基于ARX模型四旋翼飞行器的LQR控制方法
2017-11-01刘丽丽左继红
刘丽丽,左继红
(1.中南大学 信息科学与工程学院,长沙 410083; 2.湖南铁道职业技术学院,湖南 株洲 412001)
基于ARX模型四旋翼飞行器的LQR控制方法
刘丽丽1,2,左继红1,2
(1.中南大学 信息科学与工程学院,长沙 410083; 2.湖南铁道职业技术学院,湖南 株洲 412001)
四旋翼飞行器飞行过程中具有非线性和强耦合性,导致难以建立精确的物理力学模型,针对这个难题,提出了基于多个ARX模型四旋翼飞行器的LQR控制器设计方法;ARX模型全称是带外生变量的自回归模型,LQR控制器一种基于局部线性化模型的无限时域预测控制器;该法首先基于四旋翼飞行器的动力学特性构建四旋翼飞行器多个ARX的模型结构,并利用结构化非线性参数优化方法辨识模型参数,获取满足工程精度需求的四旋翼非线性动态模型;然后,基于该模型给出了具有状态反馈的LQR控制器设计方法,并通过求解工作点的Riccati方程,获得状态反馈矩阵,最后通过仿真和实时控制结果验证了所提方法的有效性和可靠性。
四旋翼飞行器;ARX模型;LQR控制;非线性
0 引言
四旋翼飞行器是一种由4个独立电机驱动的螺旋桨组成的6自由度(位置与姿态)欠驱动系统,具有垂直起降、结构简单、操纵方便及灵活机动等优点,广泛应用于搜救、航拍与侦察等军事和民用领域[1]。四旋翼飞行器的控制主要包括姿态控制和位置控制,且位置的改变是由于姿态的变化引起的,故姿态控制是四旋翼飞行器控制系统的核心,其控制性能优劣直接决定了飞行器的飞行性能。
为了实现四旋翼飞行器飞行姿态的稳定控制,国内外学者做了大量的研究工作。近年来的研究呈多样性,如采用PID控制和LQ控制方法共同实现四旋翼飞行器的控制[2]、飞行姿态自适应控制的 PD2研究[3-4]、将鲁棒非线性PI控制策略和backstepping技术相结合的控制方法[5]、采用滑模技术的飞行姿态的跟踪控制反馈控制算法[6]、为降低模型精确性对姿态控制的影响,有些文献讨论了基于神经网络的控制器设计方法,如基于神经网络在线提供有限脉冲响应系数的PID控制方法[7-8]。然而,这些方法大多基于系统物理力学模型进行设计,而由于四旋翼在飞行过程中,不仅受到空气动力、重力和陀螺效应等多种物理效应作用外,还受制于气流等外部环境的干扰[9-10],难以建立准确的数学模型,使得传统的基于物理力学模型的四旋翼姿态控制设计方法在实际应用时效果有限[11-14]。
