点式单波束多普勒测流系统的设计方法
2017-11-01蔡铭霞李木国
蔡铭霞,杜 海,李木国,丁 可
(1.大连理工大学 控制科学与工程学院,辽宁 大连 116024;2.大连理工大学 海岸与近海工程国家重点实验室,辽宁 大连 116024;3.DUT-UWA海洋工程联合研究中心,辽宁 大连 116024)
点式单波束多普勒测流系统的设计方法
蔡铭霞1,2,杜 海2,3,李木国2,3,丁 可1,2
(1.大连理工大学 控制科学与工程学院,辽宁 大连 116024;2.大连理工大学 海岸与近海工程国家重点实验室,辽宁 大连 116024;3.DUT-UWA海洋工程联合研究中心,辽宁 大连 116024)
为了加快多普勒流速计算速度和提高系统稳定性,提出基于FPGA技术的多普勒测速的设计方法,其中包括信号发射电路和信号接收电路;首先通过M码进行二相相移键控信号的调制,减少了回波误差、增加信号发射能量,有效地降低了水中超声波的能量耗散对信号提取的影响;然后对回波信号进行二相解调,并利用复自相关算法进行分析处理;最后,通过测速实验对所提方法进行验证;实验结果表明,所提方法不仅具有较低的实验误差而且具有较高的可靠性。
流速测量;多普勒;FPGA;复自相关
0 引言
我国海洋资源丰富,如何准确探测海洋资源,从而使得海洋资源得到合理的保护、开发和利用显得尤为重要。因此如何更快、更有效、更准确地探测海洋流速,从而更有效地获取海流资料并有效用于舰艇船舶的航行之中,变得尤为重要[1]。
海流计经历了从全机械式的印刷式海流计,到半机械式的转子式海流计,再到基于法拉第效应的电磁式海流计,再到现在使用的多普勒流速仪,由于其利用声波在水中传播的性能十分稳定,多普勒流速仪是现今海工实验室中最常用的流速测量仪器之一,其测量方法和技术一直是研究的重点[2]。多普勒流速仪是利用水中悬浮颗粒物对超声波的反射,再结合多普勒原理来测量流速,这种测量方式具有对水流无扰动的特征,便于对不同类型的液体进行流速测量。然而,现今实验室用的多普勒流速测量系统还存在一系列问题,如驱动电路与滤波电路的设计还达不到信号处理的要求,回波信号的提取与分析质量不高,所以流速测量结果误差较大。
