机器人辅助置入与徒手置入椎弓根螺钉的对比研究
2017-11-01陈龙海涌关立刘玉增苏庆军杨晋才康南孟祥龙陈小龙
陈龙 海涌 关立 刘玉增 苏庆军 杨晋才 康南 孟祥龙 陈小龙
机器人辅助置入与徒手置入椎弓根螺钉的对比研究
陈龙 海涌 关立 刘玉增 苏庆军 杨晋才 康南 孟祥龙 陈小龙
目的评价机器人辅助椎弓根螺钉置入的安全性及准确性,并与徒手置钉进行比较研究。方法本研究通过前瞻性对照的方法,将 2015年 12月至 2016年 3月期间 20例需行椎弓根螺钉内固定术的脊柱疾病患者纳入机器人辅助组,其中男 11例,女 9例;年龄 11~85岁,平均 54.1岁。同期选取 20例脊柱疾病患者纳入徒手置钉组,其中男 6例,女 14例;年龄 18~75岁,平均 54.8岁。术前对所有患者进行脊柱 CT 薄层扫描,机器人辅助组利用机器人辅助系统进行术前置钉规划,术中辅助置钉,记录透视次数及置钉时间等,术后复查 CT 根据判断螺钉位置。对数据进行统计学比较分析。结果本研究共置入椎弓根螺钉394枚,机器人辅助组 1例重度僵硬性脊柱侧凸患者因自身原因改用徒手置钉,其他 19例成功应用机器人引导置入 124枚螺钉。机器人辅助组 ( 平台安装+透视匹配 ) 平均透视次数为 ( 7.0±2.5) 次,徒手置钉组平均透视次数为 ( 12.6±4.5) 次,差异有统计学意义 ( P=0.003)。平均机器匹配时间 ( 机器匹配+平台安装 )为 ( 18.9±7.2) min,机器人辅助组平均每枚螺钉置入时间 ( 3.7±1.5) min,徒手置钉组平均每枚螺钉置入时间 ( 4.3±0.8) min,差异无统计学意义 ( P=0.261)。术中透视和术后 CT 显示所有机器人引导置入的螺钉( 100% ) 均准确的置入椎弓根内。根据 Rampersaud 分类法,机器人辅助组 124枚螺钉位置均为 A 类。徒手置钉组 Rampersaud 分类为 A 类 198枚,B 类 28枚,C 类 16枚,D 类 4枚。其准确率 ( A 类和 B 类 ) 为 91.8%,差异有统计学意义 ( P=0.032)。机器人组平均总手术时间 ( 268.3±74.0) min,徒手置钉组平均总手术时间( 267.5±65.3) min,差异无统计学意义 ( P=0.980)。机器人组平均手术出血量 ( 285.0±240.2) ml,徒手置钉组平均手术出血量 ( 640.0±389.3) ml,差异具有统计学意义 ( P=0.031)。结论机器人辅助置入椎弓根可提高置钉准确率,减少术中透视次数,降低辐射量,进而提高手术安全性。其在脊柱微创、翻修、脊柱畸形手术中具有良好的应用前景。
脊柱疾病;椎弓根钉;外科手术,计算机辅助;机器人
椎弓根钉内固定术作为脊柱手术中稳定性重建的重要手段,是脊柱手术最常见的操作之一[1]。脊椎周围遍布重要的神经、血管及脏器,内固定物置入不当可能会造成严重的手术并发症,如功能受损甚至永久残疾。目前的椎弓根置钉技术通过术前解剖标志定位,结合术中影像学进行手术,成功率可达 90.3%~94.1%[2-3]。其准确率与术者的技术经验有很大关系。同时,椎弓根解剖形态存在种族差异和遗传变异或病变、解剖结构发生改变、进钉点不明确或术者经验不足时,徒手置钉技术仍有置钉失误的可能[4]。
