船舶异常行为研究进展及发展趋势
2017-10-30刘甜甜初秀民陈良臣曹秀峰
高 曙, 刘甜甜, 初秀民, 陈良臣,2, 曹秀峰
(1.武汉理工大学 a.计算机科学与技术学院; b.交通物联网技术湖北省重点实验室;c.智能交通系统研究中心,武汉 430063;2.中国劳动关系学院 计算机教研室,北京 100048)
船舶异常行为研究进展及发展趋势
高 曙1a,1b, 刘甜甜1a, 初秀民1c, 陈良臣1a,2, 曹秀峰1a
(1.武汉理工大学 a.计算机科学与技术学院; b.交通物联网技术湖北省重点实验室;c.智能交通系统研究中心,武汉 430063;2.中国劳动关系学院 计算机教研室,北京 100048)
对船舶异常行为的研究进展、存在的问题及未来发展趋势进行总结和分析。对船舶行为及其异常识别的基本概念和分类进行介绍,提出船舶异常行为识别过程;对船舶异常行为的检测方法进行归纳分类,分述各类方法的研究现状,并剖析存在的问题;针对航运大数据及云计算的利用,阐述船舶异常行为研究面临的机遇和挑战,说明其未来发展方向。
水路运输;船舶异常行为;AIS数据;大数据;云计算
据《2014年度交通运输安全生产事故报告》(水上交通领域)统计,在全口径事故(包括等级以下事故)数据中,仅碰撞事故就涉及船舶1 285艘,占发生事故船舶总数的71.5%。[1]由此可见,随着水上运输业务日益增多,交通流密度日益加大,船舶逐步朝大型化、专业化和高速化方向发展,通航环境将愈加复杂,影响船舶航行安全的因素将不断增多,水上交通事故发生概率将进一步增大,会给国民经济和生命财产安全带来严重威胁。
船舶是水上交通的行为主体,对其异常行为进行研究是水上安全监控和管理的重要内容。近年来,随着船舶自动识别系统(Automatic Identification System,AIS)、船舶交通管理系统(Vessel Traffic Service,VTS)、雷达及各类传感器等设备的应用不断深入,船舶航行过程中自动采集的船舶动态数据、静态数据和水文气象数据等呈现出几何增长的态势。[2]因此,对船舶航行数据进行分析并找出其规律,由此识别出船舶航行的异常行为,是目前水上交通领域的研究热点之一。
1 船舶行为及其异常识别的概念
船舶行为一般指船舶在驾驶人员的操纵下以航行和避让为主要目的所采取的行为方式及其规律。[3]在水上交通研究中,船舶行为不是某艘船舶的某种具体行为,而是船舶群体的同类行为方式及其规律。当前船舶航行异常行为的定义还没有统一,“异常”一般是指观测到的事物与所期望的事物、现有准则及现有科学理论有所不同的现象。因此,船舶异常行为研究应建立在船舶正常行为建模之上,以此为标准,将观察到的数据与正常模型相比较,找出差异较大的个体行为(例如横穿主航道、船速过快和偏离航道等)。