为此,提出了一种基于ARX(AutoRegressive model with exogenous variable)模型组的自适应LQR(linear-quadratic regulator)控制方案[15]。通过对飞行器的飞行状态进行区间分化,在每个区间内,采用非线性参数优化方法辨识模型参数,获取满足工程精度需求的四旋翼非线性动态模型。然后,基于该模型设计了具有状态反馈的LQR控制器,并通过求解工作点的Riccati方程,获得该区间内状态反馈矩阵, 并建立状态反馈控制,在局部线性区间内得到理想的控制效果,每个局部区间内的模型辨识与最优控制律完成后,设计一种具有切换特性的自适应控制器,最终使得飞行器在其整个状态空间内良好运行。
1 四旋翼飞行器控制系统
本文所研究的四旋翼飞行器是由呈交叉对称结构的四个带直流电机的螺旋桨组成,如图1所示,型号是固高GHP3001,采用GT-400-SV运动控制器,电机采24 V 5000RPM永磁直流电机,电机提供飞行动力,PC机和运动控制卡交换数据,采用MATLAB的SIMULINK模块控制平台实时控制电机电压。由绕Y轴旋转的俯仰角(pitch)、绕X轴旋转的翻转角(roll)和绕Z轴旋转的巡航角(yaw)来定位飞行器的飞行姿态输出。其物理参数如表1所示。很明显,四旋翼飞行器是一个具有四输入三输出的非线性耦合系统,4个电机的输入电压是其4个输入,由于系统的硬件约束,电机控制电压范围为[-20,+20] V。
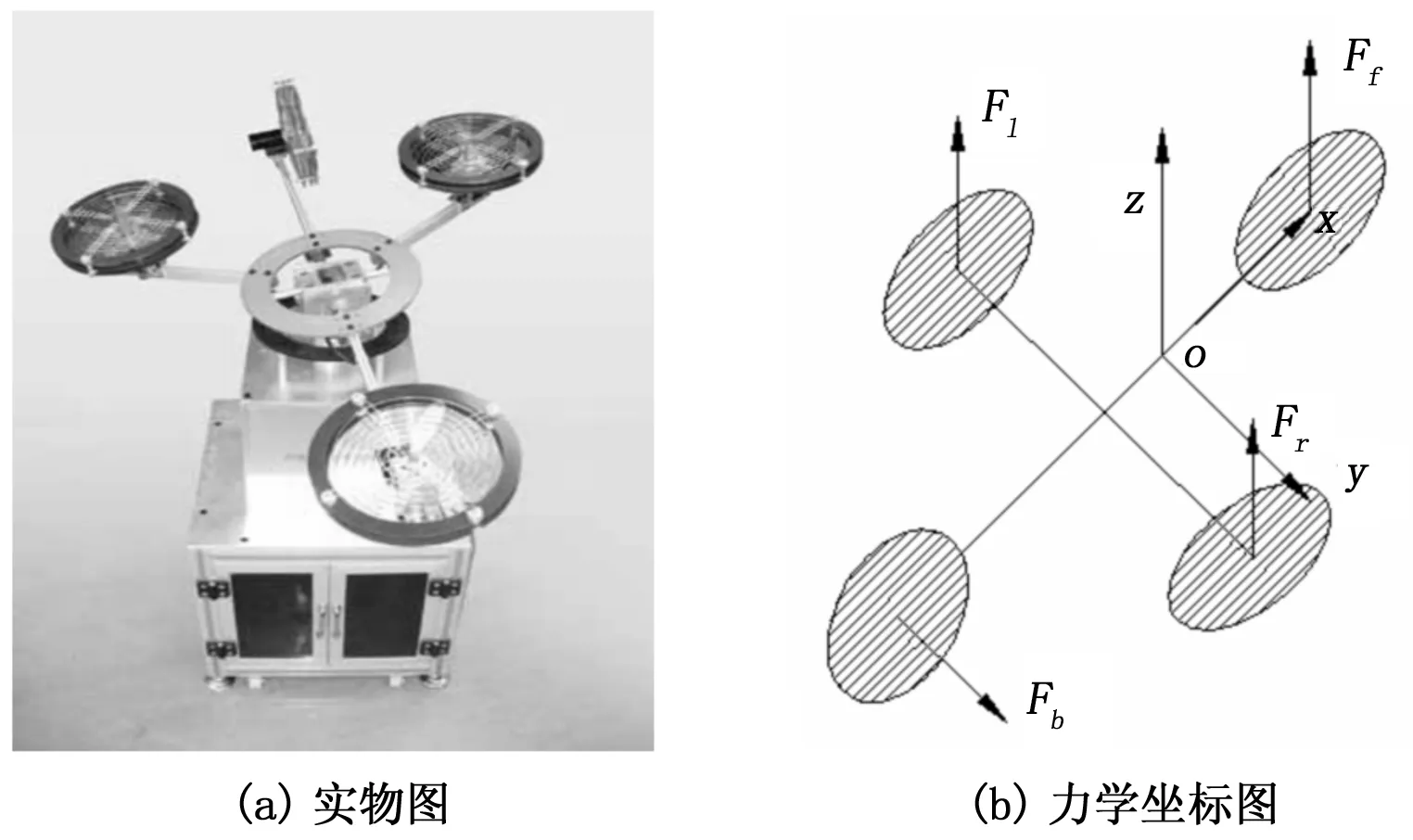
图1 四旋翼飞行器物理结构图
2 ARX模型组的建模、辨识和结果分析
2.1 ARX模型组建模
为了描述飞行器系统的全局非线性,采取多个线性模型去逼近对象的全局模型,将全局划分为多个工作区间,每个区间用一个ARX模型建模,就会得到一组ARX模型。四旋翼飞行器的非线性耦合特性主要与决定飞行姿态的翻转角和俯仰角有关。故根据俯仰角和翻转角的区间分布,采用下式将系统的输出区间均衡分成16个区域。
(1)
式中,n代表区域编号,fix()为取整函数。显然俯仰角和翻转角在相应工作区间都可以分成4个区域,这些区域相互交叉,共组成16个区间。在每个工作区,按照同样的方法建模、辨识出局部ARX模型。