因此,为了提高手术安全性和降低相关并发症发生率,迫切需要更稳定的方法进行椎弓根螺钉置入。脊柱手术机器人应运而生,其具有精度高、重复性好、耐疲劳等优点,机器臂还可及术者的手腕、手指无法企及的角度,该技术在脊柱外科领域越来越受欢迎[5]。目前有两类机器人应用在脊柱手术,分别为“监控控制”系统和“主从”系统。其中 Mazor Renaissance 和 Medtech ROSA Spine 作为“监控控制”系统的代表[6],而目前应用最广泛的“主从”系统代表:达芬奇 ( DaVinci ) 手术机器人,已被证实适用于前路椎间盘切除术[7]。传统脊柱外科手术技术,如钉棒系统置入、截骨术或神经解压存在耗时、易致术者疲劳等问题,而现代脊柱外科手术技术更多借助特定解剖结构实施微创,通常经皮或有限通道,简化手术步骤、精确手术过程。随着影像导航技术的飞速发展,脊柱手术机器人辅助系统的开发和应用迎来机遇,尤其是在脊柱内固定的精确定位方面[8]。
本实验使用由以色列开发的 Mazor Renaissance脊柱手术机器人系统,其构造由 2个端板和 6个活塞 ( 可在 6个自由度操纵端板 ) 组成的圆筒形装置( 图 1),以及一个运行接口软件的工作站 ( 图 2),便于术前计划、术中图像采集与记录、运动学计算及机器人引导装置的实时运动控制。该机器人 2014年获得美国 FDA 批准,2015年中旬进入中国,目前我国机器人技术辅助脊柱手术应用仍不广泛,缺乏该技术应用于国人的安全性及准确性相关研究。对2015年 12月至 2016年 3月期间,于我院骨科行椎弓根螺钉内固定术的 40例脊柱疾病患者分别行机器人辅助椎弓根螺钉置入与徒手置钉,并进行比较,报告如下。
资料与方法
一、纳入与排除标准

图1 微型机器人Fig.1 Mazor Renaissance system

图2 机器人工作站Fig.2 Robotic work station
1. 纳入标准:( 1) 脊柱畸形、退变或病变疾患患者;( 2) 需接受双侧椎弓根螺钉内固定术;( 3) 椎弓根完整无变异。
2. 排除标准:( 1) 椎弓根存在变异;( 2) 严重骨质疏松;( 3) 不需要椎弓根内固定,合并严重的其它系统疾病,无法耐受手术的患者。
二、一般资料
本研究共纳入 40例,其中机器人辅助手术组 20例,男 11例,女 9例;年龄 11~85岁,平均 54.1岁;其中 1例脊柱后凸畸形,1例胸椎占位,1例重度僵硬性脊柱侧凸,1例先天性脊柱侧凸( 半椎体切除 ),16例腰椎退行性病变。徒手置入组20例,男 4例,女 16例,年龄 18~75岁,平均54.8岁;2例重度僵硬性脊柱侧凸,1例先天性脊柱侧凸,1例成人特发性脊柱侧凸,16例腰椎退行性病变。术前对所有患者进行脊柱 CT 1.0mm 薄层扫描,机器人辅助组利用 Renaissance 系统进行术前置钉规划,术中再次进行透视与平台进行信息匹配,并记录机器人透视次数及置钉时间等,术后采用脊柱 CT 检查螺钉位置。
三、机器人辅助手术步骤
1. 术前计划:将 1mm 层厚的 CT 扫描原始Dicom 格式数据 ( 图 3) 载入安装有 Mazor Renaissance公司机器人配套软件的电脑,外科医生在电脑上重建脊柱三维模型,在模型上进行椎弓根钉置入,机器人将生成脊柱整体和各节段椎弓根钉置入的相关信息 ( 置入螺钉直径、长度和角度 ),然后医生将术前计划传输至工作站,以促进该计划执行。
2. 平台固定:为脊柱安装连接机器人装置的固定平台 ( 图 4),该机器包括四种固定平台:( 1) 棘突夹平台;( 2) 创伤 T 字平台;( 3) 床边固定平台;( 4) 多向性床边平台。
3. 三维同步:利用术中透视和参考帧获得两个不同位置 ( 正位和斜位均与安装的平板垂直 ) X 线片与图像自动匹配,此步骤用于确定每个脊柱节段在三维空间中相对于安装平台的位置 ( 图 5)。