异常检测方法通常包含候选异常检测和异常可靠性分析2个阶段。在候选异常检测阶段,通过数理统计分析和数据挖掘等技术检测异常数据,构成候选异常数据。在可靠性分析阶段,对候选异常数据进行过滤和筛选,得到有用的异常数据。
由于船舶异常行为具有时空特性,因此在对候选异常数据进行检测时不仅要检测在时间和空间上表现为异常的数据,还要根据其专题属性(例如速度、航向角等)与其正常行为的比较,判断是否有偏离。同时,由于船舶异常行为受多种因素的影响,因此特别需要将船舶异常行为的可靠性分析置于具体的时空情境下进行[3],并结合领域知识或先验知识对可能造成船舶危险的异常进行辨识。由此,可将船舶异常行为研究分解为图1的形式。
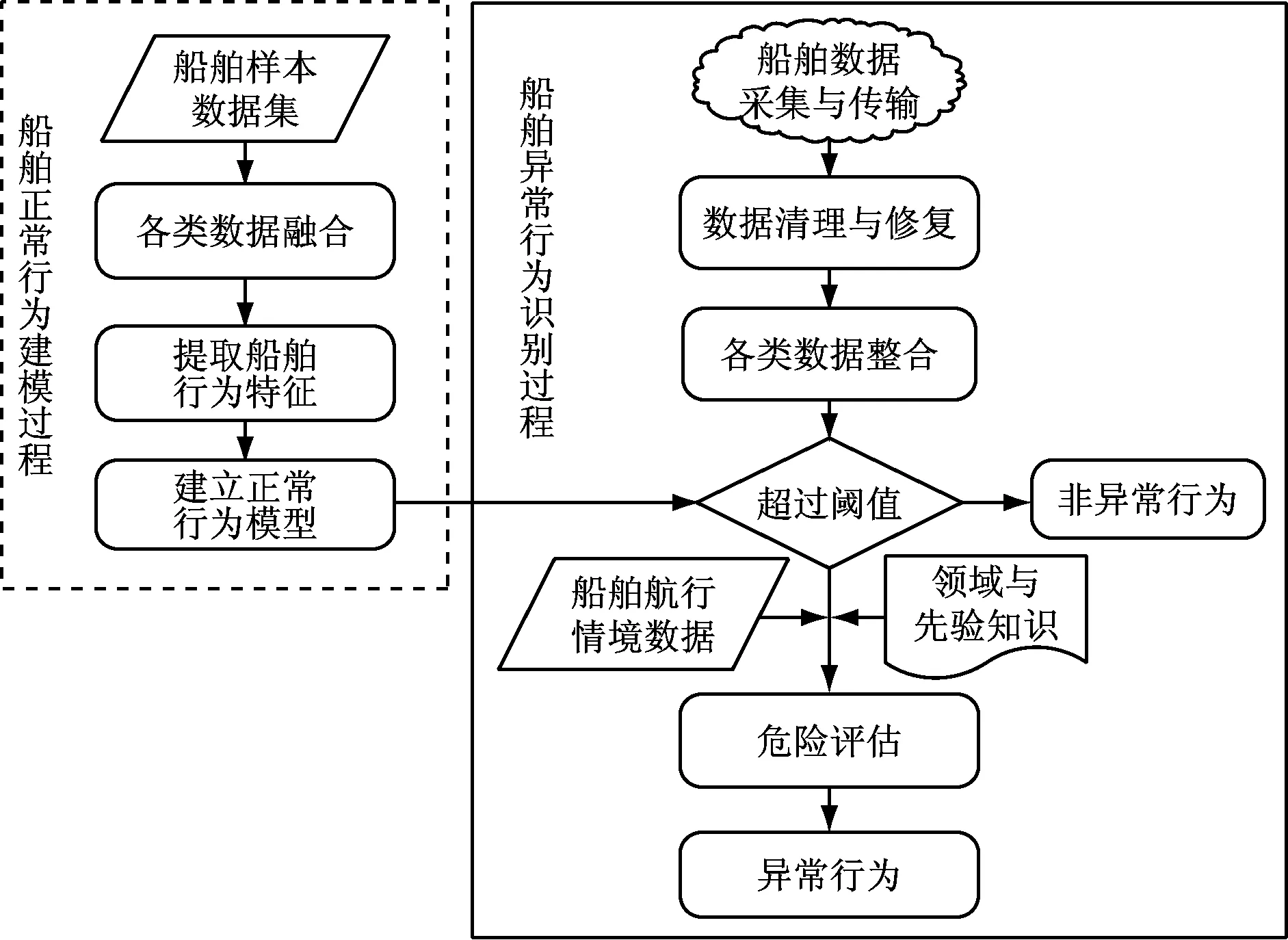
图1 船舶异常行为识别过程
2 船舶异常行为分类
目前对船舶行为的研究大多从船舶密度、船舶速度、船舶轨迹及船舶间距等4个方面描述船舶总体行为特征,船舶异常行为主要根据其运动、位置上的异常进行判别。因此,根据文献[4],将船舶异常行为分成16大类(见图2),船舶航行异常检测一般需将其全部覆盖。
3 船舶异常行为研究进展
当前,数据挖掘领域中的异常检测方法众多(主要有基于分布的方法、基于距离的方法、基于密度的方法、基于深度的方法和基于聚类的方法等5类),但结合船舶行为特点进行异常识别的研究[5-7]较少。文献[6]提出一种基于卡尔曼滤波的船舶航行轨迹异常行为预测方法,通过DBSCAN算法对AIS历史数据进行密度聚类得到正常的船舶历史航迹图谱,结合卡尔曼滤波算法对船舶航行轨迹和船舶实时数据状态进行预测,并给予实时警告。
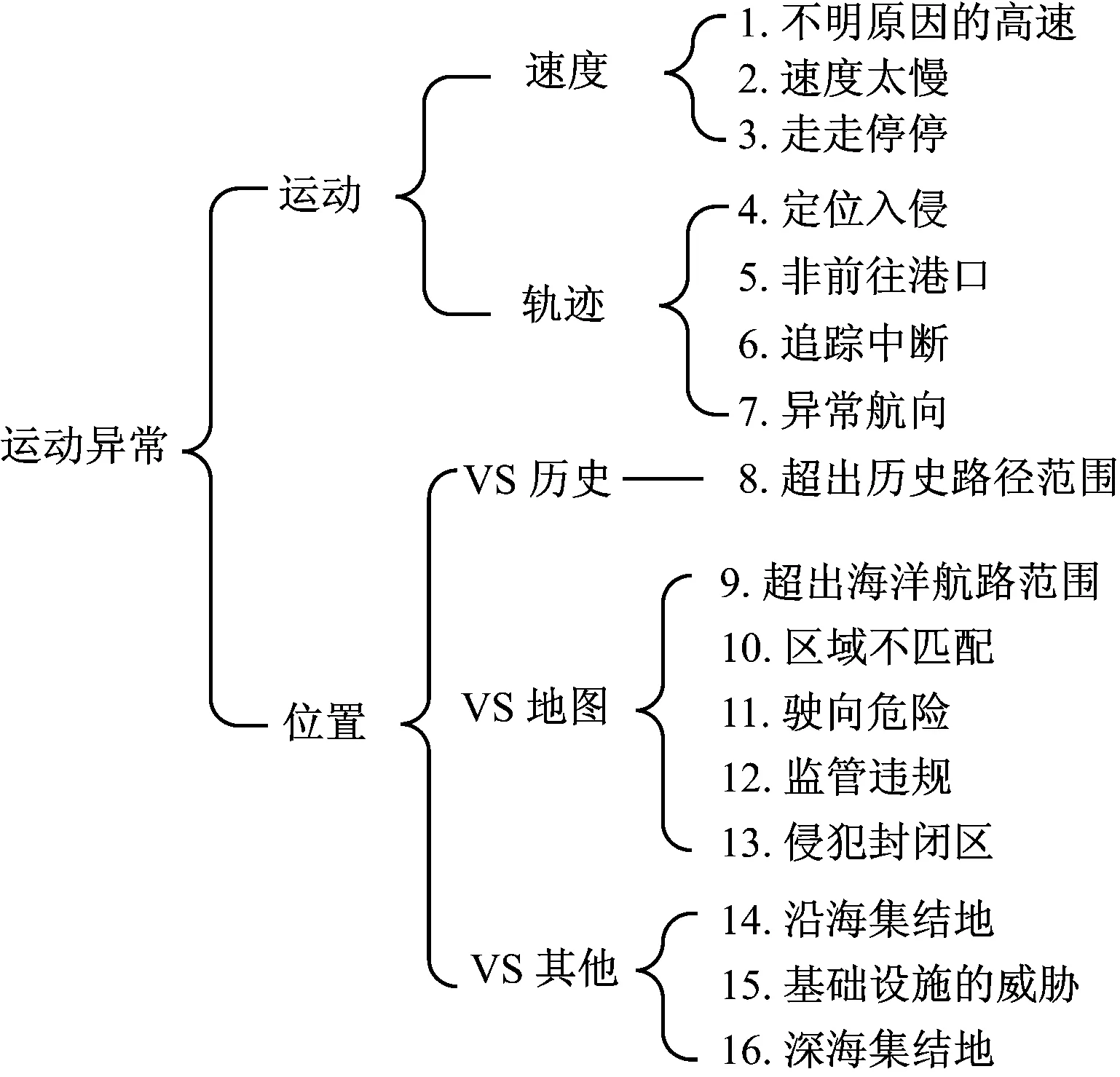
图2 船舶异常行为分类
当前国外已有不少针对船舶航行异常检测的技术和方法,可进一步将其细化为基于神经网络的方法、基于统计的方法和基于机器学习的方法[4],每种方法又采用1种或多种技术(见图3)。
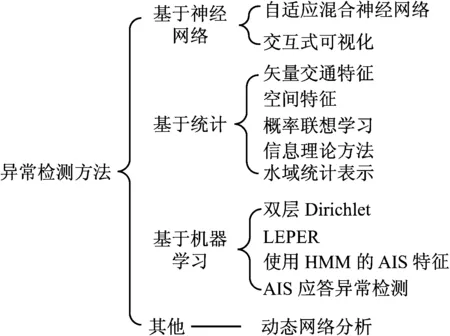
图3 船舶异常行为研究方法分类
3.1基于神经网络的方法
