潜艇舱段模型机械声源定量识别试验研究
2017-10-25于树华时胜国时洁韩闯
于树华,时胜国,2,时洁,2,韩闯
潜艇舱段模型机械声源定量识别试验研究
于树华1,时胜国1,2,时洁1,2,韩闯3
(1.哈尔滨工程大学水声工程学院,黑龙江哈尔滨150001;2. 哈尔滨工程大学水声技术重点实验室,黑龙江哈尔滨150001;3. 哈尔滨理工大学测控技术与通信工程学院,黑龙江哈尔滨150080)
针对潜艇机械声源的分离量化问题,采用了将偏相干输出谱分析与层次分析相结合的层次诊断方法。建立了复杂噪声源分离量化的递阶层次结构,并通过两两比较构造判断矩阵,通过各层权重组合处理得到各噪声源的分离量化结果;为了验证该方法在实际工程应用中的有效性,开展了潜艇舱段模型机械声源定量识别水池试验研究,采用层次诊断分析方法实现了机械声源贡献分离,并通过模型偏心电机、激振器单机和组合单机试验工况考核了机械声源分离精度。经舱段模型试验验证,采用层次诊断方法得到的机械声源贡献分离偏差小于3 dB(50 Hz~1 kHz)。舱段模型试验验证了层次诊断方法在机械声源定量识别中的可行性,并为该方法的工程实用性提供支撑。
噪声源识别;层次诊断;偏相干分析;舱段模型试验
0 引言
从声学的角度看,潜艇是一个复杂的噪声源分布体,其水下噪声主要包括机械噪声、螺旋桨噪声和水动力噪声。在中低速巡航状态下,潜艇的主要噪声源是机械结构噪声[1]。控制并减小机械噪声是实现潜艇安静化的首要环节。为了有针对性地开展减振降噪工作,通过测量艇体振动信号及其水下辐射噪声对各噪声源贡献大小进行估计,从而识别出主要噪声源是一个关键的技术手段。为了解决这一难题,国内外学者进行了大量理论与试验研究并提出了许多应用于噪声源识别的方法[2-7]。然而,潜艇内部机电设备众多,且振动传递路径复杂,主要包括机械设备-支撑基座、机械设备-浮筏隔振装置以及管路传递等振动传递路径。上述原因导致了潜艇内部机电设备之间相互耦合严重,振动传递特性复杂,使得噪声源识别问题难以得到合理的解决。