本文以FPGA为核心提出了新型的多普勒流速仪的设计方法,其中包括控制电路、信号发射电路、信号接收电路和换能器信号控制电路。FPGA提供的 IP核资源,可以提高运算精度,精简硬件电路,如数字频率合成(DDS)电路。信号发射电路由D/A转换电路和换能器驱动电路组成。信号接收电路由窄带带通滤波电路、放大电路和A/D转换电路组成。流速仪采用一个换能器实现收发一体化。最后采用了仿真实验与实际流场实验对所提方法进行了验证。实验结果均验证了本文方法的有效性。
1 多普勒测流的基本原理
水中存在着大量悬浮物、微小颗粒及气泡都可作为散射体,多普勒流速测量过程中便将它们的速度近似为水流速度。所以流速仪发射的声波被流体中的散射体的反射,返回到流速仪的换能器中,通过测量回波频率,计算发射波和回波频率的差值得出水流速度。声波频率与相对运动速度之间的关系[3]见式(1):
(1)
其中:FD为多普勒频移频率(Hz);FS为发射频率(Hz);V为声源与散射体之间的相对速度(m/s),当声源与散射体相向运动是为正,相反运动为负;C为声速(m/s)。由于测量过程中声波经历了两次反射,所以式(1)可转化为:

(2)
根据式(2),用一个换能器实现收发一体化。换能器探头发出的超声信号,到达采样体位置时发生反射,反射信号首先被探头所接收,接下来进行信号的调解和处理,最后便得到采样体散射颗粒的流速信息。
2 控制电路与发射的信号
2.1 控制电路
选用XC3S400 FPGA芯片作为控制载体(Xilinx公司性价比较高的一款FPGA芯片)。发射信号的频率为2 MHz,控制芯片的单端端口的传输速率可以达到622 Mbits/s,时钟频率为5~300 MHz,可以满足信号的传输要求。控制芯片的晶振采用的是3.3 V电压,40 MHz频率,并将其作为全局时钟,如图1所示。FPGA提供数字时钟管理模块(DCM)的IP核资源,利用DCM可以实现时钟倍频,将频率倍频到100 MHz,FPGA提供的相位环路锁定可以实现精确的时钟综合,并能够降低抖动实现过滤功能。
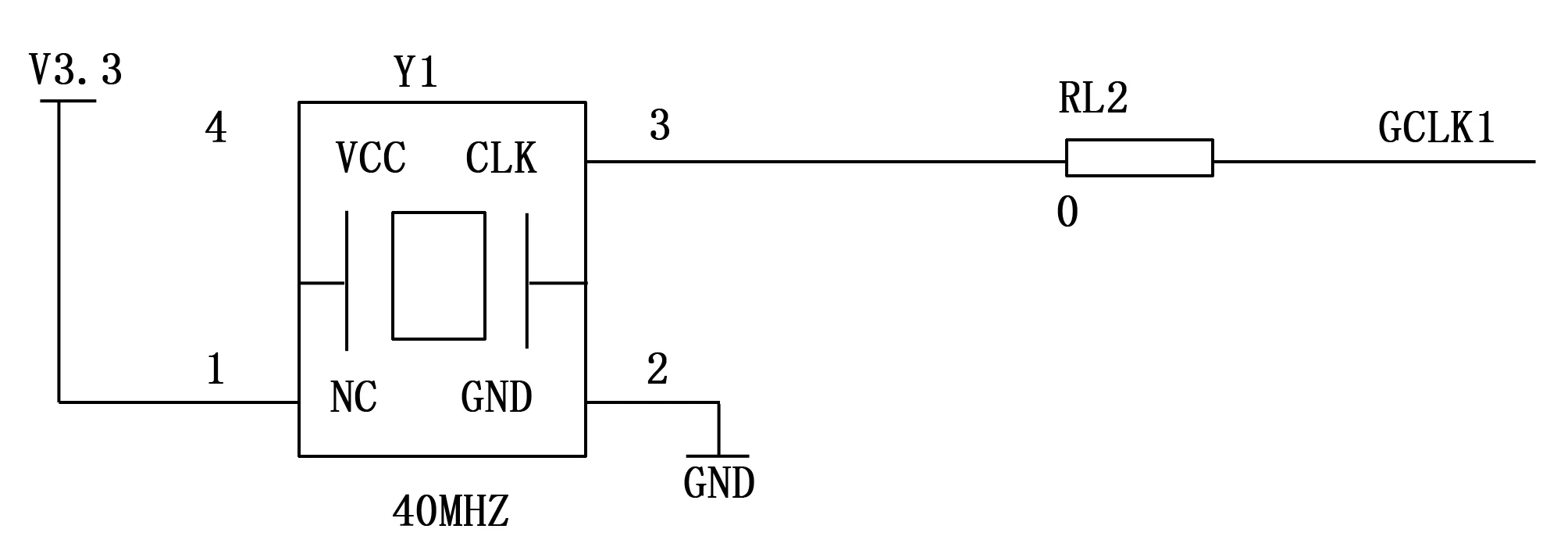
图1 晶振电路
2.2 发射信号的设计
