自主导航农业车辆全景视觉光线的自适应方法研究
2017-10-27李盛辉周俊姬长英
李盛辉 周俊 姬长英


摘要:为解决自主导航农业车辆在实际野外作业中不同环境光线对全景视觉成像质量的影响问题,提高自主导航的准确性和可靠性,提出全景视觉光线自适应方法。首先,通过数字成像原理分析、成像曝光控制、成像质量评价,研究视觉成像系统;其次,通过相机响应函数求取、数据匹配与更新、光线自适应曝光时间调整,实现全景视觉光线自适应算法的具体过程。结果表明,改进的光线自适应算法,在正常光线、较强光线、较弱光线3种情况下,均能明显提高全景视觉图像的成像质量;相较于未经改进的原始算法,在光线较亮情况下改进的光线自适应算法,图像平均二维信息熵提高471%,平均梯度值提高609%;在光线较暗情况下,改进的光线自适应算法,图像平均二维信息熵提高 303%,平均梯度值提高764%;在不同光线情况下,改进的光线自适应算法,单次平均耗时036 s,相较于传统多曝光处理算法,速度平均加快755%。
关键词:全景视觉;农业车辆;光线自适应;成像曝光控制;成像质量评价
中图分类号: S229文献标志码:
文章编号:1002-1302(2017)16-0177-08
收稿日期:2016-11-20
基金项目:江苏省高校自然科学研究项目(编号:15KJD210002);江苏省高校“青蓝工程”项目。
作者简介:李盛辉(1984—),男,浙江舟山人,博士,讲师,主要从事农业机器人视觉和导航技术研究。E-mail:lshhui2006@163com。
由于视觉系统能获得较为细致的环境信息,同时更接近“人眼”的特性,视觉技术在国内外已成为农业车辆自主导航的关键与热点研究领域,并取得了一定的研究成果[1-6]。而如何解决光线对成像的影响,是视觉系统的难点问题,特别是在野外农业作业环境下,由于光线情况较为复杂,为提高成像质量,更好地实现通过多目全景视觉完成农业车辆自主导航,提高导航精度,必须解决系统环境光线自适应问题。
若在环境光线过亮的情况下,视觉系统会由于曝光量过大,使成像结果偏白,甚至全白;若在环境光线过暗的情况下,视觉系统则会由于曝光量过小,使成像结果变暗,甚至全黑。为解决此问题,国内外许多专家学者对此进行了研究。求取相机的响应函数,是分析曝光量与图像成像关系的基础问题,北京理工大学裘溯等通过主成分分析(PCA)算法提取最大特征向量,实现了对相机响应函数的求取。北京大学章卫祥等通过对迭代结束条件的改进,利用不同光线环境下的多张不同曝光度图像得到相机响应函数[8]。在光线较弱的低照度环境中,如何提高成像质量是研究难点。哈尔滨工业大学遆晓光等通过暗通道先验方法对低照度图像进行增强[9]。清华大学禹晶等利用颜色恒常性的特点,增强了低照度下图像的视见度[10]。洛桑联邦理工学院的Meylan等采用直方图改进和小波变换算法,对低照度下的图像进行增强[11]。麻省理工学院Durand等提出了快速的Bilateral Filter算法,以实现不同环境光线下高动态范围的图像显示[12]。同时,犹他大学的Reinhard等也对该领域进行了研究。米兰大学的Rizzi等研究了高动态范围图像的眩光抑制[14]。
从目前的研究成果看,大多采用多次曝光的方式得到多张图片,通过相关算法对图片进行增强处理,主要应用于较弱光线环境和对实时性要求不高的情况。但由于农业车辆工作在自然的野外環境,室外不确定的光线条件会严重影响农业车辆视觉自主导航功能的实现。而本研究采用的全景视觉系统,虽然能获取更完整的周围环境图像信息,但由于是通过不同方向的多目相机拼接实现全景图像,因此就算处于同一环境光线下,不同方向的光线也存在较大不同,因此对环境光线影响更为敏感,同时自主导航需要较高的实时性。因此如何研究实现一种实时性较高的多目全景视觉光线自适应方法,直接影响自主导航农业车辆的可靠运行,具有重要的研究价值和意义。
1视觉成像系统
