基于精确定位的交通标识识别系统的检测方法研究
2017-11-01崔晓川邹博维张恒嘉
崔晓川+邹博维+张恒嘉

摘 要:为了填补目前智能网联汽车在智能标识识别系统检测方法中的空白,对交通标识识别系统检测方法进行研究。通过安装精密机器人控制系统并配合以高精度定位系统,搭建智能标识识别系统的测量平台。通过精确控制试验车辆的速度及行驶过程中的相应姿态,并且采用实时记录试验车辆与目标交通标识的位置信息的方式达到对交通标识识别系统进行可靠性检验的目的。实验证明:该方法的速度控制精度在±0.5km/h以内、距离控制精度在±0.1m以内。
关键词:智能标识识别系统;精密机器人;高精度定位系统;检测方法;可靠性
中图分类号:U467.1 文献标识码:A 文章编号:1005-2550(2017)05-0008-04
Research on Test Method of Traffic Signs Recognition System Based on Precise Location
CUI Xiao-chuan, ZOU Bo-wei, Zhang Heng-jia
( China Automotive Technology & Research Center, Tianjin300300, China )
Abstract: In order to fill margin of intelligent vehicle identification system test method in current intelligent connected vehicel, this paper studied the detection method of traffic sign recognition system. By installation of precision robot system and the high precision positioning system, intelligent identification system measuring platform was estabilished.Through the accurate control of the speed of the vehicle and the vehicle attitude in the process of test and measuring the real-time location information between the measured vehicle and the target traffic signs, the reliability test of the traffic sign recognition system was carried out. The experiment results show that the method of the speed control precision is within 0.5km/h and the range accuracy is within 0.1m or less.
1 引言
随着汽车技术及相应的视觉图像和电子技术的进步,目前大量的智能图像传感器应用于汽车辅助驾驶功能,进而不断地提高汽车的科技含量和安全性能[1]。随着汽车保有量的不断增加,城市交通拥挤、由于驾驶员的各种原因带来的交通事故数量也呈现几何级数式的的增长,因此近几年安全驾驶、智能交通[2-3]等概念受到了越来越多的重视。
智能交通标识识别系统主要利用视觉图像传感元件,在汽车行驶的过程中不断地对周围环境进行图像提取,通过一系列的图像预处理、图像特征识别及图像特征匹配,将行驶路段的交通标识识别出来,并通过车速表显示或者抬头显示等方式告知驾驶员相应的道路交通信息(如图1所示),有助于驾驶员将注意力集中在合法的车辆驾驶上,不仅规范了交通环境,同时有利于降低交通事故的发生[4]。