本文将层次分析法[8]与相干输出谱分析、偏相干输出谱分析[9]相结合,采用层次诊断技术[10]对潜艇舱段模型机械声源进行定量识别。将潜艇层次诊断过程分为两个环节,分别为从艇内设备到壳体、再从壳体到声场评价点。在这两个环节中分别采用层次诊断技术将复杂的噪声源定量识别问题表示为有序的递阶层次结构,采用相干分析、偏相干分析在各特征线谱上或特征频带内对噪声源进行排序;并对两个环节的排序结果进行融合计算,得到艇内各机械设备对水声场评价点的贡献大小。
舱段模型试验是对潜艇机械噪声定量识别技术进行试验验证的重要途径。本文以潜艇舱段模型为研究对象,构建了舱段模型振动与水下辐射噪声试验测试系统,利用振动测量系统测量舱段模型内部偏心电机机脚、激振器激励壳体部位以及壳体结构的振动数据,利用近场水下辐射噪声测量系统以及远场单点声压水听器,分别测量模型壳体水下辐射噪声的近场和远场水下辐射噪声数据,以考核机械声源贡献分离测试分析方法的准确度,为实艇码头机械噪声源测试提供技术支撑。
1 基于层次诊断的噪声源识别方法
1.1 层次诊断基本原理
根据噪声源特点和层次诊断理论可建立具有四个层次的噪声源识别递阶层次结构,分别为:目标层、准则层、频率层和声源层。目标层是噪声源的主次顺序,用A表示;准则层为噪声源诊断信号处理方法(包括相干分析和偏相干分析),用B表示;频率层用F表示;声源层用C表示。噪声源层次诊断结构模型图如图1所示。
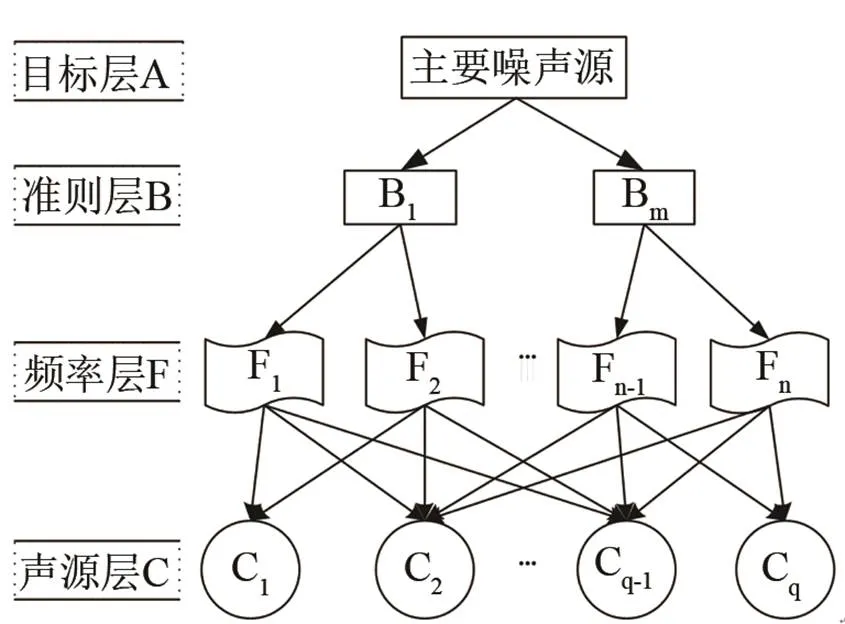
图1 噪声源层次诊断结构模型图
首先确定壳体结构强辐射部位,并选择壳体结构强辐射部位临近的若干壳体振动测点(层次诊断系统中间传递节点)作为层次诊断的内部振动源识别子系统的输出,同时也是层次诊断的外部机械声源识别子系统的输入。因此,壳体振动测点、偏心电机机脚和激振器激励点的振动测点(层次诊断系统的输入)、远场单点声压水听器(层次诊断系统输出)构成一个完整的层次诊断系统。
舱段模型机械声源贡献分离层次诊断方法信号处理流程示意图如图2所示。
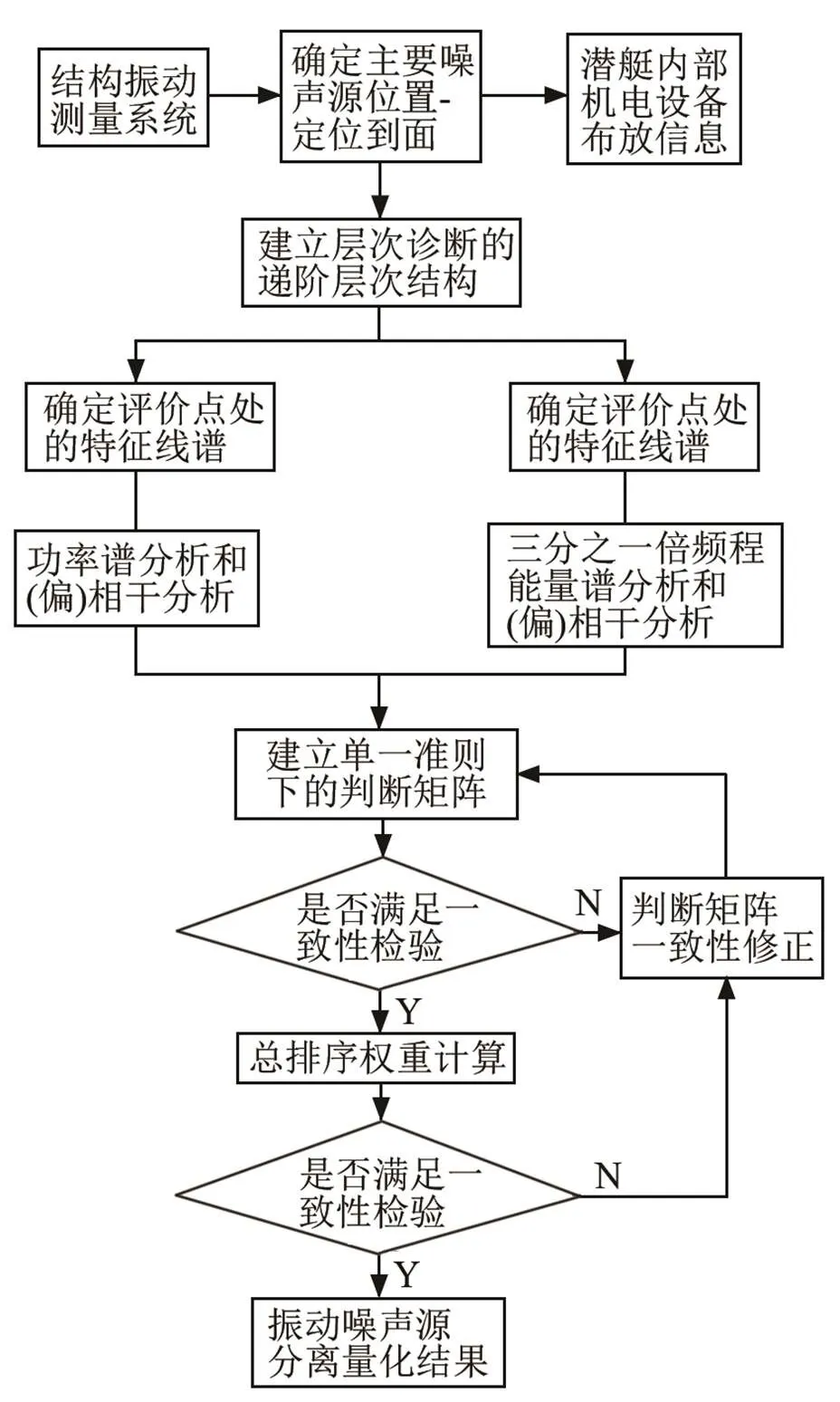