视觉成像系统主要分为传统胶片成像和数字成像这2种方式,随着电子信息技术的高速发展和机器人视觉技术的广泛应用,数字成像技术由于在图像信息存储、信息处理和信息传输等方面的便捷性与高效性,已成为主流发展趋势。
11数字成像原理
本研究中多目全景视觉系统的各相机采用光感应式电荷耦合器件(CCD)传感器,其成像过程如图1所示。环境场景光照度(L),通过相机镜头得到进入相机的光照度(E),通过快门控制的曝光时间(T),就能得到曝光量(X),通过CCD传感器输出电压量(模拟),经过A/D转换得到相应的数字量,最后通过重映射过程得到相机输出数字量(Z)。
环境场景光照度(L)与进入相机的光照度(E)的关系可用公式(1)表示:
[JZ(]E=L×[SX(]π4[SX)]×([SX(]df[SX)])2×cos4θ。[JZ)][JY](1)
式中:d为相机光圈直径,f为相机镜头焦距,θ为光线与光轴的夹角。其中相机光圈值F的定义如公式(2)所示:
[FK(W5][TPLSH1tif][FK)]
F=f/d。[JZ)][JY](2)
将公式(2)代入公式(1),则可得到公式(3):
E=L×[SX(]π4[SX)]×([SX(]1F[SX)])2×cos4θ。[JZ)][JY](3)
12成像曝光控制
曝光量(X)由进入相机的入射光照度(E)和相机曝光时间(T)这2个因素决定,其关系如公式(4)所示:
X=E×T。[JZ)][JY](4)
图像亮度与曝光时间,在k时刻的状态表示为
Bk=f(Tk,Ek,Gk,Fk)。[JZ)][JY](5)
式中:Bk为k时刻图像亮度,Tk为k时刻相机曝光时间,Ek为k时刻环境的光照度,Gk为k时刻相机放大电路增益,Fk为k时刻相机光圈值,f为相机响应函数,则在k+1时刻的状态表示为
Bk+1=f(Tk+1,Ek+1,Gk+1,Fk+1)。[JZ)][JY](6)
由于光照度(E)取决于周围环境因素,相机放大电路增益(G)由相机内部电路结构决定,改变其值将会影响图像的信噪比,故本研究优先选择改变相机曝光时间(T)和相机光圈值(F)来实现对图像亮度的控制。
2成像质量评价
成像质量是视觉成像系统的核心问题,同时直接关系到采用视觉技术进行自主导航的可靠性。国内外对成像质量评价参数的研究,主要分为主观与客观两大类[15-19]。
主观评价方法是通过图像观察者的主观感受来对图像质量进行评价打分,虽然该方法评价效果较好,但由于需要大量的人力成本且无法用数学方法进行建模描述,故无法实际应用于图像处理过程。客观评价方法是通过模型计算得到相关参数值,对图像质量进行评价。本研究采用全景视觉的自主导航农业车辆,由于须对视觉图像信息进行直接处理,得到相关导航信息,需要较高的算法精度,故选取客观评价方法。
客观评价方法,如峰值信噪比(PSNR)、均方根误差(RMSE)、结构相似度(SSIM)等大多数方法都须要依赖参考图像,但是在视觉自主导航系统实际应用中,提供无失真的原始图像(参考图像)较难实现,同时该类方法由于需要与参考图像进行比较,较难满足自主导航系统对视觉图像处理较高的实时性要求,故本研究选取与参考图像无关的图像信息熵和图像平均梯度对视觉成像质量进行评价。
信息熵用于描述信源信息量的情况,其表达为
H[p(x1),p(x2),…,p(xn)]=-∑[DD(]ni=1[DD)]p(xi)lgp(xi)。[JZ)][JY](7)
式中:p(xi)表示xi事件发生概率,则p(xi)满足表达式(8):
∑[DD(]ni=1[DD)]p(xi)=1。[JZ)][JY](8)
将信息熵用于描述图像信息量情况,则将公式(7)变化为公式(9):
H1=-∑[DD(]ni=1[DD)]p(i)lg p(i)。[JZ)][JY](9)
式中:H1为图像一维信息熵,表示图像包含信息量的大小,HX越大,说明图像所含信息量越大,图像质量越好,反之,HX越小,说明图像所含信息量较小,图像质量越差;p(i)表示i灰度值像素出现的概率,满足公式(10):