4. 导航操作:首先机器人工作站根据导入的术前计划将机器人精确地分配到预定轨道位置,随后指导钻孔,然后置入合适的椎弓根螺钉、侧块螺钉或经椎板螺钉 ( 图 6)。
四、结局评价指标及方法。
记录平均置钉时间、术中平均透视次数、手术时间及术中出血量,计算置钉准确率。结局评价方法:患者术后拔除引流管后完成手术部位椎体 CT 扫描。根据 Rampersaud 分类法[9]将椎弓根螺钉是否穿破内壁情况进行评估 ( A:完全在椎弓根内;B:穿破内壁<2mm;C:穿破内壁 2~4mm;D:穿破内壁>4mm )。其中 A 类和 B 类视为椎弓根螺钉位置准确。
五、统计学处理
使用 SPSS 16.0软件进行统计学分析,计量资料用±s 表示,两组之间比较采用独立样本 t 检验,两组之间率比较采用 χ2检验,P<0.05为差异有统计学意义。
结 果

图3 术前计划图4术中平台固定图5机器人系统自动三维匹配图6机器人引导下钻孔及置钉Fig.3 Screws are planned in the software before the operationFig.4 Mounting the platform in the operationFig.5 Auto-registrationFig.6 Robotic-assisted drilling of a channel which was used for the placement of a pedicle screw over a guide wire
本研究纳入 40例。其中机器人组 20例,传统组 20例,共置入螺钉 394枚。机器人辅助组中1例重度僵硬性脊柱侧凸患者因自身原因改用徒手置钉,其他 19例手术过程顺利。所有患者术后症状明显改善,术后 ( 3.0±0.9) 天拔除引流管并完善手术部位椎体 CT 扫描。机器人辅助组平均透视次数少于徒手置钉组,差异有统计学意义 ( P<0.05);机器人辅助组平均每枚螺钉置入时间与徒手置钉组差异无统计学意义 ( P>0.05) ( 表 1)。
机器人引导置入的 124枚螺钉 ( 100% ) 均准确地置入椎弓根内,根据 Rampersaud 分类法,124枚均为A 类。传统手术组 Rampersaud 分类为 A 类 198枚,B 类 28枚,C 类 16枚,D 类 4枚。其准确率 ( A 类和B 类 ) 为 91.8%。两者差异有统计学意义 ( P<0.05)。
机器人组平均总手术时间与徒手置钉组差异无统计学意义 ( P>0.05)。机器人组平均手术出血量小于徒手置钉组,差异有统计学意义 ( P<0.05)( 表 1)。典型病例影像学资料见图 7。

表1 两组患者一般资料及手术情况比较Tab.1 General data & comparison between robot-assisted group and free-hand group
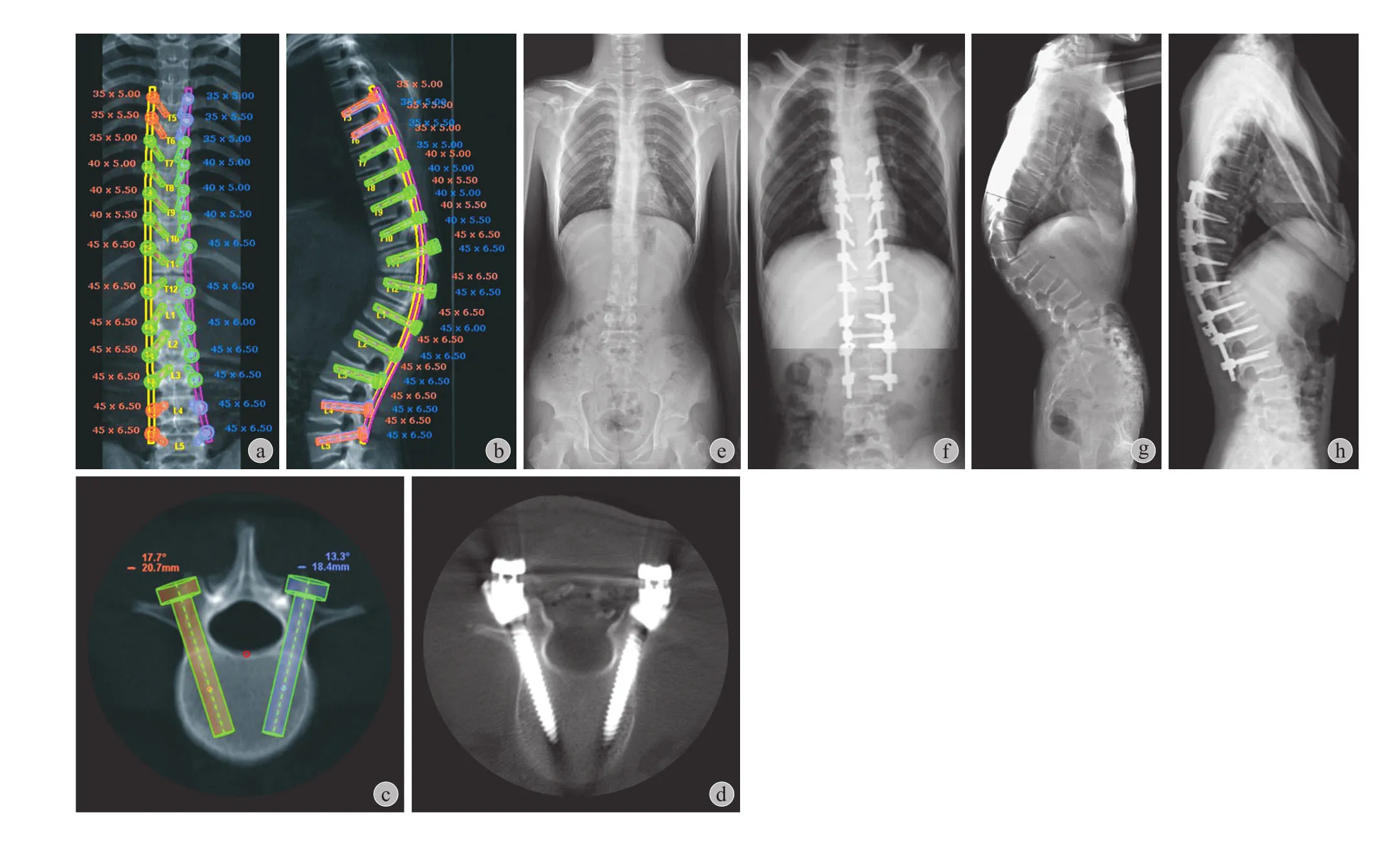
