基于AIS信息和BP神经网络的船舶航行行为预测
2017-10-30金永兴胡勤友施朝健王胜正
甄 荣,金永兴,胡勤友,施朝健,王胜正
(上海海事大学 商船学院,上海 201306)
基于AIS信息和BP神经网络的船舶航行行为预测
甄 荣,金永兴,胡勤友,施朝健,王胜正
(上海海事大学 商船学院,上海 201306)
针对船舶航行行为多维度的特点和船舶交通服务系统(Vessel Traffic Service,VTS)对船舶行为预测的精确度和实时性需求,提出结合船舶自动识别系统(Automatic Identification System,AIS)信息和BP(Back Propagation)神经网络的船舶航行行为预测方法。构造基于AIS信息的船舶航行行为特征表达方法,根据BP神经网络预测的基本原理,以连续3个时刻的船舶航行行为特征值为输入,以第4个时刻的船舶航行行为特征值为输出,对BP神经网络进行训练,用于对未来船舶航行行为进行预测。以成山角VTS水域内的船舶AIS信息为例进行试验,结果表明:利用该方法对船舶航行行为特征值进行预测的结果准确、实时,误差在可接受的范围内。
水路运输;船舶行为;预测;AIS信息;BP神经网络
在沿海和港口水域,特别是在交通密度较大、态势复杂的海域,利用船舶交通服务系统(Vessel Traffic Service,VTS)精确、有效地对船舶的航行行为进行实时跟踪预测是海上交通事故预测和预警的重要技术支撑,对提高海上交通监管效率和降低交通风险具有重要意义。当前已有较多针对船舶行为预测的研究:文献[1]运用卡尔曼滤波算法对船舶自动识别系统(Automatic Identification System,AIS)观测数据进行最小二乘法估计,得到平滑的船舶运动轨迹,对船舶行为数据进行预测;文献[2]将改进卡尔曼滤波算法应用到船舶运动轨迹处理中,对船舶运动轨迹进行预测;文献[3]运用竞争神经网络对船舶航行状态进行探测和跟踪,通过扩展卡尔曼滤波对船舶航行状态进行估计;文献[4]运用支持向量机模型对桥区水域内失控船舶的航迹进行预测;文献[5]引入基于时间序列的船舶航行位置预测算法,对船舶航行位置进行预测;文献[6]设计基于三层BP(Back