基于环境信息监控的智能履带车设计
2017-10-21李军豪李务星王麟阁
李军豪 李务星 王麟阁

摘 要:本文以基于ARM的智能小车为研究对象,通过Android端来实现对其控制功能。Android控制系统主要由控制模块、无线、显示屏与按键组成。同时还能处理智能小车所搭载的摄像头模块传来的图像数据,控制台不断接收小车发送的照片(摄像)数据,以便人工判断与识别;通过Android控制端,利用屏幕按键控制小车的运动,通过无线信号和智能小车进行通信。
关键词: 智能小车;数据通信;Android控制;實时监控;环境监控
【中图分类号】 F407.471 【文献标识码】A 【文章编号】2236-1879(2017)05-0204-02
随着信息产业迅猛发展,计算机技术和制造技术取得日新月异的成就。其中中国人在嫦娥工程的初步成功和逐步深入,月球探测器的设计一直吸引着众多科学工作者的关注。智能探测小车属于机器人的范畴,它融合了先进的嵌入式技术、传感器技术、电子电气、路径规划、人工智能和自动控制等技术。机器人车应用领域广泛,包括自动驾驶、反恐、核电站维护、未知区域探测、无人工程产品运输等等,机器人控制技术的发展必将对人们的生产和生活产生深远影响。
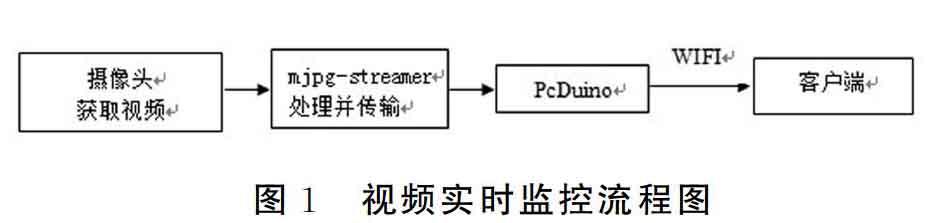
1 视频实时监控设计
通过开源项目mjpg-streamer实现摄像头和开发板之间的数据传输,达到视频实时监控的功能,如图1所示。
本部分功能需要保证的是视频传输的流畅和完整,要使用稳定的数据传输方式,在摄像头上安装360度舵机,能在控制小车的同时控制舵机,实现全方位的视频监控,使视频监控的功能更强大,提高小车的功能性和实用性,扩大小车的适用范围。通过以上硬件模块,和对各个硬件模块的功能分析,通过整理和线路规划,组装完成了我们的智能小车的硬件部分,小车的整体效果如图2所示:
2 控制软件设计
小车可以通过Android手机客户端和PC客户端对小车的动作进行控制,两种控制客户端都是采用Qt来进行编写,在此体现出了Qt开发很好的移植性,兩种控制客户端的设计思想基本相同,下面对设计思想和设计流程进行介绍和说明,如图3所示。控制客户端通过Socket套接字来进行数据信息传输,Socket可以看成在两个程序进行通讯连接中的一个端点,一个程序将一段信息写入Socket中,该Socket将这段信息发送给另外一个Socket中,使这段信息能传送到其他程序中。
3 自动防止跌落功能实现
通过车头上安装的寻迹传感器,测量行驶平面与车底盘之间的距离,当测量距离突然大幅改变时,即为到达行驶平面边缘,小车倒退或调转方向,防止车身跌落,流程图如图4所示。
为了防止跌落功能的正常运行,首先要解决如何区分行驶平面裂缝,坑洞和行驶平面的边缘的问题,在这些问题得到解决的基础上避免因误差或者测量错误导致的运行错误。
通过车头上安装的寻迹传感器,测量行驶平面与车底盘之间的距离,当测量距离突然大幅改变时,即为到达行驶平面边缘,小车倒退或调转方向,防止车身跌落,
通过在车底加装的寻迹传感器,电机驱动板驱动电机步进,寻找出行驶平面上的行驶路线,并按照寻找出的路线自动行走,如图5所示。
本部分功能主要由车底加装的寻线传感器来实现,寻线的准确无误,是保证小车能准确按照路线行走的基础,通过在车底加装的寻迹传感器,寻找出行驶平面上的行驶路线,并按照寻找出的路线自动行走该模块功能与防止跌落功能基本一致,由于黑色和白色的红外线反射时间不同,所以也是通过红外线寻迹传感器发射到接收反射红外线之间的时间来实现判断行车轨迹。
结论
智能小车是现代化智能操控,智能运行的产物,必然是以后的发展方向,它可以按照预先设定的模式在一个环境里自动的运作,不需要人为的管理,可应用于科学勘探等等的用途。本次设计的智能小车除了实现了基本的方向运动以外,还实现了防跌落,智能寻线行走,自动避障,实时监控等功能。