图7 患者,男,14岁,发现脊柱后凸 5年,术前最大后凸角64° a~b:术前机器人规划椎弓根置钉和多节段 Ponte 截骨;c:术前水平面规划椎弓根螺钉进钉角度、深度及螺钉宽度选择;d:术后复查 CT 示与术前规划一致,椎弓根螺钉位置准确;e~h:术后脊柱全长正侧位 X 线片示畸形矫正Fig.7 A 14-years-old male, kyphosis for 5years, preoperative cobb angle was 64° a - b: Planning for pedicle screw placement,multi-segment vertebral Ponte osteotomy via Robotic-assisted system before the procedure; c: Preoperative horizontal planning to determine the angle and depth of the placement, even the width of screws; d: Outcomes of postoperative CT scan were consistent with preoperative planning; e - h: Spinal deformity was corrected
讨 论
一、准确性和安全性
经椎体椎弓根置钉技术作为脊柱内固定的基础自 1969年被介绍以来,被广大的脊柱外科和神经外科医生所重视,其凭借着能承受多方位负荷、保持良好的刚性、促进脊柱融合等众多优势从传统的内固定技术中脱颖而出,并广泛应用于多种脊柱疾病中,如退行性、创伤性及进展性脊柱疾病[3]。椎弓根钉置入的准确性和安全性很大程度取决于患者的解剖标志、导航系统及医生的经验。当患者的解剖结构发生改变、导航不精确或医生经验不够时,会导致螺钉位置的偏差,很可能就会引起相关血管及神经系统损伤,严重时出现瘫痪甚至危及生命。正如很多学者的研究所述,即使是经验丰富的医生,利用传统的徒手置钉技术发生置入物错位的几率仍然很高,报道为 5.1%~31.0%,虽然最终导致严重临床后果的比例很低,但是一旦出现相关并发症就有可能十分严重[1-3]。
Devito 等[10]就机器人辅助椎弓根螺钉置入的准确性进行了一项回顾性、多中心研究,报道了682例共置入 3912枚螺钉 / 导针,3271枚螺钉 / 导针 ( 83.6% ) 是在机器人引导下置入,其它螺钉 / 导针由于各种原因 ( 如定位问题、超过机器人可达到的限制范围、设备故障和机械性运动 ) 而改为徒手置入,机器人引导置入的 3271枚螺钉 / 导针术中透视显示 3204枚螺钉 / 导针 ( 98.0% ) 达到临床可接受范围。术后 139例 ( 约 646枚螺钉 / 导针 ) 接受了 CT扫描,发现 98.3% 的螺钉在安全范围内 ( 89.3% 完全位于椎弓根内,9.0% 穿破椎弓根壁 2mm 以内 ),4例出现神经功能受损,经翻修手术后均未出现永久性神经损伤。
Kantelhardt 等[11]将 112例分为机器人辅助置入组 ( 55例 ) 和传统徒手置入组 ( 57例 ),报道显示机器人组螺钉偏差较传统徒手显著性降低 ( 机器人组准确率 94.5%,传统徒手置入组准确率 91.4% ),机器人手术术中不良事件发生率为 4.7%,而传统手术组发生率为 9.1%。机器人组术后均未出现脑脊液漏,但传统手术患者发生率为 6.1%。机器人手术组术后感染发生率为 2.7%,而传统组发生率为10.7%。
Kim 等[12]最新的前瞻性研究随机分别选取20例作为机器人辅助置入组,另外 20例作为对照组。根据 Rampersaud 分类法分类,机器人辅助组:A 类 95%,B 类 5%;对照组:A 类 91%,B 类8%,C 类 1%。两组数据在统计学上差异无统计学意义。
