基于逆变器的异步电机特性模拟及控制技术研究
2017-11-01吴政苏建徽徐华电施永
吴政,苏建徽,徐华电,施永
(合肥工业大学教育部光伏系统工程研究中心,安徽 合肥 230009)
基于逆变器的异步电机特性模拟及控制技术研究
吴政,苏建徽,徐华电,施永
(合肥工业大学教育部光伏系统工程研究中心,安徽 合肥 230009)
基于逆变器的异步电机及负载模拟系统可取代实际电机和负载实验平台,在便于变频驱动系统实验的同时,可为控制优化提供指导。该系统的电机负载模型的拟合控制是关键技术之一,针对异步电机及其负载的模拟,提出一种基于虚拟转子磁链定向的电流闭环矢量控制策略。该策略可适应端口输入电压的任意变化,并保证模型电流跟踪的快速性和准确性,满足电机模拟器的稳态和瞬态电压电流外特性关系要求。对电机的空载启动、突加负载和电源三相不平衡3种典型工况进行了仿真,结果验证了所提方案的正确性和可行性。
电机驱动器;电机模拟器;电机数学模型;电流跟踪
电机作为主要动力设备广泛应用于国防、交通及日常生活中,是用电量最多的一类电器。在电机调速系统中,电机驱动器是其关键设备,对调速系统的性能起决定性作用。在电机驱动器的性能测试与考核中,通常采用电机及其机械负载一起构成实验平台,拖动电机在不同工况下运行。在基于电机的负载测试实验中,实验室条件下电机易获得,而电机的机械负载不易获得,常采用“电动机+同轴发电机”的方案,通过控制发电机的输出功率来获得所需的转矩。此方案构造的测试系统具有固有的低速动态特性,2套驱动系统通过传动轴连接在一起相互作用带来了动态特性方面的限制。而若电机空载运行,则电机的动态过程主要是加减速,暂态时间较短,对电机驱动器的测试不够全面。
实际上,在电机带载的测试实验中,电机不以机电能量转换为目的,更多关注的是电机定子的电压电流特性。为此,本文介绍一种采用逆变器代替实际电机及其负载实验平台的电机模拟器系统。电机模拟器的主要思想是控制1台逆变器,使逆变器具有与实际电机相同的端口电压电流特性。从端口来看,电机模拟器可等效为实际电机及其负载。
电机模拟器系统的优点在于其特性灵活,可模拟异步电机、同步电机等不同类型电机,易于修改电机参数以及机械负载模型。该模拟器能复现实际电机在不同工况下的端口电压电流特性,且无机械系统限制导致的速度动态特性无法实现的问题。
电机模拟器的概念最早是由英国学者H.J.Slater提出,该模拟器基于旋转坐标系建立了异步电机的动态数学模型[1],采用双DSP结构,分别实现电机模型的实时计算和电流的跟踪控制[2]。文献[3-4]提出了电力电子负载模拟的概念,分析了L,LC,LCL 3种不同接口电路对模拟器端口电流的影响,并搭建了DSP+FPGA硬件平台来验证负载模拟器,该平台选用了LCL滤波器,能有效滤除高次谐波,但其结构复杂,存在固有的高阶谐振现象。
