多台压缩机防喘振系统控制方法的研究
2017-11-01田海刘澄树
田海,刘澄树
(内蒙古科技大学信息工程学院,内蒙古 包头 014010)
多台压缩机防喘振系统控制方法的研究
田海,刘澄树
(内蒙古科技大学信息工程学院,内蒙古 包头 014010)
针对包钢燃气厂煤气加压站2台并联运行的离心式压缩机易发生喘振的问题,根据防喘振控制系统原理,对原有防喘振控制系统进行改进。2台压缩机由原来一台工频、另一台变频改为2台同步变频的运行方式。在流量接近防喘振线时采取变频恒压逼近的控制策略,能有效地减少回流阀的开启次数和入口的回流流量。在回流阀开度的控制方法上采取Fuzzy-PI双模控制,使系统获得较好的动态性能和稳态性能,并通过Matlab/Simulink仿真证明了其控制的有效性。
离心式压缩机;喘振;同步变频;双模控制;Matlab仿真
喘振是离心式压缩机或特性曲线呈驼峰状的大型离心式风机在小流量条件下工作时,在叶轮和扩压器中产生剧烈的气流分离导致的[1]。喘振时离心压缩机出口的气体压力和流量发生周期性的剧烈振荡,造成气体反向流动,机身连同管网系统也会随之产生强烈振动,发生低频率、高振幅的振荡现象。喘振会破坏工艺系统的稳定,同时使离心压缩机自身性能严重恶化。喘振会使离心压缩机振动时损坏零部件,尤其是其轴承、密封环等;同时还可能使油膜密封的油气压差失调,破坏油膜密封系统。喘振会破坏离心压缩机机组原有设计的安装质量,使机组各部件间隙发生变化,还会使流道系统上的压力表和入口处流量表示数发生大幅度的摆动或使部分仪表失灵。
1 离心压缩机喘振特性
1.1 喘振的产生
喘振的影响因素较为复杂。诱发喘振的直接原因是机组及管网系统的动力学不稳定造成的,包括内部因素和外部因素。内部因素与离心压缩机叶轮或扩压器的气流分离及旋转失速有关。当离心压缩机的入口流量减少到一定程度时,其内部气体的流动情况因失速区的产生与发展而引起喘振[2]。外部因素主要与离心压缩机的入口流量和管网系统的负荷有关,同时还与压缩机的转速、被加压气体的温度、压力、气体分子量以及管网阻力和管网容量有直接关系。当管网压力大于压缩机的排气压力,会造成气体从管网倒流回离心压缩机,并产生周期性的低频率、大幅度的气流脉动。诱发喘振的因素很多,喘振的发生经常是多种因素综合作用的结果[3]。
1.2 防喘振控制工艺
包头钢铁公司燃气厂煤气加压站2台煤气压缩机,每台配接电机功率315 kW,采用2台变频器驱动。运行方式采用一台工频恒速运行,另一台根据PI调节器的输出值变频恒压运行。防喘振控制策略采取固定极限流量法。防喘振阀(回流阀)的开度控制采用常规PI控制方法。机组实际运行中喘振的发生较为频繁,危害严重,甚至发生煤气外泄等恶性事故[4]。在对目前国内外主流的防喘振控制技术进行深入研究和借鉴的基础上,2台离心压缩机的防喘振控制方法采用同步变频恒压逼近的控制策略;在防喘振阀开度的控制策略上构造Fuzzy-PI双模控制器。
2 压缩机防喘振控制系统原理
2.1 主动控制方式
主动控制技术是直接从诱发喘振的旋转失速和系统失稳等内部因素着眼,采取措施来抑制诱发喘振的各种因素[5]。主动控制技术充分发挥了离心压缩机的性能,拓宽了系统稳定运行范畴。
现在防喘振主动控制方法大都采用PID模型,使用的执行机构较多,如返回阀、放风阀、回流阀、开度阀等。采用传统的PID控制算法,需要建立精确的数学模型,鉴于离心式压缩机PID控制器的数学模型难以构建,只有采用先进控制技术,才能更加准确地避免喘振发生[6]。压缩机的主动控制方式虽然是目前研究的潮流,但是其真正的实践应用却尚未普及,仍处于实验室研究阶段。
