市政排水管道清淤技术浅谈
2017-11-01李婧琳缑变彩杨志远
李婧琳 缑变彩 杨志远
(1.武汉科技大学城市学院,湖北 武汉 430080; 2.武汉中地数码科技有限公司,湖北 武汉 430070)
市政排水管道清淤技术浅谈
李婧琳1缑变彩1杨志远2
(1.武汉科技大学城市学院,湖北 武汉 430080; 2.武汉中地数码科技有限公司,湖北 武汉 430070)
结合当前市政排水管道普遍存在的淤积堵塞现象,介绍了市政管道的绞车清淤法、高压水射流清淤法、水冲刷清淤法等传统清淤技术以及以蠕动式、履带式、脚式和轮式四种方式行走机器人清淤新技术,通过对比分析,阐明了市政排水管道清淤技术发展的新方向。
排水管道,清淤技术,管道机器人
市政排水管道系统是当今城市非常重要的基础设施,为了给人们提供一个安全舒适的生产和生活环境,排水管道系统就必须做到有效地收集和输送生活污水、工业废水和大气降水,并及时可靠地将其排除,但是随着城市的不断发展以及管道的长期运行,淤积堵塞导致的排水不畅愈加严重[1],从而对城市的正常运行带来很大的影响,在汛期甚至会引起严重的城市内涝。所以,对淤积物及时进行清理就显得尤为重要。
1 传统清淤技术
结合实践经验,传统的管道清淤方法有以下三种,现分别进行介绍。
1.1绞车清淤法
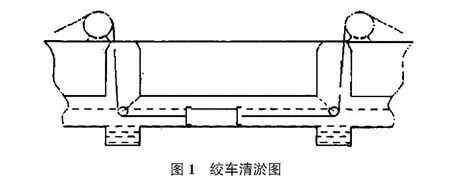
绞车清淤法也叫机械清淤法,该方法要求先用竹片穿过待清通管道,通过拖拽竹片一端,将系在竹片另一端的钢丝绳带动从而穿过管段。钢丝绳中部绑定清通工具,两端分别系在待清通管段的两侧检查井上的两台绞车上,通过启动绞车来回往复拉动钢丝绳来带动清通工具将淤泥刮至下游检查井,然后用吸泥车吸走,其原理如图1所示。
这种清淤方法能解决管道淤积严重,淤泥粘结密实的情况,而且能够适应各种直径的排水管道,所以在我国广泛使用。存在的主要缺点是从一个井口向另一个井口穿竹片需人工下井完成,井下非常恶劣的工作环境给工人带来极大不便,危害工人的健康,甚至会危及工人的生命。因此,只要穿钢缆的问题能解决,这种方法还是比较有效的[2]。
1.2高压水射流清淤法
这也是被广泛采用的一种管道清淤法。通过用增压车,将水加压后送入射水喷头冲洗管道壁,将管道内的沉积物冲到下游检查井,再由吸泥车将其吸走。另一方面,由于污泥的存在,射水产生较大的反作用力,使射水喷头及其携带的胶管同时向相反方向前进,从而实现连续作业。这种方法适用于各种口径的下水管道,但由于用水量大,成本相对比较高[3]。
1.3水冲刷清淤法
起源于欧洲的排水管道水力冲刷技术现已相对成熟,该方法通过蓄水、瞬时排水两个过程不断循环,完成清淤工作。其中蓄水过程是将流经管道内的污水予以拦截,当蓄水量达到规定要求时,立即启动排水过程,使得蓄水在瞬间排除,该过程形成强大的水流能对管底淤积物产生冲刷作用进而被带走[4]。但是由于国内的排水管道源头控制不善等原因造成污水中缠绕性垃圾较多导致蓄水不足、排水不畅而使其丧失既有功能。
2 机器人清淤技术
由于传统的清淤方法存在的各种问题,工程师们开始寻求一种全新的清淤理念,清淤机器人应运而生。采用机器人进行清淤,是当前研究的一个热点。管道机器人,是专为管道清淤作业而设计的一种新型机械设备,除机械部分以外,还设有监控通讯设备和清淤装置,依靠这些先进技术,可以实现地面操作机器人在管道中行走并有针对性地完成清淤工作,解决传统清淤工作的诸多难题,为更有效地完成排水管道的清淤疏通工作提供了新的解决方案[5]。
根据在管道内的行走方式不同,清淤机器人分为蠕动式、履带式、脚式和轮式等,现分别对其加以介绍:
1)蠕动式清淤机器人。蠕动式清淤机器人由自身的结构相互配合,使其能够像蚯蚓一样利用腹部与管壁的摩擦前进,并以此摩擦力对管壁的污泥予以清理。但其要求管壁光滑,而我国大多数混凝土材料的排水管管壁相对粗糙,此方式并不适用[6]。
2)履带式清淤机器人。履带式清淤机器人是通过履带行走,越障能力非常强,在泥泞的环境中也能移动,但是履带的结构复杂,而且受到功率、负载和空间等条件的制约,履带式管道机器人主要应用于中、大管径的管道[7]。
3)脚式清淤机器人。由美国的Auotmatik公司研制,命名为ITGRE的脚式管道清淤机器人,其基本工作原理是通过腿推压管道壁来支撑身体,再利用装有弹簧的倾斜支撑臂把腿上的车轮紧压在管道内壁上,使其产生预压力,利用软轴将扭矩作用使机器人向前行走[8],这种方式可以轻松地越过障碍物,便于在各种形状的管道内行走,适合在400 mm~900 mm的可变直径的管道中工作。由于其结构复杂,行走较慢,效率较低,尚处于理论研究当中。