本质上来看电机模拟器是一种功率型半实物仿真,将电机及其负载以数学模型的形式表示,并通过逆变器作为接口单元实现硬件与模型的匹配。随着计算机技术的不断发展,硬件在环仿真(hardware in-the-loop,HIL)技术在电力电子技术领域得到了快速发展。国外有学者将硬件在环仿真技术引入到电机模拟中[5-6],以实时数学模型来表示电机及其机械负载,通过控制功率放大器来模拟异步电机端口的电压电流特性,其不足之处在于成本高昂。
目前国内关于电力电子负载模拟的研究多局限于电阻、电感等常规负载[7-10],用于直流电源等的测试中。对电机的模拟研究较少[11-12],文献[13-14]比较了Euler法和Adams法2种数值解法求解电机数学模型的计算精度,推导了数值求解的收敛域。由于电机模拟器端口电压波形未知,造成锁相困难,因此在静止坐标系下通过PI调节器跟踪指令电流。该控制策略难以消除电流跟踪中的稳态误差,电机模拟器端口电流与实际电机不能完全一致。
本文以笼型异步电机为模拟对象,首先在两相静止坐标下建立了电机的动态数学模型。然后在旋转坐标系下采用了一种电流闭环矢量控制策略跟踪指令电流,并给出了电流调节器的设计方法[15-18]。最后,基于Matlab/Simulink平台对异步电机3种典型工况进行了仿真,结果验证了本文所设计的电机模拟器系统的可行性。
1 电机模拟器的结构及原理
1.1 电机模拟器的基本结构
电机模拟器结构如图1所示,主电路部分主要包括逆变桥电路、滤波电感、直流电源。控制算法主要由电机数学模型以及电流跟踪算法构成。电机模拟器的供电电源可以是三相电网或由待测试逆变器驱动。

图1 电机模拟器的结构框图Fig.1 Schematic diagram of motor emulator structure
本文选取L滤波器作为电机模拟器的接口电路,因其结构简单,便于控制系统的设计,且能减小待测试逆变器和模拟侧逆变器开关频率引起的纹波电流的耦合。
1.2 电机模拟器的工作原理
