基于模糊Petri网的卫星导航接收系统故障诊断
2017-10-18於拯威
赵 佳, 吕 弘, 刘 宝, 於拯威
(南京模拟技术研究所, 江苏 南京 210016)
基于模糊Petri网的卫星导航接收系统故障诊断
赵 佳, 吕 弘, 刘 宝, 於拯威
(南京模拟技术研究所, 江苏 南京 210016)
针对卫星导航接收系统的动态故障诊断问题, 提出基于模糊Petri网的故障诊断方法. 在分析卫星导航接收系统的故障机理和失效特征的基础上, 根据故障模式的重要度, 获取输入库所的相应权值, 然后利用模糊Petri网对卫星接收系统的故障进行动态诊断. 该方法既解决了输入库所的权重精确性问题, 又充分利用了模糊Petri网的动态诊断过程, 提高了故障定位的准确性. 仿真和试验结果表明该方法有效, 且具有较强的通用性和工程应用价值.
模糊Petri网; 故障诊断; 卫星导航接收系统; 故障模式重要度
Abstract: In need of dynamic fault diagnosis for GNSS receiver, Fuzzy Petri Net was proposed. Based on the analysis of the fault mechanism and failure characteristics, the corresponding different weights of Fuzzy Petri Net input arcs were assigned according to fault pattern importance. The dynamic fault diagnosis for GNSS receiver was carried out by using the Fuzzy Petri Net. The method not only solved the accuracy of input arcs, but also made full use of the dynamic diagnosis process of the Fuzzy Petri Net with the fault position correctness improved. Simulation and testing results show that the method was effective and useful in engineering.
Keywords: Fuzzy Petri net; fault diagnosis; GNSS receiver; importance of failure mode
0 引 言
无人直升机具备突出的悬停、 低空低速和良好的机动性能[1-3], 可以长时间在特定区域进行监控、 取样、 探测、 中继等活动. 因此, 随着航空科学技术的发展, 无人直升机技术受到越来越多的关注, 并被应用到地理监测、 森林防火、 军事演习等诸多领域, 并携带越来越多技术先进、 功能全面、 品质优良的高端设备. 这些设备既有保证飞行安全的传感、 控制、 链路设备, 也有为实现任务的载荷设备. 这些设备在提高无人直升机系统性能和任务有效性的同时, 也带来了系统结构的复杂化, 导致其故障率相应增加, 给系统的测试、 维护和保障带来不少的问题. 任何存在而又不能被及时发现的隐藏故障状态, 如果不能得到及时纠正, 都会成为无人直升机系统不可靠度的一部分.