图2 噪声源层次诊断流程图
具体的贡献分离诊断步骤如下:
第一步,确定主要噪声源。将结构振动测量系统测得的振动数据与舱段模型内部机械设备布放信息进行综合分析,可以确定作为声源层元素的艇内机械设备和壳体强辐射部位;
第二步,选取分析准则。根据舱段模型机械声源定量识别的具体问题确定准则层的元素,包括特征线谱分析、特征频带能量分布分析和相干输出谱分析、偏相干输出谱分析;
第三步,选取分析频率或频带。对评价点处的信号在频域上进行分析,基于其频率结构完成对作为频率层元素的特征线谱和特征频带的提取;
第四步,构建判断矩阵。对机械结构振动信号在频域上进行分析处理,根据所分析信号的能量大小,以上一层次中某元素为准则建立表示与其相关的本层次中各元素之间相对重要程度的判断矩阵;
第五步,对判断矩阵一致性进行检验,并计算单一准则下各层元素权重;
第六步,把第五步中的各层权重计算结果进行组合处理,从而完成机械声源的定量识别。并进行总的判断一致性检验。
1.2 判断矩阵构建方法的改进[10]
层次诊断借助于合理的标度建立具有满意一致性的判断矩阵。在潜艇机械声源定量识别过程中,计算的是各机械声源对声场评价点的能量贡献比例,对测度对象采用信号处理手段得到的结果具有清晰的物理意义。为了使传统层次分析法中的标度可以应用于具有特定物理意义的问题,需要对其进行改进,从而可以反映被测对象具有的物理属性。


表1 层次诊断中标度系统的改进
2 舱段模型试验概况
为了验证层次诊断技术在水下大型结构机械声源定量识别中应用的可行性,在混响水池开展了潜艇舱段模型机械系统振动与水下辐射噪声测试试验研究。
考虑到实艇码头系泊的测试环境以及水池测试条件、舱段模型试验的可操作性,舱段模型全潜水下,布放深度为1.8 m;另外,考虑舱段模型内偏心电机布置在底部,因而将近场辐射噪声测量系统布放深度选取较深一些,布放深度为4.6 m,两者水平相距4 m;远场单点声压水听器布放深度也为4.6 m,与舱段模型水平相距8.5 m。舱段模型、组合阵列和单点声压水听器布放示意图如图3所示。
