电力推进船的螺旋桨负载特性仿真与模拟试验
2017-10-30贺海涛汤天浩
范 辉,贺海涛,汤天浩
(1.上海电机学院 电气学院,上海 201306; 2.上海海事大学 物流工程学院,上海 201306)
电力推进船的螺旋桨负载特性仿真与模拟试验
范 辉1,贺海涛2,汤天浩2
(1.上海电机学院 电气学院,上海 201306; 2.上海海事大学 物流工程学院,上海 201306)
针对电力推进船舶在风浪中航行的各种工况,考虑船舶运动和风浪作用,建立带有风浪扰动的电推船桨模型。采用永磁同步电动机对螺旋桨负载特性进行仿真模拟,通过矢量控制使永磁同步电机的电磁转矩特性与螺旋桨各种工况的负载转矩特性一致。在MATLAB/Simulink软件平台上进行全数字建模与仿真,并进行半实物的模拟试验,验证系统的可行性。
螺旋桨负载特性;风浪干扰模型;永磁同步电机;半实物模拟
随着船舶电力推进迅速发展和被广泛应用,船舶的操控性得到极大改善。电动机带动螺旋桨四象限运动的负载特性研究至关重要,特别是风、浪、流干扰下的工作特性分析的重要性日益凸显。目前,负载模拟系统可用来模拟船舶在各工况下的航行情况,为船舶设备的设计制造提供参考;同时,其还可作为推进电机各种工况下性能检验的一种手段。文献[1]和文献[2]在螺旋桨特性四象限的拟合与仿真方面提供有详细的数据及阐述,但只考虑船舶在静水中直线航行的情况。文献[3]从整体上对模拟系统进行阐述。已有研究很少考虑风浪对螺旋桨特性的影响,并通过电机模拟实现。
对此,研究和建立风浪干扰力模型与船桨模型相结合的螺旋桨模拟系统,采用永磁同步电动机矢量控制,完成螺旋桨在各种工况下的四象限负载特性的仿真模拟。
1 系统总体框架
螺旋桨模拟仿真系统的结构见图1。由速度传感器检测轴系速度,送到船桨模型中,计算出相应转速和船速下的螺旋桨负载转矩值,作为电机控制系统的转矩给定。永磁同步电动机采用转子磁链定向的矢量控制,其电磁转矩为

