基于Adaboost分类器的车辆检测与跟踪算法
2017-10-23陈拥权陈学三
陈拥权,陈 影,陈学三
(合肥寰景信息技术有限公司,合肥 安徽 230088)
基于Adaboost分类器的车辆检测与跟踪算法
陈拥权,陈 影,陈学三
(合肥寰景信息技术有限公司,合肥 安徽 230088)
车辆检测与跟踪是智能交通领域的重要研究课题之一。为了促进平安城市的建设,更好地辅助车辆驾驶,提出了一种基于类Haar特征和Adaboost分类器的实时车辆检测与跟踪算法。采集大量车辆正负样本图像,基于积分图提取图像的类Haar特征;利用Adaboost算法对类Haar特征进行选择及分类器训练;利用得到的分类器进行模式匹配,实现对车辆的检测。在相邻帧中进行车辆的特征匹配,完成车辆的跟踪。在车辆跟踪的基础上,通过场景标定,实现对车辆的测速和车流量的统计。在真实道路场景中的实验结果表明,所提方法能实时并有效地对车辆进行检测与跟踪,在一定程度上缓解了交通压力;能准确地进行车辆测速和车流量统计,可为超速和道路拥挤的判定提供相关依据,具有较好的应用前景。
车辆检测与跟踪;类Haar特征;Adaboost算法;测速;车流量统计
0 引 言
随着城市化进程的加快,智能交通的重要性越发凸显。而车辆检测作为智能交通领域中至关重要的一部分,激发了广大学者们的研究兴趣。车辆检测方法一般有光流法[1-2]、帧差法[3-4]和背景差分法[5-6]等。其中,光流法的算法复杂度较高,不能在实时系统中得到有效应用;帧差法虽然算法复杂度较低,但是检测精度达不到应用的需求;背景差分法是最常用的方法,但背景的初始化和维护比较困难,且由于忽视了相邻像素点之间的关系,因此抗噪声能力较差,同时算法易受图像阴影的干扰,也不能很好地解决遮挡问题。
近年来,机器学习的发展为目标检测提供了新的思路。在基于神经网络的目标检测方法中,Rowley等提出采用局部连接的神经网络进行人脸检测[7],取得了较好的效果,具有里程碑的意义;张全发等提取图像的梯度方向直方图特征,利用支持向量机训练分类器,实现图像中工程车辆的检测[8],具有较高的准确度。为此,利用Adaboost算法[9-10]实现车辆的检测,其针对同一个训练集训练不同的弱分类器,然后联合弱分类器,构造最终的强分类器。Adaboost算法无需任何关于弱学习器性能的先验知识,算法效率高,具有很强的应用性。
在车辆跟踪方面,基于区域的跟踪方法[11]很难处理车辆间的遮挡问题;基于模型的方法[12]存在难以获得所有车辆详细的几何模型和稳健性不够高的问题;而动态轮廓法[13]在复杂的交通场景中初始化较困难。为此,提出一种基于类Haar特征与Adaboost分类器的车辆检测与跟踪算法。该算法采用基于特征的跟踪方法[14],将车辆的某些特征作为匹配跟踪的基础,并用相应的特征参数来描述目标的运动状态,通过跟踪车辆上的某些特征实现对车辆的跟踪。在车辆跟踪的基础上,通过场景标定,将图像坐标转化为世界坐标,实现对车辆的测速和车流量的统计。
1 基于Adaboost算法的车辆检测
Adaboost算法的主要思想是将许多分类能力较差的弱分类器通过一定方式整合起来,构成一个分类能力较强的强分类器,再将若干强分类器串联起来,形成分级分类器,进一步在图像上进行多尺度搜索检测。
1.1特征选取与计算
为了判断图像中是否含有车辆,需要对车辆的多个特征进行建模。这里选用Viola等提出的类Haar特征[10,15]作为车辆检测的特征向量,对车辆进行刻画。
类Haar的每个特征由多个矩形组成,可以对边缘和线性特征进行检测,其特征值的计算为组成的矩形区域灰度积分之和,如式(1)所示。
(1)
其中,ωi∈R为矩形的权重;RecSum(ri)为矩形ri构成的区域灰度积分;N为构成的矩形个数。
1.2Adaboost算法描述
利用级联分类器作为判断图像窗口类别的二分类器,该级联式的分类器能快速排除图像中绝大部分的非车辆窗口,进而加快车辆检测速度。算法描述如下:
(1)对于给定的训练样本(x1,y1),(x2,y2),…,(xn,yn),其中yi=0代表其为非车辆(负样本),yi=1代表其为车辆(正样本),n为训练样本总数。
(2)对权重进行初始化:w1,i=D(i)。当样本是正样本时,D(i)=1/2k;当样本是负样本时,D(i)=1/2l。其中k,l分别为正负样本的数量,k+l=n。
(3)对t=1,2,…,T,有:
①归一化权重。