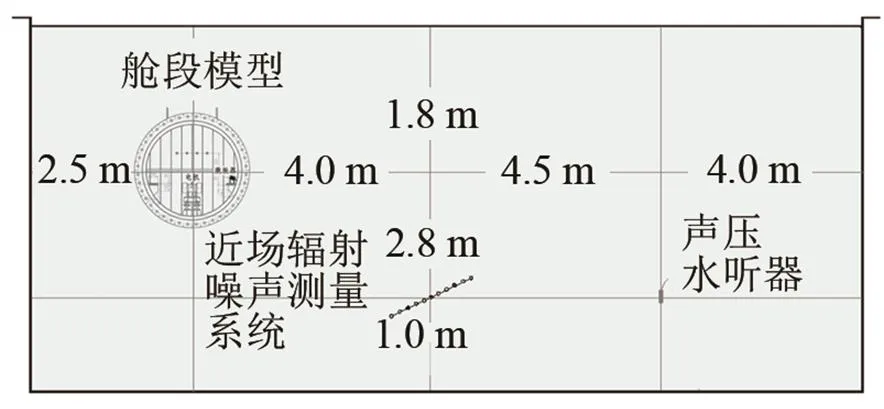
图 3 水池试验布放示意图
2.1 试验对象
试验对象是具有双层壳体结构的舱段模型,试验舱总长为2.87 m,主体双层壳舱段长为2.3 m,外径2 m,耐压壳直径为1.6 m,舱段模型实物如图4所示。舱段模型内部设置有位于船舯的小型浮筏基座及筏架(模拟小型辅机浮筏)和舷侧设置的舷侧浮筏基座(模拟大型整舱浮筏)。

图4 舱段模型
激励设备包括2台偏心电机和1台激振器。如图5所示,2台偏心电机安装在船舯小型浮筏基座及筏架上,激励浮筏基座引起舱段模型壳体结构振动并向外部辐射噪声。如图6所示,在舷侧浮筏基座上安装有1台激振器,激励壳体振动并向外辐射噪声。
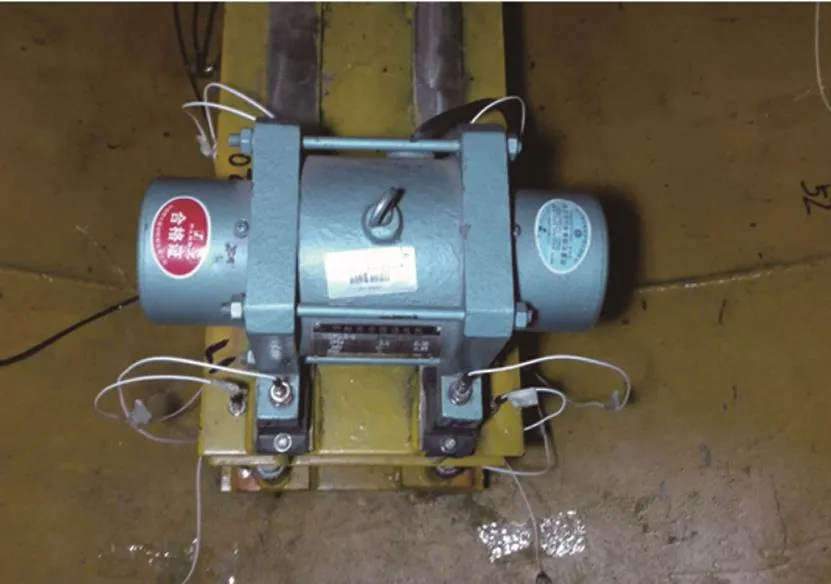
图5 偏心电机

图6 激振器
2.2 测试系统
舱段模型试验测试系统的硬件系统包括激励设备机脚、舱段模型结构振动测量系统,近场水下声辐射测量系统以及远场单点声压水听器。其中,结构振动测量系统主要用于偏心电机和激振器的激励振动特性以及壳体被激振动的空间分布特性测试,掌握激励设备的振动特性以及壳体主要声辐射部位;近场辐射噪声测量系统和远场单点噪声测量系统可以作为机械声源定量识别过程的声场评价点。结构振动测量系统包括54只振动加速度计,其中,偏心电机机脚4个振动测点,激振器机脚2个振动测点,壳体48个振动测点(4环×12个/环);近场辐射噪声测量系统由8只B&K8103型声压水听器和3只自行研制的三维矢量水听器组成;远场单点噪声测量系统为B&K8106型声压水听器。舱段模型机械声源定位与贡献分离综合试验测试系统共有75路声与振动测量信号。试验测试系统还包括振动信号调理器、程控滤波放大器、测量放大器、PULSE采集器和计算机。舱段模型一端设置两个船舱水密接插件,主要用于连接水密电缆,根据实验需要可分别传输振动测试信号和激振信号、动力电等。
按照舱段模型内安装设备对激励设备振动测点进行编号,偏心电机1为A(靠近水密门端),偏心电机2为B(远离水密门端);激振器为C。激励设备振动噪声测点布置及编号见表2。