Propagation)神经网络的航迹预测模型,以船舶航向和航速作为输入、以经度差和纬度作为输出来神经训练网络参数,实现船舶位置预测;文献[7]结合马尔科夫链和灰色模型对内河船舶轨迹进行预测。在卡尔曼滤波、支持向量机和灰色模型的船舶轨迹预测方法中,需构建船舶运动学方程,而风、流等环境因素对船舶运动的影响较大,干扰的随机性和多样性直接导致运动的复杂性。从VTS监控系统的角度考虑,船舶行为预测必须具备时效性,而实时准确地建立数学方程不仅较难实现,而且对数据源要求较高,大多数方法只适用于理想状态。基于神经网络的船舶轨迹预测方法具有用时短、误差小和通用性强的特点[6],适合VTS对船舶轨迹预测实时、高效的需求。文献[6]仅通过BP神经网络对船舶的空间航行位置进行预测,而完整的船舶航行行为需包括船舶的速度和航向特征。基于此,在已有研究的基础上,提出结合船舶AIS信息和BP神经网络对沿海VTS监控海域内船舶的航行行为进行预测,将船舶AIS数据作为船舶行为的表征数据,在船舶航行轨迹特征的基础上考虑船舶航行速度和航向等特征,在船舶航迹预测的基础上实现多维的船舶航行行为特征预测。
1 基于AIS信息的船舶航行行为分析
船舶的航行行为主要体现在船舶的航行位置、速度和航向随时间的变化上,对应的船舶AIS信息中的动态信息分别为时间(TIME)、经度(LONGITUDE)、纬度(LATITUDE)、SOG(Speed Over Ground)和COG(Course Over Ground)等。为区分不同船舶的航行行为,将船舶的海上移动业务识别码(Maritime Mobile Service Identity,MMSI)加入到船舶航行行为表征数据中。由此,基于AIS信息的船舶航行行为可表示为
Vessel_Behavior(MMSI,TIME)=
{ LONGITUDE,LATITUDE,SOG,COG }
(1)
