模糊PID在离心泵恒流量控制中的应用
2017-10-20冯山
冯山
(长江大学电子信息学院,湖北 荆州 434023)
模糊PID在离心泵恒流量控制中的应用
冯山
(长江大学电子信息学院,湖北 荆州 434023)
在多相流实验中,离心泵恒流量控制要求动态性能和稳定性好、控制精度高,普通PID控制器难以满足要求。根据离心泵的流量特性建立了其数学模型,并以该模型为基础,将模糊控制快速响应与PID控制无差调节的优点有机结合起来,设计了新的模糊PID控制器。实验结果显示相对于常规PID控制器,模糊PID控制器综合性能更好,适用于离心泵流量控制。
离心泵;模糊PID控制;恒流量控制
离心泵是由电机带动叶轮高速旋转使流体产生离心运动来运作的。保持叶轮转速恒定,改变阀门开度可以达到调节泵的出口流量的目的。在多相流试验中,离心泵充当着相当重要的角色,它在油相、水相管路中作为动力系统,将油、水增压后输送到各自的计量管路;在油、水回收管路中,它将油水混合液从管路中提升后返回油水混合罐。考虑到多相流实验装置中,离心泵的实际应用情况,对离心泵流量控制要求过渡时间短,无稳态误差,尽量减小超调量和振荡次数,快速的把离心泵出口液体的量平稳地控制在给定值上。