舱段模型壳体的振动测点布置如图7所示,在壳体上共有48个振动测点。按照顺时针(从水密门端向舱内看)、从水密门端顺序对壳体振动测点进行编号,用字母E、F、G、H表示壳体不同截面的上振动测点;用数字1~12表示同一截面上的不同测点。
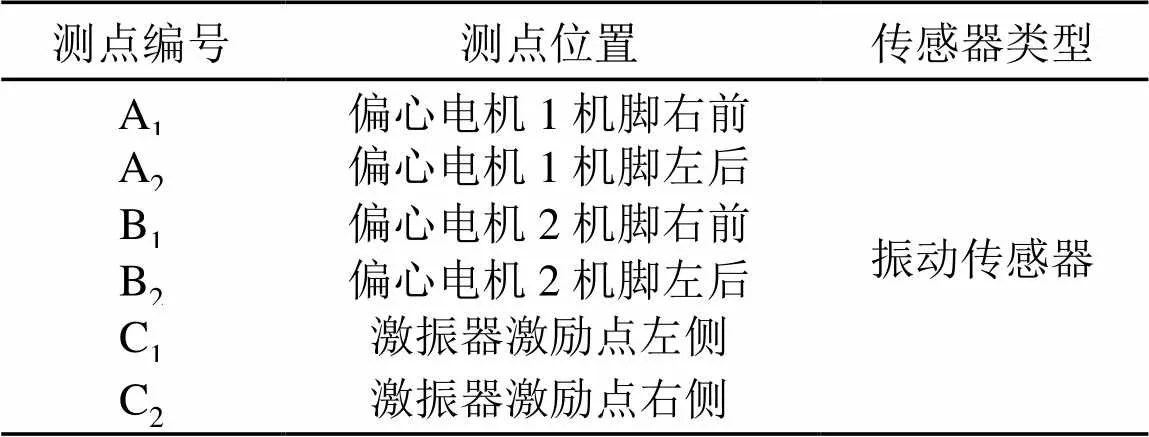
表2 激励设备振动测点
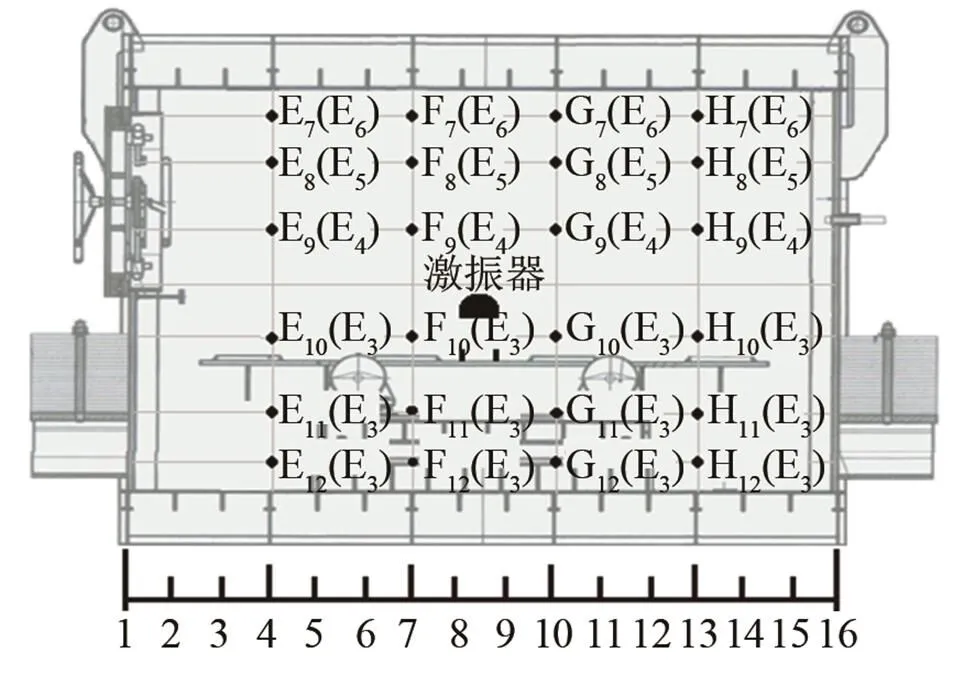
图7 壳体振动测点
2.3 试验工况
依托舱段模型分别开展激励设备单机和多机组合激励测试,具体试验工况如表3所示。开展电机1、电机2和激振器单机测试,获取电机1、电机2和激振器单独激励模型壳体时的水下辐射噪声数据,为后续采用分部运转法对机械声源定量识别进行正确性检验提供基准数据。多机组合激励测试包括电机1和激振器同时开启以及电机1、电机2和激振器同时开启两种方式,验证机械声源定量识别方法的有效性。
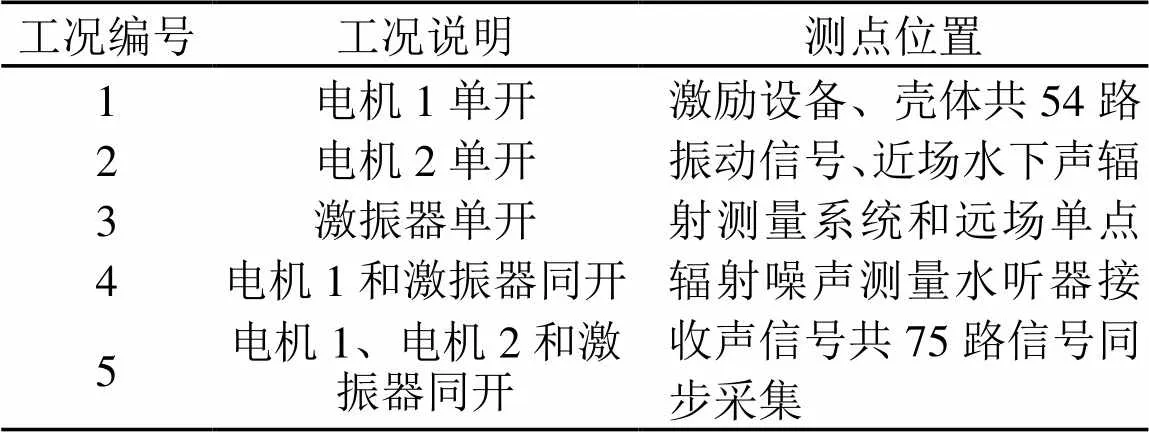
表3 试验工况
3 试验数据分析
基于舱段模型水下噪声测试平台的激励设备单机和多机组合测试结果,利用单机测试具有的频谱特征与机械声源对应关系明确,多机组合测试具有机械声源数目与布放位置已知、振动传递特性与水下壳体声辐射特性明确的特点,将水声场中不同空间位置作为水声场评价点,考察分离量化算法对不同空间位置的声场评价点的声源贡献分离性能。设备机脚测点、壳体测点分别作为内部振动源识别子系统、外部机械声源识别子系统的输入信息,其选择通过重相干函数计算验证了层次诊断系统输入信息是完备的。
在表3中工况4的条件下,将近场辐射噪声测量系统中心测点作为声场评价点进行层次诊断。对声场评价点处声信号进行功率谱分析和1/3倍频程能量分布分析,结果如图8所示。
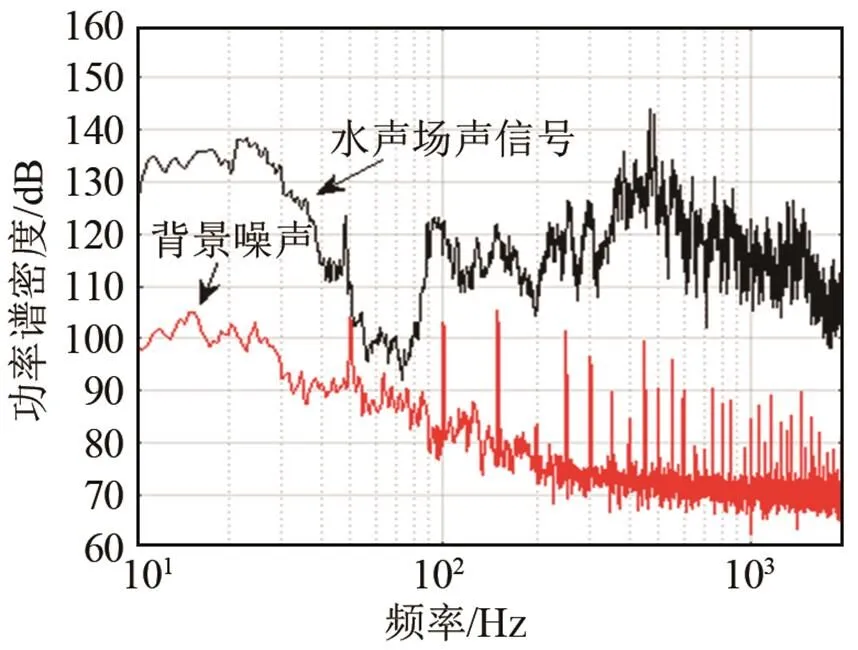
(a) 声场评价点处声信号功率谱
(b) 声场评价点处声信号1/3倍频程能量分布分析
图8 声场评价点处声信号频谱分析
