基于无人机技术的废弃矿山地形精准测量方法
2017-10-27毛崔磊田毅陈建平
毛崔磊 田毅 陈建平
摘要:针对废弃矿山原地形地貌、堆弃物的规模、堆弃物的稳定性未知等问题,以北京市密云某矿区为例,采用无人机技术获取研究区航测数据,提出基于Agisoft PhotoScan的影像三维建模以及精度检验方法,利用Agisoft PhotoScan软件进行定向、点云提取和正射影像图的制作,生成了研究区的三维模型视图。结果表明,该方法可以用于建立废弃矿山的三维模型,缩短了建模的时间,有效降低了成本,为今后废弃矿山地质灾害信息获取提供新的思路。
关键词:无人机技术;Agisoft PhotoScan软件;三维建模
中图分类号: S127文献标志码:
文章编号:1002-1302(2017)16-0198-04
收稿日期:2017-02-08
基金项目:北京市教育委员会课题(编号:京教函〔2015〕282号);国土资源部公益性行业科研专项(编号:201411007-3)。
作者简介:毛崔磊(1992—),男,河南新乡人,硕士,主要从事矿山资源环境研究。E-mail:1042274447@qqcom。
通信作者:田毅,博士,副教授,主要从事土地综合整治、城市地下空间资源定量评价的教学与科研。E-mail:tianyi@cugbeducn。
社会经济的快速发展加快了对矿产资源的开发与利用,在带给社会效益的同时,由于长期不当的矿产开发,对于矿山原地形地貌破坏较大,同时潜在的致灾隐患不断增多,随时可能发展成地质灾害,常见的矿区地质灾害为地面塌陷、边坡失稳、滑坡等,且矿区周边常有居民点,一旦灾害发生将会造成不可估量的经济损失,甚至人员伤亡。
由于长期的开采,矿山废弃物随意堆弃,粗放的堆弃导致原地形原地貌未知,堆弃物的规模未知,堆弃物的稳定性未知,以及可能导致潜在的矿山环境灾害未知,因此对于废弃矿山的地形地貌的精准测量变得尤为重要。
近年来,随着无人机航拍技术的不断成熟,加之无人机低成本,机动性强,大比例尺高精度、维护简单;在小区域和飞行困难地区高分辨率影像快速获取方面具有明显优势,如在灾害发生的区域进行快速的影像获取,以及矿山地形图的快速更新,使得无人机逐渐成为获取更高精度的影像的主要技术手段之一。
本研究以北京密云某废弃矿山为例,提出了利用无人机遥感技术获取的影像来进行三维地形建模,并对废弃矿山地貌精准测量方法进行探讨[2-3]。
1三维重建方法及软件
11研究区简介
密云区位于北京市东北部,属燕山山地与华北平原交接地,总地形为三面环山,中部低缓,西南开口的簸箕形。密云区为暖温带季风型大陆性半湿润半干旱气候。四季分明,干湿冷暖变化明显。地理坐标西起116°39′33″E,东至117°30′25″E,东西长69 km;南起40°13′7″N,北至 40°47′57″N,是华北通往东北、内蒙古的重要门户。
密云区的矿产资源丰富,已探明储量的矿产有25种,主要矿产有金、银、铁、钨、铅等。铁矿储量达95亿t,在全国 2 000 多个县中居19位,占北京地区总储量的964%,石灰岩的储量也有近亿t。
12原始数据的特点及来源
以北京密云某废弃矿山为研究区域,通过无人机利用非量测相机对该地区进行航空摄影测量(所用sony a5100相机参数见表1,相机见图1)。本研究区设计飞行相对高度為 250 m,绝对高度为450 m,无人机上搭载的相机焦距为 285 mm,测区范围总面积达88 km2,获得原始照片663张,同时保证航空摄影测量时60%侧向重叠和80%航向重叠的规范要求。采用GeoFly-X8固定翼无人机,相对于多旋翼无人机其速度更快、效率更高、更节能,适合大范围的高清影像的拍摄,可作业范围甚至可达几十平方公里,是农业监测、矿山监测,灾情监测的首选机型。该无人机飞行高度可达 1 200 m,影像精度为005~010 m,飞行速度35~70 km/h。