PID控制器拥有结构简单,工作可靠等诸多优点使其被广泛使用。在实际应用中,有时很难对被控对象建立准确的模型,只能依靠技术人员的经验来调试整定其参数,其过程较为繁琐。近年来,随着科技的进步,PID的参数整定中也越来越多的运用到先进的控制算法。笔者以PID控制器为基础,以模糊理论为依据,将两者有机结合起来,设计了新的模糊PID控制器。
1 恒流量方案设计
离心泵流量控制有改变离心泵的出口阀门开度和改变变频器频率来调节叶轮转速的方式。这两种流量控制方法各有其优缺点:直接改变阀门开度的方式调节速度快,受干扰影响程度较低,但是,损失在阀门上的能耗高;变频器调节的方式,改变了泵的转速,避免能量浪费在阀门上的损耗,因此是更节能的方式,但是也存在一定的缺陷,在流体流量较低时,阀后压力会过低,而且在流量设定值或容器压力变化时,动态响应时间较长[1],不能满足多相流实验的要求。因此,笔者采用第1种方式。
1.1结构设计
离心泵恒流量控制系统主要由控制器、电动调节阀、离心泵和流量计组成[2]。流量给定值r(t)与离心泵流量的实际值y(t)相减,得误差信号e(t),误差信号经控制器计算后,再经数模转换输出模拟量给电动调节阀,调节阀以模拟量信号的值为依据,对离心泵出口阀的开度进行调节,进而实现对流量的调节。图1是离心泵控制系统结构图。
1.2控制系统数学模型
在该控制系统中,离心泵阀的控制和流体的传输模型可以近似看作一个一阶惯性环节加纯滞后环节,其传递函数为:
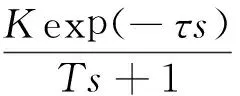
式中,K为系统的增益;τ是系统的纯滞后时间常数;T为惯性时间常量。根据该系统在实况下的运行状态分析计算,取K=1.38,T=1.02,τ=1.5.将参数代入式中可得近似的控制系统模型为:
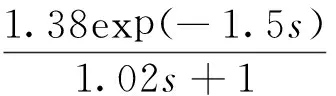
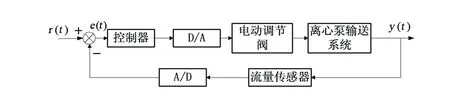
图1 离心泵控制系统结构图
2 模糊PID控制器
2.1模糊PID控制器的结构
模糊PID控制器由一个参数可调的PID调节器与模糊逻辑推理结合而成,利用模糊规则对流量误差e及其变化率ec进行模糊推理,得PID的调整增量分别为比例增量kp、积分增量ki、 微分增量kd,PID调节器根据调整后的参数处理后得出控制量给执行机构。控制器结构如图2所示。