Fig.8 Frequency spectrum analysis of acoustic signal
选取水下辐射噪声的特征频带作为频率层元素,分别是以400、500、630、800 Hz和1 000 Hz为中心频率的1/3倍频程频带,建立水下辐射噪声层次诊断模型如图9所示。
采用层次诊断可得各壳体测点对声场评价点贡献的排序权重为


图9 机械声源定量识别层次诊断模型
Fig.9 Hierarchy diagnosis model of mechanical noise identification
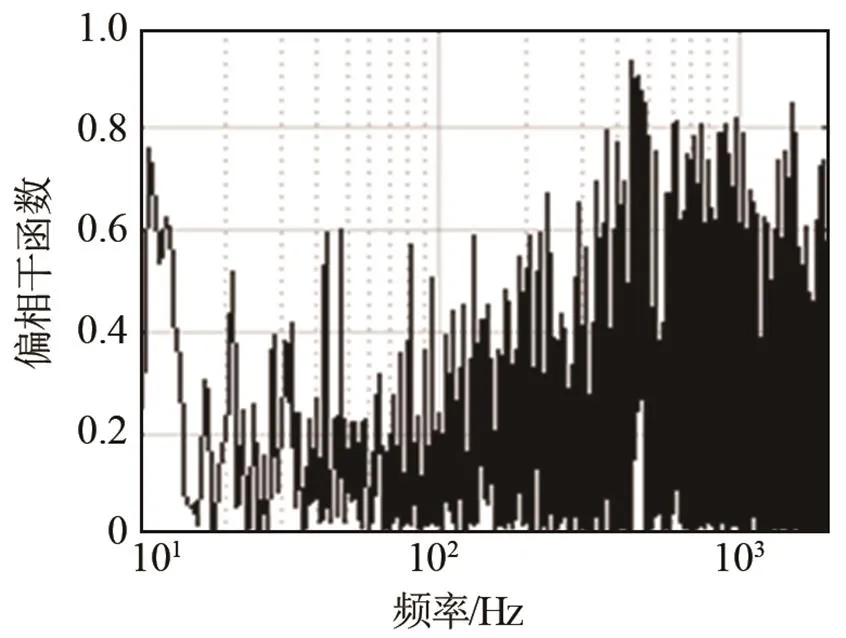
(a)A1测点与E1测点之间偏相干函数
(b)C1测点与E1测点之间偏相干函数
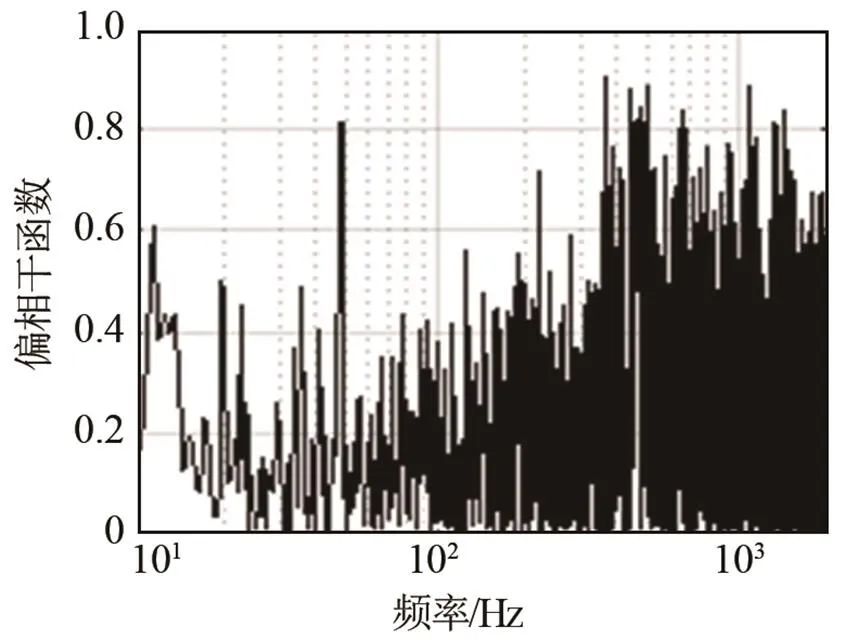
(c)A1测点与E2测点之间偏相干函数
(d)C1测点与E2测点之间偏相干函数
图10 A1测点、C1测点与壳体测点之间偏相干函数
Fig.10 Partial coherence function between A1, C1and E2

表4 设备测点对壳体测点贡献比例计算
采用加权平均法对两个环节的计算结果进行融合得到的计算结果如表5中的第一组试验结果所示。其它的试验数据处理过程与此类似,不再赘述,舱段模型机械声源分离量化结果如表5所示。
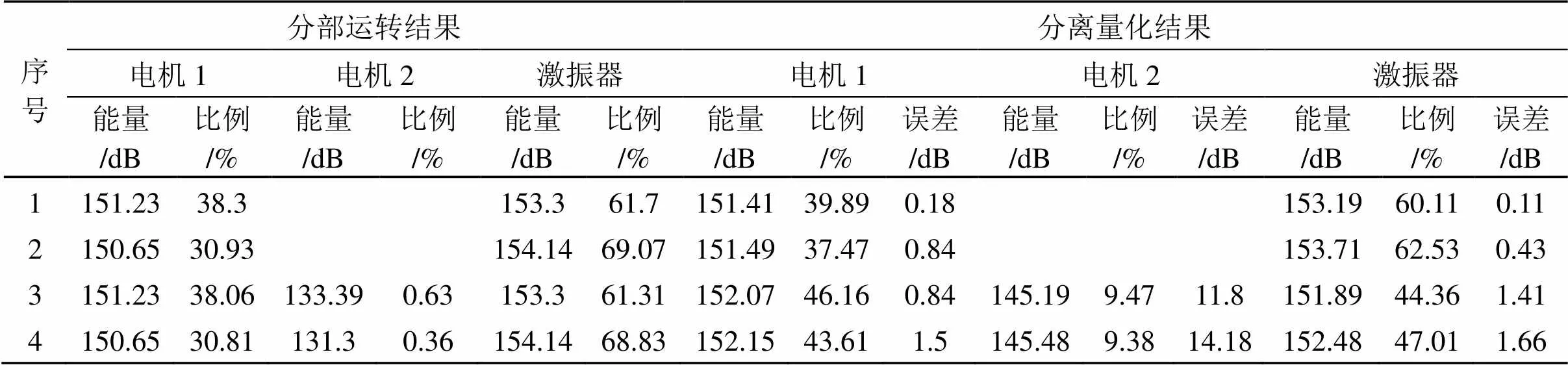
表5 噪声源分离量化结果
在表5中,第一组和第二组试验结果是在工况4条件下,分别以近场辐射噪声测量系统中心测点和远场单点辐射噪声测量水听器作为声场评价点得到的。采用分部运转法对工况1和工况3进行分析可知,激振器单开时的水下辐射噪声能量比电机1高2~3 dB。在两种工况下得到的分离量化结果均可以正确识别出激振器是主要噪声源,这与分部运转法得到的结论是一致的,且两台设备的分离量化误差均低于1 dB。