(1)
式(1)可换算成永磁同步电机的转矩给定电流iq,经电流调节器及坐标变换转换成uα和uβ,输入SVPWM调制模块,驱动负载变频器控制负载电机,使得转矩的特性与实际螺旋桨转矩的特性相符合,构成螺旋桨负载特性模拟系统。
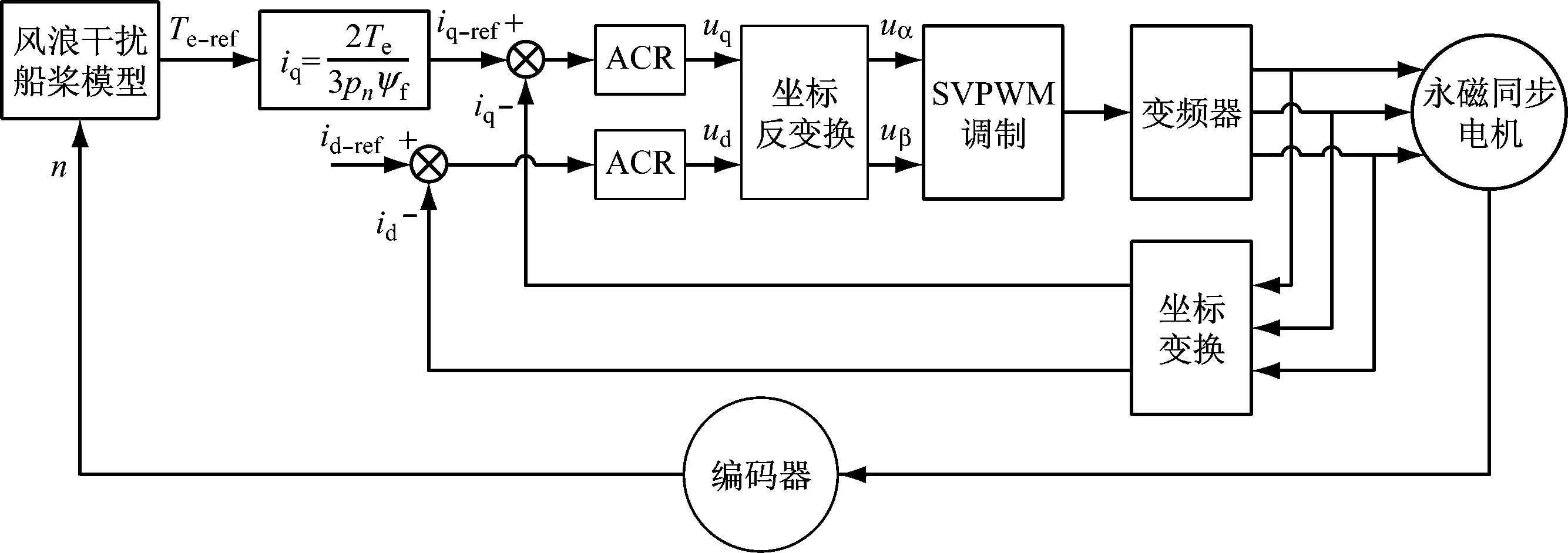
图1 系统结构框图
2 风浪工况下的船桨模型
2.1船桨模型
船桨模型是用数学公式描述船在静水中直线航行、正车、倒车及系缆等工况下的负载转矩T、推力P、螺旋桨转速n和船速vs之间的关系,并考虑船与桨之间的相互影响。螺旋桨负载特性可通过简化的船桨模型得以体现。根据文献[1]和文献[2],得到螺旋桨负载计算框图见图2。为考虑风浪干扰的影响,增加虚线部分作为风和浪的干扰力。

图2 螺旋桨负载计算框图
直线航行时四象限船桨水动力数学模型为
J=vp/(nD)
(2)
KP=f(J)
(3)
KT=f(J)
(4)
P=Kpρn2D4
(5)
T=KTρn2D5
(6)
(7)

(8)
式(2)~式(8)中:P为推力;T为转矩;ρ为海水密度,kg/m3;n为螺旋桨转速,r/s;D为螺旋桨直径;vp为螺旋桨相对于水的速度,m/s;J为四象限进速比;KP和KT分别为螺旋桨推力系数及转矩系数;t为推力减额系数;vs为船速;Cz为船舶总阻力系数;Pe为有效推力,与推力P的关系体现推力减额系数t的作用,Pe=(1-t)P;vp与vs的关系体现伴流系数w的作用,vp=(1-w)vs。
应注意,螺旋桨在船舶航速保持为零时(如船舶停泊时)正向航行或反向航行的机械特性曲线相对原点对称(见图3中的实线)。当航速为某定值、螺旋桨反向减速时,情况相对复杂(见图3中的虚线),整个正反转过程可分为以下3个阶段:
1) 螺旋桨转速n降低,船速vs开始下降,转矩T下降(T>0);
2) 转速n和船速vs仍为正(n>0),但出现负的转矩T(T<0),并会出现最大负转矩,此时船舶继续向前航行,而螺旋桨将在水压的作用下尽力维持原来的旋转方向;
3) 螺旋桨开始反转(n<0,T<0),但船速vs不会立即变负,而是在一段时间之后才变负。

图3 螺旋桨负载特性曲线
2.2风浪干扰模型
在船舶运动控制系统中,通常用惯性坐标系和附体坐标系来描述船舶的状态,其中:惯性坐标系固定在地球表面,作为基准参考系统;附体坐标系随船舶一起运动,原点O取船舶中心或重心,x轴指向船首,y轴指向右舷,z轴指向龙骨。船舶运动有6个自由度,分别为沿x轴的纵荡运动、沿y轴的横荡运动、沿z轴的垂荡运动、绕x轴的横摇运动、绕y轴的纵摇运动和绕z轴的艏摇运动。
若只考虑船舶在平面内的运动,则可只考虑纵荡运动、横荡运动和艏摇运动。将附体坐标系的原点取在船舶重心处,则三自由度运动方程为
(9)