国外对智能交通标识识别系统的研究起步较早,提出了颜色分割、边缘检测、神经网络等识别方法[5]。目前,福特开发的全新智能车速控制系统包含有两个系统模块,分别为可调节车速控制系统以及交通信号识别系统;可调节车速控制系统可以人为设定最高的限速速度,而交通信号识别系统则可以识别交通标识信息并通过仪表盘通知驾驶员。而奔驰也在S级和E级车型中通过前风挡玻璃内侧安装的视觉摄像头识别道路两旁的标识,并做出判断是否是禁行标识或者其他比如说限速标识或者限制超车的标识,同时车辆通过导航系统以及其他数据来判断车辆是否会违反交通标识的趋势,并通过声音提示给驾驶员注意相应的交通标识提醒信息。国内在研究智能交通标识识别系统领域起步相对较晚,但目前已有国内很多科研团体及高校在研发智能交通标识识别系统中取得了实质性的成果,均体现在对标识识别系统提取出来图像的图像处理技术研究。各方学者通过对SURF算法、LSH算法、RANSAC算法、SIFT算法、稀疏矩阵表示算法等图像处理及图像匹配算法的研究和发展,已经提出了各自实现交通标识识别的成熟算法并取得了实验阶段的成功[6-9]。
2 交通标识识别系统的工作原理及影响系统的关键因素
交通标识识别系统的工作原理是利用视觉成像元件通过图像提取技术采集周围交通道路中的环境信息,将提取出的图像信息进行后续的图像预处理、特征识别和特征匹配等技术的处理,将与标准模板库中的交通標识信息匹配成功的图像特征显示出来,用以提示驾驶员此路段的交通标识信息。
2.1 图像预处理
对交通环境中采集到的彩色图像进行颜色分割是系统检测标识信号的重要一步,在对颜色进行分割前,对图像进行光照均衡化处理可以削弱光照变化对后续图像识别的影响,增强彩色图像的对比度。在RGB颜色模型下对采集的图像进行预处理二值化后,可通过膨胀、腐蚀、面积过滤等处理方法配合以相应的中值滤波、高斯滤波等滤波方法,进而得到满足要求的连通区域[10]。endprint
2.2 图像特征提取
得到满足要求的连通区域后,对该区域进行特征提取。图像的特征體现了交通标识的信息,通过对预处理图像的颜色、形状、纹理等信息的提取,剔除采集图像中大量不必要的信息。特征提取可以分为:基于颜色空间的特征识别、图像形态学处理、基于形状的特征识别等几种提取方式。常用的特征提取算法有基于尺度空间特征的SIFT算法,它具有较高的鲁棒性和可区分性。图像特征提取过程中发现光照条件、拍摄角度及旋转对后续的图像匹配有很大的影响作用[11]。
2.3 图像特征匹配
将提取得到的满足交通标识特征的连通区域与标准交通标识图像模板库中的特征进行对比匹配,最终得到通过视觉传感元件采集到的交通环境信息中的具体交通标识信息,通过不同的方式发送给驾驶员提示遵守相应的交通规则。匹配的时间直接影响智能交通标识识别系统的响应时间,故前期的图像处理工作至关重要,处理得到的特征与标准模板库中的特征相似程度越高,则系统的响应时间越小,系统灵敏度越高。
2.4 确定影响系统的关键因素
通过对系统工作原理的分析表明,图像的初始提取对整车级别的智能交通标识识别系统的检测结果有着决定性的因素,初始提取出来的图像越清晰,系统最终识别的正确率越高。车辆的颠簸及左右摇摆会使提取的图像模糊影响后续的图像处理;视觉传感器与交通标识牌的角度会使提取的图像发生形状畸变,影响图像特征识别及匹配;实验过程中的光照条件对图像提取的质量也起到了决定性的作用[12-14]。综上所述本文提出的对交通标识识别系统的检测方法主要考虑试验路面平整度、试验过程中的车辆的速度、车辆与交通标识牌的角度(通过车辆与交通标识牌的距离及交通标识牌的自身高度计算得到)、车辆行驶的直线度以及试验时的光照条件。
3 基于高精度定位系统的检验方法
交通标识漏检的原因主要分7种:标识较小、标识部分被遮挡、标识的表面被污损、背景颜色干扰、交通标识颜色特征的退化、标识间部分重叠以及拍摄的视角偏大[15]。排除由于标识牌自身带来的漏检原因,本文提出一种基于精确定位的交通标识识别系统的检测方法,旨在试验过程中精确控制车辆的行驶速度、行驶直线度,并精确记录各个时刻车辆与目标交通标识牌的距离,进而得出系统正确识别交通标识信息的起止位置,最终判定系统的可靠程度。
3.1 系统的设备组成及关键试验环节
基于高精度定位系统的检验方法需要使用转向机器人实现试验路径跟随功能、使用制动机器人和油门机器人配合控制试验车速;高精度RT陀螺及RT RANGE处理模块采集试验车辆的实时控制参数,并将数据传给机器人控制器对整个试验过程进行闭环控制,从而提高试验精度。图3至图7为系统设备图示:
