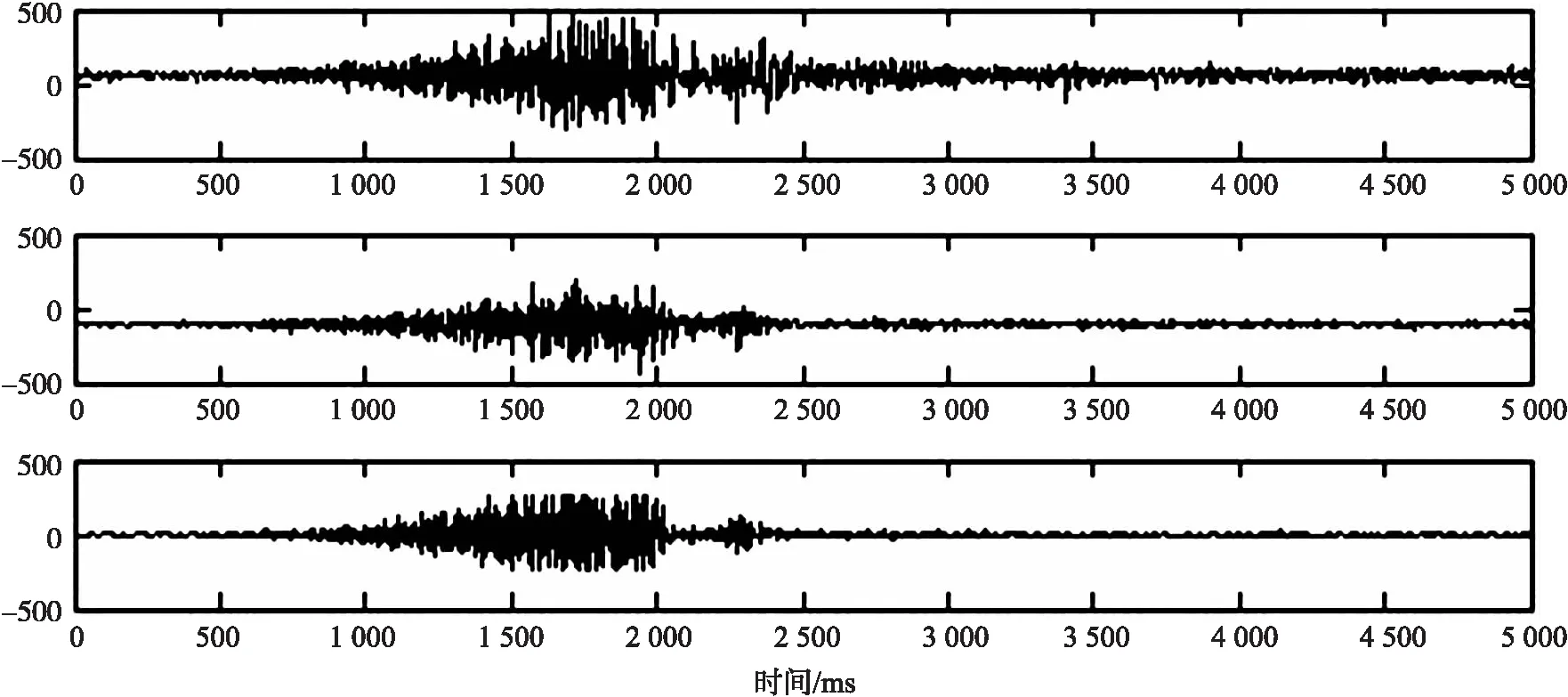
图5 握拳表面肌电信号
实验对象为8名健康的志愿者,其中5名男性3名女性,年龄在21到24岁之间。让他们在非疲劳状态下做6类动作模式各25组,则有6×200组表面肌电信号,其中6×120组信号作为训练信号用来建立算法模式识别模型,6×80作为算法泛化能力的验证信号。本文采用MATLAB软件对6类手臂动作进行模式识别仿真,特征值采用小波包变换法,将计算出的协方差矩阵特征值的最大值作为特征值,这样3路信号可组成一个1×3的矩阵。实验结果将与传统SVM、LIBSVM、PSO-SVM、GA-SVM这4种最新的模式识别算法进行比较,其中最大迭代次数为100次,粒子群数量为40,遗传算法的交叉率为0.8,变异率为0.2。图6算法的训练时间与图7算法的泛化时间,采用tic函数和toc函数分别判断程序开始和结束的时间。通过图6和图7的结果可以发现:将遗传算法(GA)和粒子群算法(PSO)融合到支持向量机(SVM)中可以减少算法训练时间。因为GA算法对数据进行组合交叉和变异操作将适应度差的淘汰,而保留适应度高的形成新的种群;PSO算法采用速度和位置两个变量,通过记忆项、自身认知项和群体认知项不断更新新粒子的位置和速度,但后期都会陷入“早熟”收敛。而采用改进的IPSO优化SVM可以更加有效的缩减训练时间加快训练速度,同时在算法的泛化能力上也有较大的提高。理论上的原因是:IPSO算法只依靠位置变量Xi进行更新避免了人为设置速度变量[-vmin,vmax]范围的约束;ESE状态估计策略能够较好的判断粒子群的“早熟”收敛状态;粒子群的“早熟”收敛状态出现时,通过增加公式项提高粒子群的多样性。
如图8和表1所示,IPSO-SVM算法在表面肌电信号的模式识别中具有较高的准确率,6种动作模式的平均准确率为93.75%,而传统SVM算法的平均准确率为70.21%,与GA-SVM、PSO-SVM相比较提高了4%~5%。综合来看,IPSO-SVM算法模型的泛化时间和模式识别的准确率具有较大的优势。