∑[DD(]ni=1[DD)]p(i)=1。[JZ)][JY](10)
但图像一维信息熵仅表示图像像素灰度分布特性,未能反映其空间域特性,故本研究采用图像二维信息熵作为成像质量评价参数,其表达式为
({]pij=f(i,j)/(L×W)H2=-∑[DD(]255i=0[DD)] ∑[DD(]255j=0[DD)]pij lg pij11)
式中:L、W分别表示图像的行、列像素点数量,则L×W为图像分辨率,i表示像素P的灰度值,j表示像素P的领域灰度均值,f(i,j)表示有序对(i,j)出现的次数。图像二维信息熵能更好地通过计算图像所含信息量大小来评价成像质量。
为更全面地评价本研究多目全景视觉成像系统所生成的彩色图像,分别通过计算图像中的红绿蓝(RGB)分量的二维信息熵,然后求其平均值,表达式为
HM/2=[SX(]13[SX)](HR/2+HG/2+HB/2)。[JZ)][JY](12)
式中:HR/2、HG/2、HB/2分别为图像R、G、B分量二维信息熵;HM/2为各分量平均二维信息熵。
本研究通过图像的平均梯度值来衡量图像的清晰程度,平均梯度值越大,图像越清晰,其成像质量就越好,表达式为
▽G[TX-]=[SX(]1(L-1)(W-1)[SX)]∑[DD(]L-1i=0[DD)] ∑[DD(]W-1j=0[DD)][KF(][SX(]ΔI2x+ΔI2y213)
式中:ΔIx=I(i,j)-I(i+1,j)为图像x方向差分,ΔIy=I(i,j)-I(i,j+1)为图像y方向差分,I(i,j)为图像i行j列的像素值。
3多目全景视觉光线自适应算法实现
本研究提出的多目全景视觉光線自适应算法,就是为提高在不同环境光线条件下,多目全景视觉系统的成像质量。
31算法总体流程
图2为多目全景视觉光线自适应算法的总体流程。首先,对设备进行初始化;其次,对周围环境光照度进行采集,并判断其是否在设定的正常光线范围内;再次,针对不在设定的正常光线范围内的情况,计算图像二维信息熵和图像平均梯度值,并相应地对数据库进行匹配更新;最后,根据匹配更新的数据,设置新的曝光时间。
32相机响应函数求取
相机的响应函数反映了相机成像过程中曝光量与输出量之间的映射关系,该函数通常是非线性函数[20-21]。准确求取标定相机响应函数,对相机成像系统的分析至关重要。
根据“11”节数字成像原理,其成像模型描述可用公式(14)表示:
Z=f(X)。[JZ)][JY](14)
式中:X为曝光量,Z为相机输出的数字量,f为相机的响应函数,根据公式(4),则公式(14)可表示为
Zij=f(EiΔtj)。[JZ)][JY](15)
式中:Δtj为j次曝光时间,Ei为i像素点的入射光照度,Zij为第j次曝光时间条件下i像素点的相机输出数字量。假设f为单调函数,则公式(15)可表示为
f-1(Zij)=EiΔtj。[JZ)][JY](16)
对公式(16)两边同时取自然对数,则得到公式(17):
lnf-1(Zij)=lnEi+lnΔtj。[JZ)][JY](17)
为简化表达式,令公式(17)中lnf-1=g,则公式(17)可表示为
g(Zij)=lnEi+lnΔtj。[JZ)][JY](18)
公式(18)中假设g()为平滑单调函数。
O=∑[DD(]Ni=1[DD)] ∑[DD(]Pj=1[DD)][g(Zij)-lnEi-lnΔtj]2+λ∑[DD(]Zmax-1z=Zmin+1[DD)]g″(z)2。[JZ)][JY](19)
式中:Zmin为相机输出最小量,Zmax为相机输出最大量,公式(19)中第2项为g(z)二阶导数的平方和,g″(z)表达式为
g″(z)=g(z-1)-2g(z)+g(z+1)。[JZ)][JY](20)
公式(19)又可表示为