为了消除车辆左右摇摆对系统可靠性的影响,规定以直线路径进行试验,转向机器人通过高精度扭矩控制可以精确控制车辆方向盘的转动角度,从而实现路径跟随功能。将目标路径数据输入到机器人控制器中,控制转向机器人按照目标路径数据操控试验车辆,试验车辆的实时姿态通过高精度RT采集系统采集计算,并将试验车的实时路径数据发回到机器人控制器与目标路径数据进行比较,通过实际数据与理论数据的差值对试验车辆进行闭环控制。转向机器人实现路径跟随功能流程图如图8所示:
试验过程中利用油门机器人及制动机器人对车辆进行高精度的速度控制。由于每辆试验车辆的速度与油门开度特征曲线均不相同,故试验时需要对车辆进行速度PID调校,从而获得相应的速度与油门开度的特征参数。将各油门开度下的速度数据输入机器人控制器计算得到PID参数,以该参数对车辆进行速度控制验证试验,如果实际速度与理论速度差值大于0.5km/h,则将误差数据输入机器人控制器重新计算PID参数,往复上述操作可以确定速度精度满足0.5km/h时的速度控制参数。速度调校流程图如图9所示:
3.2 检验方法流程
试验需在干燥、平坦的经过检定认证过的试验场地进行,路面的平整度在1.5m/km以下,水平可见范围超过1km。试验分白天和夜晚两种工况进行,白天进行试验时不许打开任何车灯进行辅助照明,夜晚进行试验时可以打开所需车灯进行辅助照明。
将高精度转向控制机器人、制动机器人和油门踏板机器人牢固安装在试验车辆上,在试验过程中精确控制车辆行驶的速度及行驶路径的直线度,如图10所示,图中转向机器人牢固安装在方向盘上,制动机器人及油门机器人通过金属支架与驾驶员座椅牢固安装在一起。采用高精度RT陀螺定位系统采集试验过程中车辆的速度以及车辆与交通标识牌的距离(计算车辆与交通标识信息的角度),如图11所示,采用充气刚性支架将高精度定位系统固定在试验车辆中分面附近,利用外设基站(如图12所示)及GPS定位可以精确测量车辆的实时姿态信息。
试验前需要对转向机器人、制动机器人及油门踏板机器人进行调校。将转向机器人顺时针和逆时针分别打满至试验车辆转向盘的极限行程位置、随后通过使车辆沿直线行驶的方式确定方向盘的中心原点位置,完成转向机器人的初始化操作。利用3.1中提到的路径跟随操作流程确保试验过程中利用转向机器人可以将车辆行驶直线的偏离误差控制在±0.05m之内;确定制动踏板的初始位置和最大踏板行程,消除踏板空行程对控制精度的影响;对油门踏板每隔10%的油门开度分别进行10%到100%的油门开度调校,记录各油门开度下车辆的速度数据,利用3.1中提到的速度调校流程对试验车辆进行速度调校。调校结束后,对试验车辆进行直线路径的精度验证,转向机器人控制精度应该在±0.05m之内,油门踏板机器人与制动机器人结合控制车辆速度精度应该在±0.5km/h之内。
高精度陀螺定位系统在试验过程中记录表征车辆姿态的参数,试验前需要精确量取陀螺中心点与车辆最前端的位置以及陀螺中心点与车辆纵向中心平面的偏移量,通过软件将高精度定位系统强制平移至车辆中心位置,以便试验时测量的数据代表车辆中分面上的车辆最前端与目标交通标识牌的位置关系。试验前以不大于50km/h的速度将随机输入作用于转向机器人对高精度定位系统进行初始化,使试验车辆在与外设基站建立的坐标系下定位精度达到±0.1m以内。利用高精度陀螺定位系统配合以基站建立试验坐标系,将试验路直线段方向定义为X方向,标识牌位置定义为X=0处,车辆运动过程中的实时坐标用以计算被测车辆与目标标识牌的距离关系。endprint
调校结束后,进行试验,利用视频或者音频记录设备采集试验过程中智能交通标识识别系统的提示信息,进而判断系统的可靠程度。检验方法流程图如图13所示:
3.3 试验数据及结论
验证试验在平直的沥青试验路进行,试验目标车速设定为50km/h,试验开始时将车速手动加速到稍微高于设定的50km/h目标车速,随即将车辆控制交给机器人系统进行直线路径测试,试验过程中机器人系统通过自动调节车辆的油门与制动来控制车速。
