一种基于特征点的图像匹配新方法
2017-10-23李为华
李为华,苏 辉
(信阳师范学院 a.计算机与信息技术学院; b.网络信息与计算中心,河南 信阳 464000)
一种基于特征点的图像匹配新方法
李为华a,苏 辉b
(信阳师范学院 a.计算机与信息技术学院; b.网络信息与计算中心,河南 信阳 464000)
如何从浩如烟海的图像数据库中迅速并准确地进行图像匹配成为数字生活中的一项难题。为了解决这个难题,本文提出一种图像匹配新方法:针对FAST 算法噪声敏感不足、不具有尺度不变性进行改进——得到Zoser-FAST算法;结合SIFT算法,以描述符间的点积作为相似性度量进行图像匹配。仿真实验结果表明改进的图像匹配方法大大减少了运算量,加快了图像匹配的运算速度、提高了准确率。
图像匹配;SIFT;尺度空间;Zoser-FAST
图像匹配技术是计算机视觉研究领域中一项非常重要的工作,是由图像处理到图像分析的关键步骤[1]。按照图像匹配过程中的特征提取和特征描述的不同,图像匹配算法可分为两类[2]:基于灰度和基于特征的图像匹配算法。
相比基于灰度的图像匹配方法在实时性和精度上的弱点,基于特征的图像匹配方法可以最大的克服这些不足,并取得了很多的成果。Xiao等[3]在原有SIFT算法的基础上,提出了一种改进的脑CT图像点匹配算法,该算法将SIFT和灰度特征相结合。利用灰度特征向量的欧氏距离和余弦相似度作为相似度度量,得到最终匹配点对。Qu等[4]针对异源图像不同成像机理所带来的匹配精度低的问题,提出了一种新的基于SURF特征点提取和双向匹配的图像配准算法。Ding等[5]一种基于灰关联度和特征点分析的图像匹配方法,具有较高的匹配精度和鲁棒性,可以消除拉伸、旋转、光照变化的影响。
本文结合SIFT算法从特征提取和图像匹配两个阶段分别进行改进,给出一种基于Zoser-FAST特征点提取的快速图像匹配新方法。
1 基于Zoser-FAST特征点提取的图像匹配方法
FAST(Features from Accelerated Segment Test)算法因计算快速广泛运用于图像匹配,目标跟踪等方面[6]。在特征提取阶段,选用FAST算法,针对其对尺度变化敏感提出一种新的特征提取算法Zoser-FAST算法;在图像特征匹配阶段,结合SIFT算法使用特征向量描述子点积代替欧氏距离作为相似性度量的方法。
1.1 特征提取算法
Zoser-FAST特征点检测算法,具体包含两个部分:第一部分是构造阶梯金字塔图像模型结构,使用在SIFT算法中的高斯金字塔上改进的Zoser金字塔来扩展到多尺度;第二部分是采用FAST算法提取极值点,使用24邻域极值点算法来增强其抗噪能力,再通过多尺度提取稳定点,最后使用非最大化抑制剔除冗余点。
(1)阶梯金字塔图像模型结构
高斯阶梯图像金字塔,又可以称为Zoser金字塔。首先对图像进行高斯卷积运算,设图像为I(x,y),可变尺度的二维高斯函数为G(x,y,σ),二维高斯函数G(x,y,σ)的定义如式(1):
(1)
则图像的尺度空间L(x,y,σ)的计算为:
L(x,y,σ)=G(x,y,σ)⊗I(x,y)
(2)
其中σ为高斯函数的尺度因子,其取值决定着图像的平滑程度,⊗为卷积运算符号。
Zoser-FAST算法中所用的Zoser金字塔由于只对原图像进行一次高斯卷积,提取特征点速度快,而且Zoser-FAST算法所提取的特征点数量相较DOG算法并没有大幅下降,不会影响到图像匹配的最终结果。
(2)特征点的提取
S1. 对Zoser金字塔的每一层图像用Segment-test[7-9]算子提取初始特征点;
S2. 对提取的像素点集{qi},选取每个点的8邻域计算平均值avg,与外层的16个像素进行比较,采用Segment-test 算子的原理,剔除一些噪声极值点;
S3. 在下层以上层特征点对应位置为圆心,以r为半径进行搜索,离圆心最近的点就是最稳定的尺度不变特征点;
S4. 使用非最大化抑制,剔除许多冗余的特征点。
通过计算局部极大值来剔除非局部极值点,为此可以用一个角点响应函数V来进行对干扰点的过滤。
V=max(∑x∈Sbrighter|Ip→x-Ip|-t,∑x∈Sdarker|Ip-Ip→x-t)
(3)
其中,Ip→x表示的是圆形模板中的像素值。
1.2 SIFT 描述子的生成
SIFT 描述子是对特征点附近邻域内高斯梯度统计结果的一种表示,它是一个三维的阵列,但通常将它表示成一个矢量。