超声波信号在水中由于信号的散射,其能量会出现衰减,回波信号由于非平稳随机过程会造成频率估计误差。所以采用二相调制信号,因为二相调制信号可以在带宽不变的状况下,增加信号发射长度,从而增加信号的发射能量[4]。利用M码对信号进行二相调制是最常用的方法之一,其得到的M序列,具有良好的自相关特性。M序列是由级联的线性移位寄存器完成的伪随机序列。
在以往的研究中,数字频率合成需要使用专用芯片AD9854。控制芯片提供数字频率合成 (DDS)的 IP核资源,可作为信号发生器直接产生正弦波。采用FPGA+DA芯片的模式来产生发射信号,这样做可以更好地自定义发射波形。DDS是在采样定理的基础上建立的,首先对需要产生的波形进行采样,将采样值数字化后存入存储器作为查找表,然后通过查表读取数据,再经D/A转化器转为模拟量,将保存的波形重新合成出来[5]。DDS模块的相位累加器n采用8位宽度,幅值查找表采用8位深度。DA采用Analog公司的高速DAC芯片AD9708,其分辨率为8 Bits,转换速率最高为125 MSPS,性能足以达到我们的要求。DCM模块和DAC芯片均在经过DCM倍频的频率fc下工作。根据设计要求,固定相位累加器的步长M为5。生成的正弦信号频率的计算公式为:
(3)
经过以上计算得f0=1.953 125 MHz。将此信号进行调相,再将此数字信号经过DAC转换为模拟信号,作为发射信号。
DDS基本原理及M调制信号生成图如图2所示。图3为基于5级M码,FPGA的DDS二相调制仿真图。
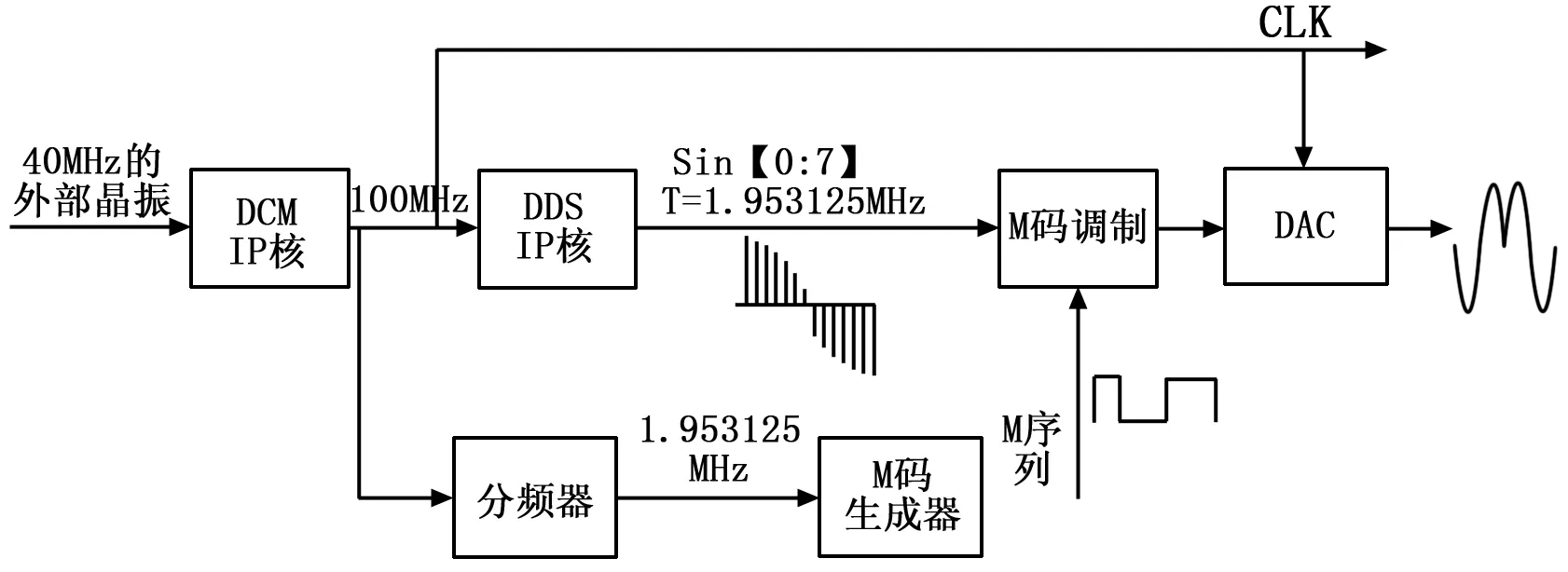
图2 基于FPGA的DDS的M码调相信号生成模块
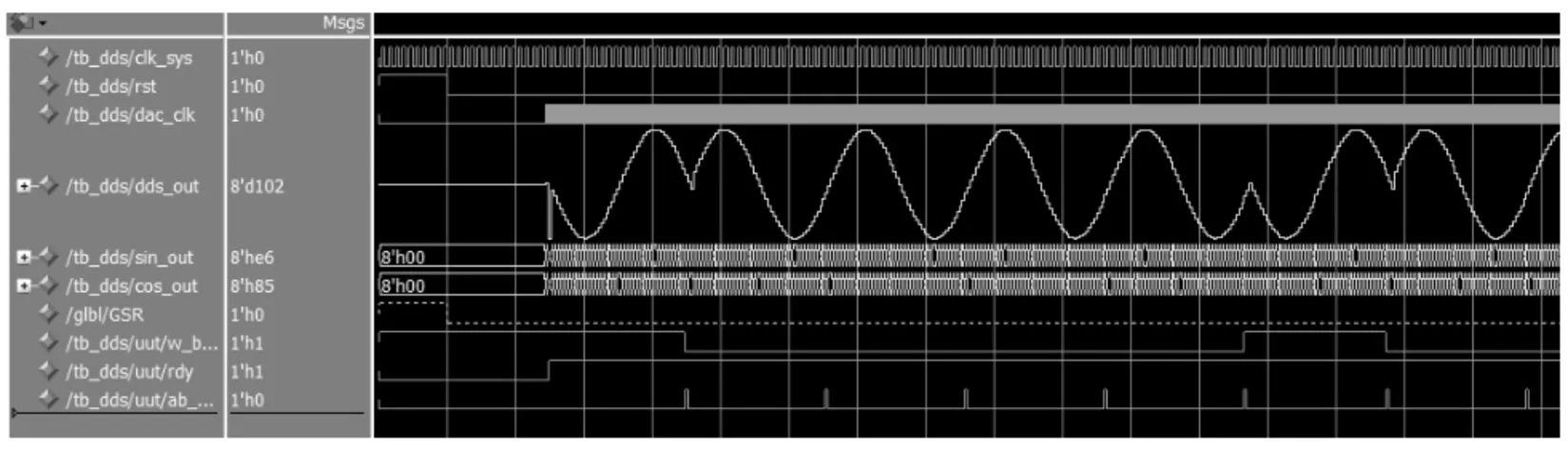
图3 DDS二相调制仿真图
3 硬件电路设计
硬件电路的设计包括两个方面:信号发射电路和信号接收电路。信号发射电路由D/A转换电路和换能器驱动电路组成,实现了数字信号电路到模拟信号电路的转换和滤波放大,从而经过换能器发射。信号接收电路包括高频信号放大电路、窄带带通滤波电路和A/D转换电路,从而实现接收信号的放大滤波和A/D转换,将信号传送到FPGA中做分析处理。
3.1 换能器驱动电路