O=∑[DD(]Ni=1[DD)] ∑[DD(]Pj=1[DD)]{w(Zij)[g(Zij)-lnEi-lnΔtj]}2+λ∑[DD(]Zmax-1z=Zmin+1[DD)][w(z)g″(z)]2。[JY](21)
其中w(z)定义为
w(z)=[JB({]z-Zmin[KG3]当 z≤[SX(]12[SX)](Zmin+Zmax)时Zmax-z[KG3]当z>[SX(]12(Zmin+Zmax)时[JB)]。(22)
根据公式(18)得到
lnEi=g(Zij)-lnΔtj。
(23)结合公式(21)得到
[JZ(]lnEi=[SX(]∑[DD(]Pj=1[DD)]w(Zij)[g(Zij)-lnΔtj]∑[DD(]Pj=1[DD)]w(Zij)[SX)]。[JZ)][JY](24)
33数据匹配与更新
本研究中的多目全景视觉光线自适应算法,其目的为通过获取光照度的数据,调节曝光时间,进而控制曝光量,提高图像成像质量。根据公式(16),相机响应函数反映了相机输出量与曝光量之间的关系,其中曝光量为曝光强度与曝光时间的乘积,故可得曝光时间与相机输出量之间的关系。仅通过求取相机响应函数虽能较准确地进行分析,但需要大量的计算和拟合工作,影响实时性。为更好地解决此问题,本研究建立了光照度与曝光时间的关系数据库,在數据匹配时优先采用数据查表方式,如在数据库中未能获取其关系时再采用相机响应函数的方式进行计算,其后根据传感采集端回传的相关数据对关系数据库进行更新,该方法能有效地提高匹配运算速度。考虑到硬件模块安装与数据传输的便捷性,安装于相机端的光照度采集硬件模块通过数据无线传输将光照度数据传输回来。
本研究数据库设计存储的关系量为T、Estd、Emin、Emax 4个,其中T为对应光照度Estd时的曝光时间,考虑到农业车辆在野外环境下光照度是时刻变化的,为避免频繁调整曝光时间,影响算法实时性和图像成像质量,数据库中设定了2个区间参数Emin和Emax,光照度在[Emin,Emax]区间范围时,根据“34”节算法判定依据仍有可能不改变曝光时间T,正常运行原有程序,能有效地提高算法实时性。同时减少数据库更新记录次数,减小数据库,从而加快数据索引匹配速度。
34光线自适应曝光时间调整
根据采集的环境光照度和“33”节建立的关系数据库,则能实现光线自适应曝光时间调整,具体步骤如下:
(1)通过安装于多目全景视觉系统各相机方向的光照度采集硬件模块,在t时刻,获取各相机方向的光照度Eit,其中 i=1,…,6。
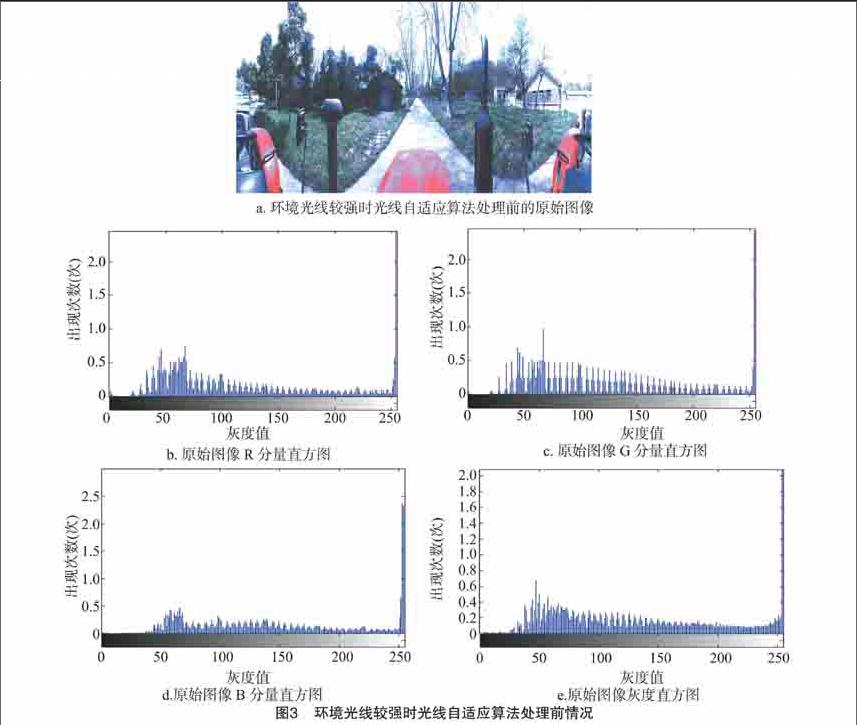
(2)若Estd-δ≤Eit≤Estd+δ,则表明光照度在正常范围区间,执行步骤(6);若Emin≤Eit (3)根据公式(11)计算t时刻图像的二维信息熵Hit,若Hit≥Hs,则表明图像二维信息熵不小于设定的正常二维信息熵,图像质量较好,执行步骤(6);若Hit (4)根据公式(13),计算图像的平均梯度值▽G[TX-]it,若▽G[TX-]it≥Gs,则表明图像的平均梯度值不小于设定的正常平均梯度值,图像质量较好,执行步骤(6);反之▽G[TX-]it (5)通过数据匹配重新得到曝光时间Tit、Estd、Emin、Emax。 [JZ(]Tit=Yi(Eit,Hit,▽G[TX-]it)。[JZ)][JY](25) (6)生成光线自适应的全景视觉图像,判断程序是否完成,若未完成,则t=t+1,继续执行步骤(1);若完成,则结束运行。 4系统整体试验数据及分析 试验以加装全球定位系统(GPS)和多目全景视觉系统(Ladybug3)并经过电控液压转向改造的东方红SG250型拖拉机为自主导航农业车辆试验平台进行试验。 通过设计进行光线自适应算法成像试验、主要成像质量指标测试试验和算法实时性测试试验,来有效地检验本研究中提出的多目全景视觉光线自适应系统的实际运行效果。 41光线自适应算法成像试验 农业车辆在实际野外工作环境中,光照度会由于时间、季节、天气等因素有较大变化,对视觉自主导航的可靠运行造成影响。