本文改进方法的特征描述子形成过程与SIFT算法步骤相同,首先使用梯度直方图确定特征点的主方向,将坐标轴旋转到这个方向以确定基准,之后将梯度方向进行高斯加权累加绘制,得到一个种子点,一个种子点有8个方向信息,一个关键点由16个种子点构成,最终获得128维的特征描述子。

1.3 图像匹配方法
(1)相似性度量
SIFT算法是使用欧氏距离作为相似性度量[10,11]。本文提出的方法是将特征向量描述子之间的点积作为相似性度量来减少匹配运算量。
设特征点描述子的维数为N,即该特征向量中有N个参数,则两个特征点的特征描述子di和dj之间的欧氏距离和夹角的余弦值可以定义如下:

(6)
cos(θ(i,j))
(7)
由SIFT算法生成描述子的过程可知,特征描述子作了归一化处理,其模为1,因此两描述子夹角的余弦值可以用其点积进行求取,如式(7)所示。点积运算只有乘法运算和加法运算,会大大地降低计算量,从而达到加速匹配的目的。
(2)匹配策略
在一幅图像中取第i(i=1,2,…,m)个特征描述子,计算这个点与另一幅图像中所有特征描述子之间点积b(i,j)(j=1,2,…,n),然后对b(i,j)的值按从小到大的顺序依次排列,若点积b(i,j)中的最大值大于阈值t1,且b(i,j)中的次大值与最大值之间的比值小于阈值t2,则将第i个点作为初始匹配点,否则放弃此点。
在得到的匹配点集中采用SIFT算法中的RANSAC 算法进行剔除错误匹配点对。
2 实验结果分析
为了验证本文方法的优越性,和SIFT算法、SURF 算法在图像发生模糊变化时的匹配效果做一个仿真对比分析。SURF 算法是2006 年,Bay 等人针对SIFT算法运算量大且处理时间长的缺点提出的一种能够对特征点提取和描述进行加速的快速鲁棒的特征描述方法(Speeded Up Robust Features)。
实验图片大小为512×512。在SIFT算法、SURF 算法中特征向量的匹配阶段,取最小欧式距离与次小欧式距离之比的阈值为0.5。本文方法,取点积最大值大于的阈值为0.5,且次大值与最大值之间的比值要小于的阈值为0.7。
本文以正确匹配率和处理时间来评估算法的性能。正确匹配率是RANSAC算法剔除掉错误匹配点后的得到的正确匹配点数占总匹配点数的比例。
图像存在模糊变化时的仿真实验匹配效果:
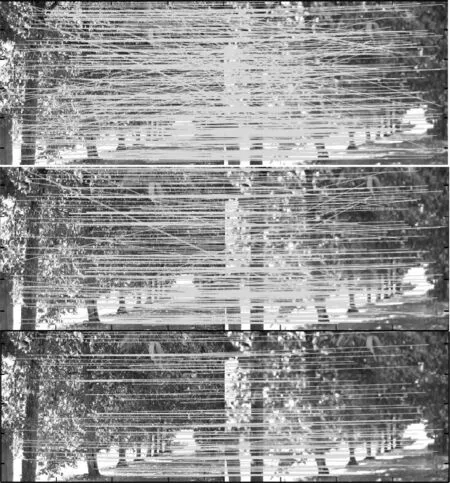
图1 算法模糊操作匹配图(从上至下依次为SIFT算法、SURF算法、本文方法)
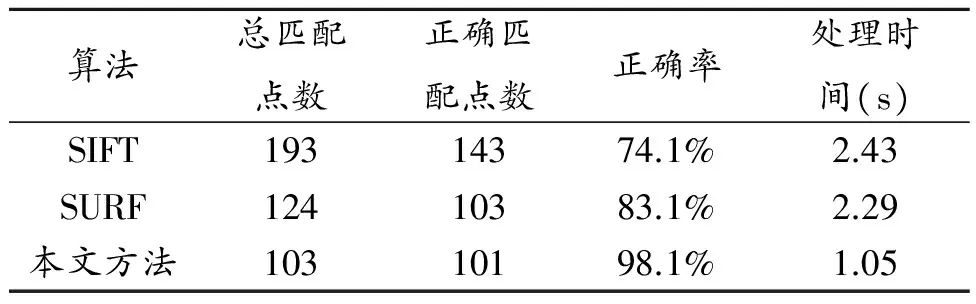
表1 模糊操作算法匹配效果对比表
表1数据表明,虽然本文算法在提取的匹配点上比SIFT算法和SURF算法少一些,但其正确匹配率比SIFT算法高24%,比SURF高15%,在处理时间上,本文改进算法比SIFT算法缩短了56.8%,比SURF算法缩短了54.1%。
从图像的模糊变化的比较来看,本文改进方法在处理时间、正确率上优于SIFT算法和SURF算法。对于提取的特征数量,改进算法提取的特征点数量虽然较另外两种算法都少,但并没有减少太多,所以对于图像匹配的最终结果没有太大的影响。
3 结束语
本文提出一种基于SIFT算法进行改进的图像匹配方法。在特征点提取阶段,使用了一种新的特征提取算法Zoser-FAST算法,既减少了运算量又保证了鲁棒性;在特征点描述阶段仍使用SIFT算法的128维描述法;在图像匹配阶段,使用将描述符之间的点积作为相似性度量的方法,减少运算量。改进的方法在最终的匹配效果得到保证的情况下,其匹配实时性要远好于SIFT算法和SURF算法。
[1]殷伶.图像匹配技术的研究[D].西安:西安电子科技大学,2010.
[2]彭真明等.基于多特征融合的图像匹配模式[J].强激光与粒子束,2004,16 (3) :281-132
[3] Xiao Z, Yu L F, Qin z, Ren H G, Geng Z W. A point matching algorithm for brain CT images based on SIFT and gray feature. 2016 IEEE 13th International Conference on ?Signal Processing (ICSP),6-10 Nov. 2016.