Hu 等[13]对 102例采用机器人辅助螺钉置入的准确性进行评估,其中 95例成功的应用机器人引导置入螺钉 960枚,准确置入的螺钉 949枚 ( 占计划置入 1085枚螺钉的 87.5%,占成功置入的 98.9% ),11枚 ( 1.1% ) 错位,尽管多数患者脊柱畸形明显且 /或曾经做过脊柱手术。对于位置不佳的螺钉进行分析,发现“工具切出”是主要原因。7例终止机器人手术,其中 4例由于影像学因素所致,提示术中前后位及斜位透视对于定位至关重要。
二、手术时间
多种因素导致采用机器人系统置入螺钉所花时间存在差异,如医生的经验、医生对系统的熟悉程度和定位过程的准确度。Hu 等[13]利用尸体进行了一组对照性研究,发现与传统的手术方式相比,机器人手术花费时间更短,且经验丰富的医生平均每置入 1枚螺钉和建立机器人系统所花费的时间更短。但 Kantelhardt 等[11]对 112例进行回顾性对照研究,发现机器人组和传统组之间,每枚螺钉置入的平均时间差异无统计学意义。据报道单节段或多节段定位也会影响置入椎弓根螺钉所花时间。Takahashi 等[14]研究表明,利用机器人引导系统进行多节段定位与单节段定位可显著缩短椎弓根钉置入时间和总的手术时间。为了充分评估这一问题,还需要对机器人手术进行进一步的评估。
三、放射线暴露
脊柱手术前需要彻底了解每例独立患者的脊柱解剖结构、三维空间中椎体方向及其与潜在神经结构的关系,术者结合术中透视或图像引导获得螺钉 /导针置入的最佳位置。大量研究已证明传统的术中透视辅助椎弓根螺钉置入对医生和手术室工作人员的放射线辐射较大。Roser 等[15]证实,与传统术中透视辅助椎弓根钉置入手术相比,采用机器人系统引导置入的放射线辐射降低了约一半。但是,由于机器人辅助系统需要薄层或高分辨率 CT 扫描,当比较术前 CT 扫描与术中透视辐射剂量时,患者总辐射量增加、减少还是不变尚未定论。
四、脊柱畸形与翻修手术
对于严重脊柱畸形 ( 如脊柱侧凸 ) 患者及因解剖标志改变而需进行翻修手术的患者,椎弓根螺钉置入十分具有挑战性。传统的徒手椎弓根螺钉置入在脊柱畸形中,导致螺钉错位的发生率为 4.2%~15.7%。机器人的设计理论上能提高脊柱畸形的置钉准确率。Devito 等[10]报道了 80例青少年脊柱侧凸患者利用机器人辅助置入椎弓根螺钉的治疗经验,其中男 14例,女 66例,平均年龄 14.4岁,所有患者均行开放式后路脊柱融合术,脊柱侧凸角度平均 66.5° ( 46°~95° ),通过机器人辅助系统共置入1163枚螺钉,其中 95% 的螺钉完全在椎弓根内 ( 如果包括其它可行位置,可达 99% )。目前尚未发现置入物相关并发症,螺钉不需要翻修。
Hu 等[13]的一项前瞻性研究分析了 100余例脊柱畸形与翻修手术患者,共采用机器人辅助系统置入 1085枚螺钉。将这些患者分成 4组:无脊柱畸形或未接受过脊柱手术的患者为第 1组;患有脊柱畸形但未接受过脊柱手术的患者为第 2组;接受过脊柱手术但未患有脊柱畸形的患者为第 3组;患有脊柱畸形并接受脊柱手术的患者为第 4组。整体看来,成功置入 949枚螺钉,11枚螺钉位置不佳,改为手动重新定位置入。由于系统相关的技术问题( 如无法获得足够的术中 X 线及软件或硬件故障 ),110枚螺钉改为徒手置入,15枚螺钉经医生慎重考虑后放弃置入。当分析螺钉置入错位率时发现,4组间差异无统计学意义 ( 第 1组 3.92%,第 2组0.71%,第 3组 2.94%,第 4组 0.74% )。该研究总螺钉错位率为 1.01%,相比历史数据有所改善。