2.2 被动控制方式
在大型系统的压缩机防喘振控制方式中,目前均采取被动控制方法。常用的被动控制方法分为固定极限流量法与可变极限流量法2种[7]。
1)固定极限流量法就是使离心式压缩机的入口流量始终控制在大于某一个定值流量,如图1中的Q1,从而避免压缩机进入喘振线左侧区域(喘振区)运行。固定极限流量法控制方法简单,一般适用于固定转速的系统。缺点是当压缩机在转速较低的范围内运行时,会造成防喘振阀过早打开且打开次数增加。这种现象造成不必要的回流循环,能量浪费严重。

图1 固定极限流量法原理图Fig.1 Principle diagram of fixed limit flow method
2)可变极限流量法是通过调速来改变的,因为不同转速工况下其极限喘振流量是1个变数,它随转速的下降而变小,通常留有一定安全裕量S,使防喘振调节器沿着控制线工作,其防喘振原理如图2所示。

图2 可变极限流量法原理图Fig.2 Principle diagram of variable limit flow method
3 压缩机防喘振控制系统的改进
同步变频保持恒压状态的防喘振控制特性曲线如图3所示。图3中的n1~n4性能曲线是2台离心压缩机并联运行、同步变频的性能曲线。
3.1 同步变频恒压逼近喘振线的控制策略
图3中的喘振线是2台离心压缩机在不同转速下同步运行的喘振线。横坐标为压缩机的出口流量Q,纵坐标为压缩机的出口压力与入口压力的比值P1/P2。压缩机正常应该运行在喘振线的右侧区域(稳定区),采用2台变频器同步变频调速控制方式,并保持恒压状态。若按照可变极限流量法进行控制,当压缩机以最低转速n4运行到警报线A点,并继续向B点移动时,此时安全裕量S=AC。防喘振控制系统改进后,沿着恒压状态线P由A点向D点运行,此时安全裕量S=AD。按照与警报线安全裕量相同的原则进行改进,采用同步变频恒压逼近喘振线的控制策略,喘振安全裕量S=DE=AC,其工作点由A点向左移动到E点(AE=CD)时防喘振阀才应动作。这样形成了1条新的变频恒压防喘振控制线,改进后2台离心压缩机的稳定区较之前有了进一步的扩大,离心压缩机的性能和效率大大提高。
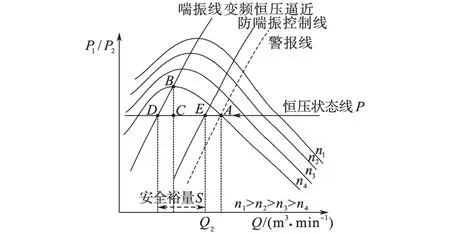
图3 同步变频恒压逼近的防喘振控制特性曲线Fig.3 The anti-surge characteristic curves of synchronous frequency conversion and constant pressure approximation
3.2 回流阀开度控制的Fuzzy-PI双模控制策略
对于单纯的PI控制器系统,在实际运行过程中发现,2台压缩机的同步性较差,控制的超调量大,调节时间较长,控制效果不够理想。通常的二维模糊控制器具有良好的动态性能、鲁棒性强,但存在着稳态误差无法消除的缺点。因此,可以将PI控制器与模糊控制器结合起来构成双模控制器,采用的Fuzzy-PI双模控制同时具备PI控制的稳态性能和模糊控制的动态性能,起到良好的控制效果[8]。
将模糊控制器FC和PI控制器并联起来,并由控制开关根据压缩机的实际运行状态进行模式选择,其结构如图4所示[9]。

图4 模糊-PI双模控制系统结构Fig.4 Structure of Fuzzy-PI dual-mode control system