[4]Qu X J, Sun Y, Gu Y, Yu S, Gao L W. A high-precision registration algorithm for heterologous image based on effective sub-graph extraction and feature points bidirectional matching. 2016 12th International Conference on Natural Computation, Fuzzy Systems and Knowledge Discovery (ICNC-FSKD), 13-15 Aug. 2016.
[5]Ding Z S, Qian S, Li Y L, Li Z H. An image matching method based on the analysis of grey correlation degree and feature points. NAECON 2014 - IEEE National Aerospace and Electronics Conference, 24-27 Jun. 2014.
[6]汪汉云. 异类遥感图像配准技术研究[D]. 国防科技大学硕士学位论文,2010.
[7]Edward Rosten. High performance rigid body tracking. PH.D. thesis, Churchill College[C]. University of Cambridge,2006.
[8]E. Rosten, T. Drummond. Machine learning for high-speed corner detection[C]. Proceedings of the European Conference on Computer Vision,2006.
[9]J.R. quinlan. Introduction of decision trees. Mach. Learn. 1986,81-106.
[10]群伟.基于SIFT特征点提取的图像检索研究[D].武汉:华中科技大学,2010.
[11]侯刚.基于内容的图像检索中特征表示与检索策略研究[D].长春:吉林大学,2014.
New Method of Image Matching Based on Characteristic Points
LI Wei-hua1, SU Hui2
(1.College of Computer and Information Technology,2.Network Information and Computing Center, Xinyang Normal University, Xinyang Henan 464000, China)
How multimedia could quickly and accurately match an image from the vast image database has become a problem in the digital life. In order to solve the problem, a new method of image matching is proposed in this paper: from FAST algorithm because it has inadequate noise sensitiveness and has no scale invariance, Zoser-FAST algorithm is developed; image matching is carried out with descriptor’s scalar product as similarity measurement. According to the simulation experiment, the improved image matching method could greatly decrease the work load of calculation, speed up the calculation of image matching and promote the accuracy.
image matching; SIFT; scale space; Zoser-FAST
TP391.413
A
1674-344X(2017)8-0025-04
2017-07-03
河南省高等学校重点科研项目(17B520034); 河南省教育厅教改研究项目(2017-JSJYYB-055)
李为华(1971-),女,河南光山人,副教授,硕士,研究方向为模式识别与人工智能。