121影像特征
在实际飞行中,该区域1个架次完成,共获取663张照片,其中有效照片658张。对应的照片信息见图2。该任务区内包含建筑、道路、植被,各个类型的航拍原始图片细节见图3、图4、图5。
13三维建模软件(Agisoft PhotoScan)
Agisoft PhotoScan是一款基于静态图像构建高精度三维模型的软件。依据最新的计算机多目视觉影像三维重建技术,就可以对具有影像重叠的照片进行处理;也可以通过给予的控制点生成真实坐标的三维模型。其在三维场景中的应用相当广泛,如考古(Agisoft Photoscan 和 Adobe Illustrator软件在田野考古绘图中的综合应用)、工业、军事、医学等诸多领域都可以使用该软件进行处理。整个工作流程都是完全自动化的。
Agisoft PhotoScan区别于其他传统航摄软件的地方在于它使用的是运动信息中恢复三维场景结构(structure from motion,SfM)的方法。SfM三维重建的主要过程如下:(1)利用SIFT算子从每张影像上提取特征点并获取其对应的Descriptor;(2)根据POS或其他约束关系选出可能具有重叠关系的像对;(3)对每一像对Descriptor进行匹配,并使用RANSAC算法进行粗差剔除,消除误匹配;(4)根据计算机多目视觉原理,将各像对匹配的同名像点连接统一起来,在逐次平差迭代过程中,剔除粗差,估算出视觉场景中相机和由匹配点形成的稀疏点云的相对位置;(5)结合相机的GPS和像控点的位置坐标,通过Damped Least-Squares(DLS)算法来获取相机和稀疏点云的真实空间位置。
2三维模型构建
后期影像处理基于POS数据进行,经过一系列的处理后,得到研究区的三维模型[4]。处理流程见图6。
21原始数据的预处理
由于无人机类别及用途存在差异, 无人机所获取的影像
POS信息的文件格式也有所区别。首先要将POS数据格式按照处理软件的要求进行修改,使其能够顺利地导入到工程当中。将数据格式依次修改为纬度、经度、海拔高度、航向、俯仰、横滚。
22导入影像
在导入之前,检查影像的质量,删除模糊、变形、色彩异常的影像,提高数据的精度。本次拍摄的区域较大,获取的影像数量较多,分区块依次单独进行处理,对每一个块逐一进行照片对齐、点云提取和立体模型的建立,最后再进行合并、提取纹理。分区块进行处理的好处在于,既可以充分利用计算机的性能特点,还可以提高影像数据处理的效率。需要注意的是,导入的影像必须是依照航线且连续的影像,与POS数据一一对应的数据,中间不能有遗漏。
23数据定向、点云提取
Agisoft photoscan根据空中三角测量的基本原理,根据多目视觉影像三维模型重建技术,自动解算出影像的坐标、姿态等信息,同时自动完成影像匹配、内定向、相对定向及绝对定向等过程,处理过程中不再需要进行人工干预。后期处理所需要的基本数据是影像数据、POS数据和地面控制点数据,影像的拍摄姿态与位置是由无人机在飞行过程中根据航线的设计和飞行的姿态来决定。
24立体建模
利用Agisoft photoscan從无人机航拍的原始影像数据和位置信息提取带有坐标信息的点云数据,可以快速重新构建任务目标的三维模型,即线、面、体、空间等各种数据,还原任务目标真实的形态特性。
25模型赋予纹理
模型构建完成后,需要将模型赋予材质、着色、纹理,Agisoft photoscan软件对于纹理的生成具有5种不同的模式,包括通用、正射影像、自适应正射影像、球形、单一相机。根据研究区特点采用适合研究区域的自适应正射影像模式,以达到符合实际的效果,保证质量。
26成果输出
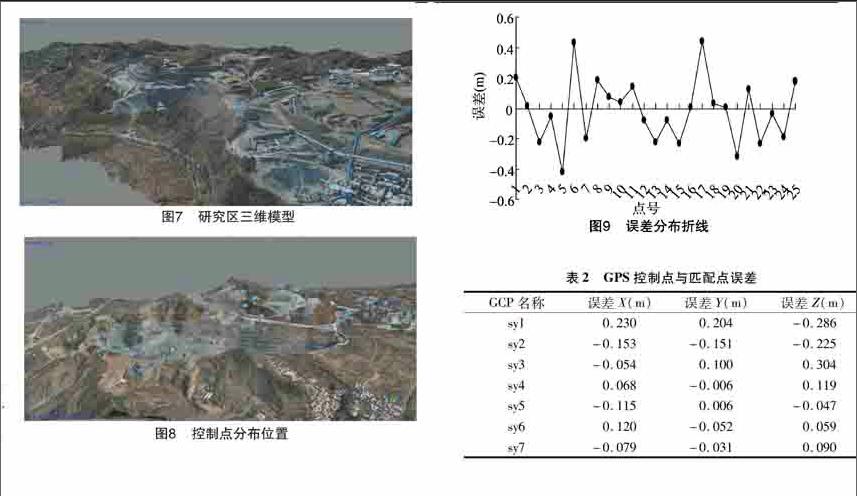