无论是PI控制还是模糊控制,都是进入E点以内才开始控制离心压缩机的回流阀开度,当压缩机运行区域进入E点较多,即偏差较大时采用模糊控制调节回流阀开度,模糊控制的动态性能好,响应速度快,但是稳态精度低;进入E点较小时,即偏差较小时采用PI控制调节回流阀开度,PI控制的特性是稳态精度好,但是动态响应慢。
4 控制系统的设计
防喘振控制系统为了适应各种层次工业自动化网络的不同需要,控制网络结构体系大体分为3个层次:设备层、监控层和信息处理层。图5所示为控制网络系统的结构体系示意图。

图5 控制网络拓扑结构图Fig.5 The network structure of the control system
当今企业控制网络以现场总线为主流控制技术,设备层的功能是将现场设备以网络节点的形式挂接在现场总线网络上,传送监控中心的命令进行操作[10]。由于本项目是一个改进项目,大量底层设备需要利旧,设备层大致分为3类,分别是:支持Profibus-DP设备、支持Modbus协议和非DP设备,设备层作为DP从站集成到控制系统中。Profibus-DP现场总线作为监控系统的主干控制网络,原有支持Modbus协议的设备通过PBM协议转换传送到Profibus-DP网络,非DP设备通过西门子ET200M+I/O扩展模块集成到Profibus-DP网络。
监控层的主要任务是完成设备层的信息采集和控制、对PLC进行本地监控以及完成对控制系统功能设定、报警和打印等功能。控制主站选择西门子PLC(programmer logic controller),具体型号为CPU412-3H。PLC作为监视主站,使用Profibus-DP协议总线主要完成各工艺环节程序的运行、对Profibus-DP网络各DP从站数据的实时采集和控制。
信息处理层是通过给CPU412-3H配置专用的以太网通信处理器CP443-1,将CPU412-3H主站内的监控数据有选择性的集成到企业局域网中。使管理层能够实时地实现远程的监控、调度和管理任务。
在系统正常运行时,闭环变频控制系统根据下游用户工艺的变化,及时调节管网中的煤气流量保持恒压状态,以满足用户的实际需求。在控制主站S7-400 PLC中设置PI参数,PI控制模块的输出信号传送给2台G120变频器,使其对2台并联运行的离心式压缩机的转速同时进行控制。
在整个控制系统中存在着许多物理量,如温度、压力、静叶角、流量以及电机的转速[11]。为了满足企业管控一体的任务需求,煤气加压站监控系统的数据信息必须能够无缝地融合到先期建成的企业局域网,并且通过工业以太网将系统处理过的实时信息无缝连接到工业控制网络,以形成企业级管控一体化的全开放网络。
5 模糊-PI双模控制器的设计与实现
5.1 模糊-PI双模控制器的构造
防喘振阀开度模糊-PI双模控制器由PI控制器和模糊控制器2部分组成,二者由控制算法切换开关转换,PI调节器和模糊控制器都是通过PLC编程来实现,这样极大提高了系统的可靠性,能获得良好的控制效果,模糊-PI双模控制器原理结构框图如图6所示。

图6 模糊-PI双模控制器原理结构框图Fig.6 The block diagram of the fuzzy-PI dual-mode controller