电机模拟器的核心在于建立电机模型以获取准确的指令电流,以及端口电流的跟踪控制。首先在静止坐标系下建立电机的动态数学模型,实时采集电机模拟器的端口电压,通过对电机数学模型的求解,计算出实际电机在当前电压输入和负载作用时的定子电流,并将其作为指令;同时能得到电机的转速、磁链等信息,必要时可用于系统的控制设计或将其输出。然后将采样电流和指令电流分解成直流分量,在旋转坐标系下采用PI调节器实现电流的闭环矢量控制,使得模拟器的端口电流跟踪指令电流,满足电机模拟器的电压电流外特性关系要求。须指出,电压测量准确是实现电机模拟器的前提,当电源电压为逆变器输出的高频PWM方波时,可采用复位积分的测量方式,即用1个短周期内的电压平均值代替电压瞬时值。
2 电机数学模型及其求
异步电机三相原始模型较为复杂,是一个高阶、非线性、强耦合的多变量系统,通过坐标变换能简化电机数学模型,便于分析和计算。
在电机模拟器系统中,电机作为模拟对象,其参数应为已知量。对电机建立数学模型,不以解耦控制为目的,而是主要在于准确求解电机模型,因此选择在静止坐标系下建立模型。
2.1 异步电机动态数学模型
电机数学模型具有4阶电压方程和1阶运动方程,为5阶系统。以定子电压、负载转矩作为输入变量,转速、定子电流、转子磁链作为状态变量,忽略磁路饱和以及参数变化等因素,电机数学模型的状态方程如下:

式中:np为极对数;J为转动惯量;TL为负载转矩;Lm为互感;Ls为定子电感;Lr为转子电感;Tr为转子电磁时间常数;σ为漏磁系数。
从上述电机状态方程可看出,以定子电压、转矩作为输入量,通过求解电机模型的状态方程,能获得当前输入下的电机定子电流、转子磁链以及转速。
2.2 电机数学模型的求解方法
在对电机数学模型求解的过程中,需对其进行离散化。微分方程常用的数值解法有:Euler法、Adams法、梯形法等。其中,Euler法是一种单步数值解法,易于理解,计算简单,但计算精度相对较差;梯形法是一种隐式算法,计算复杂;Adams法是一种多步数值解法,利用之前时刻计算出点的值来提高计算精度,且增加的计算量有限。对于电机模拟器而言,获得准确的指令电流,是实现电机模拟器系统的前提,因此采用Adams法来离散电机数学模型。
二步Adams法的计算公式为

式中:h为计算步长;xm+1为下一时刻的状态变量;xm为当前时刻的状态变量;Fm为当前时刻的微分量;Fm-1为上一时刻的微分量。
将式(2)代入式(1)电机数学模型的微分方程中,即可实现对电机数学模型的数值求解。
3 电流跟踪控制策略
电流跟踪控制是电机模拟器系统的控制核心,需满足系统的快速性和稳定性要求。在两相静止坐标系下采用电流闭环的控制策略时,PI调节器难以实现零稳态误差,而PR调节器只能消除固定频率的电流偏差。因此需要在旋转坐标系下将三相电流分解成直流分量,才能满足电机模拟器的控制要求,实现电流跟踪无静差。