ARX模型是一种常用的线性自回归模型。它利用过去有限个输出与输入,建立起其当前时刻的输出的关系。它的结构是:
y(t)+a1(t-1)+…+anay(t-na)=
b1u(t-d)+…+bnbu(t-d-nb+1)+e(t)
(2)
其中:na,nb分别是系统阶次,d是输入到输出的延时。
对于多输入多输出四旋翼飞行器系统,它的局部线性ARX模型结构是:
Y(t)+A1Y(t-1)+…+AnaY(t-na)=
B1u(t-d)+…+Bnbu(t-d-nb+1)+e(t)
(3)
式中,Y(t)=[p(t)r(t)y(t)]T为输出俯仰角、翻转角和巡航角,输入u(t)=[Vf(t)Vr(t)Vl(t)Vb(t)]T包括四个电机的控制电压,na、nb和d是模型的阶次,系数矩阵Ak和Bk为:
ny和nu为输入和输出的个数,对于四旋翼飞行器,ny=4,nu=3。
2.2 系统模型的辨识和结果分析
模型辨识过程,需要对na、nb、d这三个参数进行选择,选择方法有损失函数检验法、残差白性检验法、AIC(Akaike Information Criterion)信息准则法等。本文采用AIC信息准则法[16],该法常用来定阶和估计相应参数值,效果良好,其表达式为:

(4)

针对飞行器,AIC的计算式如下:

(5)

为了验证ARX模型的有效性,采样基于物理模型LQR控制的四旋翼飞行器实时运行的数据来辨识和测试模型,采样周期为0.1 s。因螺旋桨有一定的惯性,到达给定转速有一定的延迟,故应选取d>1,实际中选取d=2,效果比较好。采集模型辨识数据时,先使飞行器在某一状态点稳定,然后,在给定值上叠加一小幅的扰动,使得飞行器在给定值的小范围内抖动,以得到有效数据,在实际操作时,叠加的扰动为白噪声序列。
得到辨识数据后,选取不同的阶次,比较不同阶次下模型的AIC值,AIC值最小时的模型阶次:na=3,nb=1。
图2为ARX模型对四旋翼飞行器测试数据的建模效果。
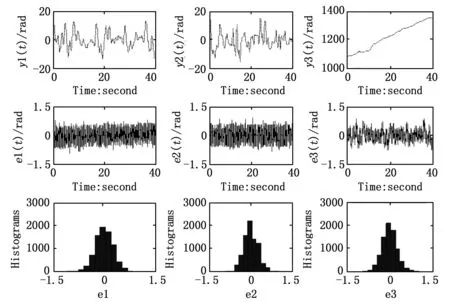
图2 ARX模型的建模精度
图2中,y(1)t,y(2)t,y(3)t分别是俯仰角、翻转角和巡航角的实际输出和模型预测输出,单位是rad;e(1)t,e(2)t,e(3)t分别代表相应输出角实际和期望输出的误差,应残差直方图来观察误差分布情况。可以看出,ARX模型下系统实际输出很好的跟随期望输出,误差波动在很小范围内且成高斯状分布,表明模型比较理想,具有优良的建模精度,能很好地描述系统的非线性动态特性。