(10)
式(10)中:推力PeX和阻力RX如式(8)所示,其中下标X强调力作用在船舶纵向运动上(如图2中的虚线框所示)。
2.2.1风的干扰力

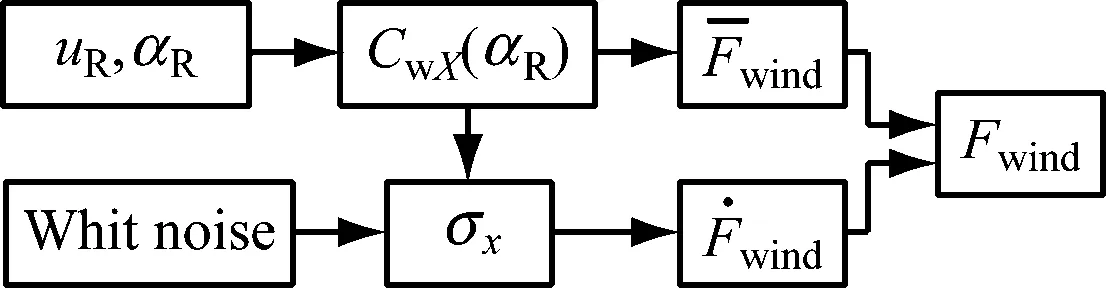
图4 风干扰力计算框图
平均风压力为
(11)
式(11)中:ρa为空气密度;Af为船舶水线以上的正投影面积;As为船舶水线以上的侧投影面积;uR为船与风的相对速度;αR为船与风的相对风向角,规定风从左舷吹来时>0,反之<0,取值范围为[-180°,180°];CwX(αR)为X轴方向的风压力系数,这里采用文献[4]~文献[7]中总结的回归公式。
(15)
式(12)~式(15)中:Loa为船体长度;B为船体宽度;Af和As分别为船舶水线以上的正投影面积及侧投影面积;Hc为侧投影面积中心到水平面的高度;HBR为上层建筑顶部到水平面的高度;AOD为甲板以上部分的侧投影面积;C为侧投影面积中心到船中剖面的水平坐标;β,δ,ε为船舶试验系数(见表1)。
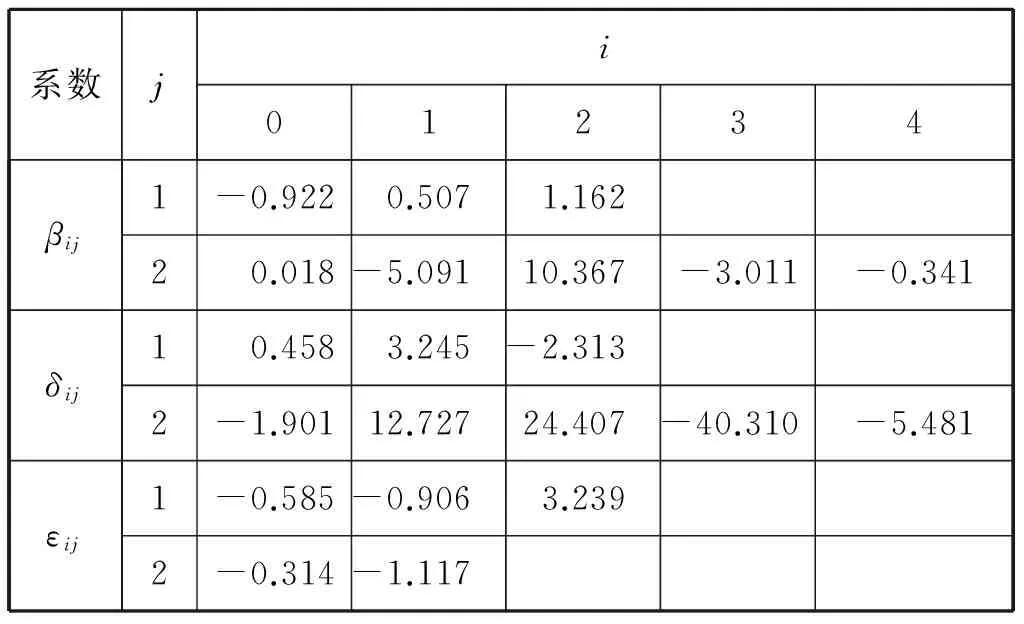
表1 CwX(αR)计算系数表
(16)