而本研究中的多目全景视觉系统,由于采用多方向的相机图像拼接来得到全景视觉图像,则光照度变化会直接影响全景视觉图像拼接的成功率,从而影响自主导航功能的实现。试验分别选取光线正常、光线较强、光线较弱这3种情况进行测试。 如图3-a所示,在光线较强情况下,由于未经改进的原始处理算法得到的全景视觉图像存在过曝光的情况,图像质量较差,有较多图像信息丢失,图3-b、3-c、3-d、3-e分别为图像R分量、G分量、B分量、灰度的直方图,通过分析可以反映图像存在较多高亮度值区域,而低亮度值区域较少。图4-a为采用本研究提出的光线自适应算法进行处理后所得到的全景视觉图像,其成像质量明显得到改善,图4-b、4-c、4-d、4-e分别为图像R分量、G分量、B分量、灰度的直方图,其高亮度值区域减少,亮度分布得到改善。
如图5-a所示,在光线较弱情况下,由于图像存在欠曝光的情况,未经改进的原始处理算法得到的全景视觉图像质量较差,从而丢失较多图像信息。图5-b、5-c、5-d、5-e分别为图像R分量、G分量、B分量、灰度的直方图,通过分析可以反映图像集中于低亮度值区域,高亮度值区域接近0。图6-a为采用本研究提出的光线自适应算法进行处理后得到的全景视觉图像,其成像质量明显得到改善,图6-b、6-c、6-d、6-e分别为图像R分量、G分量、B分量、灰度的直方图,它的低亮度值区域减少,有效地改善了亮度分布区域。
由图7-a可见,由于光线情况较正常,未经改进的原始处理算法得到的全景视觉图像,虽然总体质量也较良好,但通过图7-b、7-c、7-d、7-e与图8-b、8-c、8-d、8-e对应直方图进行比较可以发现,采用本研究提出的光线自适应算法处理后所得的全景视觉图像,直方图分布更接近中心均衡分布,成像质量较好,得到的全景视觉图像如图8-a所示。
42主要成像质量指标测试试验
平均二维信息熵用来描述图像所含信息量的大小,平均梯度值用来描述图像的清晰程度。“41”节试验结果表明,本研究提出的改进光线自适应算法,能在不同光线条件下,有效地提高成像质量。为更系统地测试采用本研究改进的光线自适应算法进行处理的实际图像的成像质量,在不同光线情况下, 通过分组进行多次试验,由于像素是图像的重要参数,
故在每组中对不同像素的图像计算分析其平均二维信息熵、平均梯度值、单次平均耗时。
将试验分为A、B、C组,分别在光线较亮、光线正常、光线较暗的环境条件下进行测试。其中A1、B1、C1组采用320×240像素图像进行测试,A2、B2、C2组采用512×256像素图像进行测试,A3、B3、C3组采用1 024×512像素图像进行测试。为较有效地分析试验数据,每组各进行50次独立试验。
选取在1 024×512相同像素图像情况下进行分析,由表1可见,在光线较亮时,A3组中采用未经改进的原始算法处理,其图像平均二维信息熵为629,平均梯度值为581,而采用本研究改进的光线自适应算法处理后,其图像二維信息熵为922,平均梯度值为931。在光线较暗时,C3组中采用未经改进的原始算法处理,其图像平均二维信息熵为 732,平均梯度值为472,而采用本研究改进的光线自适应算法处理后,其图像二维信息熵为958,平均梯度值为813。相较于未经改进的原始处理算法,本研究提出的光线自适应处理算法,在光线较亮和较暗情况下的图像平均二维信息熵分别提高466%、309%,平均梯度值分别提高602%、722%。在光线正常情况下,由于光线因素对成像影响较小,故采用未经的原始算法虽然较本研究改进的光线自适应算法成像质量略差,但差距不明显。相较于未经改进的原始算法,由于本研究改进的光线自适应处理算法增加了相关处理步骤,在处理时间上会略有增加,但增加幅度较小,能满足系统实时性需要。
综合各组试验数据,在光线较亮情况下,未经改进的原始算法的图像平均二维信息熵为624,平均梯度值为574;本研究改进的光线自适应算法的图像平均二维信息熵为917,平均梯度值为924,相较于未经改进的原始算法,图像平均二维信息熵提高471%,平均梯度值提高609%。