在该模型中:MMSI用来区分和表征船舶;TIME标识船舶航行行为的时间特性;LONGITUDE和LATITUDE表征船舶航行行为的空间属性;SOG表征船舶航行行为的速度特性;COG表征船舶航行行为的方向特性。这里采用的船舶AIS原始信息由船队在线[8]提供,经接收和解码后存储在My SQL数据库中,以方便查询和调用。船舶AIS信息存储结构示意见图1。
在数据库中,按照船舶航行行为数据表征的需求设计MMSI,TIME,LONGITUDE,LATITUDE,SOG和COG等字段,并将MMSI和TIME作为主键,以方便查询和处理船舶AIS信息。
2 基于BP神经网络的船舶航行行为预测模型
2.1BP神经网络结构
BP神经网络是一种根据误差反向传播算法训练的多层前馈神经网络,其架构示意见图2。[9]
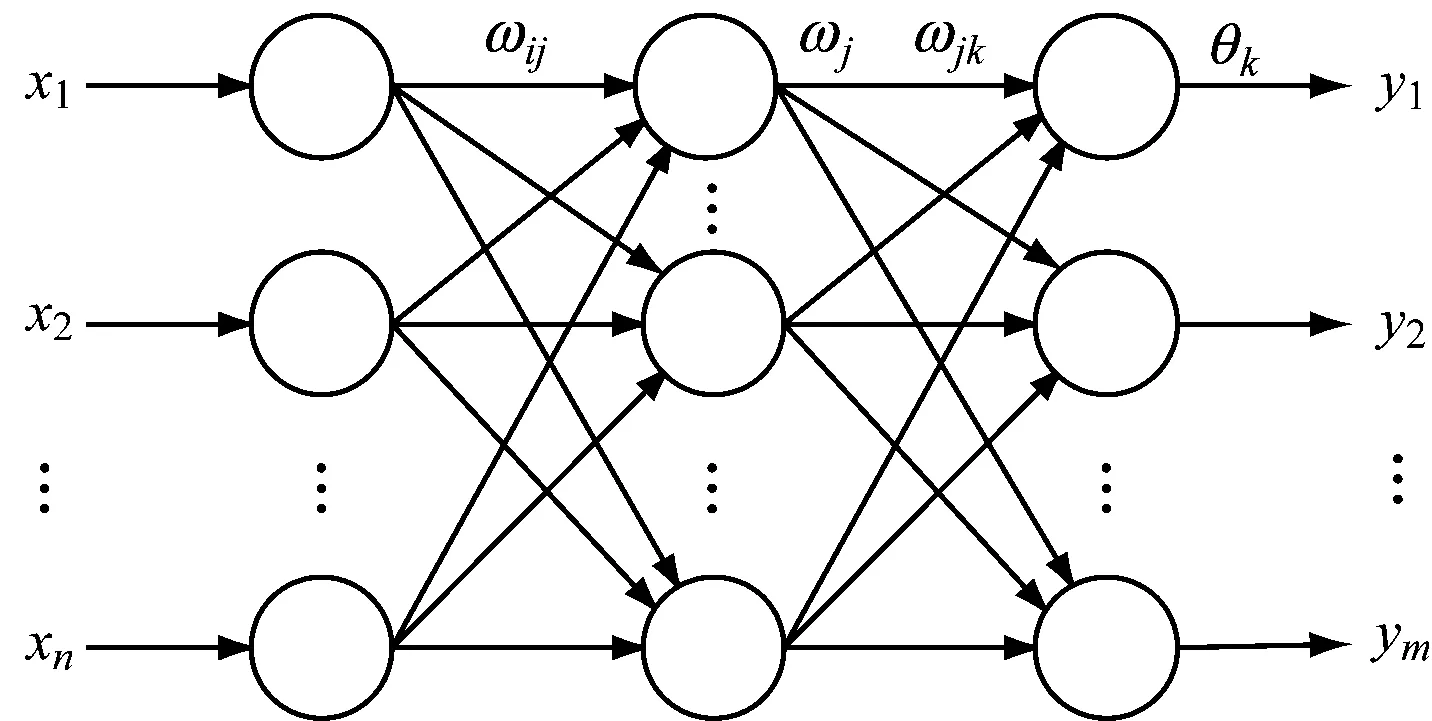
图2 BP神经网络架构示意
图2为标准的BP神经网络结构,包括输入层、隐含层和输出层,其中:输入层包含n个神经元节点(i=1,2,…,n),输入向量为u=(x1,x2,…,xn)T;隐含层包含l个神经元节点(j=1,2,…,l);输出层包含m个神经元节点(k=1,2,…,m)。ωij为输入层神经元与隐含层神经元之间的连接权重;ωjk为隐含层神经元与输出层神经元之间的连接权重;θj为隐含层神经元的阈值;θk为输出层神经元的阈值。
BP神经网络是一种有监督的神经网络,预测时首先要利用梯度下降法逐层训练和更新网络的权值及阈值,通过训练使网络具备联想记忆和预测能力,具体训练过程[9]如下。
1) 参数初始化。根据系统输入输出序列(x,y)确定网络输入层神经元节点数n和输出层节点数m,对ωij及ωjk进行初始化,初始化θj和θk,设置合适的网络学习速率和传递函数。
2) 隐含层输出计算。根据ωij及θj,由式(2)得到网络隐含层输出值H。

(2)
式(2)中:l为隐含层神经元节点数;f()为隐含层传递函数,有多种表达形式,在BP神经网络中通常用S型函数,其表达式为
f(x)=1/(1+e-x)
(3)
3) 输出层输出计算。运用H,ωjk和θk,计算输出值O。
(4)