由于外部电源电压未知,当模拟器端口电压波形为PWM波或端口电压三相不平衡时,锁相困难,因此选择端口电压矢量作为坐标变换的参考坐标系会给控制系统设计增加难度。考虑到磁链不会突变,同时在建立电机数学模型时磁链为必不可少的状态变量之一。本文提出一种基于虚拟转子磁链定向的矢量控制方法,即以电机模拟器的虚拟转子总磁链为d轴方向,逆时针旋转90°为q轴方向,构造了如图2所示的控制系统,将指令电流和采样电流分解成直流分量,在d-q坐标系下实现电流闭环矢量控制。

图2 电机模拟器的控制结构框图Fig.2 Control structure diagram of motor emulator
为使电流环具有较好的快速性,将电流环校正成典型Ⅰ型系统,采用PI型电流调节器,电流环的等效结构框图如图3所示。

图3 电流环等效结构框图Fig.3 Equivalent structure diagram of current control loop
图3 中,is*为指令电流;is为电流采样值;KPWM为逆变器等效增益;T1为采样延时环节的时间常数;T2为逆变器延时时间常数;L,R分别为接口电路的电感和线路阻抗。
将延时环节用泰勒展开,并忽略高次项,以一阶惯性环节近似代替,由图2得到电流环的开环传递函数为i12s

电流环按典型Ⅰ型系统设计,选择KITΣi=0.5,其中KI为系统的开环增益,TΣi=T1+T2,可求出控制器的参数:

由式(4)和式(5)可知,当电机模拟侧逆变器的开关频率确定,电流调节器的参数仅与接口电路参数有关。
4 电机模拟器的仿真验证
为验证方案的可行性,本文选取了1台4 kW的笼型异步电机作为模拟对象,电机参数为:额定功率4 kW,额定电压380 V,极对数2,转动惯量0.131 kg·m2,励磁电感172.2 mH,漏感5.839 mH,定子电阻1.405 Ω,转子电阻1.395 Ω。在Matlab/Simulink中构建了上述电机模拟器系统,电机模拟侧逆变器的开关频率为10 kHz,采用S-函数模拟数字信号处理器中断程序,实现电机数学模型的求解和电流的跟踪控制。同时以Simulink/PSB中三相异步电机模块同步仿真作为参考。
图4为空载启动仿真波形图。图4a为电机模拟器与PSB中电机模块直接空载启动时A相电流波形;图4b为转速变化情况。从图4中可以看出,在相同电源电压下空载启动时,电机模拟器的端口相电流能够准确跟踪指令电流,转速波形与实际电机的转速波形也基本一致。
图5为电机模拟器空载启动后稳态运行,0.15 s时突加力矩负载的响应波形。图5a为模拟器与电机模块的A相电流;图5b为动态过程中的电流波形;图5c为转速变化波形。在突加负载后,电机模拟器能够与实际电机一样快速响应,在动态过程中准确跟踪电流,模拟器转速波形与PSB中电机模块也一致。