在光线较暗情况下,未经改进的原始算法的图像平均二维信息熵为717,平均梯度值为458;本研究改进的光线自适应算法的图像平均二维信息熵为934,平均梯度值为 808,相较于未经改进的原始算法,图像平均二维信息熵提高303%,平均梯度值提高764%。
43算法实时性测试试验
虽然随着像素的提高,图像成像质量也随之提高,但处理时间也会随之增加,由于本研究中多目全景视觉系统的目的是为实现农业车辆的自主导航,故必须考虑实时性,实际应用中通常设置512×256像素图像进行处理。试验选取512×256像素图像,在较亮、正常、较暗3种光线情况下进行测试。
由表2可见,选取试验1进行具体分析,传统多曝光处理算法的图像平均二维信息熵为932,平均梯度值为 942,单次平均耗时为169 s,本研究改进的光线自适应算法的图像平均二维信息熵为919,平均梯度值为929,单次平均耗时为036 s,速度加快787%。
综合各组试验数据,在不同光线情况下,传统多曝光处理算法的图像平均二维信息熵为957,平均梯度值为942,单次平均耗时147 s;本研究改进的光线自适应算法的图像平均二维信息熵为946,平均梯度值为931,单次平均耗时 036 s。由于传统多曝光处理算法采用多次曝光得到多张图像进行算法处理, 故在成像质量上稍好于本研究中改进的光线自适应算法,但同时也造成算法运算耗时较长,不适合应用于对实时性要求较高的视觉导航。相较于传统多曝光处理算法,本研究改进的光线自适应算法在成像质量差别不大的情况下,速度平均加快了755%。
5结论
(1)本研究提出的光线自适应算法,在正常、较强、较弱的不同光线情况下,所得到的全景视觉图像,其成像质量明显得到提高。(2)在光线较亮情况下,本研究改进的光线自适应算法,相较于未经改进的原始算法,图像平均二维信息熵提高471%,平均梯度值提高609%。在光线较暗情况下,本研究改进的光线自适应算法,相较于未经改进的原始算法,图像平均二维信息熵提高303%,平均梯度值提高764%。(3)在不同光线情况下,本研究改进的光线自适应算法单次平均耗时036 s。相较于传统多曝光处理算法,速度平均加快 755%,能较好地满足农业车辆全景视觉自主导航的较高实时性要求。
参考文献:
姬长英,周俊 农业机械导航技术发展分析[J] 农业机械学报,2014,45(9):44-54
李进,陈无畏 基于自适应导航参数的智能车辆视觉导航[J] 农业机械学报,2012,43(6):19-24
[3]赵博,王猛,毛恩荣,等 农业车辆视覺实际导航环境识别与分类[J] 农业机械学报,2009,40(7):166-170
[4]Bergerman M,Maeta S M,Zhang J,et alRobot farmers: autonomous orchard vehicles help tree fruit production[J] IEEE Robotics and Automation Magazine,2015,22(1):54-63
[5]Cariou C,Lenain R,Thuilot B,et alAutomatic guidance of a four-wheel-steering mobile robot for accurate field operations[J] Journal of Field Robotics,2009,26(6/7):504-518
[6]Asif M,Amir S,Israr A,et alA vision system for autonomous weed detection robot [J] International Journal of Computer and Electrical Engineering,2010,2(3):486-491