3 基于ARX模型组的LQR控制策略和控制结果分析
3.1 基于ARX模型组的LQR控制策略
LQR是线性二次型最优控制,在控制工程中,其问题可以描述为:
(6)
式中,x为n维状态,u为p维输入,A和B为相应维数系数矩阵。
通过求解Riccati方程:
ATS+SA-(SB+N)R-1(BTS+NT)+Q=0
(7)
得到最优状态反馈矩阵:
K=R-1(BTS+NT)
(8)
通过建立状态反馈来进行对系统的控制。
求解LQR问题必须满足的前提条件为:
1)(A,B)是可控的;
2)R=RT>0;
3)Q=QT>0;
4){A,Q1/2}完全能观测。
首先需要将ARX模型转化成状态方程。式(1)可以转化为如式(9)所示状态方程[17],式中n是na和nb中较大的一项,an和bn中多于实际值的项用0代替。
(9)
对于式(2)的MIMO系统可以相应做出扩展,结果如下:
(10)
其中:
其中:aij,k和bij,k是(2)式中Ak和Bk中对应的元素。同样,n是na和nb中较大的一项。
实际中,为了保证稳态误差,在构造状态方程时,可扩展出一个积分状态量,用来对输出进行积分运算。需将aii进行如下调整,并且其他的相关参数用0的行或列来扩展。
(11)
通过式(10)中的A和B,通过辨识数据求得各个状态量,并搭建出状态反馈。选取Q和R为对角阵,Q中第i行第i列的数值大小表示对第i个状态量的优化权重,R中第i列第i行的数值表示对第i个输入量的优化权重。
显然A是可观测的,并且Q和R都满足LQR问题求解的前提条件。利用Matlab中的Control System Toolbox中的lqrd命令可以得到离散时间最优状态反馈K。
在每个区间都有个ARX模型,都有其特有的状态观测器和状态反馈矩阵K。因此,设计一个根据实时运行状态来选取合适区域化模型的自适应控制器是可行的。
采用离线辨识模型得到ARX模型,转化为状态方程,选取合适的Q和R矩阵求解LQR问题,建立状态反馈控制。需确定Q,对状态方程(8)中C的系数为1的状态量给予足够的优化,选取10较优,其它的系数为1。因为物理条件的限制,输入在有限范围内,所以选取R的对角阵元素也为1。
3.2 基于ARX模型组LQR实时控制结果