模糊控制器采用二维结构,反馈流量值与给定流量值的偏差e和偏差的变化率ec作为模糊推理部分的2个输入信号,通过模糊化、模糊逻辑推理、去模糊化等一系列工作操作,最终得到模糊控制器输出信号u。模糊推理部分的输入变量e和ec,模糊论域为[-6,6],选取三角形为隶属度函数曲线。输出变量为u,模糊论域为[-10,10]。输入变量e选取6个模糊子集{负大,负中,负小,正小,正中,正大},相应表示为{NB NM NS PS PM PB};将输入变量ec选取5个模糊子集{负大,负小,零,正小,正大},相应表示为{NB NS ZO PS PB};输出变量u选取7个模糊子集{负大,负中,负小,零,正小,正中,正大},相应表示为{NB NM NS ZO PS PM PB}。
5.2 模糊规则设计
模糊规则中蕴含着人类大脑模糊的、丰富的经验判断,一组好的控制规则决定了模糊控制器的性能。根据偏差和偏差变化率的不同状态、工程设计人员的技术知识和实际操作经验进行修正,建立合适的模糊规则表,最终获取的模糊控制规则如表1所示[12]。
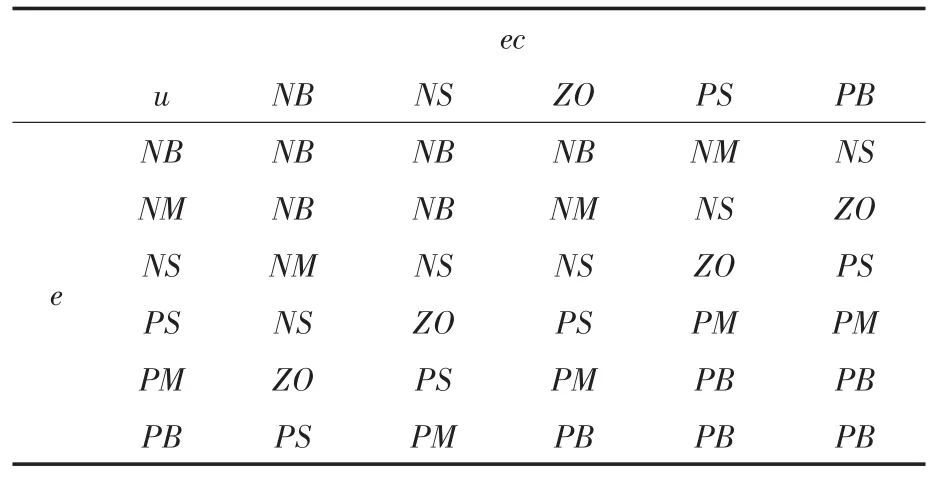
表1 模糊-PI双模控制器的模糊控制规则表Tab.1 Fuzzy control rule table of Fuzzy-PI dual-mode controller
5.3 模糊-PI控制算法的PLC实现
在模糊-PI控制器的设计上,是不需要增加另外的硬件和软件开销,PI控制器和模糊控制器均是直接采用Profibus-DP现场总线上的CPU412-3H PLC实现其控制功能,这样可以提高系统的可靠性,同时节约开发成本。CPU412-3H内集成有多个PID模块,可通过PID编程向导或直接定义和填写PID控制回路参数表,就可以快速地为防喘振阀开度控制设计1个PI控制器。
为提高系统的实时性,减少PLC算法的程序量,首先借助于Matlab提供的模糊逻辑工具箱直接获取模糊控制查询表(模糊控制的输出结果),并将该表存储于PLC的DB数据块内,当压缩机运行区域进入E点以内时,PLC根据模糊控制器开始动作的流量值(图3 E点对应的流量Q2)再利用事先编好的模糊控制规则表,经过去模糊化直接获得模糊推理部分最终的输出值u。
6 防喘振控制系统的对比仿真
在Matlab中用Simulink进行仿真,分别采集PI控制器和模糊-PI双模控制器对相同的被控对象进行了对比。仿真结果表明,在系统运行过程中受到流量变化信号的干扰,模糊-PI双模要比PI控制效果更加理想。得出的仿真波形如图7所示,其中实线为模糊-PI双模控制器仿真系统结果,虚线为PI控制阶跃响应曲线。

图7 模糊-PI双模与PI的阶跃响应曲线Fig.7 Step response curves of Fuzzy-PI dual-mode and PI control
改进的防喘振控制系统投入运行后,生产统计数据表明,2台压缩机的喘振次数由每个月平均15次减少到平均1次,机组的安全运行工作区间和时间大为增加,工作效率全面提升。每个月机组通过防喘振阀的入口回流流量平均降低了91%,节约了大量的能源,经济效益显著提高。
7 结论
2台同步变频并联运行的压缩机,较之前的运行方式极大地避免了在低频小流量情况下喘振的发生。在接近防喘振控制线采用同步变频恒压逼近的控制策略,与固定极限流量法和可变极限流量法相比,进一步扩大了机组的稳定运行区,提高了压缩机的性能和效率。在回流阀开度的控制方法上采取模糊-PI双模控制策略,将模糊控制动态响应速度快和常规PI控制精度高的优点得以完美结合。与常规PI控制器相比,模糊-PI双模控制器能很好地解决前者上升时间长、超调量大的缺点,在发生喘振时对回流阀的控制在实时性、可靠性、自动化水平上均得到较大的改善。
[1]徐慧敏.基于模糊控制的离心式压缩机防喘振控制系统的研究[D].杭州:浙江工业大学,2006.