利用上述3.1和3.2的方法对某款车型进行智能标识识别系统检验,试验中的试验车速度特性曲线、路径跟随数据曲线及被测车辆与标识牌的实时距离关系曲线如图14至图17所示。
试验过程中预先把试验车速度加到预计的理论速度附近后再将车辆交给机器人接管,有助于缩短速度控制的调节时间。如图14所示红色曲线表示理论速度,蓝色曲线表示试验车辆的实际速度,本次试验预计将试验车辆速度控制在50.25km/h,试验时将试验车辆人为加速至52km/h左右后将车辆交给机器人接管,经过大约5s的调节后机器人系统将车辆速度精确控制在合理范围内,图中表明此次速度控制精度为0.21km.h。
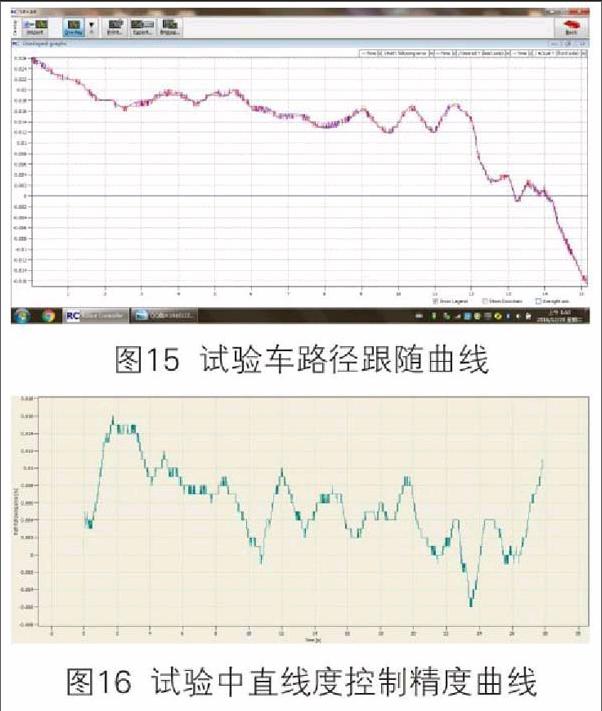
路径跟随过程可以在任何车速下进行,试验时一般在试验车辆起步后就开始路径跟随调整,这样在速度控制的人为加速阶段即可将路径跟随精度调整至合理范围内。如图15所示,蓝色曲线为理论路径,红色曲线为实际路径与理论路径的偏移误差,图中表明此次路径跟随最大偏差为0.026m。如图16所示为试验过程中的直线度控制曲线,本次试验对直线度控制在+0.016m和-0.006m之间。
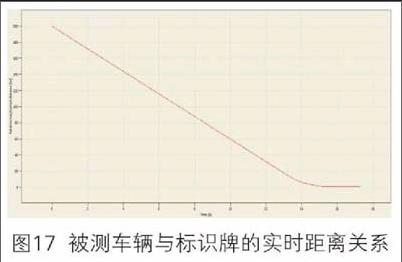
如图17所示为试验过程中被测车辆与标识牌的实时距离关系。
试验结果表明:本文提出的智能标识识别系统检验方法简便可行,对不同工作原理的标识识别系统有同样的检测流程。该检验方法的精度高,对未来车联网检测标准的制定有一定的帮助。
4 结束语
本文提出了一种基于高精度定位系统对交通标识识别系统的检测方法。通过分析交通标识识别的工作原理,确定影响系统可靠性的测量因素,提出了采用机器人配合高精度陀螺定位系统的检测方法。经过试验证明该方法精度高,对速度控制可以达到±0.5km/h之内,对定位精度可以达到±0.1m以内,该方法可以实时记录试验车辆与目标标识牌的距离。该方法的提出填补了目前对交通标识识别系统检测方法的空白,随着车联网技术的不断发展,为今后智能网联汽车标准做了理论储备与技术支持。随着主动安全技术不断被大众所接受,该领域的研究也为今后C-NCAP的发展打下了坚定的基础。
参考文献:
[1]刘华平, 李建民, 胡晓林, 孙富春. 动态场景下的交通标识检测与识别研究进展[J].中国图象图形学报, 2013,18(5):493-503.
[2]肖平.车联网:未来城市交通的智能中枢[J].中国经济报告, 2015,9:118-120.
[3]顿文涛, 赵玉成, 王力斌, 李勉, 马斌强, 袁超, 袁志华. 车联网的关键技术及研究进展[J]. 农业网络信息, 2015,8:46-50.
[4]李祥熙, 张航. 交通标识识别研究综述[J]. 公路交通科技(应用技术版), 2010,06:253-257.
[5]朱双东, 陆晓峰. 道路交通标识识别的研究现状及展望[J]. 计算机工程与科学, 2006, 28(12):50-102.
[6]王铿. 基于稀疏表示的交通标识识别[D]. 南京:南京理工大学, 2013.
[7]刘芳. 基于注意机制的交通标识的检测[D]. 北京:北京交通大学, 2012.
[8]于利云. 交通标识牌自动识别系统的关键技术的研究[D]. 上海:上海海运学院, 2003.
[9]唐睢睢. 交通标识识别算法研究[D]. 北京:北京交通大学, 2014.
[10]余进程. 车载辅助系统中禁令交通标识的识别研究[D]. 广州:广东工业大学, 2014.
[11]卢艳君. 交通标识自动检测与识别算法研究[D]. 武漢:武汉科技大学, 2015.
[12]余天洪, 王荣本, 郭烈, 顾柏园. 不同光照条件下直线型车道标识识别方法研究[J]. 汽车工程, 2005, 27(5):510-569.
[13]尹荣蓉, 薛卫. 不良天气状况下交通标识识别关键技术的研究[J]. 公路交通科技(应用技术版), 2014,11:236-238.
[14]杜凤杰. 市内公路交通标识实时识别算法研究[D]. 石家庄:河北经贸大学, 2015.
[15]王慧敏.智能辅助驾驶系统中的禁令交通标识识别方法研究[D]. 成都:西南交通大学, 2013.endprint