对于一些畸形患者由于脊柱重度旋转致使机器人操作平台难以放置等问题存在,导致机器人无法方便地应用于某些特殊脊柱侧凸群体 ( 如重度僵硬性脊柱侧凸、先天性脊柱侧凸 ),相关应用还有待技术的进一步完善。
五、微创手术技术
在微创脊柱手术 ( 如经皮螺钉置入 ) 中,机器人辅助系统已显示出一定的优势。Pechlivanis 等[16]报道了一个 31例组成的病例系列,所有患者均采用经皮椎弓根螺钉置入加后路腰椎椎体间融合,结果显示机器人辅助系统在 29例中融合成功,经皮共置入133枚螺钉 ( L2~S1),所有患者术后 CT 扫描验证,轴向平面 91.5% 的螺钉及纵向平面 98.4% 的螺钉置入与术前计划相比误差在 2mm 以内。同时发现机器人系统对操作者的依赖程度较低,因为这些螺钉由4位不同医生置入,研究中未发生螺钉失败相关并发症。在一项尸体研究中,作者对机器人辅助系统在经皮椎弓根螺钉置入手术中的效率进行了研究,将 234枚椎弓根螺钉置入 12具尸体 ( 试验组:15位医生,197枚螺钉,10个标本;对照组:2位医生,37枚螺钉,2个标本 )。结果显示:试验组比对照组置入螺钉更准确 [ 平均误差分别为 ( 1.1±0.4) mm和 ( 2.6±0.7) mm;P<0.0001],试验组椎弓根螺钉超出椎弓根壁超出 4mm 的较少 ( 平均为 1.5% 和5.4% ),并且该组医生能够更快地完成手术[17]。
在一项回顾性多中心研究中,Devito 等[10]报道635例机器人手术,其中 49% 采用经皮椎弓根螺钉置入,均获得准确的置入位置,强调了机器人辅助系统在手术过程中不需要直接观察解剖标志这一优势,并且还讨论机器人平台使得医生能够在皮肤层面准确定位,从而可减少皮肤切口。
六、临床预后和成本效益
迄今为止,只有一项研究比较了电脑导航机器人辅助下椎弓根螺钉置入与传统开放手术的功能预后情况,报道称,采用机器人手术的患者需要较少阿片类药物、住院治疗时间缩短且围术期不良反应的发生率降低。这些优势可能是由于机器人手术组比开放组患者采用经皮微创螺钉置入的比例较高所致[12]。机器人辅助下可将常规椎弓根螺钉置入改用经皮微创的方式,减少其手术风险。
目前尚无研究比较机器人辅助脊柱内固定手术与非机器人辅助脊柱内固定手术的长期功能预后情况。与传统脊柱手术技术相比,如果计算机导航脊柱机器人手术的临床预后更好且成本效益高,那么则需精心设计随机对照试验去加以证实。
同所有新技术一样,机器人辅助技术的应用毫无疑问会增加成本。但是一旦这些技术通过验证,相关领域将会制定新的医药经济制度,其成本将趋于稳定。考虑到椎弓根螺钉置入错位翻修手术的成本过高,对于富有挑战性的脊柱手术病例 ( 如畸形患者 ),利用机器人或者导航符合成本效益。
综上所述,Renaissance 机器人辅助手术系统可于术前进行准确的置钉角度、深度、方向等规划,提高置钉准确率,减少术中透视次数,降低辐射量,进而提高手术安全性,但仍未确定术前 CT 薄层扫描是否增加其辐射量;与徒手置钉方式相比,手术消耗时间减少或无显著差异,仍需要进一步评估。其在脊柱微创、翻修、脊柱畸形手术中应用前景良好。
[1] Lee GW, Son JH, Ahn MW, et al. The comparison of pedicle screw and cortical screw in posterior lumbar interbody fusion:a prospective randomized noninferiority trial[J]. Spine J, 2015,15(7):1519-1526.