驱动电路通常是根据换能器的特性所设计,其中包括功放电路、阻抗电路以及滤波电路[6]。功放电路采用的是AD811作为主控芯片,后接高速放大器BUF634起缓冲作为,提高带负载能力,其最大输出电流为250 mA,带宽最高可以达到30 MHz,且芯片内带有电流限制具有过流保护和热关断的功能,较适于中高频功率放大。
高速运放放大器AD811和缓冲器BUF634组成的运算放大器,其带宽可以维持在一个很宽的增益范围,满足发射信号的带宽要求。本文所运用的放大器的最大放大倍数可达到16倍,完全满足换能器发射电压为24 V的要求。
3.2 窄带带通滤波电路
经反射物反射回的信号十分微弱,只几十mV。其频偏也十分微小,在100 kHz之内。其中还包含大量噪声信号,所以需要对反射回的信号进行高Q值的滤波。
带通滤波分为窄带和宽带两种[7],如果上限截止频率和下限截止频率的比值大于一倍频程,则这个滤波器可被认为是一个宽带滤波器,对于宽带滤波器可分为两个独立滤波来设计,低通滤波器和高通滤波器,并简单地看作是低通和高通的级联。
窄带滤波器不能通过低通滤波器和高通滤波器和合成方法实现。因为随着上限截止频率和下限截止频率的比值下降,在中心频率处的损耗就会增加,如图4所示。同时窄带滤波器的设计更为复杂,对元件Q值得要求也加大[8]。
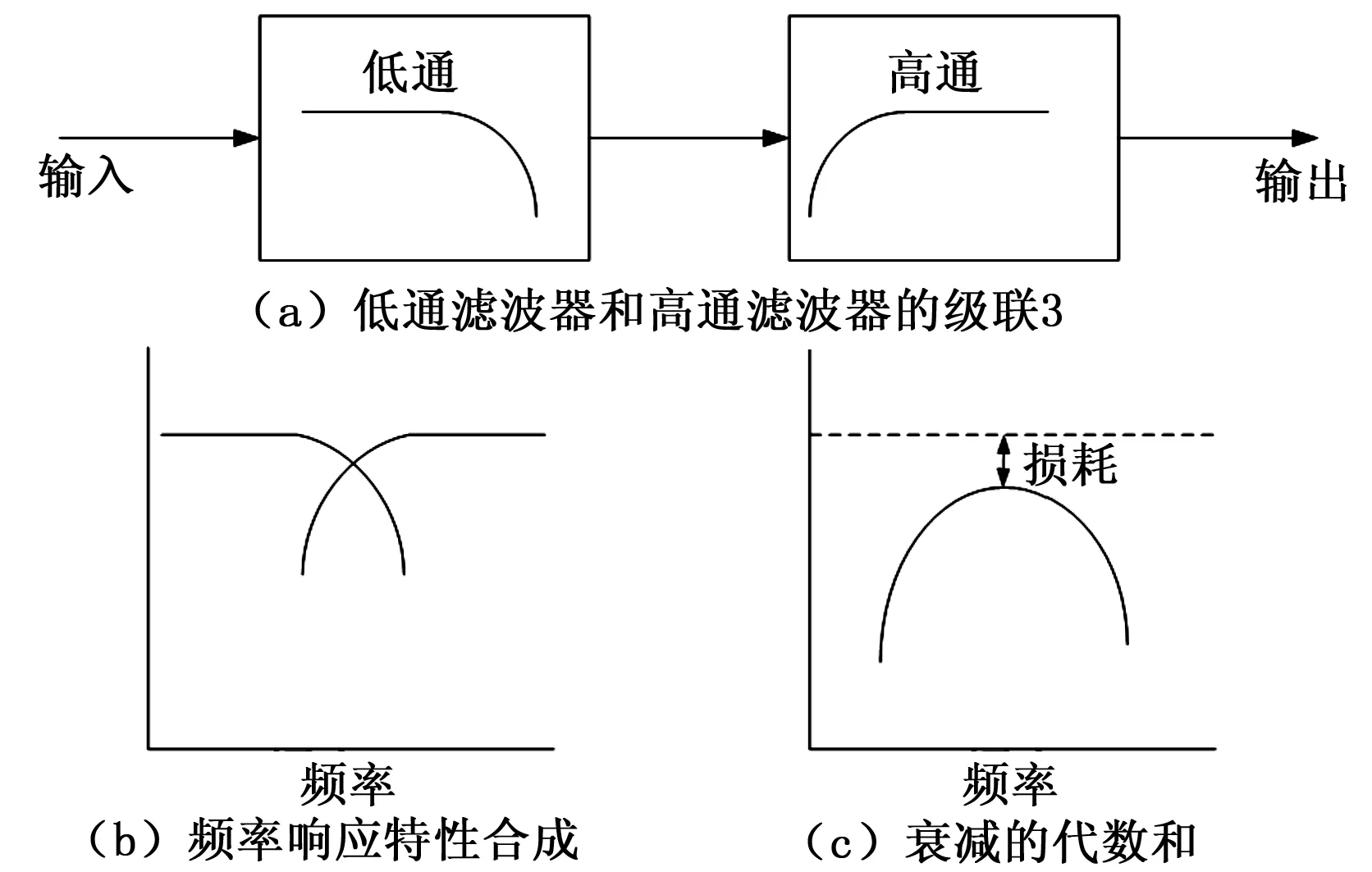
图4 对窄带滤波器实现滤波控制
3.2.1 多反馈带通电路
图5所示电路可以实现一个多路反馈带通结构电路,此电路的特色是采用最少电路元件,并且电路对元件参数误差的灵敏度低。
电路的传递函数:

(4)
中心频率:
(5)
假定电容取100 pF,对信号的滤波要求为中心频率为2 MHz,带宽为200 kHz,增益为5。中心频率也可用式(6)表示:
(6)


(7)

(8)
(9)
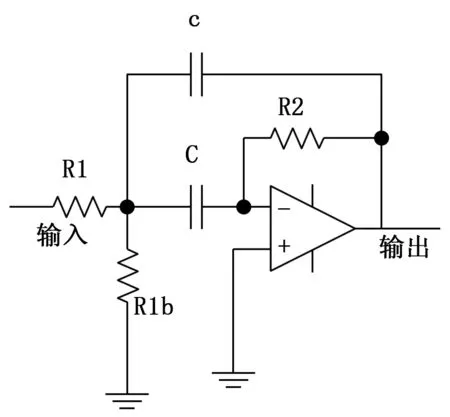
图5 多重反馈带通滤波器
将求出的Q、f0和c值带入(7)、(8)、(9)中求出各个电阻的值。
岩体稀土元素含量∑REE为116.43×10-6,∑Ce/∑Y比值为2.66,δEu为0.61。(La/Sm)N值为3.47,(Gd/Yb)N为0.91;为富轻稀土型。δEu<0.7,表明岩浆为上地壳经不同程度的部分熔融形成的。