表5中的第三组和第四组试验结果是在工况5条件下,分别以近场辐射噪声测量系统中心测点和远场单点辐射噪声测量水听器作为声场评价点得到的测试结果。对分部运转工况进行处理可知,电机1和激振器的水下辐射噪声能量比较接近,且激振器强于电机1,两者均高于电机2大约20 dB。在这两种工况下,采用层次诊断技术得到的噪声源分离量化结果均可以对噪声源进行正确排序,电机1和激振器的分离量化误差不大于2 dB,而电机2的分离量化误差大于10 dB。由声场能量叠加原理可知,若两声源辐射声能量相差大于10 dB,则较小声源对总声场的贡献可以忽略;那么在噪声源分离量化过程中,即使强噪声源有较小的分离量化误差,都将会导致弱噪声源有较大的分离量化误差,所以电机2的分离量化误差较大也是合理的,但这并不影响后续减振降噪工作开展及其实施效果。
4 结论
通过舱段模型机械声源定量识别试验,获得舱段模型的机械设备机脚以及壳体表面振动能量的分布情况及其近场、远场辐射噪声数据,基于递阶层次结构分析模型,采用偏相干输出谱分析与层次分析相结合的层次诊断方法,实现了舱段模型机械声源分离量化,确定各机械噪声源对辐射声场评价点的贡献大小。得到主要结论如下:
(1) 对舱段模型激励设备单机和组合单机激励测试工况进行处理,利用基于偏相干分析的层次诊断技术对测试数据进行了分析处理,并对处理结果采用分部运转法进行了准确性检验,从而验证了层次诊断技术在耦合条件下机械声源定量识别中的有效性。
(2) 试验研究为水下航行体机械噪声源测试分析提供了有效的测试分析手段,对潜艇减振降噪措施效果的评定、机械设备减振降噪性能的评估以及声学设计均具有重要的指导意义和一定的工程应用价值。
[1] 俞孟萨, 黄国荣, 伏同先. 潜艇机械噪声控制技术的现状与发展概述[J]. 船舶力学, 2003, 7(4): 110-120.YU Mengsa, HUANG Guorong, FU Tongxian. Development review on mechanical-noise control for submarine[J]. Journal of Ship Mechanics, 2003, 7(4): 110-120.