当前针对基于神经网络的异常检测的研究有很多,且应用多种多样。神经网络能很好地归纳一些不可见的模式,学习复杂的分类界线。WAXMAN等[8]提出一种利用传统方法不能解决的船舶群体复杂行为问题求解方法,用船舶群体的中心代替整个船舶群体,将船舶运动分解到RED三维上求和,利用RED三维上的轨迹形成船舶运动轨迹,通过神经网络方法对轨迹进行分类。RIVEIRO等[9]提出一种基于高斯模型聚类的异常检测方法,在图形可视化中加入用户交互,在数据处理过程中对已有知识或经验进行实时更新,提高准确率和可靠性。RHODES等[10-11]利用AIS数据,通过人工神经网络模型学习船舶正常行为,从而进行船舶异常行为检测和轨迹预测;此外,以AIS数据为样本,提出一种模糊神经网络模型,学习正常的船舶运动,实现对船舶异常行为的识别。
基于神经网络的异常检测方法存在的最大问题是整个训练过程非常封闭。输入神经元与输出神经元之间的处理不易理解,不能为操作者提供解释或理由。在神经网络准备好分类新数据之前,需进行培训和测试,以进行网络调整和阈值确定等。
3.2基于统计的方法
基于统计的方法有参数统计和非参数统计2类,其中:参数统计方法在数据有对应统计模型的前提下,可采用无监督方式迅速检测到异常;非参数统计方法中数据的基础分布没有任何假定。尽管该方法需更多资源,但被认为是一种较为实用的自动化异常检测方法。SOLEIMANI等[12]从几何学的角度分析船舶航线,使用A*算法找出最优路径,引入轨迹长度、曲线面积、纬度轨迹梯度和经度轨迹梯度等4个特征,采用无监督增量学习方法比较船舶真实轨迹与最优路径的特征偏离,获得轨迹异常值。该方法无需训练,不受地理空间大小的限制,可应用在更大范围内和不同的数据集上。LEI[13]提出一种针对海域移动对象探索轨迹行为的异常检测模型,使用船舶相应的位置信息构建概率树,探究航行轨迹并判断其是否异常。该模型可解决数据过多、过于复杂的问题,但只能检测是否发生异常,难以获取异常轨迹的信息。JEONG等[14]提出一种基于使用概率主题模型的区域和速度观测轨迹模式建模方法,通过将高斯模型嵌入到离散主题模型中,将语义识别的LDA算法应用到轨迹预测上,使用分步贪心算法进行分类,提出双阶段在线推理模型,提高交通分析模式和异常检测的效率及精准度。该方法考虑时空关系及对象速度,并使用分步贪心算法,因此可减少问题的维度。AVRAM等[15]提出一种基于海域时空数据的异常检测方法,定义一个坐标与时间的数据集,结合数据驱动和模型驱动2种方法逐级对数据进行检测,并与感兴趣的行为对比,判断是否为异常行为或异常行为描述。该方法的优点是结合2种方法,能全面检测;不足是实现难度较大,且需建立大量模型,难以设定一个好的标准。LIU等[16]提出一种基于密度的船舶运动轨迹知识聚类方法,从历史AIS数据中提取出正常轨迹作为集群中心(即中心向量),将离群较多的点定义为异常;同时,将速度考虑在内,设定相应的速度阈值,超出范围即为异常。