[2]Almasi A.Latest Techniques and Practical Notes on Antisurge Systems for Centrifugal Compressors[J].Australian Journal of Mechanical Engineering,2012,10(1):81-90.
[3]Arnulfi G L,Blanchini F,Giannattasio P,et al.Extensive Study on the Control of Centrifugal Compressor Surge[J].Proceedings of the Institution of Mechanical Engineers,Part A:Journal of Power and Energy,2006(3):289-304.
[4]黄丽梅,李鸣,张宇.基于PLC的鼓风机防喘振控制系统[J].电气传动,2012,42(8):73-76.
[5]林舒.高炉风机防喘振优化控制研究[D].杭州:浙江大学,2014.
[6]Woo Zhi-wei,Chung Hung-Yuan,Lin Jin-Jye.A PID Type Fuzzy Controller with Self-tuning Scaling Factors[J].Fuzzy Sets and Systems,2000,11(5):162-168.
[7]陈欣.压缩机防喘振控制策略综述[J].石油化工自动化,2011,47(1):47-50.
[8]林辉,马成禄.感应电机直接转矩控制系统中的模糊控制研究[J].电子设计工程,2009,17(3):120-121.
[9]谢仕宏.Matlab控制系统动态仿真实训教程[M].北京:化学工业出版社,2009.
[10]付华,孙树生.基于PLC和模糊控制的矿井供风系统的改进方法研究[J].煤矿机械,2006,27(1):139-141.
[11]崔坚.西门子工业网络通信指南[M].北京:机械工业出版社,2004.
[12]张省伟,林辉.一种模糊-PI双模控制系统的仿真与设计[J].电子设计工程,2011,19(2):37-39.
Research on Control Method of Anti-surge System for Multiple Compressors
TIAN Hai,LIU Chengshu
(Information Engineering College,Inner Mongolia University of Science and Technology,Baotou 014010,Nei Monggol,China)
In view of the problem that two centrifugal compressors running in parallel are easy to surge in a gas pressure station of baotou steel corp,the improvement was done for the original anti-surge control system,according to the anti-surge control system principle.The two compressors had been changed from the working mode that one works on power frequency and the other works on variable frequency to the new working mode that both work on synchronous frequency conversion.In the flow of anti-surge line,the control strategy of variable frequency constant pressure approximation was adopt,operating frequencies of the anti-surge valve were reduced effectively and reflux flow inlet was also reduced.For control method of opening of the anti-surge valve,the Fuzzy-PI dual-mode control was adopted,and the dynamic performance and steady state performance of the system were obtained.The effectiveness of the control is proved by comparing the simulation results.
centrifugalcompressor;surge;synchronousfrequencyconversion;dual-modecontrol;Matlabsimulation
TP273
A
10.19457/j.1001-2095.20171013
内蒙古自治区自然科学基金资助(2017MS0603)
田海(1968-),男,硕士,副教授,Email:tian680125@163.com
2016-10-24
修改稿日期:2017-01-11