式(4)中:m为输出层神经元节点数;φ为输出层传递函数,通常取线性函数,其表达式为
φ(x)=x
(5)
4) 误差计算。采用单样本训练的方法计算误差和更新权值[10],每输入一个样本,都要回传误差并进行调整,根据网络预测误差输出O和期望输出y,计算网络预测误差e。
ek=yk-Ok,k=1,2,…,m
(6)
5) 权值更新。根据e,利用梯度下降方法,通过计算误差对相应参数的偏导数,得到权值和阈值的更新值,从而更新ωij和ωjk,使误差递减。
式(7)和式(8)中:η为学习率,通常在0~1内取值;i=1,2,…,n;j=1,2,…,l;k=1,2,…,m。
6) 阈值更新。根据e更新θj和θk。
式(9)和式(10)中:j=1,2,…,l;k=1,2,…,m。
7) 判断更新后的权值和阈值计算误差,若小于设定的网络设定误差,则迭代结束;若没有达到要求,则重复步骤2)~步骤6),直到满足要求。
2.2BP神经网络参数分析
2.2.1输入输出参数分析
为减小输入数据间数量级差别较大引起的网络预测误差,需对输入数据作归一化处理,处理后所有数据都转化为[0,1]内的数据。这里采用离差标准化方法对训练数据进行归一化,转换式为
(11)
式(11)中:x为原始训练数据;maxX为训练数据的最大值;minX为训练数据的最小值;x*为转换后的数据;经过离差标准化处理的数据消除量纲和数据取值范围的影响,保留原来数据中存在的关系。
在运用神经网络对船舶航行行为特征值进行预测之后,还需根据式(11)对预测结果进行反归一化处理,使预测得到的数据符合实际意义。
2.2.2神经网络隐含层神经元个数选择
BP神经网络的输入层和输出层神经元个数由训练数据的特征决定,在具体的训练中,隐含层神经元个数的选择对网络的预测精度有较大影响。若节点数设置太少,则神经网络不能很好地对数据进行学习,训练过程中需增加训练次数,网络精度低;若节点数设置太多,则会导致训练时间增加和网络过拟合,最终影响神经元的性能。
对于隐藏层节点数的确定,通常采用经验公式确定估值,以此作为初始值,通过试验进行试凑,选取训练之后识别误差最小的值作为隐藏层节点数。根据文献[11],采用的经验公式为