JAKOB等[17]以样本轨迹数据为对象,构建一个混合高斯模型(Gaussian Mixture Model,GMM),学习不同类型船舶的正常行为模式,探测异常的和非法的船舶行为。BALDACCI等[18]提出一种矢量交通特征的概念,为获取与海中航线相关的矢量,使用AIS联络点和图像处理技术,在地图上标记AIS联络站点,经过过滤,利用一种边缘检测算法提取海洋的段,对这些段进行聚类,每个聚类只选取1个段,每个选出的段将形成特征为高斯分布的海道区域,船舶根据自身与相应段的距离关联海道区域。
基于统计的异常检测方法很容易实现,但仅限于处理特定的问题。若异常被均匀地分散在样品中,则统计方法是无效的。此外,由于很难确定一个正常分布分离异常值的阈值,因此统计方法存在误报的可能性很大。
3.3基于机器学习的方法
机器学习方法是指自动学习复杂的数据结构、已有的异常和正常模式,对异常行为的特征进行概率推断和模糊匹配,建立学习模型,从而发现未知的异常,提高异常检测的自适应性。目前使用的技术主要有决策树、遗传编程、支持向量机、贝叶斯网络和聚类等。LANE等[19]提出一种基于贝叶斯网络聚变的异常行为检测方法,将船的异常行为总结为偏离、AIS接收异常、异常抵港、相互靠近和区域进入等5种,计算每种异常行为发生的概率,使用贝叶斯网络对各种异常行为进行聚变,得出该行为产生威胁的概率。WANG等[20]提出一种针对船舶航线活动异常的二层检测方法,其中:第1层考虑速度和方向噪声,提出一种基于密度的空间聚类算法DBSCAN_SD,采用非监督技术对数据点进行预聚类,判断是正常还是异常,并标记;第2层在Hadoop上对标记数据训练并行元学习算法,提高效率。SNIDARO等[21]提出基于异常分层和马尔可夫逻辑网络的态势检测工具,将海洋异常分为4层,使用JDL混合模型建立相关性,提出一种基于马尔可夫逻辑网络的海洋态势检测工具,更好地检测船舶运行过程中的异常态势。KOWALSKA等[22]提出一种基于高斯处理数据驱动的无参贝叶斯模型,通过主动学习AIS历史数据选择一个训练集,使用高斯处理法创建一个正常船舶的运动模型,根据速度、航向及对应的经纬度对船舶状态进行异常度量。OKTARINA等[23]提出一种使用支持向量机的船舶追踪异常检测方法,使用SVM分类器采集大量的船舶正常行驶和非正常行驶原始数据集,将这些数据集分成2组,分别进行训练和测试,探究最佳样本比例。TAN等[24]提出一种隐马尔可夫异常检测模型,机器学习一种特定程序的正常行为,通过比对检测到异常;同时,构造一个隐马尔可夫模型,设计一种基于HSMM的异常检测算法,用于计算入侵检测系统监控过程与完善正常过程,基于最大熵原理(MEP),引入平均信息熵的概念(AIE),构造出计算机系统的正常行为。