[2] Silbermann J, Riese F, Allam Y, et al. Computer tomography assessment of pedicle screw placement in lumbar and sacral spine: comparison between free-hand and O-arm based navigation techniques[J]. Eur Spine J, 2011, 20(6):875-881.
[3] Kosmopoulos V, Schizas C. Pedicle screw placement accuracy:a meta-analysis[J]. Spine, 2007, 32(3):E111.
[4] Makino T, Kaito T, Fujiwara H, et al. Morphometric analysis using multiplanar reconstructed CT of the lumbar pedicle in patients with degenerative lumbar scoliosis characterized by a Cobb angle of 30° or greater[J]. J Neurosurg Spine, 2012,17(3):256-262.
[5] Lee J, Kim K, Wan KC, et al. Development of a Bilateral Teleoperation System for Human Guided Spine Bone Fusion Surgery: BiTESS II[M]// World Congress on Medical Physics and Biomedical Engineering 2006. Springer Berlin Heidelberg.2007: 3069-3077.
[6] Bawarjan S, Chetan KP. Robotic Spine Surgery. Current Concepts Section Feature, 2016. (JAN-FEB2016). Spineline,2016: 12-14[EB/PL]. [2017-03-22]http://www.spinelinedigital.org/spineline/january_february_2016/?pg=14&pm=1&u 1=friend.
[7] Beutler WJ, Jr PW, Dimarco LA. The da Vinci robotic surgical assisted anterior lumbar interbody fusion: technical development and case report[J]. Spine, 2013, 38(4):356-363.
[8] Chung GB, Lee SG, Kim S, et al. A robot-assisted surgery system for spinal fusion[C]// Ieee/rsj International Conference on Intelligent Robots and Systems. IEEE, 2005:3015-3021.
[9] Rampersaud YR, Pik JH, Salonen D, et al. Clinical accuracy of fluoroscopic computer-assisted pedicle screw fixation: a CT analysis[J]. Spine, 2005, 30(7):183-190.
[10] Devito DP, Kaplan L, Dietl R, et al. Clinical acceptance and accuracy assessment of spinal implants guided with SpineAssist surgical robot: retrospective study[J]. Spine, 2010, 35(24):2109.
[11] Kantelhardt SR, Martinez R, Baerwinkel S, et al. Perioperative course and accuracy of screw positioning in conventional, open robotic-guided and percutaneous robotic-guided, pedicle screw placement[J]. Eur Spine J, 2011, 20(6):860-868.
[12] Kim HJ, Lee SH, Chang BS, et al. Monitoring the quality of robot-assisted pedicle screw fixation in the lumbar spine by using a cumulative summation test[J]. Spine, 2015, 40(2):87-94.
[13] Hu X, Ohnmeiss DD, Lieberman IH. Robotic-assisted pedicle screw placement: lessons learned from the first 102patients[J].Eur Spine J, 2013, 22(3):661-666.
[14] Takahashi J, Hirabayashi H, Hashidate H, et al. Accuracy of multilevel registration in image-guided pedicle screw insertion for adolescent idiopathic scoliosis[J]. Spine, 2010, 35(3):347-352.
[15] Roser F, Tatagiba M, Maier G. Spinal robotics: current applications and future perspectives[J]. Neurosurgery, 2013,72(1):A12-18.
[16] Pechlivanis I, Kiriyanthan G, Engelhardt M, et al. Percutaneous placement of pedicle screws in the lumbar spine using a bone mounted miniature robotic system[J]. Spine, 2009, 34(4):392-398.
[17] Lieberman IH, Hardenbrook MA, Wang JC, et al. Assessment of pedicle screw placement accuracy, procedure time, and radiation exposure using a miniature robotic guidance system[J]. J Spinal Disord Tech, 2012, 25(5):241-248.
作者须知
关于作者姓名、单位在论文中的脚注方法
1. 个人作者署名:在论文首页下方进行脚注。“作者单位:”后面列出邮政编码、城市和作者单位 ( 具体到科室 )。个人作者超过一位时,可请作者自行指定一位通讯作者 ( corresponding author ),亦即对选题、科研设计起主要作用者,参与论文撰写并能解答编辑部、读者疑问,对论文负全部责任者;在按原格式列出各位作者单位后,另起一行在“通讯作者:”字样后列出通讯作者姓名、邮政编码、单位名称、Email 地址。
A comparative study of robot assisted insertion and traditional free-hand pedicle screw technique
CHEN Long,HAI Yong, GUAN Li, LIU Yu-zeng, SU Qing-jun, YANG Jin-cai, KANG Nan, MENG Xiang-long, CHEN Xiao-long.