实时控制时,先在单个区域内调试出合适的状态反馈值,使得飞行器能在单个区间内能很好很快的达到稳定,然后再利用设计的控制器进行大范围的自适应控制。在控制输出时,可以根据加入微小的微分作用,减小系统的振荡效果。
控制周期定为0.1 s。因为在0.1 s内,飞行器动态特性变化比较小,计算最优控制律有足够的时间。实时控制的结果如图3~图6所示。
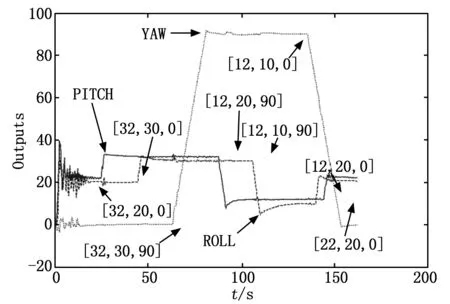
图3 基于ARX模型LQR实时控制输出结果
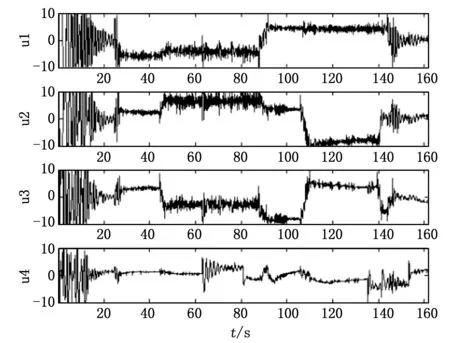
图4 实时控制时四个电机的输入信号
图3、图4是四旋翼飞行器四个输入电机电压和三个输出角随时间变化的控制曲线,图3括号中的数值分别代表俯仰角、翻转角和巡航角的控制目标值,箭头指的是控制目标值的时间范围,实线是俯仰角变化曲线,虚线是翻转角变化曲线,点线是巡航角变化曲线。
图3中四旋翼首先处于水平悬停姿态,即:俯仰角(p)、翻转角(r)和巡航角(y)分别为22、20和0;在20 s处,控制俯仰角由初始值22变为32,保持翻转角和巡航角不变;在43 s处,控制翻转角由初始值20变为30,保持俯仰角和巡航角不变;在60 s处,控制巡航角由初始值0变为90,保持俯仰角和翻转角不变;根据控制目标依次分别改变三个输出角,保持一段时间后,控制四旋翼飞行器达到另一目标飞行姿态,并保持一段时间,最终使四旋翼飞行器恢复初始水平悬停状态。
图3曲线显示,当输出姿态角分别变化时,基于ARX模型LQR控制策略的控制效果比较好。初始悬停状态,输出曲线略有小幅震荡,当姿态角目标值分别变化时,动态过程响应迅速,并且超调很小,在稳态阶段,基本没有超调和震荡,输出比较平稳。
为进一步说明基于ARX模型组LQR实时控制的优越性,控制飞行器基于物理模型和基于ARX模型组下LQR实时情况,图5和图6分别展示了两种模型下的控制效果。
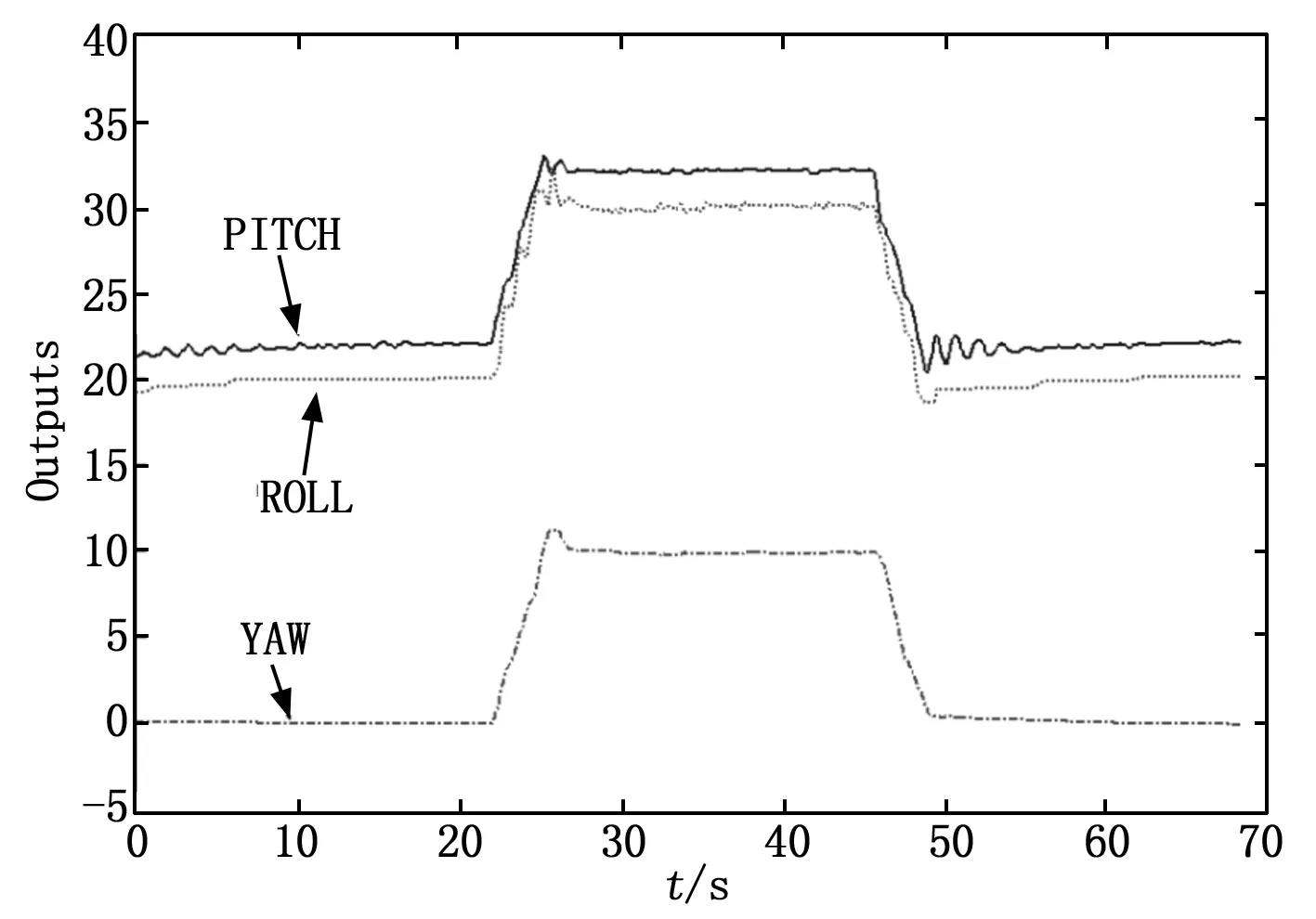
图6 基于ARX模型组的LQR实时控制效果
与图3跟踪信号不同,三个输出姿态角不是依次变化,而是同时变化。调整两种模型下控制器的参数到最优,并完成相同任务,即跟踪信号为四旋翼飞行器首先处于初始水平悬停姿态,维持一段时间后,控制四旋翼飞行器到达另一目标飞行姿态,并维持一段时间,最终回到初始水平悬停姿态。