MASCARO等[25]提出一种基于贝叶斯网络的船舶追踪异常检测模型,获取AIS数据,使用贝叶斯网络的概率推理模型进行分析,建立静态和动态2个模型,对未知行为进行预测,获取数据并进行对比,判断是否出现轨迹异常。LUO等[26]提出一种改进的无监督异常检测算法,该算法结合误用检测和异常检测,使用误用检测提前过滤已知错误和正常情况,使用异常检测定义合理的阈值,超过该阈值的数据即为异常。CHEN等[27]以AIS数据、船级社数据、港口管理部门和海事安全保证部门提供的数据等数据为样本,提出一种基于遗传算法(GA)的知识发现系统学习正常的船舶行为,以探测异常船舶。BALDACCI等[28]开发一个AIS异常模拟器工具,用来模拟AIS的状态、运动和位置异常,将AIS异常模拟器应用到AIS发射模型中,构建AIS随机或确定路径的时间序列,并通过XML文件添加路标制成输入,进行AIS异常追踪。GRIFFIN等[29]建立一个学习与预测系统LEPER,该系统使用军事网格参考系统将船舶的轨迹分解为离散平方序列,通过HMM计算这些序列中网格位置之间的转移概率;为检测异常,该系统使用一个连续模型预测船舶的位置,并与HMM预测结果相比较。
在实际应用中,机器学习面临着高维特征空间与样本数不足、寻找最优解困难和可解释性差等挑战。
3.4其他方法
ROSÉN等[30]提出一种基于轨迹数据的在线异常检测算法,针对特定的环境定义一条正常路径,基于该路径计算出相似位置,得到一定宽度的正常路径,将超出该范围定义为异常。RIVEIRO等[31]提出一种与正常船舶行为模型相匹配的异常检测方法,建立实时的船舶正常行为模型和态势图,将新进数据与正常行为模型相匹配,检测出异常行为。DRAGOS等[32]提供一种支持海事领域异常分析的新方法,通过观测或利用复杂模型提供信息检索策略,从指导短期纠正措施的基本事实中检索到能帮助领域专家理解和解释船舶异常行为的更复杂网络范畴界定,使用通用标准语义集成各种信息源,利用信息检索支持海上船舶异常行为的检测、分析和解释。
4 现状分析
通过查阅相关文献发现,船舶异常行为分析主要存在以下3方面问题。
4.1船舶行为建模的动态性
建立船舶行为模型是异常行为检测的基础,而目前主要基于历史数据进行离线式建模,没有依据实时数据对船舶行为进行动态建模或更新。因此,船舶行为建模方式本身存在一定的缺陷。
4.2异常行为检测的全面性
目前异常检测的对象大多比较单一。例如,仅从轨迹、速度、加速度、航向角和密度中的某个方面或某2个方面进行检测,缺乏综合性。
4.3异常行为识别的情境相关性