3.2.2 滤波器硬件电路
用芯片M33078DE4实现二级反馈有源带通滤波器,图6为滤波器的硬件原理图。M33078DE4是双极性运算放大器,工作电压为±5 V~±18 V,单位增益带宽积为16 MHz。图7为带通滤波电路的增益、相位和频率特性图。
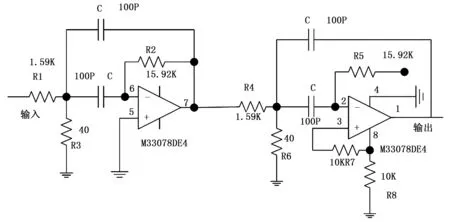
图6 二级反馈有源带通滤波器原理图
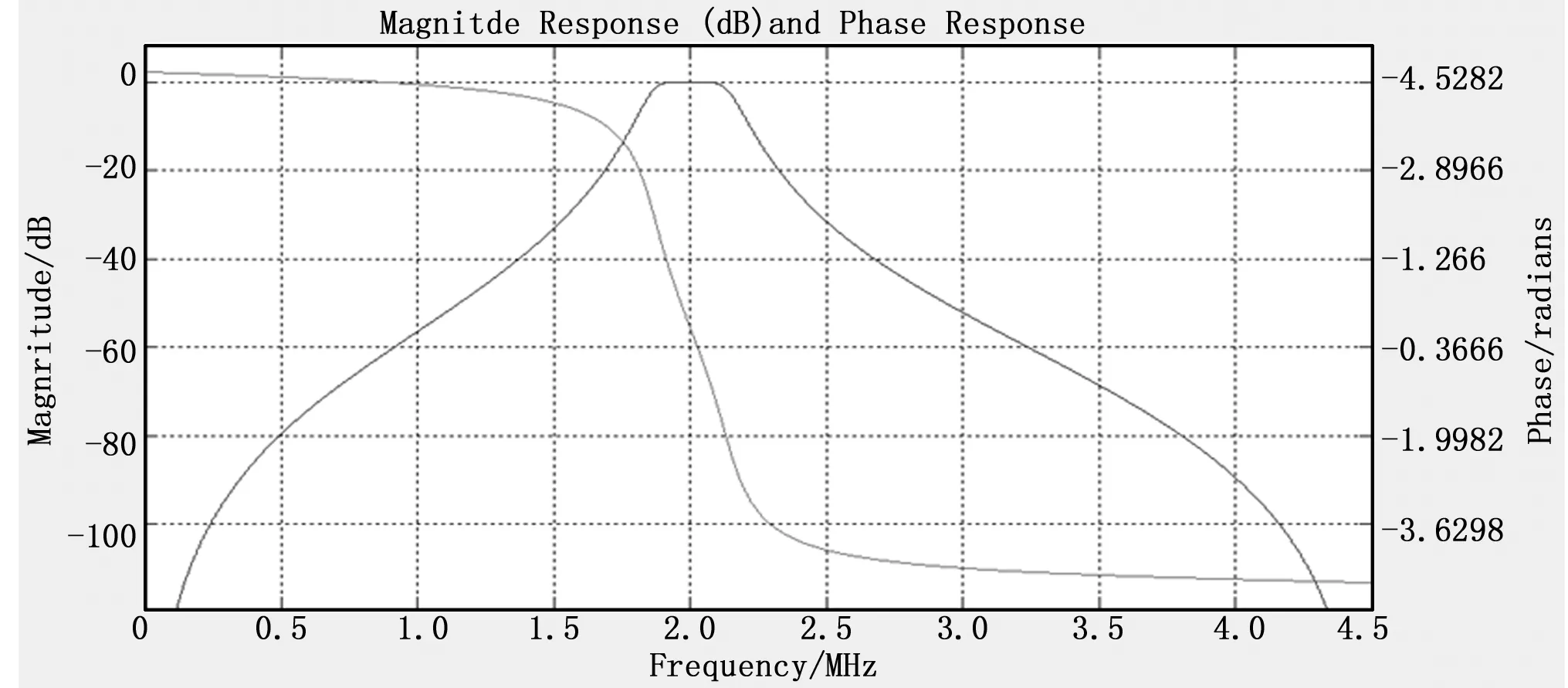
图7 带通滤波电路的增益-相位-频率特性图
4 复自相关脉冲回波处理技术
脉冲对处理技术主要是基于复自相关算法原理[9],进而利用成对的伪随机编码来达到消除混响的目的。设回波信号为:
f(t)=Amcos(wmt+wdt+θ)
(10)
其中:Am是回波幅值,wm是载频信号,wd是频偏信号,θ为初始相位。
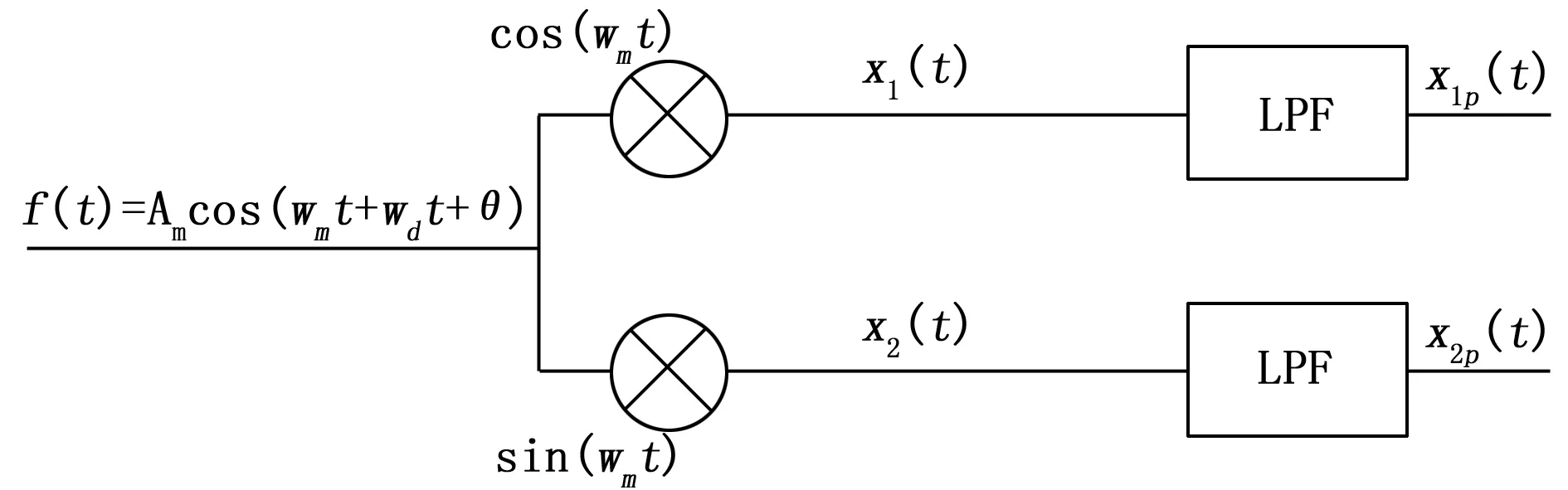
图8 信号的正交调解
先对回波信号做正交解调,如图8,将输入信号与相互正交的两路信号分别做乘法运算,得到混频信号x1(t)和x2(t),再用低通滤波器滤除x1(t)和x2(t)的高频部分,就可得到如下:

(11)
(12)
以x1p(t)为虚部x2p(t)为实部合成复数信号S(t)=x2p(t)+ix1p(t)。进而求得复自相关值S:

(13)
由上式可知,复自相关值S只与回波信号的频率有关,与初始信号的角频率及回波信号的初始相位无关,所以复自相关函数计算多普勒频移是可行的。然后,根据角频率和频率之间的关系,求出多普勒频偏:

(14)得到多普勒频移之后,带入式(2),求出水流速度V,其中水流速度设在常温下为1 450 m/s。超声波在水中的速度C会随着水温变化,所以需要对水温进行测试,从而对最终流速进行修正。
5 信号性能测试与结果分析