[7]裘溯,金伟其 基于PCA的相机响应函数特征化方法研究[J] 北京理工大学学报,2015,35(10):1085-1089
[8]章卫祥,周秉锋 一个稳健的用于HDR图像的相机响应函数标定算法[J] 计算机学报,2006,29(4):658-663
[9]遆晓光,曲悠杨 一种改进的色彩保持低照度图像增强方法[J] 哈尔滨工业大学学报,2014,46(3):1-7
[10]禹晶,李大鹏,廖庆敏 基于颜色恒常性的低照度图像视见度增强[J] 自动化学报,2011,37(8):923-931
[11]Meylan L,Susstrunk SHigh dynamic range image rendering with a retinex-based adaptive filter [J] IEEE Transactions on Image Processing,2006,15(9):2820-2830
[12]Durand F,Dorsey JFast bilateral filtering for the display of high-dynamic-range images[J] ACM Transactions on Graphics,2002,21(3):257-266
[13]Reinhard E,Stark M,Shirley P,et alPhotographic tone reproduction for digital images[J] ACM Transactions on Graphics,2002,21(3):267-276[HJ17mm]
[14]Rizzi A,McCann J JGlare‐limited appearances in HDR images [J] Journal of the Society for Information Display,2009,17(1):3-12
[15]蒋刚毅,黄大江,王旭,等 图像质量评价方法研究进展[J] 电子与信息学报,2010,32(1):219-226
[16]王志明 无参考图像质量评价综述[J] 自动化学报,2015,41(6):1062-1079
[17]Eskicioglu A M,Fisher P SImage quality measures and their performance[J] IEEE Transactions on Communications,1995,43(12):2959-2965
[18]Zhang Y JA survey on evaluation methods for image segmentation[J] Pattern Recognition,1996,29(8):1335-1346
[19]Veeramallu B,Lavanya S C,Sahitya SSurvey on an image quality assessment metric based on early vision features[J] IEEE Transactions on Image Process,2013,2(6):447-449
[20]Debevec P E,Malik JRecovering high dynamic range radiance maps from photographs[C] Proceedings of ACM SIGGRAPH,1997:369-378
[21]Nayar S K,Mitsunaga THigh dynamic range imaging: spatially varying pixel exposures[C] Proceedings of IEEE Conference on Computer Vision and Pattern Recognition,2000:472-479