船舶异常行为的判断与船舶航行所处环境有很强的关联性,依据先验或领域知识,相同的航行运动在某些情境下是异常的,而在另一些情境下可能是正常的。因此,需将船舶运动行为置于具体的时空情境下判断,而目前这方面的研究较少。
5 发展趋势与挑战
随着互联网和物联网技术飞速发展,在安全监管方面已初步形成由全球卫星定位系统、中国船舶远程识别与跟踪系统、闭路监控电视系统、无线射频识别系统、AIS和VTS等组成的海事立体化监管体系。同时,海事部门建立有完备的船舶数据库和船员数据库;数字航道和智能航道的建设可为感知航道提供水文、气象及通航条件等方面的数据,从而为船舶异常行为分析提供数据基础。这些数据不仅容量大、来源广、类型多样,而且彼此关联复杂,构成航运大数据,具有大数据的4个基本特征(即数据规模大、数据种类多、数据要求处理速度快和数据价值密度低)。然而,航运大数据在带来机遇的同时也带来一定的挑战,只有采用新处理模式才能更全面、及时、准确地识别船舶异常行为。因此,可将船舶异常行为研究的发展方向和面临的挑战归纳为以下3个方面:
1) 探索面向大数据的船舶行为建模方式。船舶行为建模是异常识别的关键及核心,而目前的建模方式主要基于单一对象的小数据样本,侧重于根据先验知识预先人工建立模型,依据既定模型进行行为建模。但是,航运大数据在带来更多知识和更大价值的同时,也带来大量的不确定性,从而导致以样本描述整体行为出现偏差的可能性增大,甚至增大发生错误的风险或遗漏需发现的知识。因此,面向航运大数据,需重新考虑统计模型选择、参数训练等问题,并探索新的数据挖掘算法,动态构建船舶行为模型。
2) 结合情境分析识别船舶异常行为。船舶异常行为识别与其所处的时空环境具有强关联性,只有综合挖掘气象、水文、航道拓扑结构、交通流状况、船舶本身的静态和动态属性、航行规则及人员等情境因素才能有效判断可能对船舶造成危险的异常,从而提高识别的准确度。
3) 基于新的数据处理挖掘平台。航运大数据不仅数据量巨大,而且所蕴含的知识价值会随着时间的流逝而逐渐衰减。异常行为识别具有极高的实时性要求,因此相应的数据分析必须快速、高效,甚至是实时处理。云计算的出现为航运大数据的有效利用带来了契机,利用其分布式文件系统存储船舶航行数据,利用其MapReduce并行计算方式加速船舶行为建模及异常识别,为船舶异常行为研究提供新思路和新方法。
6 结束语
船舶异常行为研究一直是海事安全科学理论的基础问题,面对新问题研究新方法,进一步探索船舶异常行为识别的理论和技术,对保证船舶安全航行,规避风险,减少虚警,促进水路运输畅通、平安、绿色和高效的发展均具有重要意义。
[1] 中华人民共和国交通运输部[EB/OL].[2015-04-01].http://www.moc.govcn.