在MATLAB仿真情况下,将2 MHz的发射信号加上信噪比为10的白噪声之后,加上不同的频偏之后,分别通过品质因数为10、增益为5和中心频率为2 MHz的低通滤波器和带通滤波器,所得到的信号,通过复自相关运算测出相应频偏。根据表1可以发现窄带带通滤波的滤波误差明显低于低通滤波。图9表示在不加频偏只加噪声的情况下,低通滤波和带通滤波的MATLAB信号仿真图。可以看出带通滤波的效果优于低通滤波。
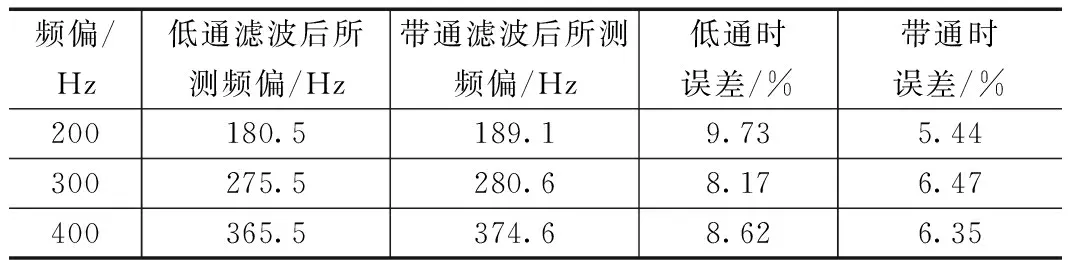
表1 低通带通滤波结果分析表
图10为回波信号经过滤波之后真实的模拟信号图。其滤波效果显著,能很好地滤掉噪声,虽然波峰处仍有毛刺,但误差在可接受范围之内。经过驱动电路的发射信号强度可达24 V,满足换能器对发射信号的要求。将回波信号送入FPGA中计算处理,就可得出水流流速。本文所设计系统,其流速的可测范围为0.2 ~5 m/s。
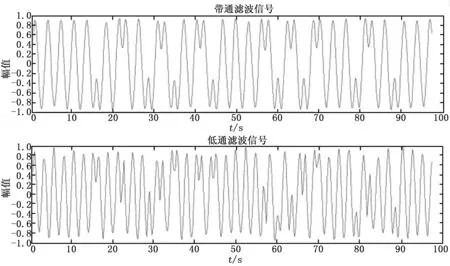
图9 低通滤波和带通滤波信号仿真图
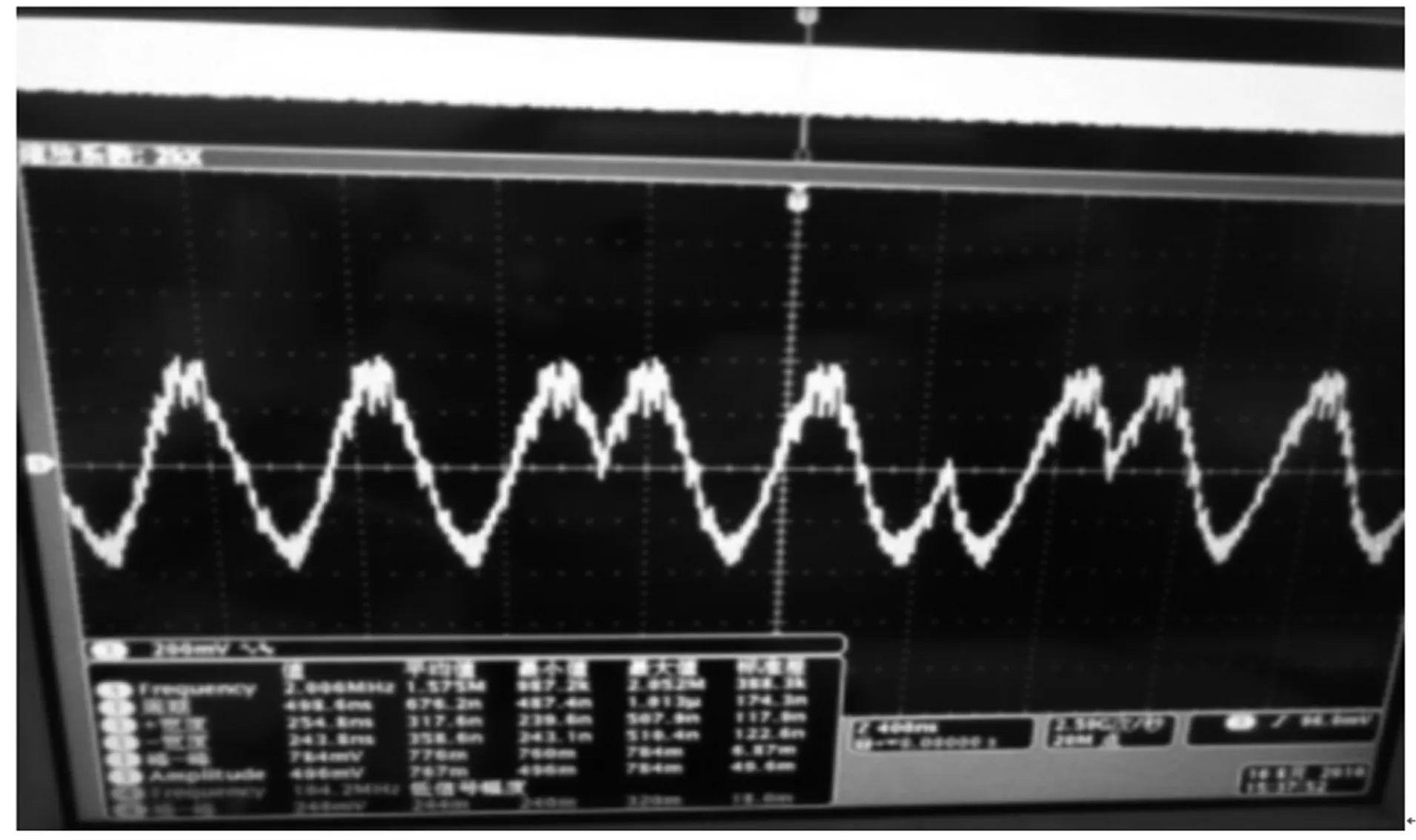
图10 滤波后的回波图
6 总结
本文介绍了多普勒测流的基本原理,并以FPGA为控制芯片搭建硬件电路,控制芯片内有丰富的IP核资源,最大化的精简了硬件电路。对DDS的工作原理进行了阐述,利用FPGA生成M码,用M码对DDS生成的正弦波进行二相调制,增加发射信号的能量,减少回波信号因非平稳随机过程所产生的频率估计误差,提高测量精度。在本文工作中,优化设计了发射电路的换能器驱动电路和接收电路的信号滤波电路。驱动电路满足了换能器的发射需求,滤波电路使用窄带滤波电路可以实现精确滤波,减少回波信号的噪声。利用复自相关算法对接收到的信号进行分析处理,能很好地计算出水流流速。具有测量精度高、误差低等优点。
[1] 田 淳,刘少华.声学多普勒测流原理及其应用[M].郑州.黄河水利出版社,2003.
[2] 邓昌闾. 超声多普勒流速仪的研制 (下)[J]. 水利信息化, 1990(3):22-26.
[3] 范寒柏, 贾少栓, 左保收, 等. 单波束声学多普勒流速仪设计[J]. 仪表技术与传感器, 2016 (9): 37-40.
[4] Haide M. A pulse-to-pulse incoherent flow measurement with frequency-coded signals[J]. 2013, 47(1):986-989.
