自适应调零GPS导航系统抗干扰性能仿真
2017-10-20杨明
杨 明
(中国人民解放军91404部队,河北 秦皇岛066001)
自适应调零GPS导航系统抗干扰性能仿真
杨 明
(中国人民解放军91404部队,河北 秦皇岛066001)
对自适应调零GPS导航系统的抗干扰性能进行了系统建模仿真与评估,此项抗干扰技术基于功率倒置算法。仿真结果表明,对于加装自适应调零装置的GPS导航系统,在抗干扰的过程中无需识别干扰信号来向,其抗干扰容限可达90 dB左右;对于干扰方,由于受功率、带宽的限制,单站压制式干扰的方式在实际工程中无法实现,对该系统的干扰必须采用多站干扰的方式来实现。
GPS;自适应调零;导航系统
0 引言
导航系统可以为各种交通工具提供准确的位置和路线信息,现代军事信息系统、各种武器平台也需要导航系统为其提供高精度的时间信息及定位服务,因此,导航系统在现代社会的应用越来越广泛。导航系统具有信号功率低、接收机易受干扰的特点;一旦各类导航机被干扰,轻则引起社会经济秩序发生紊乱,重则导致基础设施瘫痪;因此,有必要对导航接收机的抗干扰性能进行研究,自适应调零技术是目前广泛使用的一种导航抗干扰手段,本文对自适应调零GPS导航系统的抗干扰性能进行建模仿真与评估。
GPS导航接收机有多种抗干扰技术[1-3],主要从以下3方面进行研究:
① 基于硬件的抗干扰技术;
② 基于软件的抗干扰技术;
③ 基于组合导航的抗干扰技术。
基于硬件的抗干扰技术主要有2个途径:① 提高发射机的发射功率;② 提高接收机的灵敏度。提高发射功率会受到卫星功率限制,灵敏度的提高会增加接收机的复杂度,经济费用也会相应提高。基于软件的抗干扰技术主要是在中频信号处理时进行滤波,对于带内干扰一般采用频域滤波,对于带外干扰一般采用空域滤波,单纯的滤波往往不能满足系统抗干扰指标的要求。基于组合导航的抗干扰技术主要是在接收机受到电磁干扰时,系统切换为惯性制导,电磁干扰消失后,系统对卫星信号进行重新捕获。
各种抗干扰技术在公开发表的文献中已有详细介绍,本文重点对基于功率倒置算法的自适应调零技术进行建模分析,该技术具备不用提前识别干扰信号来向、可时时调节方向图指向等优点,采用该技术可大大提升导航接收机的抗干扰能力。
1 系统建模
自适应GPS导航接收机主要由天线阵列、调零信号处理模块和定位计算模块3部分组成,其原理如图1 所示。接收机工作时,调零信号处理模块通过调零反馈实时调节各路天线的衰减时延值,“衰减”指的是对信号的幅度进行调整,“延时”指的是对信号的相位进行调整,也即调节各路信号的权值,从而实时修正和优化天线阵的方向图,最终抑制干扰信号,提高输出信噪比。其所采用的算法为功率倒置算法,现对该算法进行详细推导与解释。
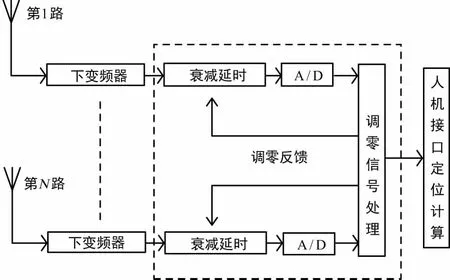
图1 自适应GPS导航接收机原理图
接收机的天线阵列有均匀线阵、圆阵及平面阵等多种形式;不失一般性,建模计算时可将不同天线阵列等效为相应的线阵,其天线接收模型如图2 所示。

图2 天线接收模型
天线接收模型中,假设每个天线相对于参考点的空间位置矢量为ri,天线来波方向为(θ,φ)。其中,θ为信号来波方向与z轴正向夹角,φ为来波方向在水平面上的投影与x轴正向的夹角。假设信号强度为Am,则参考天线收到的信号为:
x0=Amejωte-jkr0+rim⊥,
(1)