通过对比分析图5和图6,从图5所示的基于物理模型的LQR实时控制曲线可以看出,在初始水平悬停姿态,输出曲线有较大的震荡;飞行器目标姿态突然变化后,虽然动态响应迅速,但超调较大,稳定到新姿态后稳态特性尚可;稳定一段时间重新回到初始水平悬停状态,输出曲线又出现了存在较大超调和振荡。原因是物理模型参数不够精确,是一个简化的模型,并且旋翼的非线性动态特性被简化为线性,无法保证在所有姿态下的控制都表现良好。
从图6所示的基于ARX模型组的LQR实时控制曲线可以看出,相比图6曲线,该建模及控制方法取得了较好的控制效果。如6图所示,在初始悬停位置,输出曲线震荡在很小幅度内,到达稳态后基本平稳,没有出现大幅震荡现象;控制输出姿态角突然变化后,其动态反应迅速,超调量明显比基于物理模型的控制策略小得多;回到初始水平悬停姿态后,并未出现大的振荡和超调现象。
总之,这种在多个线性区域上建立ARX模型,针对每个模型用LQR单独设计控制律,进而得到整体控制器的方法是可行的,且效果十分显著。
4 结语
本文提出了一种基于ARX模型的LQR方法控制器。针对其特性,将非线性模型空间划分为若干个子空间,在每个子空间中辨识出ARX模型,得到一组ARX模型,并设计LQR最优状态反馈控制器,实现对飞行器的整体最优控制。该方法在实际运行中,效果良好。
比起传统物理建模,该方法更具有针对性和精准性,并且实施并不困难。本文提出的方法是离线进行的,避免了在线运行所带来的一些致命问题,给设计者更充足的时间来考虑和分析问题。
[1] Wu J, Peng H, Chen Q.RBF-ARX model-based modeling and control of quadrotor[A]. Proc IEEE International Conference on Control Applications[C]. Yokohama, Japan, 2010: 1731-1736.
[2] Bouabdallah S,Noth A,Siegwart R.PID vs LQ Control Techniques Applied to an Indoor Micro Quadrotor[A]. Proceedings of the IEEE International Conference on Intelligent Robots and Systems[C].Sendai,Japan,2004:2451-2456.