[2] 徐武雄,初秀民,刘兴龙.水上交通信息可视化技术研究进展[J].中国航海,2015,38(1):34-38.
[3] 吴兆麟,朱军.海上交通工程[M].2版.大连:大连海事大学出版社,2004.
[4] DAVENPORT M.Kinematic Behaviour Anomaly Detection (KBAD) Final Report [R].DRDC CORA Report,2008.
[5] 甄荣.基于AIS信息的港口水域船舶异常行为识别研究[D].厦门:集美大学,2015.
[6] 邱洪生.基于卡尔曼滤波的船舶航行轨迹异常行为预测算法研究[D].天津:河北工业大学,2012.
[7] 甄荣,邵哲平,潘家财,等.基于统计学理论的船舶轨迹异常识别[J].集美大学学报(自然科学版),2015,20(3):193-197.
[8] WAXMAN A,HU Haijun,MARTIN D.Maritime Group Motion Analysis:Representation,Learning,Recognition,and Deviation Detection[C].18th International Conference on Information Fusion.IEEE,Washington DC,2015:1015-1021.
[9] RIVEIRO M,FALKMAN G,ZIEMKE T.Improving Maritime Anomaly Detection and Situation Awareness Through Interactive Visualization[C].11th International Conference on Information Fusion.IEEE,Cologne,2008:47-54.
[10] RHODES B J,BOMBERGER N A,ZANDIPOUR M.Probabilistic Associative Learning of Vessel Motion Patterns at Multiple Spatial Scales for Maritime Situation Awareness[C].10th International Conference on Information Fusion,2007:1-8.
[11] RHODES B J,BOMBERGER N A,SEIBERT M.Maritime Situation Monitoring and Awareness Using Learning Mechanisms[C].Military Communications Conference,Atlantic City,2005:646-652.
[12] SOLEIMANI B H,SOUZA E N D,HILLIARD C,et al.Anomaly Detection in Maritime Data Based on Geometrical Analysis of Trajectories[C].18th International Conference on Information Fusion,Washington DC,2015:1100-1105.
[13] LEI P R.Exploring Trajectory Behavior Model for Anomaly Detection in Maritime Moving Objects[C].2013 IEEE International Conference on Intelligence and Security Informatics ,Seettle WA,2013:271.
[14] JEONG H,YOO Y,YI K M,et al.Two-Stage Online Inference Model for Traffic Pattern Analysis and Anomaly Detection[J].Machine Vision and Applications,2014,25(6):1501-1517.
[15] AVRAM V,GLASSER U,YAGHOUBI H Y.Anomaly Detection in Spatiotemporal Data in the Maritime Domain[C].IEEE International Conference on Intelligence and Security Informatics,Arlington VA,2012:147-149.
[16] LIU B,SOUZA E N,MATWIN S,et al.Knowledge-Based Clustering of Ship Trajectories Using Density-Based Approach[J].IEEE International Conference on Big Data,Washington DC,2014:603-608.
[17] JAKOB M,VANEK O,PECHOUCEK M.Using Agents to Improve International Maritime Transport Security[J].IEEE Intelligent Systems,2011,26(1):90-96.
[18] BALDACCI A,ROLLA S,CARTHEL C.Maritime Traffic Characterization with the Automated Identification System[R].La Spezia,Italy:NURC-FR,2009.