a)CwX随αR的变化曲线b)F-windX随αR的变化曲线

随相对风向角αR的变化曲线


a)F~wind随αR的变化曲线b)Fwind随αR的变化曲线

2.2.2波浪的干扰力
波浪的干扰力较为复杂,这里只根据经验公式进行计算仿真。波浪干扰力分为一次干扰力和二次干扰力,其中:一次干扰力为高频、微幅波,作用在船上主要引起纵摇和垂荡运动,这里可忽略;二次干扰力则会改变船舶航行的航向和航迹等,因此主要计算二次干扰力。
图7 波浪干扰力计算框图
规则干扰力为
(17)
式(17)中:ρ为海水密度;Loa为船长;a=h/2为波幅;h为波高;χ为船与浪的遭遇角,逆时针为正,变动范围为[0,2π];λ为波长;CwX(λ)为试验系数。
CwX(λ)=0.05-0.2(λ/Loa)+0.75(λ/Loa)2-0.51(λ/Loa)3
(18)
不规则干扰力为
(19)
Δw=(wmax-wmin)/30
(20)
wi=(i+1)Δw-randn(1)Δw
(21)
(22)
(23)

试验系数CwX(λ)随λ/Loa的变化曲线见图8。
图8 CwX(λ)随λ/Loa的变化曲线


a)F-waveX随χ的变化曲线b)F~waveX随χ的变化曲线c)FwaveX随χ的变化曲线

3 各种工况下螺旋桨特性仿真
PMSM电机模型及其SVPWM调制方法在很多文献[9-11]中都有阐述,这里不再赘述。将船桨模型和PMSM控制系统连接起来进行整体的仿真。船桨模型以实船参数为参照,是一个大的惯性系统,加速和减速都很缓慢,转矩也很大。若要在小系统内做实物仿真,必然需合理地缩小系统。现假设转矩缩小为1/5 000,船体质量缩小为1/10 000,时间轴也相应缩小。Simulink模型见图10。

图10 Simulink模型
3.1直接缓慢启动,达到额定转速(工况1)
该工况下的转速-船速曲线和负载转矩曲线见图11。

a)转速-船速曲线b)负载转矩曲线
图11 工况1下各参数的变化曲线
3.2分级启动(工况2)
该工况下的转速-船速曲线和负载转矩曲线见图12。

a)转速-船速曲线b)负载转矩曲线
图12 工况2下各参数的变化曲线
3.30速倒车,稳定后正车至额定转速(工况3)
该工况下的转速-船速曲线和负载转矩曲线见图13。

a)转速-船速曲线b)负载转矩曲线
图13 工况3下各参数的变化曲线
3.4在风浪工况下从0速启动
在船舶三自由度运动模型中,风速和风向通常是稳定的,船舶进行10°左右的Z字型航行或左右35°的回旋运动,此时考虑风、浪的作用力对船舶运动的影响。
考虑到模型船为直线航行,若考虑风浪的作用力对船的干扰,则可采取变换风向的方式来进行。无论风向和航向如何变化,最终的效果都是相对风向角αR和遭遇角χ发生变化。
现假设海面以上10 m高处的风速为15 m/s,风向角随时间在[-180°,180°]内变化(见图14)。