(2)
②基于每个特征f均训练一个弱分类器h(x,f,p,θ);计算所有这些弱分类器的加权(qt)错误率εf。
εf=∑iqi|h(xi,f,p,θ)-yi|
(3)
③选择最佳的弱分类器ht(x)(拥有最小错误率εt)。
(4)
④按照该最佳弱分类器调整权重。
(5)
(4)最终的强分类器如式(6)所示:
(6)

在训练时,减小被正确分类的样本权重,增加被错误分类的样本权重,以强化后面训练的简单分类器对这些错误分类样本的训练。最后,整合所有的弱分类器,构成最终的强分类器。
1.3车辆检测流程
车辆检测分类器采用离线的方式进行训练,以保证车辆检测的实时性。在视频的各个场景中采集大量的车辆和非车辆正负样本;提取样本图像的类Haar特征,进一步进行特征选择;基于Haar特征训练一系列Adaboost弱分类器,依据权重把这些弱分类器组合成强分类器。该过程运算量较大,耗时较长,但因在离线的模式下进行,不会占用系统检测时间。
利用训练得到的分类器对采集的车辆图像进行检测,具体过程如下:在待检测图像上利用不同大小的矩形框进行多尺度扫描,利用级联分类器对扫描的每个矩形区域进行判断。如果某矩形区域通过了所有的级联分类器,说明该区域为车辆窗口,并得到当前图像中车辆所在的位置;否则,说明该区域不是车辆区域。车辆检测的具体流程如图1所示。

图1 车辆检测算法流程
2 基于特征匹配的车辆跟踪
车辆跟踪的基本思想是确定同一辆车在不同帧中的位置。基于特征匹配的车辆跟踪并不是对整个车进行跟踪,仅利用检测框的质心进行匹配。通过对车辆上点的跟踪来完成对车辆的跟踪,当车辆存在部分遮挡时,该算法仍能保持较好的跟踪效果。


(7)

(8)

(9)

当当前帧中车辆的质心与估计的质心位置差距越小时,函数f3的值越小。
利用式(7)对相邻帧中的车辆质心进行匹配,可以形成轨迹。如果k的值不存在,则表示帧t中车辆i为新出现的车辆,在帧t+1中开始跟踪,将形成一条新的轨迹;如果帧t-1中有未被匹配上的车辆质心,则表示对该车辆的跟踪结束。由于交通场景中连续两帧之间图像的差异很小,加之车辆的运动为刚性运动,所以在两帧之间可以很好地对质心进行匹配。
基于特征匹配的车辆跟踪方法具有其他方法少有的优点,具体如下:
(1)提取的特征较为简单,运算速度较快,实时性较好;
(2)抗遮挡和光照变化能力较强。在跟踪过程中,即使车辆间发生部分遮挡或者光照变化,也能准确地检测出跟踪框质心的位置,仍然可以对运动车辆进行持续跟踪。
3 实验及结果分析
为了验证所提算法的有效性,在拍摄的真实道路场景中的视频图像上采集不同环境、不同光照条件下的车辆正负样本,其中正样本4 000,负样本8 500,并全部归一化为24*24像素的大小,部分样本如图2所示。

图2 部分训练样本
使用OpenCV来实现样本的特征提取和分类器的训练,训练阶段数设为18。每个阶段分类器需要的最小命中率设为0.995,总的错误警告率为0.5。按照该设置得到的强分类器个数为18,每个强分类器包含了若干弱分类器及其分割的阈值。
3.1车辆检测