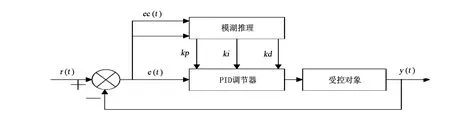
图2 模糊PID控制器结构
2.2模糊PID控制器设计
1)输入输出量的模糊化 通常模糊论域{-n,-n-1,…,-1,0,1,…,n-1,n}的n值越大,控制器的精度越高, 但模糊语言值也会增多,这会使得控制规则变得更复杂。因此,一般情况下,论域形式通常取n=6[3]。选取{-6~6}作为输入量误差e及其变化率ec的论域,输出量kp的论域取为{-0.01~0.01},ki的论域为{-0.16~0.16},kd为 {-0.01~0.01}。控制器的输入输出量偏差e、偏差变化率ec、比例系数kp、积分系数ki和微分系数kd的模糊子集都选择为7个,分别为{NB,NM,NS,ZO,PS,PM,PB},依次对应负大、负中、负小、零、正小、正中和正大。在选择隶属函数时,考虑到高斯型和双边型高斯隶属函数计算量很大,影响控制器的反应速度,因此输入输出量的隶属度函数均选择计算量相对更少,抗扰动能力较好的三角型隶属函数,输入输出量隶属度函数如图3~7所示。