图6为电机模拟器稳态运行在0.15 s时外部电源A相幅值突变,造成电源三相不平衡的仿真波形。图6a为端口电压波形图;图6b为电机模拟器A相电流跟踪波形;图6c为三相不平衡时的电流动态跟踪波形;图6d为转速曲线。从电流响应和转速响应可以看出,在端口电压三相不平衡时基于电机模拟器转子磁链定向依然能够将三相电流分解,准确模拟电机的端口特性,避免了基于电压定向在此工况下的锁相困难问题。
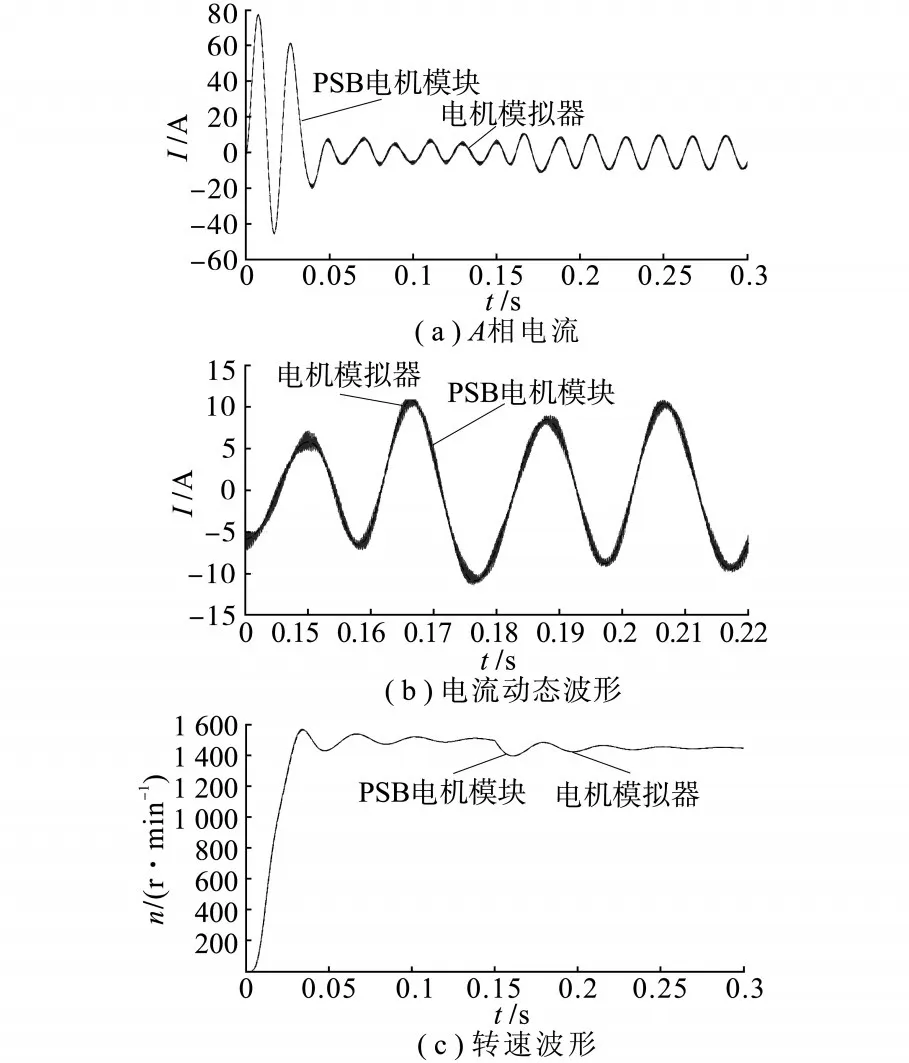
图5 突加负载仿真波形Fig.5 Simulation waveforms of sudden loading
从上述波形可以看出,电机模拟器的端口电压电流特性以及转速特性都与Simulink中电机模块基本一致,从而验证了电机模拟器能在空载启动、突加负载以及三相电压不平衡的典型工况下准确模拟实际电机的端口特性。
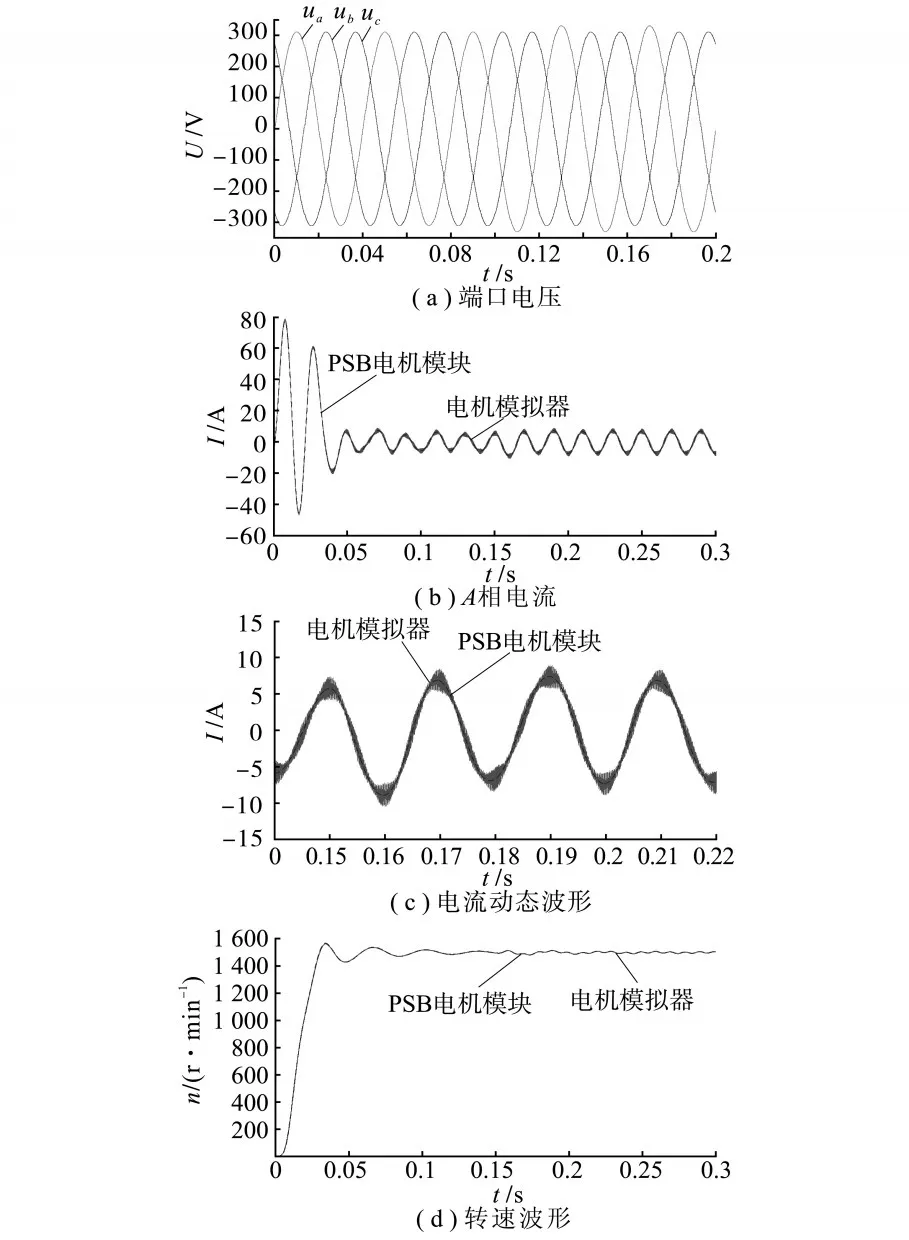
图6 三相不平衡仿真波形Fig.6 Simulation waveforms of three phase unbalance
5 结论
1)电机模拟器为逆变器的测试提供了灵活便利的实验平台,由于不具备真实的旋转部件的惯性,发生故障时能够快速保护,降低安全隐患;能够减少测试过程中的功率损耗,节能环保;不受机械系统的制约,可对逆变器进行全面测试。
2)电机数学模型不以解耦为目的,主要在于通过检测输入电压和给定负载转矩,可准确求解出当前输入下的电机各状态变量,因此在静止坐标系下建立异步电机数学模型更为简便。
3)采用基于虚拟转子磁链定向的闭环矢量控制策略,可适应端口电压波形的任意变化,避免了电源电压实时锁相困难的问题,简化了控制系统设计。
4)此方案构建的电机模拟器,可准确模拟异步电机在不同工况下的端口特性。在相同的端电压和负载作用下,无论是动态响应还是稳态响应,都与实际电机一致。
综上所述,利用逆变器拓扑电路模拟异步电机及其负载的方案可行有效,可为电机驱动技术的研发提供新的方法。
[1]Jack A G,Atkinson D J,Slater H J.Real-time Emulation for Power Equipment Development.Part 1:Real-time Simulation[J].IEE Proc.Electr.Power Appl.1998,(2):92-97.