(10)
其中,0<α<1,实验中取α=0.7。
部分车辆检测结果如图3所示,其中外面较大的矩形框为检测的感兴趣区域,里面较小的矩形框标出的为检测到的车辆区域。

图3 车辆检测结果
由图3可以看出,在不同环境、不同光照条件下,该算法对不同行驶方向的车均有较好的检测效果。每帧图像处理的时间在20 ms左右,达到了实时检测。
3.2车辆跟踪
在检测的基础上,对检测框的质心进行匹配,形成车辆运动的轨迹,完成车辆的跟踪。依据车辆出现的先后顺序,对车辆进行标号。部分车辆跟踪结果如图4和图5所示,其中外面较大的矩形框为跟踪的感兴趣区域,里面较小的矩形框标出的为检测到的车辆区域,车辆后面的曲线为车辆运动的轨迹。

图4 晴天前拍车辆跟踪结果

图5 阴雨天后拍车辆跟踪结果
由图4和图5可以看出,在不同环境、不同光照条件下,该算法对不同行驶方向的车均有较好的跟踪效果,只有在极个别的情况下才会出现在某一帧跟丢的情况。算法有效性得到验证。每帧图像处理的平均时间在30 ms左右,达到了实时跟踪。
3.3测速与流量统计
在跟踪的基础上,还进行了车辆测速和流量统计,扩展了车辆跟踪的应用。这里通过计算轨迹点的速度来估计车辆的速度。由于轨迹点会出现在图像的不同位置,而像素间的距离和真实世界的距离不成比例,因此需要通过场景标定来解决。在实验中采集36对图像坐标点和对应的世界坐标点,计算单应矩阵,进而对图像坐标和世界坐标进行转换。因为标定的是二维场景,所以计算速度的点越靠近地面,计算出的速度的准确度越高。实验中取检测框下边界的中点O,将该点的图像坐标转为世界坐标,根据点O在两帧图像中移动的距离和帧差,计算点O的速度,用点O的速度近似地估计车辆的速度。为了保证速度的稳定性,只对帧t中轨迹大于5的车辆采用多帧平均法进行速度的计算。
具体过程如下:分别计算点O在下列两帧图像:(t,t-1),(t,t-2),…,(t,1)之间的速度;求出上述t-1个速度的平均值u和标准差sigma,如果某一个速度v满足:abs(v-u)>sigma,则认为该速度是外点,予以舍弃;求剩余速度的平均值即为该车辆在帧t中的速度。
统计到当前帧为止,经过某一绊线的车辆数量。在感兴趣区域内定义一条水平的绊线y=LineY(世界坐标),在车辆跟踪的基础上,如果某个车辆的轨迹长度大于1,则求得该车辆检测框质心在当前帧和上一帧中的世界坐标位置,分别为(xt,yt)、(xt-1,yt-1),假设LineY>yt>yt-1,进而得到y方向帧间距离l=yt-yt-1。如果0 部分车辆测速和流量统计结果如图6所示。 图6 车辆测速与车流量统计结果 由图6可以看出,车辆测速算法可以较准确地对车辆进行测速,经实验得知测量值和真实车速之间的差距在±1 km/h之内。在良好的车辆检测基础上,车流量统计算法可以精确地对车辆的个数进行统计,准确率高达99%以上。每帧图像处理的平均时间在35 ms左右,达到了实时测速与车流量统计。 为了促进智能交通的进一步发展,提出了一种基于Adaboost算法的车辆检测方法。该方法利用基于特征匹配的跟踪方法对车辆进行跟踪,在车辆跟踪的基础上实现对车速的测量和车流量的统计。实验结果表明,该方法在不同的环境与光照条件下均可以对不同行驶方向的车辆进行实时精确地检测与跟踪。今后,针对道路交通环境的复杂性,将进一步研究车辆的连续精确检测跟踪方法,并同时对车辆闯红灯、违章停车等行为的检测方法进行研究。 [1] Xin Y,Hou J, Dong L,et al. A self-adaptive optical flow method for the moving object detection in the video sequences[J].International Journal for Light and Electron Optics,2014,125(19):5690-5694. [2] 朱 婧.基于改进的光流场算法对运动目标的检测与跟踪技术研究[D].哈尔滨:哈尔滨工程大学,2006. [3] 姚春莲,郭克友.一种利用帧差信息的实时运动对象检测算法[J].计算机工程与应用,2011,47:390-394. [4] Weng M Y,Huang G C,Da X Y.A new interframe difference algorithm for moving target detection[C]//International congress on image and signal processing.[s.l.]:[s.n.],2010:285-289. [5] Zhu Y. Moving objects detection and segmentation based onbackground subtraction and image over-segmentation[J].Journal of Software,2011,6(7):1361-1367. [6] Wang W,Yang J,Gao W.Modeling background and segmenting moving objects from compressed video[J].IEEE Transactions on Circuits and Systems for Video Technology,2008,18(5):670-681. [7] Rowley H A,Baluja S,Kanade T.Neural network-based face detection[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,1998,20(1):23-38. [8] 张全发,蒲宝明,李天然,等.基于HOG特征和机器学习的工程车辆检测[J].计算机系统应用,2013,22(7):104-107. [9] 文学志,方 魏,郑钰辉.一种基于类Haar特征和改进AdaBoost分类器的车辆识别算法[J].