图14 相对风向角αR随时间变化曲线
3.5船舶从0速开始加速(工况4)
该工况下的转速-船速曲线和负载转矩曲线见图15。

a)转速-船速曲线b)负载转矩曲线
图15 工况4下各参数的变化曲线
3.6在风浪工况下0速倒车,稳定后正车至额定转速(工况5)
该工况下的转速-船速曲线和负载转矩曲线见图16。
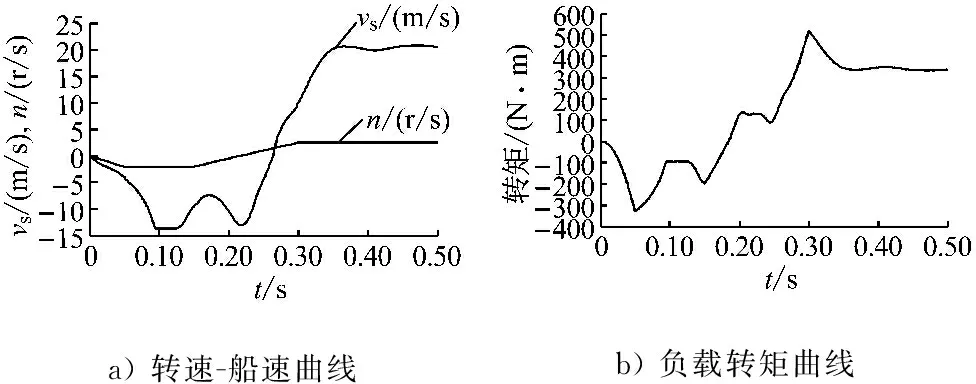
a)转速-船速曲线b)负载转矩曲线
图16 工况5下各参数的变化曲线
由上述分析可知,船速在风的干扰力FwindX和浪的干扰力FwaveX的作用下有一定的起伏;同样,转矩在航行过程中也有一定的起伏。
4 半实物模拟试验
由以上分析可知,实现螺旋桨负载特性模拟的核心是控制永磁同步电机电流的转矩分量iq跟随系统的给定参考量iq-ref变化,并考虑到模拟系统中负载电机在大多数工况下是作为发电机工作的。在该前提下,可在试验设备不足的情况下适当地设计替代方案。改变试验方案后的系统结构见图17,可用调压器从电网中接出三相电压,模拟永磁电机的发电状态,三相桥工作在整流状态下,在模拟试验方案中只要控制有功电流跟随船桨模型计算出的给定参考量变化,即可达到模拟的效果。
1) 主电路:在试验平台中选用Myway公司MWINV-9R144型号整流器,调压器原边、副边星形连接,交流侧电感5,直流侧负载60,电容1500。由于整流器集成有采样电路及保护电路,因此只需将采样信号引入到控制器中,由控制器完成采样信号恢复、锁相、控制算法处理及产生PWM控制信号。
2) 控制器:dSPACE/DS1104 是德国的一家高新科技公司开发的dSAPCE平台,适用于快速控制原型(RCP)和硬件在回路仿真(HILS)。

图17 模拟试验方案硬件部分控制结构图
使用DS1104进行风浪干扰螺旋桨负载特性模拟系统的半实物模拟。螺旋桨负载模拟系统包含RTI接口的Simulink模型。
对工况1进行模拟。模拟试验方案是用调压器从电网中接出三相电压来代替永磁同步电动机,锁相环代替PMSM的编码器。整流系统的有功电流对应永磁同步电机的转矩电流,转矩方程为
(24)
则模拟试验方案的整流系统给定参考量为

(25)
同时控制模拟整流方案的无功电流,则可通过坐标变换计算出电网侧三相电流(iq=0)为

(26)

(27)
(28)
式(26)~式(28)中:pn和ψf均为常数,可看出螺旋桨负载特性的转矩值可由电网侧三相电流的外廓线表示出来。
将工况1的仿真数据导出为Torque.mat文件,并加载到dSPACE中,作为控制系统的给定参考量,得出螺旋桨负载模拟系统的模拟试验结果见图18。