[2] 黄其柏, 王雪川, 卢文祥, 等. 分布噪声源诊断的偏相干理论与方法[J]. 声学技术, 1995, 14(3): 97-101. HUANG Qibai, WANG Xuechuan, LU Wenxiang, et al. The theory and method of partial coherence analysis of distribution noise source diagnosis[J]. Technical Acoustics, 1995, 14(3): 97-101.
[3] 汪庆年, 李红艳, 史风娟, 等. 基于频谱分析的电机噪声源的识别[J]. 声学技术, 2009, 28(4): 528-531. WANG Qingnian, LI Hongyan, SHI Fengjuan, et al. Motor noise identification based on spectrum analysis[J]. Technical Acoustics, 2009, 28(4): 528-531.
[4] Ian Davis, Gareth J. Bennett. Experimental investigation of coherence based noise source identification techniques for turbomachinery applications–classic and novel techniques[C]//Portland, Oregon: 17th AIAA/CEAS Aeroacoustics Conference (32nd AIAA Aeroacoustics Conference), 2011.
[5] 吴海平, 楼京俊, 刘文武. 相干噪声源贡献量排序分析方法[J]. 四川兵工学报, 2012, 33(11): 89-92. WU Haiping, LOU Jingjun, LIU Wenwu. The order analysis method for the contribution of coherent noise sources[J]. Journal of Sichuan Ordnance, 2012, 33(11): 89-92.
[6] 余桐奎. 改进的复杂噪声源识别方法[J]. 振动与冲击, 2012, 31(14): 152-156. YU Tongkui. Improved method for noise identification[J]. Journal of Vibration and Shock, 2012, 31(14): 152-156.
[7] 杨德森, 韩闯, 时胜国, 等. 基于倒谱和偏相干分析的噪声源分离方法[J]. 哈尔滨工程大学学报, 2014, 35(1): 16-24.YANG Desen, HAN Chuang, SHI Shengguo, et al. Separation of noise sources based on the cepstrum and partial coherence theory[J]. Journal of Harbin Engineering University, 2014, 35(1): 16- 24.
[8] 孙宏才, 田平, 王莲芬. 网络层次分析法与决策科学[M]. 北京: 国防工业出版社, 2011. SUN Hongcai, TIAN Ping, WANG Lianfen. Analytic network process and decision making science[M]. Beijing: National Defense Industry Press, 2011.
[9] 贝达特J S, 皮尔索A G. 相关分析和谱分析的工程应用[M]. 北京: 国防工业出版社, 1983. Bendat J S, Piersol A G. Engineering application of correlation and spectral analysis[M]. Beijing: National Defense Industry Press, 1983.
[10] 时胜国, 于树华, 韩闯, 等. 基于层次诊断的水下结构振动噪声源分离量化[J]. 振动与冲击, 2014, 33(9): 33-39. SHI Shengguo, YU Shuhua, HAN Chuang, et al. Separation and quantification of underwater structural vibration and noise sources based on hierarchy diagnosis[J]. Journal of Vibration and Shock, 2014, 33(9): 33-39.
The experimental research on identification and quantification of mechanical noise in submarine cabin model
YU Shu-hua1, SHI Sheng-guo1,2, SHI Jie1,2, HAN Chuang3
(1. College of Underwater Acoustic Engineering, Harbin Engineering University, Harbin 150001, Heilongjiang,China;2. Acoustic Science and Technology Laboratory, Harbin Engineering University, Harbin 150001, Heilongjiang, China;3. School of Measurement and Communication, Harbin University of Science and Technology, Harbin 150080, Heilongjiang, China)
To identify the dominant noise source accurately is the premise of controlling mechanical noise of submarine effectively. To solve the separation and quantification problem of mechanical noise source for submarine, hierarchy diagnosis is proposed which combines the partial coherence output power spectrum analysis and analytic hierarchy process. Hierarchical structure is established for the separation and quantification of complex noise source, judgment matrix is constructed through pairwise comparison, the separation and quantification result of noise source can be calculated. To validate the effectiveness of hierarchical diagnosis in engineering application, the tank experimental research on quantification and identification of the mechanical noise source in submarine cabin model is carried on, the contribution rate of mechanical noise sources is separated by hierarchy diagnosis, and separation accuracy of mechanical noise sources is checked by the experiment.
noise source identification; hierarchy diagnosis; partial coherence analysis; cabin model experiment
TB53
A
1000-3630(2017)-03-0217-07
10.16300/j.cnki.1000-3630.2017.03.004
2016-12-18;
2017-03-15
长江学者和创新团队发展计划(IRT_16R17)、国家自然科学基金资助项目(61601149)
于树华(1986-), 男, 辽宁大连市人, 博士研究生, 研究方向为噪声源定位识别。
时胜国, E-mail: shishengguo@hrbeu.edu.cn