电子学报,2011,39(5):1121-1126. [10] 李文波,王立研.一种基于Adaboost算法的车辆检测方法[J].长春理工大学学报:自然科学版,2009,32(2):292-295. [11] Comanniciu D,Ramesh V,Meer P.Kernel-based object tracking[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2003,25(5):564-577. [12] 刘国翌,陈 睿,邓 宇,等.基于视频的三维人体运动跟踪[J].计算机辅助设计与图形学学报,2006,18(1):82-88. [13] Freedman D,Zhang T.Active contours for tracking distributions[J].IEEE Transactions on Image Processing,2004,13(4):518-526. [14] Tissainayagam P,Suter D.Object tracking in image sequences using point feature[J].Pattern Recognition,2005,38(1):105-113. [15] Viola P,Jones M.Robust real-time face detection[J].International Journal of Computer Vision,2004,57(2):137-154. AVehicleDetectionandTrackingAlgorithmBasedonAdaboostClassifier CHEN Yong-quan,CHEN Ying,CHEN Xue-san (Hefei VRview Information Technology Co.,Ltd.,Hefei 230088,China) Vehicle detection and tracking is one of the most important research topics in the field of intelligent transportation.A real-time algorithm of vehicle detection and tracking based on Haar-like features and the Adaboost classifier is proposed to promote the construction of safe city and assist vehicle driving.A large number of positive and negative sample images of vehicle are collected.The Haar-like features of the images are extracted based on the integral map and the Adaboost algorithm is exploited to do Haar-like features selection and classifier training for matching the pattern with the obtained classifier to realize the vehicles detection.The characteristics of the vehicles in the adjacent frames are matched to complete vehicles tracking.By calibrating scene,the vehicle speed measurement and traffic statistics have been achieved based on vehicles tracking.Experimental results in real road scene show that it can effectively conduct vehicle detection and tracking in real-time for alleviating the traffic pressure to some extent and can implement vehicle speed measurement and traffic statistics accurately,which has provided the relevant basis for speeding and road congestion with an excellent application prospect. vehicle detection and tracking;Haar-like features;Adaboost algorithm;speed measurement;traffic statistics TP301.6 A 1673-629X(2017)10-0165-04 2016-11-08 2017-03-14 < class="emphasis_bold">网络出版时间 时间:2017-07-11 安徽省自主创新专项资金计划项目(13Z02005) 陈拥权(1978-),男,硕士,CCF高级会员,研究方向为计算机视觉、图像处理与模式识别。 http://kns.cnki.net/kcms/detail/61.1450.TP.20170711.1457.088.html 10.3969/j.issn.1673-629X.2017.10.035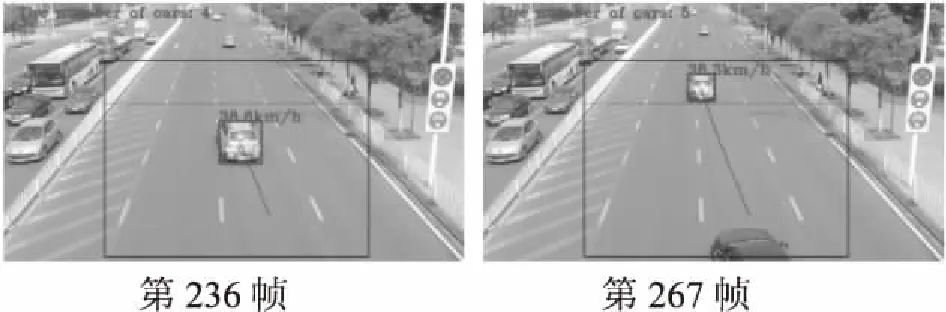
4 结束语