图8 4种算法模式识别准确率
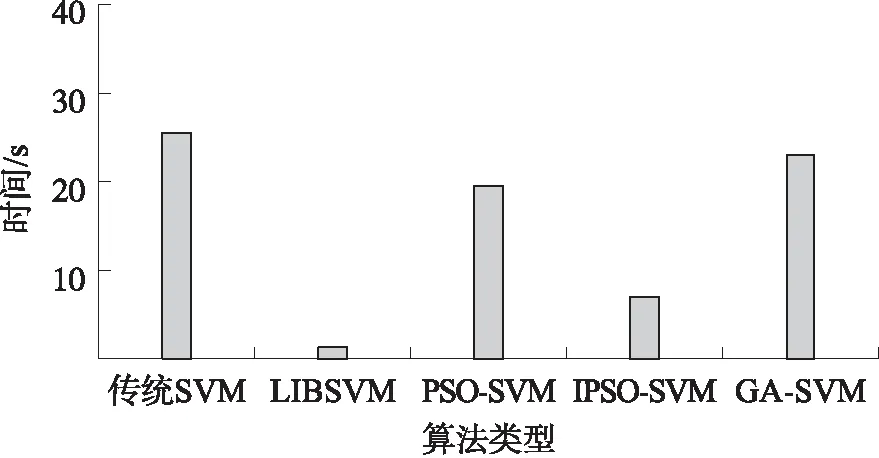
图6 4种算法的训练时间
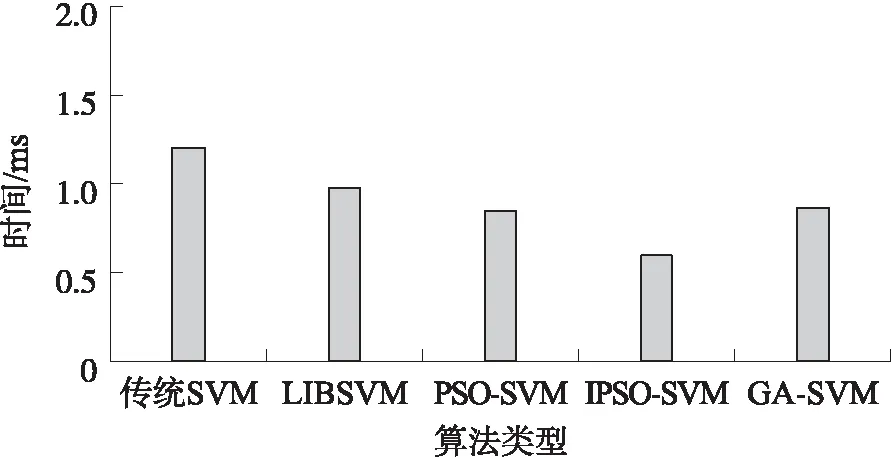
图7 4种算法的泛化时间

表1 5种算法的结果对比
4 结论
IPSO-SVM算法在表面肌电信号的模式识别这一新的领域中具有很好的应用效果,对6种手臂运动(握拳、展拳、内旋、外旋、屈腕、伸腕)模式识别的平均准确率达到93.75%,解决了粒子群“早熟”收敛问题且算法的泛化能力也有较大提高,为遥操作机械手在核设备领域的应用奠定了基础。但算法仍有不足,如图6所示LIBSVM算法在训练时间上明显较低,是因为LIBSVM算法中应用了caching和shrinking简化软件,所以IPSO-SVM算法接下来可以尝试将caching和shrinking等软件进行融入。
[1] Byrd J S,Devries K R. A 6-Legged Telerobot for Nuclear Applications Developpment[J]. International Journal of Robotics Research,1990,9(2):43-52.
[2] Desbats P,Geffard F,Pioplain G,et al. Force-Feedback Teleoperation of an Industrial Robot in a Nuclear Spent Fuel Reprocessing Plant[J]. Industrial Robot,2006,33(3):178-186.
[3] Iborra A,Pastor J A,Alvarez B,et al. Robots in Radioactive Environments[J]. IEEE Robotics and Automation Magazine,2003,10(4):12-22.