式中,rim⊥为第i个天线的方向矢量在第m个信号来波方向的投影;第i个天线收到的信号为x0=Amejωte-jkr0,对于第m个信号来说,第i个天线相对于参考天线的相位变化为e-jkrim⊥,k为空间波数,k=2π/λ,由此得出第m个信号的导向矢量为:
1,e-jkr1m⊥,…e-jkrN-1,m⊥T。
(2)
导向矢量的维数为N,该矢量乘上相应天线接收信号的强度,即是天线阵列的接收信号阵列。具体计算公式为:
rn,m⊥=rn·rm。
(3)
rn为由参考点指向第n个天线的空间矢量,rn=(xn,yn,zn);rm为第m个信号来波方向的方向矢量,rm=(sinθcosφ,sinθsinφ,cosθ);由上述分析可得天线阵列接收信号的计算公式如下:
(4)
简记为:X=AS,矩阵A的行数代表天线个数,列数代表仿真信号个数,包括正常信号与干扰信号。经过天线加权后,其输出为:
Y=WHX。
(5)
W为各个天线的加权系数,各种算法即是求最优加权系数解,最终目的是为了抑制干扰,提高输出信噪比。
功率倒置算法是一种基于线性约束最小方差准则的抗干扰算法,该算法直接将阵列输出信号的功率值作为优化函数,期望该值最小。该算法对正常导航信号及干扰信号均产生抑制,需要说明的是,自适应调零系统一般采用的是扩频的通信方式,因此,有用信号电平要远低于干扰信号,算法运算的结果是系统对干扰信号的抑制度将远远大于有用信号,其数学模型如下所述[4-7]。
算法优化目标是为了让天线阵输出功率最小,即:
minEY2。
(6)
同时,该天线阵列的输出还需遵守如下约束条件(保证优化后的权重系数不全为零):
(7)
式中,S0=1,0,…,维数为1×N,N为天线个数。计算时可构造拉格朗日函数:
LW=WHRxxW+λWTS0-1。
(8)
将L(W)看成W的曲面,则优化的过程相当于在找出这个曲面的最低点,并同时确定最低点所对应的Wopt,用最陡下降法来找出这个点,其迭代过程如下:
W(n+1)=W(n)-μwL(W(n)),
(9)
式中,μ用来控制搜索的步长。上式的物理意义就是沿着梯度的反方向来找最小的点,也就是沿着下降最快的方向在这个曲面上向下寻找最低点。经过一定的数学推导,可得最终迭代式为[8-10]:
(10)
自适应调零系统工作的数学基础即为式(10),在实际抗干扰过程中,系统实时进行优化计算,将最优解不断代入式(5),即可实现对干扰信号的抑制,保证系统正常工作,其仿真结果见下节内容。
2 仿真结果及性能评估
自适应GPS调零导航系统抗干扰性能的仿真基于以下假设:
① 有用信号来向:有用信号来向不能确定,且方向相对于接机可实时改变;
② 干扰方式:压制式干扰;
③ 干扰方向:干扰信号来向不确定;
④ 导航接收机基底噪声:约-103 dBm左右(该电平为调零成功后输出功率的收敛值)。
除去上节的数学推导,现对该算法进一步解释如下:
① 阵列天线的方向图为单个天线的方向图与阵因子相乘,天线硬件确定以后,单个天线的方向图已经确定,所以最终方向图与实际所选用天线的具体形式有关;
② 程序迭代优化的是阵列天线的阵因子,也就是说当某个方向有干扰时,阵因子会在该方向形成凹陷;
③ 自适应调零导航系统在工作过程中无需测向;
④ 功率倒置算法优化的直接目标是天线阵的输出功率,方向图的凹陷是其表现,其干扰抑制度计算时的基准是正常GPS导航信号功率电平,约为-130 dBm;
⑤ 干扰源的个数不能大于天线个数,否则调零机制失去应用的功能。