图3 e的隶属度函数
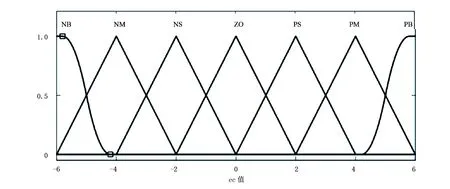
图4 ec的隶属度函数
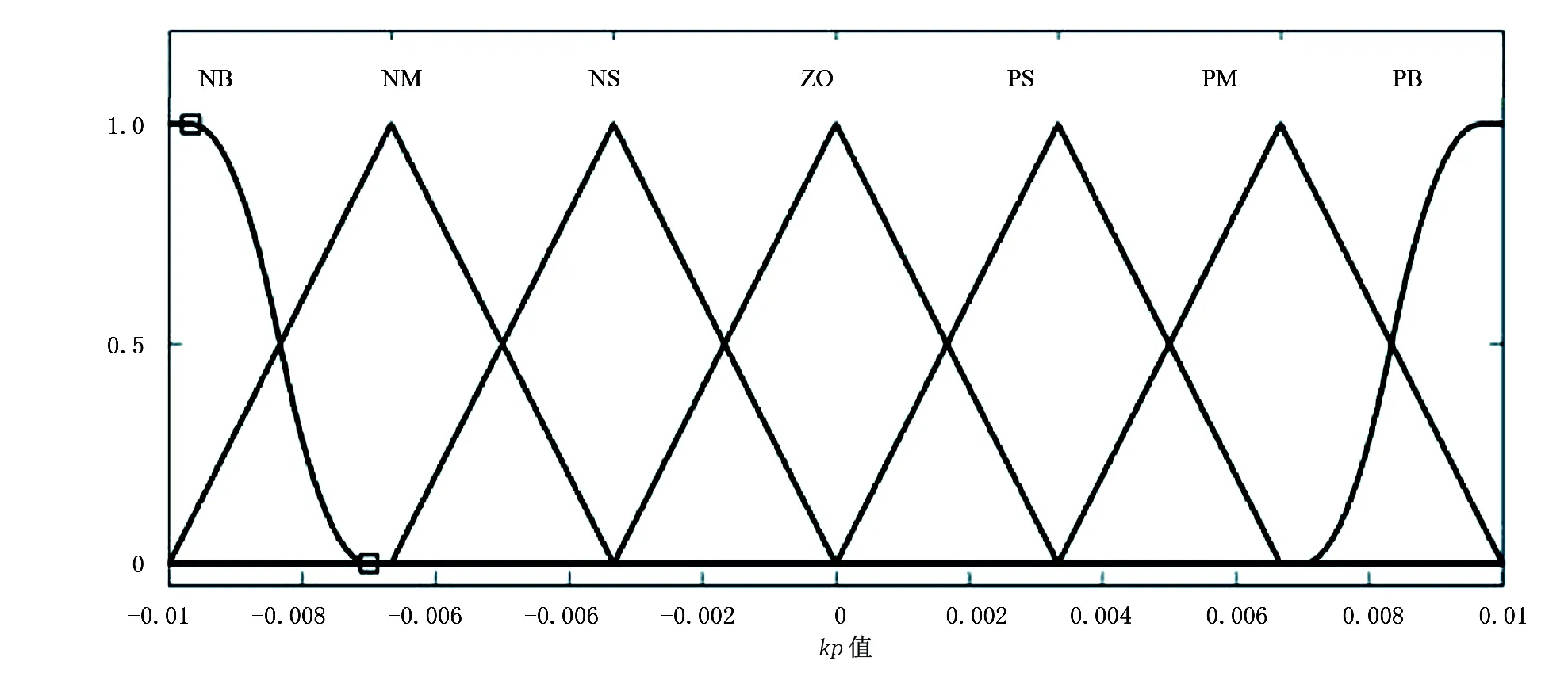
图5 kp的隶属度函数
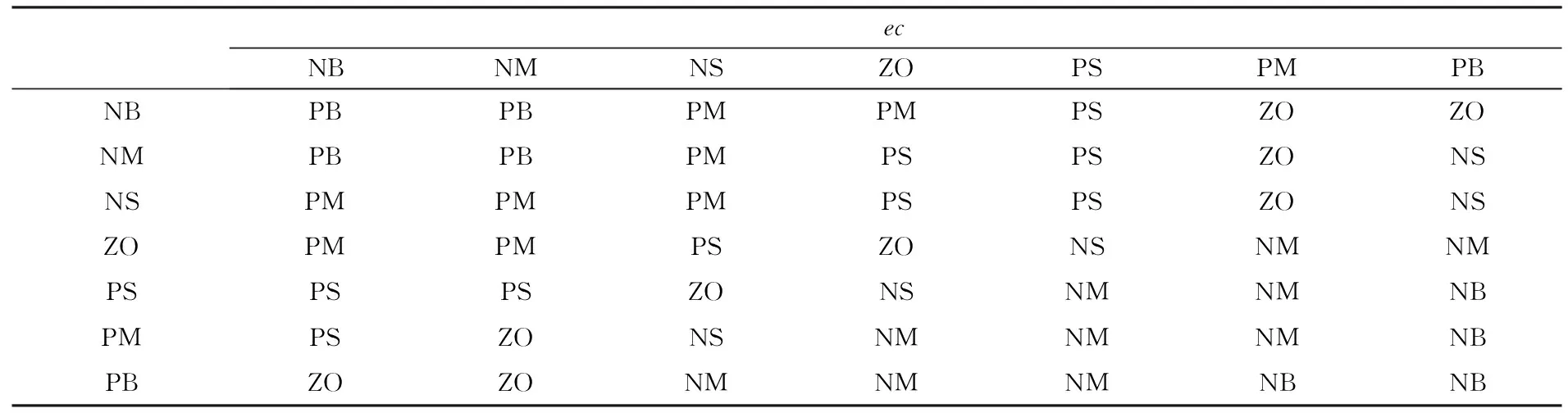
2)模糊控制规则表 合适的模糊规则表才能获得良好PID调整增量kp、ki、kd,达到优秀的控制效果,它的建立有赖于设计人员长期的实践经验总结[4]。调整增量的模糊规则表如表1~表3所示。
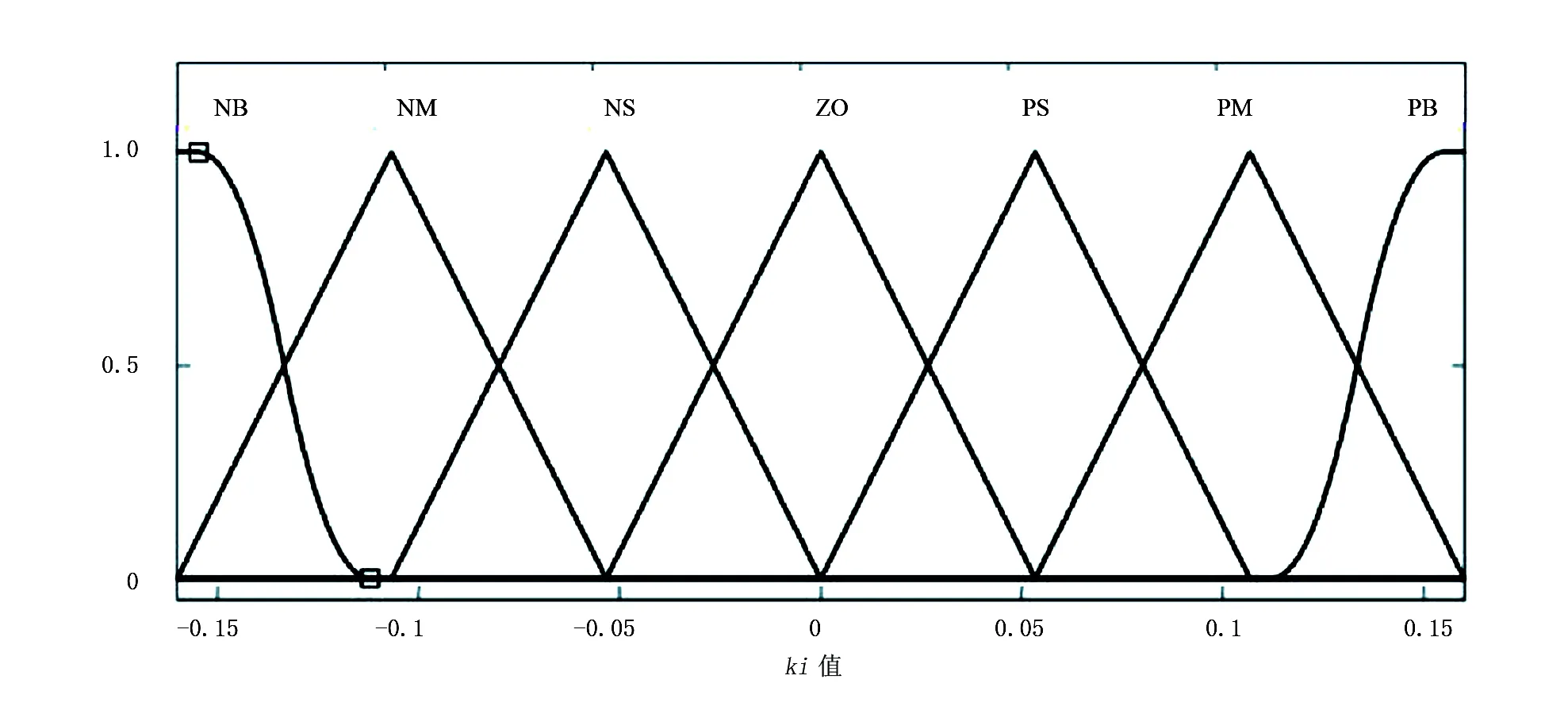
图6 ki的隶属度函数
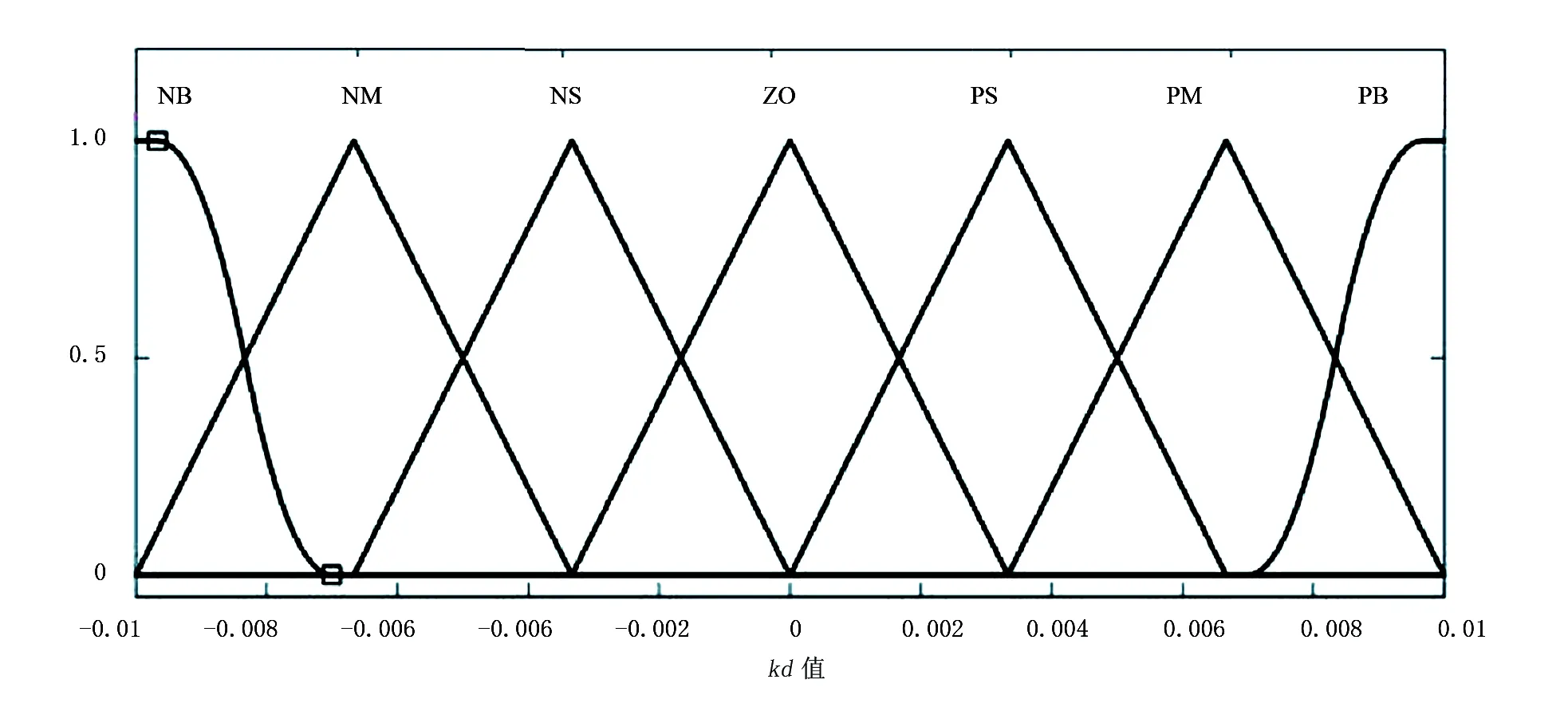
图7 kd的隶属度函数
ecNBNMNSZOPSPMPBNBPBPBPMPMPSZOZONMPBPBPMPSPSZONSNSPMPMPMPSPSZONSZOPMPMPSZONSNMNMPSPSPSZONSNMNMNBPMPSZONSNMNMNMNBPBZOZONMNMNMNBNB