4)轮式清淤机器人。轮式管道机器人由佛罗里达大学于21世纪初成功研发,命名为OPCR-OH,车轮紧贴管壁,对称分布,对管壁产生较大压力,爬坡力强,能沿着各个方向行走,应用较为广泛。
清淤机器人通过以上四种方式实现在管道中行走,其目的是为了清理不同管段的淤泥,为了达到这一目的,机器人往往还需具备如清淤斗、清淤螺旋等除泥设备,这些设备通过自动控制进行作业,理论上能够实现疏浚管道的目的。
除此之外,清淤机器人有效地作业还应满足以下几个要求:
1)在管道的污水和污泥环境中保持密闭,因此机器人本体一般会采用一体化箱体结构设计;2)需要电源,除了为机器人行走提供动力外,还向监控系统提供电源以及为清淤设备运行提供动力,往往采用内置蓄电池供电;3)需要通讯系统以便很好地对清淤机器人进行控制。为了减少电缆与管壁之间的摩擦,可采用无线通讯系统,机器人的作业行程及运动灵活性均得到提高[9]。
3 结语
我国排水管道清淤工作目前较多地采用传统清淤方式,对于清淤机器人的研究和应用也在不断进行,其发展有赖于机械以及通讯技术的进步,其使用将会大大提高清淤作业的自动化水平,改善传统清淤技术的诸多弊端,具有广阔的市场推广前景。
[1] 李华飞.大管径排水管道水力清淤技术研究[D].重庆:重庆大学,2012:2-3.
[2] 杨清梅,王立权,王知行.一种新型排水管道机器人研究[J].机床与液压,2006(3):120-122.
[3] 边艳玲,董 巍.排水管道中的清淤方法[J].黑龙江水利科技,2003(3):95.
[4] 刘振华,李怀正,董梦珂.排水管道沉积物水力冲刷技术[J].科技创新与应用,2015:1-2.
[5] 李成群,么鸿鹏,张净霞.自主式管道清淤机器人的研究[J].机床与液压,2015,43(15):51-52.
[6] Ma Jian Xu, Liu Xiang, Ma Jian Hua, et al. Microbionic and peristaltic robots in a pipe[J].Chinese Science Bulletin,2000,45(11):985-988.
[7] 么鸿鹏.自主式排水管道清淤机器人的研究[D].唐山:河北联合大学,2012:7-10.
[8] 沈体强.城市排水管道清淤机器人研究综述[J].山东工业技术,2016(20):289.
[9] 王 丰,秦保新,刘学东.无缆式城市排水管道清淤机器人的通讯设计[J].机床与液压,2009(5):101-103.
Discussionondredgingtechnologyofmunicipaldrainagepipeline
LiJinglin1GouBiancai1YangZhiyuan2
(1.CityCollege,WuhanUniversityofScienceandTechnology,Wuhan430080,China;2.ZhongdiCyberTechnologyCo.,Ltd,Wuhan430070,China)
Combined with the current clogging of municipal drainage pipelines, the traditional dredging techniques and the robot dredging techniques are introduced. Traditional methods include mechanical dredging, high pressure water dredging and water scouring and dredging method. The new technology of dredging robot is carried out in four ways: crawling, caterpillar, foot and wheel. The new development direction of municipal drainage pipeline dredging technology is expounded by the contrast analysis.
drainage pipeline, dredging technique, pipeline robot
TU992.1
A
1009-6825(2017)27-0104-02
2017-07-13
李婧琳(1984- ),女,助教