[2]Slater H J,Atkinson D J,Jack A G.Real-time Emulation for Power Equipment Development.Part 2:The Virtual Machine[J].IEE Proc.Electr.Power Appl.1998,(2):153-158.
[3]Srinivasa Rao Y,Mukul Chandorkar.Electrical Load Emulation Using Power Electronic Converters[C]//TENCON 2008 IEEE Region 10 Conference,Hyderabad,2008.
[4]Rao Y Srinivasa,Chandorkar Mukul.Electrical Load Emulation Using Optimal Feedback Control Technique[C]//Proceedings of the IEEE International Conference on Industrial Technology,Gippsland,Australia,2009.
[5]Oleg Vodyakho,Fletcher Fleming,Michael Steurer,et al.Implementation of a Virtual Induction Machine Test Bed Utilizing the Power Hardware-in-the-loop Concept[C]//2011 IEEE Electric Ship Technologies Symposium,Alexandria,2011.
[6]Fleming F,Edrington C,Steurer M,et al.Development and Implementation of a 25 kW Virtual Induction Machine Test Bed Utilizing the Power-hardware-in-the-loop Concept[C]//Electric Machines and Drives Conference,Miami,2009.
[7]潘诗锋,赵剑锋,王浔.大功率交流电子负载的研究[J].电力电子技术,2006,40(1):97-100.
[8]王成智,邹旭东,许赟,等.采用改进重复控制的大功率电力电子负载[J].中国电机工程学报,2009,29(12):1-9.
[9]王成智,邹旭东,陈鹏云,等.大功率电力电子负载并网变换器的设计与改进[J].中国电机工程学报,2009,29(18):1-7.
[10]单任仲,肖湘宁,尹忠东,等.能量回馈型电力电子负载的控制方法[J].中国电机工程学报,2010,30(18):62-66.
[11]陈志博.基于PWM换流器的异步电动机及其负载特性数字模拟[D].武汉:华中科技大学,2007.
[12]姚剑锋.基于PWM技术的电动机模拟器[D].天津:天津大学,2006.
[13]黄清军,孙牧村,邹旭东,等.模拟电机端口特性的电力电子负载系统设计[J].电力系统自动化,2014,38(3):71-77.
[14]宋鹏先,李耀华,王平,等.交流电机端口特性的数字化实现方法[J].电工技术学报,2015,30(14):184-192.
[15]沈凤龙,满永奎,王建辉,等.矢量控制系统调节器设计及实验研究[J].电气传动,2013,43(2):3-6.
[16]马小亮.矢量控制系统的解耦与调节器设计[J].电气传动,2009,39(1):3-10.
[17]张兴,张崇巍.PWM整流器及其控制[M].北京:机械工业出版社,2012.
[18]王喜莲,许振亮.基于PI参数自适应的开关磁阻电机调速控制研究[J].中国电机工程学报,2015,35(16):4215-4234.
Research on Simulation for Characteristics of Asynchronous Motor and Control Strategies Based on Inverters
WU Zheng,SU Jianhui,XU Huadian,SHI Yong
(Research Center for Photovoltaic System Engineering of Ministry of Education,Hefei University of Technology,Hefei 230009,Anhui,China)
The test platform of actual electrical machines and their associated mechanical loads can be replaced by the motor emulator system based on inverters.The system is convenient for the tests of frequency conversion driving and provides guidance for control optimization.Fitting mechanical load model is a key technology of the system,in order to simulate asynchronous motors and their loads,a current closed-loop vector control strategy based on virtual rotor flux orientation was proposed.The control strategy adapts to arbitrary input voltage and guarantees the speed and accuracy of port current tracking.Moreover,it meets the requirements of the relationship between voltage and current of the motor emulator in both steady and transient state.No-load starting,sudden loading and three phase unbalance of induction motor had been simulated,and the results of simulation verifiy the validity and feasibility of the scheme.
motor driver;motor emulator;motor mathematical model;current tracking
TM46
A
10.19457/j.1001-2095.20171002
吴政(1992-),男,硕士研究生,Email:wuzheng921@126.com
2016-10-27
修改稿日期:2016-12-19