(12)
式(12)中:M为隐藏层节点数;m为输入层节点数;n为输出层节点数;a为[0,10]内的常数,在实际中需根据经验公式确定最佳范围,采用试凑法确定最佳隐含层神经元节点数。
2.3船舶航行行为预测模型
当前,VTS中心主要通过接收雷达信息和船舶AIS信息获取表征船舶航行行为的数据,这里选用船舶AIS数据。船舶行为预测是从VTS中心跟踪和监控海上船舶交通的需求出发,运用BP神经网络进行船舶行为预测,思路是将海域内船舶的历史行为状态和当前行为状态作为网络输入,将未来船舶行为表征数据作为网络输出,通过与真实值相对比训练网络,建立历史船舶行为与未来船舶行为表征数据之间的映射关系,实现对未来船舶行为状态的推算和预测。对于单艘船舶,其在t时刻的行为Y(t)可表示为
Y(t)={λt,φt,Vt,Ct}
(13)
式(13)中:λt,φt,Vt,Ct分别为船舶在t时刻的经度、纬度、对地航速和对地航向。
通常船舶未来时刻的船舶行为状态是历史行为状态或当前行为状态随时间运动和变化的结果。因此,为提高船舶行为预测的准确性,将t-2,t-1和t等连续3个时刻的船舶航行行为数据Y(t-2),Y(t-1)和Y(t)作为网络输入,将t+1时刻的船舶航行行为表征数据Y(t+1)作为输出,训练神经网络的参数。根据BP神经网络训练过程中的数学表达式,船舶航行行为预测模型的表达式为

(14)
对于式(14),可从表达式形式上将其看作是一个以过去时间序列的船舶航行行为特征[Y(t-2),Y(t-1),Y((t)]为自变量,以未来时刻船舶航行行为特征值Y(t+1)为函数值的一个非线性映射函数。
3 实例分析
为验证所提方法的有效性,以成山角VTS水域内船舶AIS信息为试验数据,构建BP神经网络模型,进行船舶行为实时预测。由于船舶AIS设备发射数据的频率取决于船舶航行速度,因此为保证预测时间间隔的一致性,选择航速在3~14 kn的在航船舶发射的数据,此时AIS数据的发射频率为10 s。[12]选取保证是有效传输和接收的时间间隔为10 s的165组船舶AIS数据作为原始数据(150组作为训练数据,余下15组作为测试数据),以此测试训练后网络预测的预测性能。