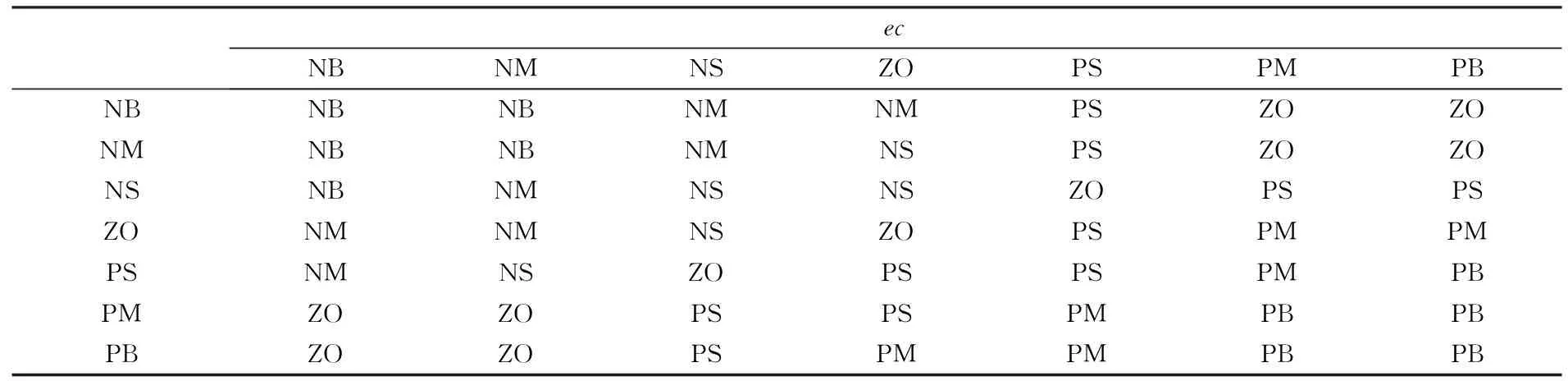
表2 ki的模糊规则表

表3 kd的模糊规则表
3 仿真程序设计
按照隶属度函数和模糊控制规则及PID控制原理,在MATLAB中设计了PID控制器和模糊PID控制器的Simulink对比程序,如图8所示。根据经验对常规PID参数进行凑试,得到PID控制器的参数分别为kp=0.3,ki=0.25,kd=0。
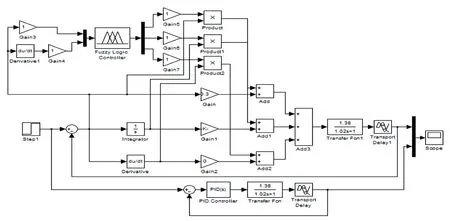
图8 常规PID和模糊PID控制器仿真对比程序
在Simulink中运行仿真程序,得到运行结果如图9所示。从仿真波形中可以看出在给定了阶跃扰动信号后,常规PID控制器需要10s左右时间达到稳定状态,有较小超调量,无稳态误差,控制效果较好;模糊PID控制器在扰动后6s左右基本达到稳定状态,并且无超调,无稳态误差,调节效果更好。
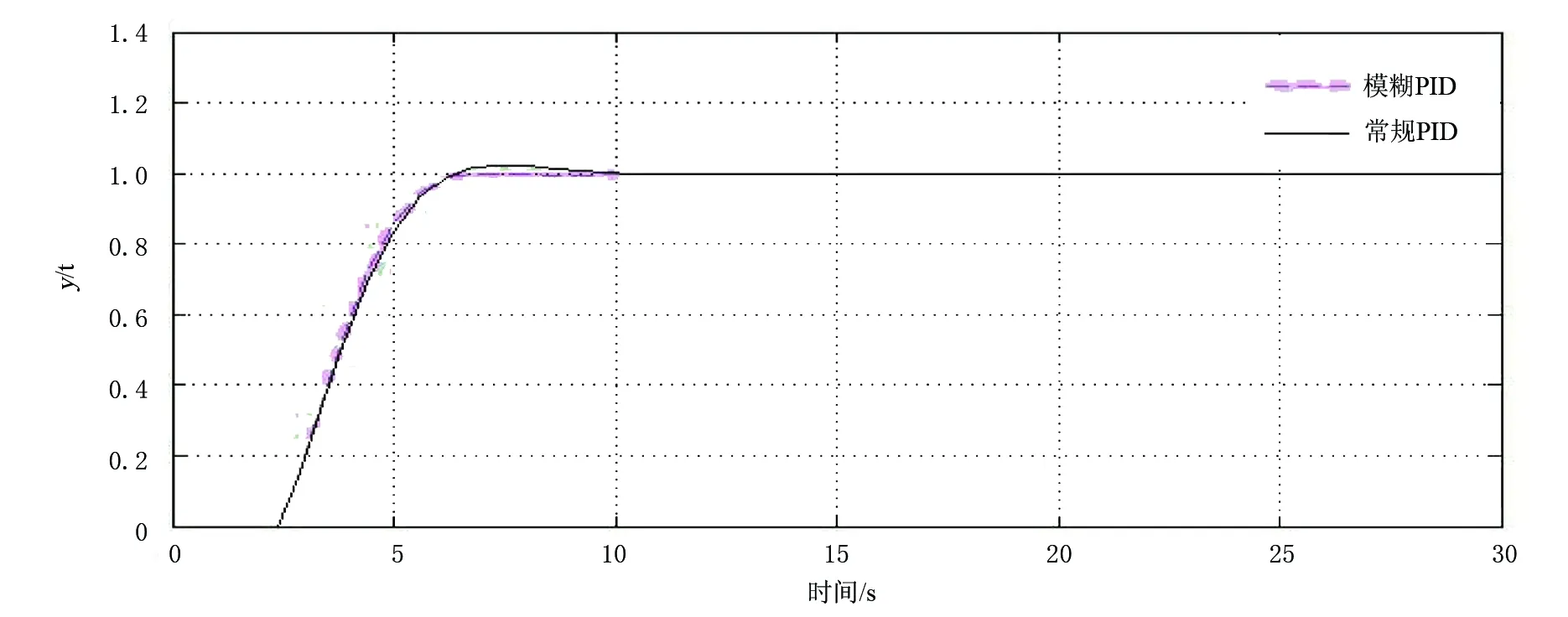
图9 仿真结果曲线对比
4 结语