基于前文的数学推导及分析,现给出仿真结果并对此进行分析,本文计算时所用示例为四天线阵,单元天线距离为0.4个波长,天线阵的形式如图3 所示。图3同时显示,经过不到20次优化迭代,调零机制即可起到抑制效果。该迭代速度与数据处理速度有关,一般该速度较快,远大于功放反应速度,仿真显示如果干扰源为闪烁式干扰,并不会对调零效果有较大影响。
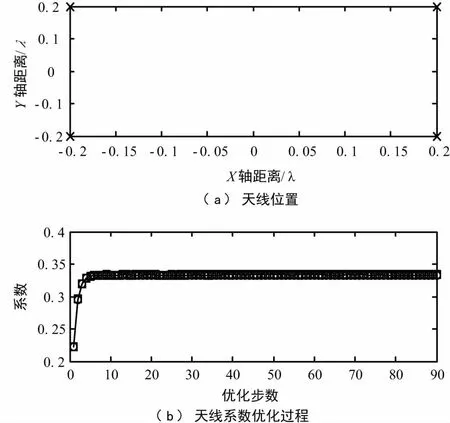
图3 天线阵列形式及系数优化过程
仿真计算时,主要参数设置如下:
① 正常信号方向,方位与俯仰角分别为(0°,0°)(30°,68°);
② 正常信号功率-130 dBm;
③ 接收机基底噪声-100 dBm;
④ 干扰信号方向,方位与俯仰角分别为(0°,45°)(230°,60°);
⑤ 干扰信号功率-70 dBm、-60 dBm。
接收机基底噪声及其输出功率如图4 所示。
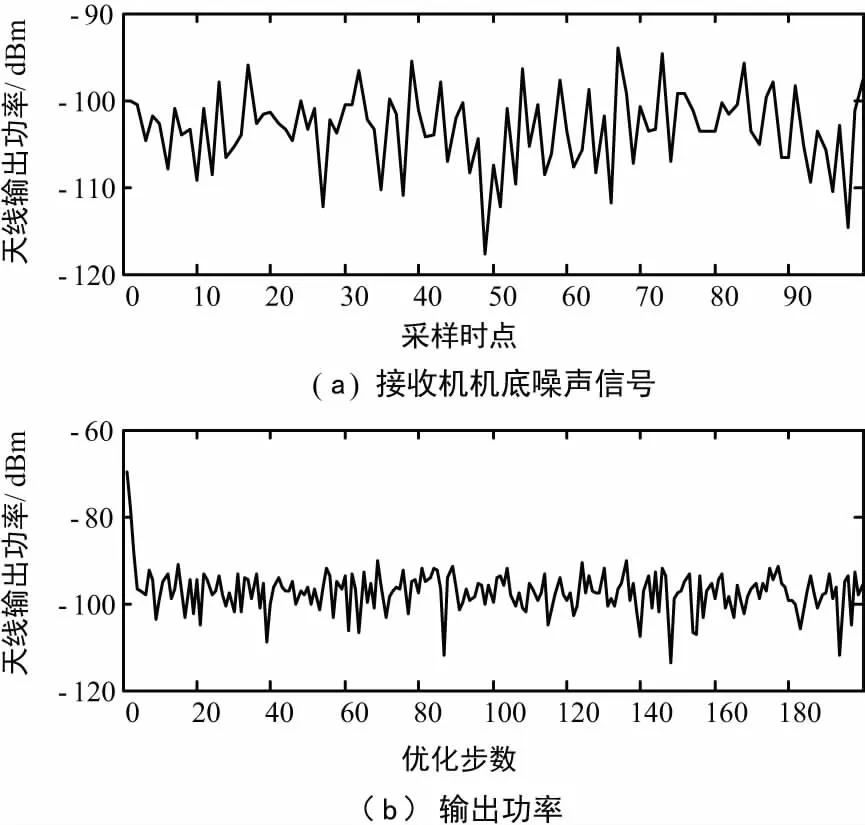
图4 自适应调零后接收机输出
调零成功后,接收机输出功率将被控制在基底噪声附近,经过后续的扩频处理,接收机可正常工作。在所用器件无误差情况下,在干扰源个数小于天数的情况下,仿真结果显示,无论干扰功率多强,接收机输出的功率均被控制在基底噪声附近;该结果表明,采用单站的方式来干扰加装自适应调零设备的GPS导航接收机在实际工程中无法实现。
图5 为有干扰情况下俯仰面的方向图(方位角70°平面的方向图,干扰俯仰76°),观察可发现,在有干扰的情况下,天线阵列的方向图会发生畸变,在相应干扰方向上形成凹陷,凹陷个数与干扰个数相同。

图5 有干扰情况下俯仰面的方向图
为了更加真实地反应自适应调零GPS导航系统在实际工程中的性能,仿真进一步将硬件误差考虑进去,主要是衰减移相器的误差,硬件有误差的仿真结果如图6 所示。

图6 硬件有误差情况下接收机输出功率
结果显示,在所有硬件为理想器件的情况下,无论干扰功率多大,调零机制均可起作用,其输出功率可被控制在基底噪声附近,如果硬件有一定的误差,比如相位误差、增益误差等,则当到达接收机处的干扰达到-60 dBm时,接收机输出功率会相应增加,考虑到接收机后续的扩频处理,其抗干扰容限可达90 dB;此时,实际干扰机的发射功率已经相当大,在实际工程中实现很难。
3 结束语
基于全文数学分析与仿真结果,针对自适应调零导航系统抗干扰性能可得出如下评估结论:
① 自适应GPS调零导航系统在工作时无需识别干扰信号来向,其优化的直接目标是接收机的输出功率;
② 系统通过实时调节各个天线的权值来抑制干扰,也即自适应GPS调零导航系统在工作时其方向图中的阵因子在实时改变;
③ 理想情况下,调零GPS导航接收机可将接收机的输出功率控制在基底噪声附近;考虑到接收机所用硬件在实际工程中有误差,则干扰功率达到一定域值后,接收机输出信号功率会增加;
④ 自适应调零技术与扩频通信技术同时使用,使得GPS导航接收机的抗干扰容限可达90 dB;仿真结果显示,采用单站干扰的方式很难在实际工程中有实际效果,必须采用多站干扰方式进行干扰。
[1] 王沛.基于自适应天线的导航抗干扰算法研究[D].西安:西安电子科技大学,2014.
[2] 李滢昕.基于FPGA的导航抗干扰接收机数字变频的设计与实现[D].西安:西安电子科技大学,2014.
[3] 刘建业.导航系统理论与应用[M].西安:西北工业大学出版社.2010.