根据式(13)和式(14)及船舶航行行为的AIS数据表征模型可得到神经网络预测模型为一个具有12个输入神经元节点、4个输出神经元节点的网络,由式(13)估算得到隐含层神经元的最佳个数区间为[4,14]。
对训练数据作离差归一化处理,设定不同隐含层神经元节点,将t-2,t-1和t等连续3个时刻的船舶行为表征数据Y(t-2),Y(t-1),Y(t)作为网络输入,将t+1时刻的船舶行为表征数据Y(t+1)作为输出,以此训练BP神经网络的各项参数。在试验中,可设置不同的隐含层神经元节点数,通过比较神经网络均方误差值,选择误差最小的神经元个数作为参数,试验过程中不同隐含层神经元节点下神经网络的均方误差见图3。
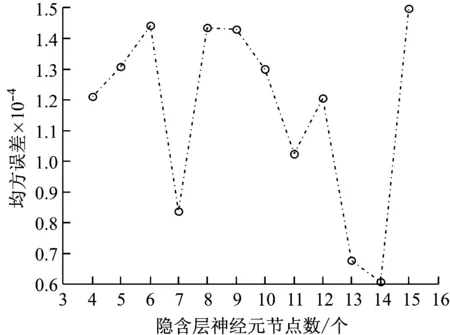
图3 网络均方误差分布
由图3可知,当隐含层神经元节点为14个时,神经网络的均方误差最小,因此可将神经网络的最佳隐含层神经元节点数设置为14个,所选实例的船舶航行行为预测模型是一个12-14-4结构的BP神经网络。
根据确定的最佳网络结构及训练好的BP神经网络参数,将Y(148),Y(149)和Y(150)等3个时刻的船舶行为数据作为BP神经网络的初始输入,通过递归的方法逐步预测Y(151)~Y(165)的船舶行为表征值,得到的预测值及误差分析见图4~图7。
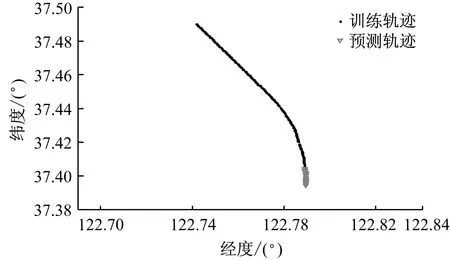
图4 船舶轨迹预测结果
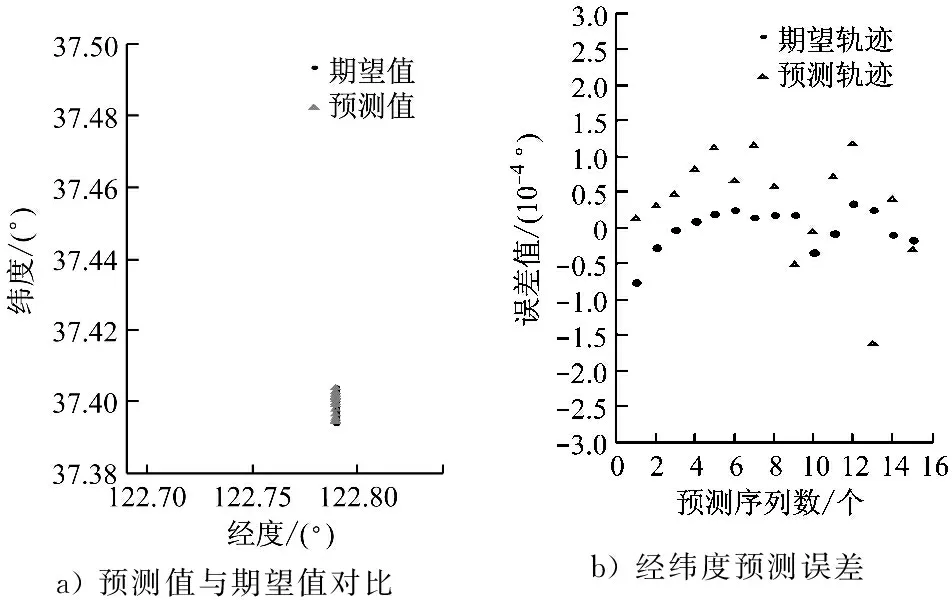
a)预测值与期望值对比b)经纬度预测误差
图5 船舶轨迹预测误差
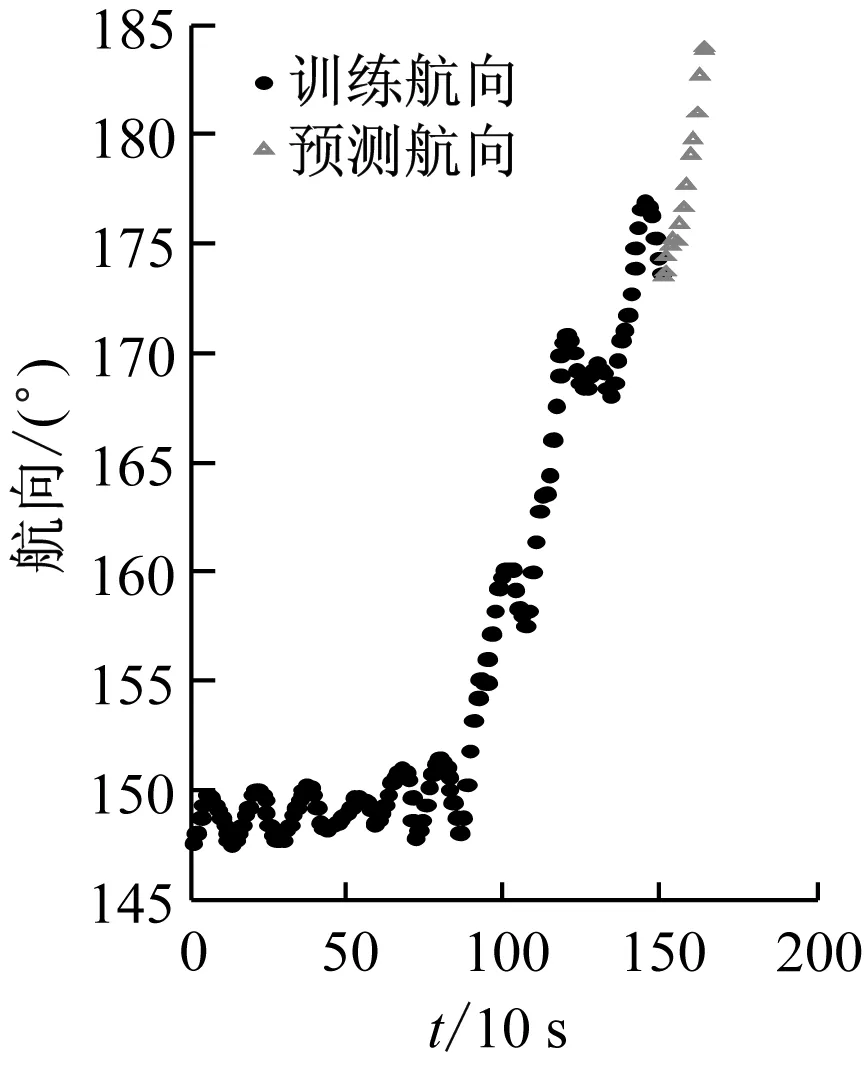
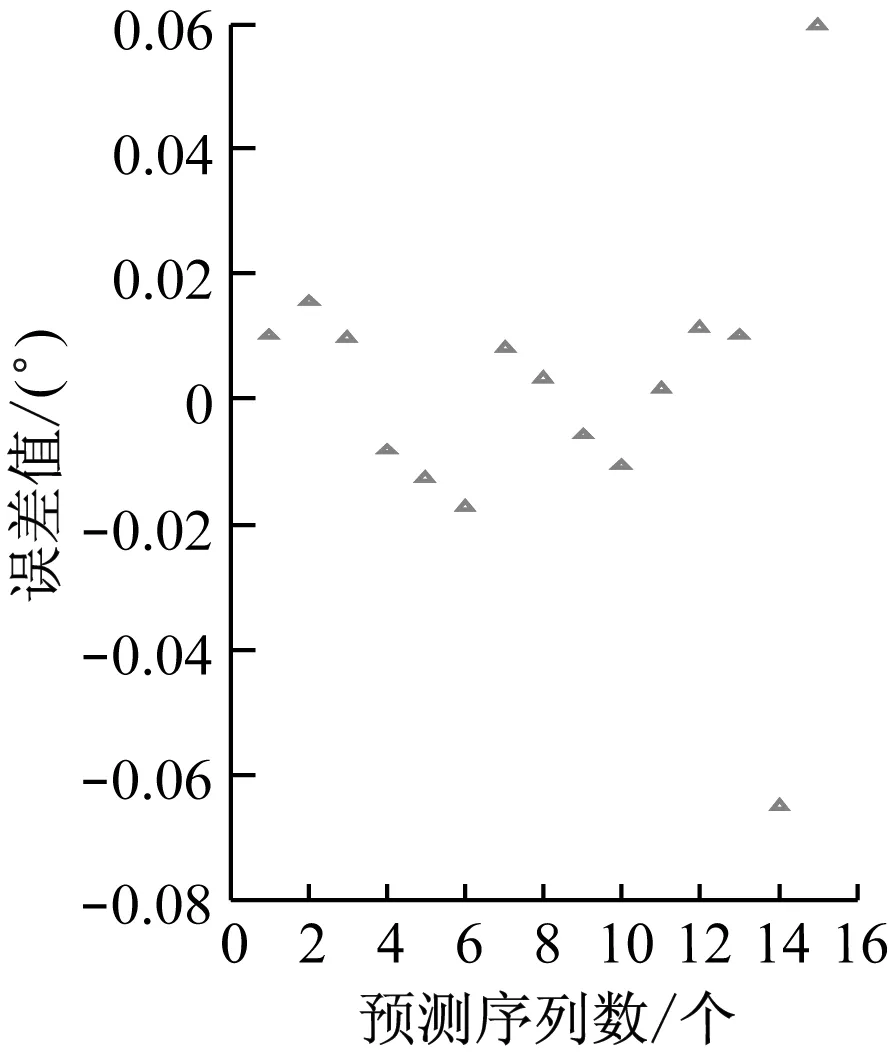
a) 航向预测
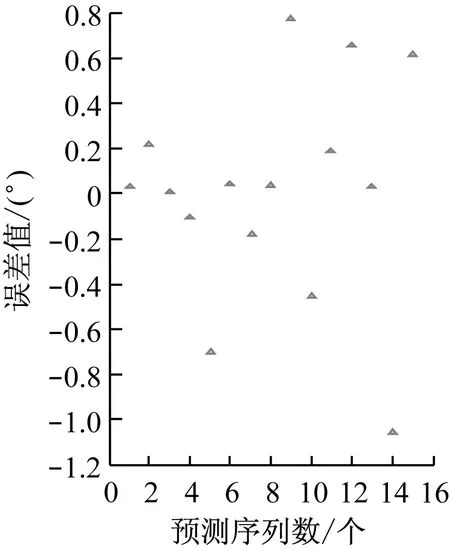
b) 航向预测误差图6 船舶航向预测结果