[19] LANER D,NEVELL D A,HAYWARD S D,et al.Maritime Anomaly Detection and Treat Assessment[C].13th Conference on Information Fusion,Edinburgh,2010:1-8.
[20] WANG Xiaoguang,LIU Xuan,MATWIN Stan.Vessel Route Anomaly Detection with Hadoop MapReduce[C].IEEE International Conference on Big Data,Washington DC,2014:25-30.
[21] SNIDARO L,VISENTINI I,BRYAN K,et al.Markov Logic Networks for Context Integration and Situation Assessment in Maritime Domain[C].15th International Conference on Information Fusion,Singapore,2012:1534-1539.
[22] KOWALSKA K,PEEL L.Maritime Anomaly Detection using Gaussian Process Active Learning[C].15th International Conference on Information Fusion,Singapore,2012:1164-1171.
[23] OKTARINA D,HANDAYANI D,SEDIONO W,et al.Anomaly Detection in Vessel Tracking Using Support Vector Machines[C].International Conference on Advanced Computer Science Applications and Technologies,2013:213-217.
[24] TAN Xiaobin,XI Hongsheng.Hidden SemiMarkov Model for Anomaly Detection[J].Applied Mathematics and Computation,2008,205(2):562-567.
[25] MASCARO S,NICHOLSOB A E,KORB K B.Anomaly Detection in Vessel Tracks Using Bayesian Networks[J].International Journal of Approximate Reasoning,2014,55(1):84-98.
[26] LUO Na,YUAN Fuyu,ZUO Wanli,et al.Improved Unsupervised Anomaly Detection Algorithm[C].Third International Conference RSKT 2008,Chengdu,2008:532-539.
[27] CHEN C H,KHOO L P,CHONG Y T.Knowledge Discovery Using Genetic Algorithm for Maritime Situational Awareness[J].Expert System with Applications,2014,41(6):2742-2753.
[28] BALDACCI A.Automated Identification System Anomaly Simulator[R].La Spezia,Italy:NURC-MR,2008.
[29] GRIFFIN C.Learning and Prediction for Enhanced Readiness:An ONR Office 31 Program[R].Presentation to TTCP MAR AG-8,2009.
[30] ROSÉN O,MEDVEDEV A.An Online Algorithm For Anomaly Detection in Trajectory Data[C].American Control Conference,Montreal,2012:1117-1122.
[31] RIVEIRO M,FALKMAN G.Supporting the Analytical Reasoning Process in Maritime Anomaly Detection:Evaluation and Experimental Design[C].14th International Conference Information Visualisation,London,2010:170-178.
[32] DRAGOS V.From Finding to Explaining:Information Retrieval to Support Maritime Anomaly Analysis[J].International Journal of Knowledge and Systems Science,2016,7(1):40-56.
StatusandResearchTrendsonAbnormalShipBehavior
GAOShu1a,1b,LIUTiantian1a,CHUXiumin1c,CHENLiangchen1a,2,CAOXiufeng1a
(1a.School of Computer Science and Technology; 1b.Hubei Key Laboratory of Transportation Internet of Things; 1c.Intelligent Transport System Research Center,Wuhan University of Technology Wuhan 430063,China; 2.Department of Computer Application,Institute of Industrial Relations China,Beijing 100048,China)
How to detect abnormal ship behavior is an interesting issue.The current status and research trends on abnormal ship behavior are reviewed.Ship behavior and its anomaly identification is introduced,and the abnormal behavior classification and identification process are explained.The detection method of the abnormal ship behavior is classified,and existing problems are presented.Future development direction and advice in related areas are summarized.
waterway transportation; abnormal ship behavior; AIS data; big data; cloud computing
U675.7;TP391
A
2017-02-24
国家自然科学基金(51479155);中央高校基本业务费专项资金(16ZY006);湖北省自然科学基金(2014CFB190)
高 曙(1967—),女,安徽芜湖人,教授,博士生导师,从事水上交通信息化技术研究。E-mail:gshu418@163.com
初秀民(1969—),男,吉林集安人,研究员,博士生导师,从事水路交通智能化技术研究。E-mail:chuxm@whut.edu.cn
1000-4653(2017)02-0038-06