完成上述步骤后,就可以根据实际的需要将数字高程模型(DEM)、数字正射影像(DOM)、数字表面模型(DSM)导出,数字高程模型(DEM)即地形表面形态的数字化表达,它是用一组有序数值阵列形式表示地面高程的一种实体地面模型。数字正射影像(DOM)是对航空(或航天)相片进行数字微分纠正和镶嵌,按一定图幅范围裁剪生成的数字正射影像集。它是同时具有地图几何精度和影像特征的图像。数字表面模型(DSM)指物体表面形态以数字表达的集合。其中DEM必须是高程信息,是地表的模拟,DSM可以是地物表面的模拟,包括植被表面、房屋的表面,对DSM进行加工,去掉房屋、植被等信息,可以形成DEM。成果输出时,根据需求调整像元大小、投影坐标的类型,选择分幅图或整幅图输出。输出的格式常用为TIFF/GeoTIFF(tif)格式,也可导出KML文件,在google earth上打开,数字地表模型(DSM)也可导出为PDF或3DS等多种格式。三维模型见图7。
三维模型的精度决定了其可以满足的不同应用需求,为检验软件生成的三维模型,在实地采集了32个控制点,其中7个作为匹配点,对三维模型进行匹配,将控制点输入软件,坐标为wgs84,匹配模型见图8,导入的GPS点与软件匹配后的点进行比较,计算得到Z值误差数据(表2)。
从图9可以看出,误差总体控制在05 m左右,由于受实际条件的限制,以及天气原因的影响,基本上达到了预期的效果,与实际外业测量的真实坐标差距不是很大,因此构建的三维模型具有较高的精度,可以满足实际需求[5]。
3结论
本研究以废弃矿山为例,通过无人机获取的原始数据,运用Agisoft PhotoScan软件建立了相应的三维模型,实现了废弃矿山的精准测量,试验结果表明,基于Agisoft PhotoScan可以快速得到研究区的三维模型,并结合精度检验,可以满足相应的需求,为废弃矿山的地貌精准测量提供了帮助,相比与传统的三维建模方式缩短了时间,降低了成本,具有更好的应用前景[6-7]。
同时需要注意GCP点应布置在高对比度、可清楚地确定出中心位置的目标。这样才能提高影像坐标和空间坐标的匹配度与可靠性。实际实施中受一些客观条件的限制未能将GCP点做到最优化。下一步需要优化GCP点位置,从而提高三维模型的精度[8-10]。
今后将研究局部微地貌的表达,地形的缓陡程度,将三维数据与实地数据进行对比分析,进一步验证该方法的可行性与快捷性。
参考文献:
王俊强,韩宏强,孙建霖 基于无人机低空摄影高分辨率三维地形景观的实现[J] 测绘技术装备,2013(4):10-13
王钧超 矿山环境评价方法综述与治理经验探讨[J] 中国矿业,2014(增刊1):103-105
[3]王来贵,潘一山,赵娜 废弃矿山的安全与环境灾害问题及其系统科学研究方法[J] 渤海大学学报(自然科学版),2007,28(2):97-101
[4]李秀全,陈竹安,张立亭 非量测相机影像三维模型构建及精度检验[J] 测绘科学,2016,41(6):144-147
[5]李秀全,陈竹安,张立亭 基于Agisoft PhotoScan的无人机影像快速拼接在新农村规划中的应用[J] 湖北农业科学,2016,55(3):743-745
[6]黎富忠 无人机航拍技术在三维建模上的应用[J] 广西水利水电,2016(4):21-23
[7]王鹤,刘军,王秋玲 利用无人机影像进行滑坡地形三维重建[J] 测绘与空间地理信息,2015(12):68-71
[8]李文慧,杨斌,黄永璘,等 无人机遥感在三维地形建模中的应用初探[J] 气象研究与应用,2008,29(4):38-41
[9]魏占玉,Ramon A,何宏林,等 基于SfM方法的高密度点云数据生成及精度分析[J] 地震地质,2015,37(2):636-648
[10]赵云景,龚绪才,杜文俊,等 PhotoScan Pro软件在无人机应急航摄中的应用[J] 国土资源遥感,2015,27(4):179-182