在图4中,实心点为训练集船舶轨迹(经度、纬度)分布,三角号为运用BP神经网络预测得到的船舶轨迹,可看出预测的轨迹运动延续了训练集船舶的航行趋势。
为定量表达预测轨迹与期望轨迹之间的误差,在图5中对其进行对比,其中实心点和三角号分别代表经度误差及纬度误差。从图5a中可看出,预测轨迹值与期望轨迹值近乎重叠;从图5b中可看出,15个船舶经纬度预测误差值最大为1.5×10-4。
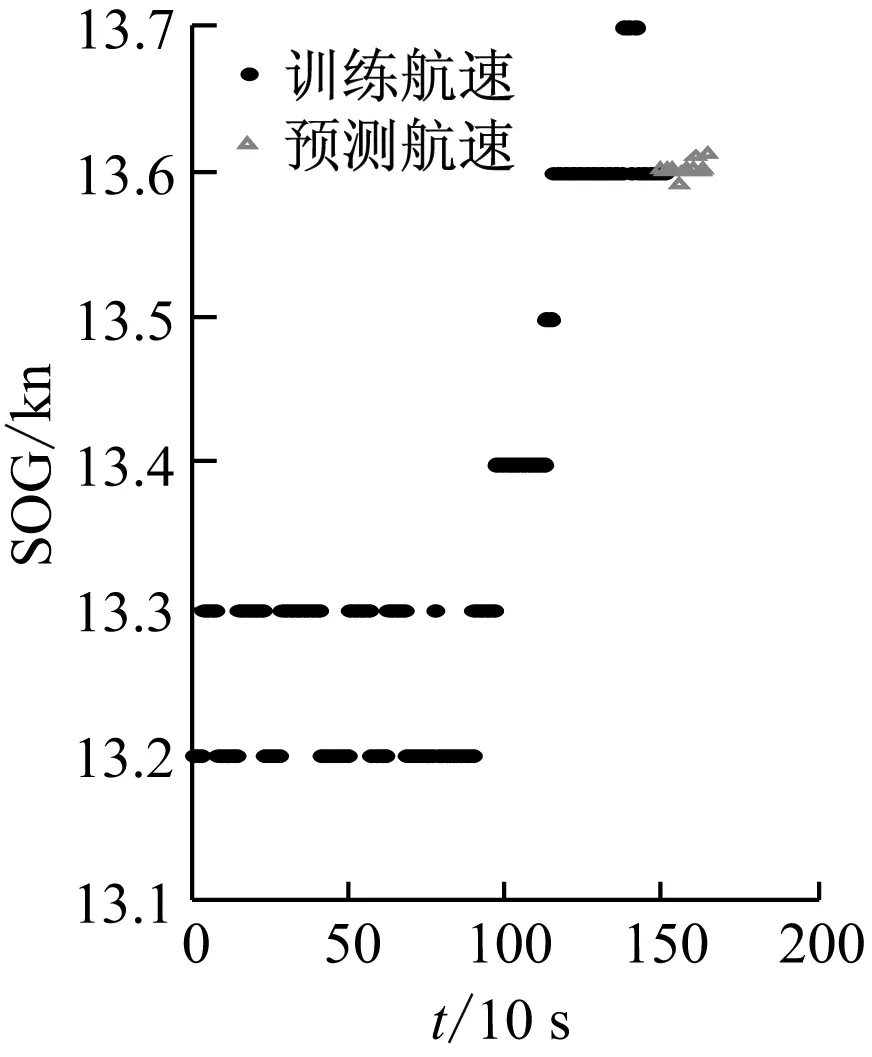
a) 航速预测
b) 航速预测误差图7 船舶航速预测结果
图6为船舶航向预测结果,图6a中用三角号标识的预测航向与训练航向的变化趋势一致,由图6b可知船舶航向预测误差最大为1°。图7为船舶航速预测结果,由图7b可知船舶航速预测的误差值最大为0.06 kn。
通过对VTS中心值班人员和船舶驾驶员进行调研可知,船舶轨迹的经度、纬度、航向和航速等船舶航行行为特征值预测误差均在可接受的范围内,预测结果的精度满足VTS中船舶航行行为监控和航海实践的需求。
4 结束语
通过对船舶航行行为预测进行研究,根据船舶AIS信息的特点,构建基于AIS信息的船舶航行行为表达模型,提出结合AIS信息和BP神经网络的船舶航行行为预测方法。运用提出的方法对成三角VTS水域内150组船舶航行行为数据进行试验,利用训练好的BP神经网络对后续船舶行为特征值进行预测。通过对预测值和原有的15组真实的测试数据进行误差对比分析,得到BP神经网能对船舶的经度、纬度、航速及航向等船舶行为特征值随时间发展变化进行有效的学习和辨识,从而对未来船舶航行行为进行精确、实时的预测。该研究可为VTS中船舶航行行为预测提供新的理论依据。
本文以历史船舶行为特征数据作为神经网络的训练数据验证所提出方法的可行性,接下来将利用船舶行为各项预测误差实时更新和优化神经网络的参数,实现船舶行为的在线学习和预测,以进一步减小船舶行为预测误差,提高船舶航行行为各项特征值的预测精度。
[1] 徐铁,蔡奉君,胡勤友,等.基于卡尔曼滤波算法船舶AIS轨迹估计研究[J].现代电子技术,2014,37(5):97-100.