[4] Fante R L,Vaccaro J J.Wideband Cancellation of Interference in a GPS Receive Array[J].IEEE Transactionson Aerospace & Electronic Systems,2000,36(2):549-564.
[5] 梁翠兰.自适应零陷天线GPS接收机干扰技术研究[D].西安:西安电子科技大学,2011.
[6] 徐晓强.自适应抗干扰调零天线[D].成都:电子科技大学,2008.
[7] 杜谦.GPS系统的电子侦察和干扰技术研究[J].无线电工程,2005,35(11):32-34.
[8] 钮心忻.软件无线电技术与应用[M].北京:北京邮电学院出版社,2000.
[9] 张贤达,保铮.通信信号处理[M].北京:国防工业出版社,2000.
[10] 何宾.FPGA 数字信号处理实现原理及方法[M].北京:清华大学出版社,2010.
SimulationandEvaluationofAnti-jammingPerformanceofGPSNavigationSystemwithAdaptiveNulling
YANG Ming
(Unit 91404,PLA,Qinghuangdao Hebei 066001,China)
The anti-jamming performance of GPS navigation system with adaptive nulling based on inverted power algorithm is evaluated by simulation.Simulation results show that the anti-jamming tolerance of GPS navigation system with adaptive nulling can be 90 dB and the system can resist jamming without knowing signal direction.To disrupt the GPS navigation system with adaptive nulling,high power jamming from a single station can not work in the engineering due to limitation of power and bandwidth,and multi-station jamming has to be used.
GPS;adaptive nulling;navigation system
P228.4
A
1003-3114(2017)06-60-4
10.3969/j.issn.1003-3114.2017.06.15
杨明.自适应调零GPS导航系统抗干扰性能仿真[J].无线电通信技术,2017,43(6):60-63.
[YANG Ming.Simulation and Evaluation of Anti-jamming Performance of GPS Navigation System with Adaptive Nulling[J].Radio Communications Technology,2017,43(6):60-63.]
2017-08-21
杨 明(1975—),男,高级工程师,主要研究方向:通信与通信对抗技术。