[5] 陈斌杰. 基于FPGA的扩频信号发生器的研究与设计[D]. 哈尔滨:哈尔滨理工大学, 2009.
[6] 范思航. 超声波换能器驱动及前端接收电路研究[D]. 西安:西安石油大学, 2014.
[7] 闻蔚峰. 基于FPGA的水声通信信标信号生成及数字滤波[D]. 哈尔滨:哈尔滨工程大学, 2005.
[8] Williams A. Analog filter and circuit design handbook[M]. McGraw Hill Professional, 2013.
[9] 朱 昊. 基于软件无线电的数字ADCP信号处理系统的研究[D]. 天津:天津大学, 2005.
A Design Method of Dot-mode Single-beam Doppler Flow System
Cai Mingxia1,2, Du Hai2,3, Li Muguo2,3, Ding Ke1,2
(1.School of Control Science and Engineering, Dalian University of Technology, 116024, China; 2.State Key Laboratory of Coastal and Offshore Engineering, Dalian University of Technology, 116024,China;3.Ocean Engineering Joint Research Center of DUT-UWA, 116024, China)
In order to speed up the Doppler velocity calculation and improve the system stability, the design method is proposed based on FPGA technology, including signal transmission circuit and signal receiving circuit. Firstly, the modulation of the binary phase shift keying signal is carried out by M code, which reduces the echo error and increases the energy of signal transmission, and effectively reduces the influence which the energy dissipation of the ultrasonic in the water to the signal extraction.Then the echo signal is demodulated by two-phase, and analyzed and processed by complex autocorrelation algorithm. Finally, the proposed method is verified by the velocity measurement experiment. The experimental results show thatthe proposed method not only has low experimental error but also has high reliability.
flow velocity measurement; Doppler; FPGA; complex autocorrelation algorithm
2017-01-05;
2017-02-11。
国家自然科学基金项目(61202253);海岸和近海工程国家重点实验室青年学者创新基金(LY1613)。
蔡铭霞(1992-),女,江西上饶人,硕士,主要从事近海传感器方向的研究。李木国(1953-),男,辽宁庄河人,博士研究生导师,教授,主要从事海洋工程模拟实验理论、现代控制技术方向的研究。
1671-4598(2017)08-0008-03
10.16526/j.cnki.11-4762/tp.2017.08.003
TP273
A