[3] Tayebi A,Mcgilvray S. Attitude stabilization of a fourrotor aerial robot[A]. 43rd IEEE Conf Decision and Control[C]. Atlantis, Bahamas, 2004: 1216-1221.
[4] Erginer B,Altug E.Modeling and PD control of quadrotor VTOL vehicle[A]. Proceeding of the 2007 IEEE Intelligent Vehicles Symposium[C]. Turkey,2007.
[5] Zhang R, Quan Q,Cai K Y. Attitude control of a quadrotor aircraft subject to a class of time-varying disturbances[J]. IET Control Theory Applications, 2011,5(9): 1140-1146.
[6] Voos H.Nonlinear state-dependent Riccati equation control of a quadrotor UAV[A].Proc IEEE Int Conf Control Appl[C]. Munich, Germany, 2006: 2547-2552.
[7] Chen Y M,He Y L,Kong L B,et al.Decentralized PID neural network control for a quadrotor helicopter[J].Journal of Chinese Inertial Technology,2014, 22(2): 185-190.
[8] 刘焕晔.小型四旋翼飞行器飞行控制系统研究[D].上海:上海交通大学,2009.
[9] 郑伟光.四旋翼无人机飞行姿态控制系统研究[D].长春:长春理工大学,2010.
[10] 宿敬亚,樊鹏辉,蔡开元.四旋翼飞行器的非线性PID 姿态控制[J].北京航空航天大学学报,2011, 37( 9) : 1054-1055.
[11] 姜 强,曾 勇,等.四旋翼飞行器姿态航向参考系统设计与实现[J].控制工程,2013,20(5):168-172.
[12] 韩志凤,李荣冰,刘建业,小型四旋翼飞行器动力学模型优化[J].控制工程,2013,20(5):158-162.
[13] 管 萍,刘小河,汪赛等,基于模糊系统的高超声速飞行器预测控制[J].控制工程,2014,21(6):823-828.
[14] Yang Y N,Wang YQ.Internal model control- enhanced learning-type model predictive control: application to artificial pancreas[J]. Control Theory and Applications,2012,29(8): 1057-1062.
[15] 舒迪前.自适应控制[M].沈阳:东北大学出版社1993.
[16] 秦宣云,卜英勇,夏毅敏.基于AIC准则优化的径向神经网络微地形曲面重构[J].中南大学学报(自然科学版),2004(10):815-819.
[17] 徐 仲,张凯院,陆 全,等.矩阵论简明教程[M].北京:北京科学出版社,2001.
LQR Control for a Quad-Rotor Helicopter Based on ARX mode
Liu Lili1,2,Zuo Jihong1,2
(1.School of Information Science and Engineering, Central South University, Changsha 410083, China;2.Hunan College of Railway Professional Technology, Zhuzhou 412001, China)
The Quad-Rotor Helicopter which is nonlinear and coupled with each other makes it difficult to establish accurate physical mechanics model,for the problem,the design of LQR controller on Quad-Rotor Helicopter based on identified ARX mode were discussed.Using state-dependent AutoRegressive model with exogenous variable yields the ARX model, LQR controller is a predictive controller of infinite time domain based on local linear model.The structure of the Quad-Rotor Helicopter’identified ARX model based on dynamic properties was built firstly,and identify the model parameters using the structured nonlinear parameter optimization methods, obtain the Quad-Rotor Helicopter’s nonlinear dynamic model to meet the demand of engineering precision.then,the state feedback’s LQR controller based on the model was given, and by solving the Riccati equation of working point, the state feedback matrix was accessed. Finally, the simulation results and real time control verify the validity and reliability of the proposed method.
quad-rotor helicopter; ARX model ; LQR control; nonlinear
2017-02-19;
2017-03-08。
2015年度湖南省教育厅科学研究资助项目(15C0903);2015年度国家自然科学基金(61403045)。
刘丽丽(1985-),女,河南驻马店人,硕士研究生,工程师,主要从事控制科学与工程等方面的教学与科研工作。
1671-4598(2017)08-0068-04
10.16526/j.cnki.11-4762/tp.2017.08.018
TP18
A