Department of Orthopedics, Bejing Chaoyang Hospital, Capital Medical University, Beijing, 100020, China
ObjectiveTo evaluate the clinical application of Renaissance robotic-assisted system for spinal pedicle screw insertion, to compare the placement accuracy & safety of robotic-assisted insertion with traditional freehand technique.MethodsThis was a perspective controlled trial. Twenty consecutive patients ( 11males, 9females )with spinal disorders, who underwent pedicle screws insertion between December 2015and March 2016, were enrolled in the robotic-assisted group. The mean age was 54.1years ( range: 11- 85years ). Twenty consecutive patients( 6males, 14females ) were enrolled in the traditional free-hand group. The mean age was 54.8years ( range: 18-75years ). Whole spinal 1.0mm CT scan was used for all patients. Renaissance robotic-assisted system was used in the robotic-assisted group for preoperative planning. Intraoperative fluoroscopy was applied to match the information with the robotic-assisted system during the procedure. Times of intraoperative fluoroscopy and time of each pedicle screw placement were recorded. Postoperative whole spinal CT scan was applied to check the position of pedicle screws. Data were statistically compared.ResultsA total of 394pedicle screws were successfully implanted. Actually 124pedicle screws were implanted with robotic-assist ( robotic-assist was aborted and 24screws were manually placed ).Average times for intraoperative fluoroscopy per procedure were ( 7.0± 2.5) in the robotic-assisted group ( platform mounting and registration ), and average ( 12.6± 4.5) times for intraoperative fluoroscopy per procedure in hand-free group ( P < 0.05). Average ( 18.9± 7.2) min for mounting the platform and registration. Average ( 3.7± 1.5) min to insert each screw in the robotic-assisted group, and average ( 4.3± 0.8) min to insert each screw in the handfree group ( P > 0.05). Intraoperative fluoroscopy and postoperative CT scan showed all screws were placed into the pedicle accurately with robotic-assist. According to Dr. Rampersaud classification, 124screws were graded as A in the robotic-assisted group. Total 198screws were graded as A, 28were graded as B, 16were graded as C, 4were graded as D in traditional hand-free group. The accuracy rate was 91.8% ( including grade A and B ) with statistical significance( P = 0.032). Average operation time of the robotic-assisted group was ( 268.3± 74.0) min, while free-hand group( 267.5± 65.3) min with no statistical significance ( P = 0.980). Average blood loss of robotic-assisted group was( 285.0± 240.2) ml, while ( 640.0± 389.3) ml in the free-hand group with statistical significance ( P = 0.031).ConclusionsRobotic-assisted system improves the accuracy of implant and the safety of spinal surgery. The times and radiation dosage of intraoperative fluoroscopy are reduced. It is of a great prospect to be applied not only in spinal percutaneous surgery, but also revision and deformity.
Spinal diseases; Pedicle screws; Surgery, computer-assisted; Robotics
HAI Yong, Email: spinesurgeon@163.com
因毕业、工作调动或进修结束等情况单位变动时,论文署名单位应为原单位,介绍信也应由原单位加盖公章批准。刊出时可另行注明第一作者现在工作单位及相应的科室、邮编。
2. 集体署名作者:凡集体署名的论文,于文末写出“ ( ××× ××× ×××整理 ) ”的同时,一律在论文首页下方脚注通讯作者有关信息。通讯作者由投稿者自行决定。( 1) 署名单位只有一个时,脚注中只列出通讯作者的姓名、邮政编码、Email 地址。署名单位超过一个时,脚注中还应加列通讯作者的工作单位。( 2) 协作组署名时,需在文末参考文献前列出整理者姓名 ( 方法同前 ) 及协作组成员。在“协作组成员:”字后列出协作组各单位名称,单位名称后括号内列出参加者姓名。同时脚注:“通讯作者:姓名,单位,邮政编码、Email 地址”。
10.3969/j.issn.2095-252X.2017.10.003
R681.5, Q66
100020 北京,首都医科大学附属北京朝阳医院骨科
海涌,Email: spinesurgeon@163.com
2017-03-22)
( 本文编辑:王萌 )
为支持多中心协作研究项目,可以在论文首页下方脚注“各协作单位第一作者均为本文的第一作者”。