图18 网侧电流外廓线表示负载特性转矩
将试验结果与图10b相对照,证明了螺旋桨负载特性模拟试验的正确性。
5 结束语
根据风、浪各自的特性建立风浪干扰模块,进而建立船舶在风浪工况下的船桨模型,进行螺旋桨特性仿真,给出各工况条件下螺旋桨负载特性曲线,并分析风浪干扰的影响。在此基础上,搭建螺旋桨负载特性模拟系统的半实物平台,采用dSPACE/DS1104控制永磁同步电机模拟实际的螺旋桨负载。同时,针对静水中直接启动工况的螺旋桨负载特性进行半实物模拟试验,证明了系统的可行性。
[1] DIAN-PU L I,WANG Z Y.Chebyshev Fitting Way and Error Analysis for Propeller Atlas Across Four Quadrants [J].Journal of Marine Science & Application,2002,1(1):52-59.
[2] 李殿璞.基于螺旋桨特性四象限Chebyshev拟合式的深潜艇正倒航变速推进模型[J].哈尔滨工程大学学报,2002,23(1):52-57.
[3] GUO Y,ZHENG H Y,WANG B L,et al.Design of Ship Electric Propulsion Hybrid Simulation System[J].Journal of System Simulation,2006,2(1):1059-1063.
[4] FUJIWARA T,UENO M,IKEDA Y.Cruising Performance of Ships with Large Superstructures in Heavy Sea:1^Report :Added Resistance Induced by Wind and Waves,and Optimum Ship Routing[J].Journal of the Japan Society of Naval Architects & Ocean Engineers,2005(2):257-269.
[5] FUJIWARA T,UENO M,IKEDA Y.Cruising Performance of Ships with Large Superstructures in Heavy Sea:2^Report:Added Resistance Induced by Wind and Waves,and Optimum Ship Routing [J].Journal of the Japan Society of Naval Architects & Ocean Engineers,2006(3):147-155.
[6] HUANG H,SHEN A D,CHU J X.Research on Propeller Dynamic Load Simulation System of Electric Propulsion Ship [J].China Ocean Engineering,2013,27(2):255-263.
[7] FUJIWARA T,UENO M,IKEDA Y.Cruising Performance of a Large Passenger Ship in Heavy Sea[C]∥International Society of Offshore and Polar Engineers.The Sixteenth International Offshore and Polar Engineering Conference,San Francisco,California,2006:304-311.
[8] 贾欣乐,杨盐生.船舶运动数学模型-机理建模与辨识建模[M].大连:大连海事大学出版社,1994.
[9] VUKIC Z,BORVIC B.Guidance and Control Systems for Marine Vehicles[M].The Ocean Engineering Handbook,2000:14-32.
[10] FOSSEN T I.Guidance and Control of Ocean Vehicles [M].Weinheim:Wiley,1994:455-47.
[11] 杨贵杰,孙力,崔乃政,等.空间矢量脉宽调制方法的研究[J].中国电机工程学报,2001,21(5):79-83.
SimulationandTestofLoadCharacteristicsofPropellerinElectricPropulsionShips
FANHui1,HEHaitao2,TANGTianhao2
(1.School of Electrical Engineering,Shanghai Dianji University,Shanghai 201306,China;2.Logistics Engineering College,Shanghai Maritime University,Shanghai 201306,China)
According to the operating condition of electric propulsion ships in the wind and waves,taking the motion characteristics of ships acted by the force of wind and waves into account,a model of propeller in electric ships with wind and waves disturbing is built.A Permanent Magnet Synchronous Motor (PMSM) based on vector control method is used to simulate the propeller’s load characteristics under various working conditions.Some simulation and testing using MATLAB/Simulink and a semi-physical simulation are carried out to verify the feasibility of the system.
load characteristics of propeller; model of wind/wave disturbance; PMSM; semi-physical simulation
U664.3
A
2017-02-11
国家自然科学基金(61503242)
范 辉(1973—),男,上海人,高级工程师,硕士,研究方向为电机与设计。E-mail:fanhui@sdju.edu.cn
1000-4653(2017)02-0019-06