[2] 赵帅兵,唐诚,梁山,等.基于改进卡尔曼滤波的控制河段船舶航迹预测[J].计算机应用,2012,32(11):3247-3250.
[3] PERERA L P,OLIVEIRA P,SOARES C G.Maritime Traffic Moni-toring Based on Vessel Detection,Tracking,State Esti-mation,and Trajectory Prediction[J].IEEE Transactions on Intelligent Transportation Systems,2012,13(3):1188-1200.
[4] 王艳锋,李红祥.桥区水域失控船舶的航迹预测[J].武汉船舶职业技术学院学报,2011,10(4):36-38.
[5] 刘锡铃,阮群生,龚子强.船舶航行GPS定位轨迹的新预测模型[J].江南大学学报(自然科学版),2014,13(6):686-692.
[6] 徐婷婷,柳晓鸣,杨鑫.基于BP神经网络的船舶航迹实时预测[J].大连海事大学学报,2012,38(1):9-11.
[7] TONG Xiaopeng,CHEN Xu,SANG Lingzhi,et al.Vessel Trajectory Prediction in Curving Channel of Inland River[C]//The 3rd International Conference on Transportation Information and Safety,2015.
[8] 上海迈利船舶科技有限公司.船队在线[EB/OL].(2015-05-15)[2016-05-05].http://www.hifleet.com.
[9] 韩敏.人工神经网络基础[M].大连:大连理工大学出版社,2014:49-52.
[10] 高鹏毅.BP神经网络分类器优化技术研究[D].武汉:华中科技大学,2012.
[11] 张庆庆,贺兴时.BP神经网络结点数选取的改进方法及其应用[J].西安工程大学学报,2008,22(4):502-505.
[12] 孙文力,孙文强.船载自动识别系统[M].大连:大连海事大学出版社,2004:21.
VesselBehaviorPredictionBasedonAISDataandBPNeuralNetwork
ZHENRong,JINYongxing,HUQinyou,SHIChaojian,WANGShengzheng
(Merchant Marine College,Shanghai Maritime University,Shanghai 201306,China)
In view of the multi-dimensional characteristics of vessel behavior,a novel method of vessel behavior prediction based on AIS(Automatic Identification System) data and BP(Back Propagation) neural network is proposed to satisfy the requirement of VTS(Vessel Traffic Service) for accurate real-time vessel behavior prediction.The feature expressions of vessel behavior based on AIS data is established.The training process is as following:the longitude,latitude,heading and speed of a vessel is taken as the ship behavior feature input to the neural network; data at three consecutive times are input to the network,and the fourth data following the input is output to train the BP neural network.The trained BP neural network is applied to the prediction of vessel behavior.The effectiveness and capability of the proposed method is verified with the AIS data from the waters of Chengshanjiao VTS.The results show that the method can predict the characteristics of vessel behavior timely with acceptable accuracy.
waterway transportation; vessel behavior; prediction; AIS data; BP neural network
U675.7;TP391
A
2017-02-26
国家自然科学基金(51379121);国家留学基金委联合培养博士生项目(201608310093);上海市科委地方院校能力建设项目(15590501600);上海海事大学研究生创新基金(2016ycx077);上海海事大学优秀博士学位论文培养项目(2017bxlp003)
甄 荣(1990—),男,内蒙古乌兰察布人,博士生,从事海上交通信息处理方向研究。E-mail:zrandsea@163.com
1000-4653(2017)02-0006-05