[4] Raj K,Prasad K K,Bansal N K. Radioactive Waste Management Practices in India[J]. Nuclear Engineering and Design,2006,236(7/8):914-930.
[5] Seungho K,Seung H J. Application of Robotics for the Nuclear Power Plants in Korea[C]//1st International Conference on Applied Robotics for the Power Industry. Piscataway,NJ,USA:IEEE,2010:Spp.
[6] 张启忠,席旭刚,罗志增. 基于表面肌电信号形态特征的多模式识别研究[J]. 传感技术学报,2012,25(12):1636-1642.
[7] 王玲. 基于小波包变换的表面肌电信号模式识别[J]. 现代电子技术,2011,34(17):122-124,128.
[8] 武昊,席旭刚,罗志增. 基于熵和PSO优化SVM的肌电信号跌倒识别[J]. 传感技术学报,2015,28(11):1586-1590.
[9] 田雨波,朱人杰,薛权祥. 粒子群优化算法中惯性权重的研究进展[J]. 计算机工程与应用,2008,44(23):39-41.
[10] 姜云飞,林笠. 用布尔代数求解最小碰集[J]. 计算机学报,2003,26(8):920-924.
[11] 王维博,冯全源. 基于分层多子群的混沌粒子群优化算法[J]. 控制与决策,2010,25(11):1663-1668.
[12] 孙湘,周大为,张希望. 一种混沌粒子群算法[J]. 计算机工程与科学,2010,32(12):85-88.
[13] Suganthan P N. Particle Swarm Optimiser with Neighborhood Operator[C]//Proc of the Congress on Evolutionary Computation,Washington DC,1999:1958-1962.
[14] Agrawal M,Mishra M,Kushwah S P S. Association Rules Optimization Using Improved PSO Algorithm[C]//2015 International Conference on Communication Networks(ICCN),Gwalior,2015:395-398.
[15] Liu S,Hou M,Zhu G,et al. An Improved PSO Algorithm for Flexible Load Dispatch[C]//2014 IEEE PES Asia-Pacific Power and Energy Engineering Conference(APPEEC),Hong Kong,2014:1-6.
[16] 吕振肃,侯志荣. 自适应变异的粒子群优化算法[J]. 电子学报,2004,34(3):416-420.
[17] 侯志荣. 基于退火策略的粒子群优化算法[A]. 中国自动化学会智能自动化专业委会.200年中国智能自动化会议论文集(下册)[C]//中国自动化学会智能自动化专业委员会,2003:5.
[18] 王佳佳,高发荣,孙曜,等. 基于sEMG的行走步态非均匀特性及其对识别的影响[J]. 传感技术学报,2016,29(3):384-389.
[19] 武昊,席旭刚,罗志增. 基于熵和PSO优化SVM的肌电信号跌倒识别[J]. 传感技术学报,2015,28(11):1586-1590.
[20] Tan L. A ClusteringK-Means Algorithm Based on Improved PSO Algorithm[C]//2015 Fifth International Conference on Communication Systems and Network Technologies,Gwalior,2015:940-944.
[21] 王振武,孙佳骏,尹成峰. 改进粒子群算法优化的支持向量机及其应用[J]. 哈尔滨工程大学学报,2016,37(12):1728-1733.
ASupportVectorMachineBasedonanImprovedParticleSwarmOptimizationAlgorithmforSEMGSignalPatternRecognition*
GUMingliang1,LIUJun2*
(1.Shanghai Dianji University,School of Electrical,Shanghai 201306,China;2.Shanghai Dianji University,School of Mechanical,Shanghai 201306,China)
In order to improve the motion pattern recognition rate of EMG signals,this paper proposes an improved PSO algorithm to optimize SVM(IPSO-SVM). Firstly,IPSO-SVM introduces a way to simplify the position and velocity formulas of PSO,then proposes ESE state estimation for premature convergence,and finally adopts 5 test algorithms to classify the six hand motion patterns recognition(fist clenching,fist unfolding,internal and external rotation,wrist intorsion and wrist extorsion). The results showed that the average accuracy rate of IPSO-SVM is 93.75% and the average accuracy of traditional SVM algorithm is 70.21%;the training and testing time were also obviously reduced. It also has strong robustness and noise immunity. Therefore,the IPSO-SVM algorithm can be used to solve the classification problem of the surface EMG signal,which has a good application value.
surface electromyography signal;pattern recognition;particle swarm optimization algorithm;support vector machine
TP24
A
1004-1699(2017)10-1459-06
10.3969/j.issn.1004-1699.2017.10.001

顾明亮(1992-),男,硕士研究生,研究方向为智能电气控制,1010762220@qq.com;

刘俊(1971-),女,副教授,研究方向为机电一体化(智能机器人—视觉传感与位姿控制),junl99@163.com。