通过以上2种控制算法的对比,可以看出在离心泵恒流量控制中,常规PID控制器可以实现无差调节,但是系统达到稳定前有超调量并且调节时间较长;而模糊PID控制器调节时间短,动态响应快,能迅速达到稳定状态,并且能够完全消除静态误差,抗扰动能力更强,对常规PID有较大优势。
[1]聂建英,于洋,罗雄麟. 离心泵变频控制对流量控制性能的影响分析[J].化工自动化及仪表,2013,5(4):485~489.
[2]陈明新,唐铃凤,胡建. 基于模糊PID控制的泵流量控制系统研究[J]. 新乡学院学报,2014(4):36~40.
[3]范子荣,张友鹏. 基于Matlab的自适应模糊PID控制器的设计[J]. 电气传动自动化,2006,28(3):11~13.
[4]黄友锐,曲立国.PID控制器参数整定与实现[M].北京:科学出版社,2010.
[编辑] 易国华
TP273.2
A
1673-1409(2017)17-0060-06
2017-04-10
冯山(1991-),男,硕士生,现主要从事计算机控制技术方面的研究工作,852571753@qq.com。
[引著格式]冯山.模糊PID在离心泵恒流量控制中的应用[J].长江大学学报(自科版), 2017,14(17):60~65.