卫星导航接收系统(Global Navigation Satellite System Receiver, GNSS Receiver)作为无人直升机的重要机载传感设备之一, 为直升机提供精确的位置、 速度信息, 其可靠性直接关系到飞机是否能够实现安全起降和飞行. 因此, 一旦出现故障, 了解其故障的动态传递过程, 对其隐形的故障进行准确的诊断和定位, 使无人直升机能够及时启动备用传感设备, 实现安全返航和事后维修等等都有重要的作用. 因而, 研究该设备的准确、 快速的自动故障诊断技术显得尤为重要.
Petri网理论[4]作为人工智能故障诊断技术, 非常适合描述并列、 次序发生的故障动态演变过程, 为提高系统的容错性, 不少学者将模糊理论[5]和Petri网结合, 对规则、 变迁置信度等进行了模糊化, 并在多个领域尤其是电力领域的故障诊断方面, 获得了较为广泛的运用[6-13], 但在其它领域的故障诊断中应用较少.
鉴于此, 本文在分析卫星导航接收系统的故障机理和失效特征的基础上, 根据故障模式的重要度程度, 获取输入库所的相应权值, 然后利用模糊Petri网对卫星接收系统的故障进行动态诊断, 有效解决了输入库权值的精确性问题, 提高了算法的适应性, 对故障的快速定位提供依据. 仿真和试验结果验证了该方法的有效性.
1 卫星导航接收系统故障分析及故障模式重要度获取
1.1 故障分析
卫星导航接收系统通过通信接口, 采用不同标识的报文对外输出各类数据, 其典型故障之间的关系如图 1 所示.
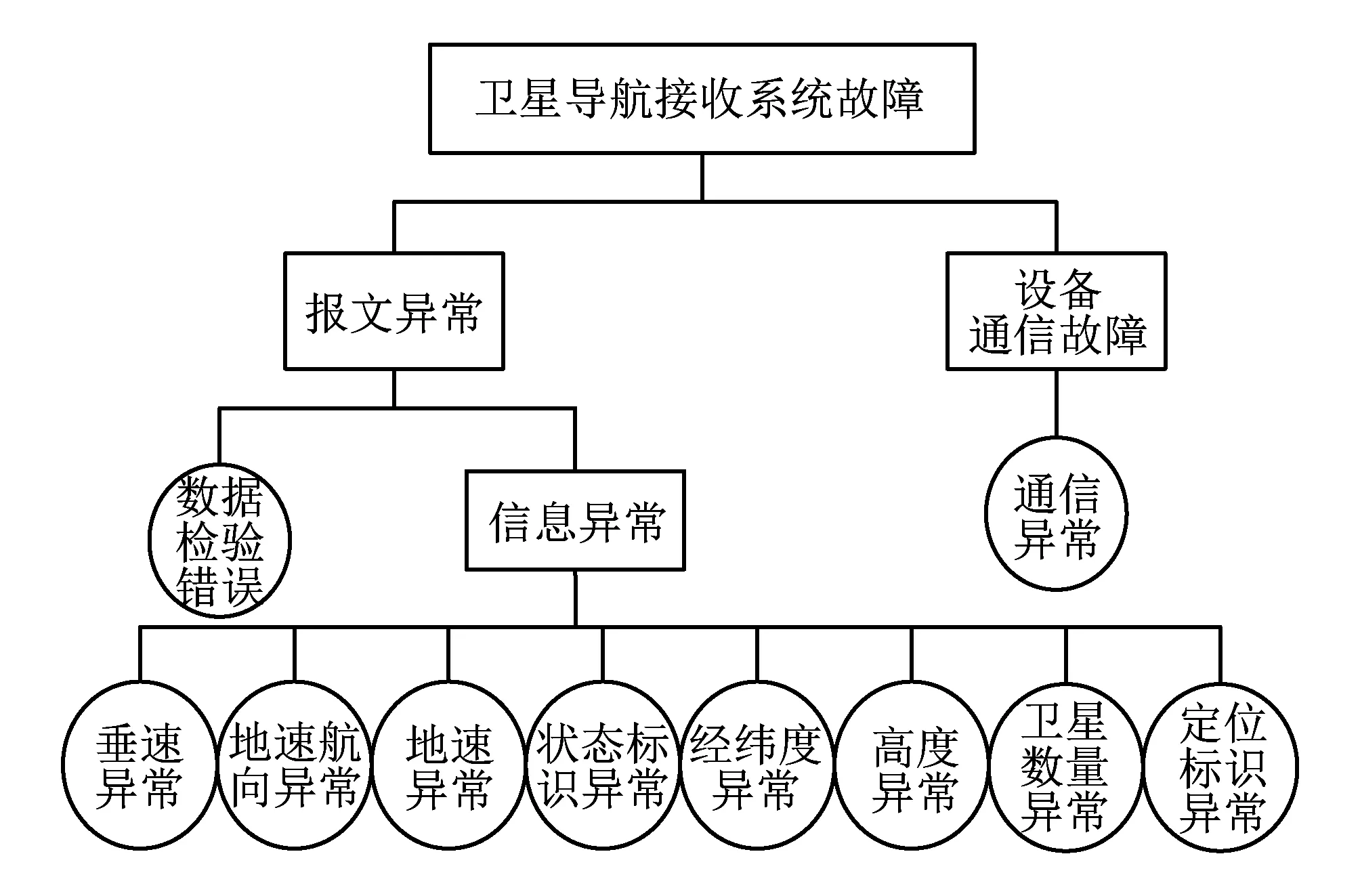
图 1 卫星导航接收系统故障关系Fig.1 GNSS receiver fault relationship
图 1 中, 卫星导航接收系统的故障主要分为通信故障和报文异常. 通信故障包含通信接口有关的所有硬件和接口故障. 报文异常可分为报文数据校验异常、 数据信息异常. 数据信息异常又可分为定位标识异常、 时间异常、 经纬度异常、 高度异常、 地速异常、 地速航向异常、 垂速异常. 根据导航卫星系统定位、 定时的基本原理[11], 卫星导航接收系统定位方式为以位置解算为基本, 其他信息在此基础上获取. 位置解算需一定数量的卫星, 卫星数量过少将直接导致经纬度数据异常, 同时导致其他数据异常. 但卫星数量过少并不一定是卫星导航接收系统内部故障引起, 也可能是使用条件未满足要求. 因此, 研究卫星导航接收系统故障以搜索到的卫星数量满足解算要求为前提. 然而, 地速还可以通过多普勒频移值获得, 对经纬度和卫星数量的依赖度略低. 为了更清晰地表达卫星导航接收系统各故障模式的重要程度, 根据是否对飞行安全有影响, 将故障模式引起后果的严重程度分为高、 中、 低3类, 并列于表 1.
表 1 中, 重要程度“高”, 表示发生此类故障将影响飞行安全; 重要程度“中”, 表示此类故障可能会影响飞行安全, 但可以由其它传感设备的数据替代或者可以通过其它数据解算获取; 重要程度“低”, 表示此类故障一般不影响飞行安全, 或可以通过其他数据解算获取.

表 1 故障模式与严重程度
1.2 故障模式重要度的获取
为充分利用现有故障分析方法, 将故障树的定量分析方法引入本文, 用于计算故障模式的重要度. 根据容斥定理, 故障发生概率的计算公式为

式中:Q为系统故障发生概率;Kn为第n个最小割集发生的概率.
结构重要度计算公式描述为

概率重要度计算公式为
式中:Ii为第i个故障模式的概率重要度;qi为第i个故障模式发生的概率.
关键重要度计算公式为
式中:IIi为第i个故障模式的关键重要度, 用于计算库所的输入权值.
2 模糊Petri网故障诊断原理
模糊Petri网故障诊断, 其基本结构如图 2 所示, 可定义为一个8元组[4,6,9,12]

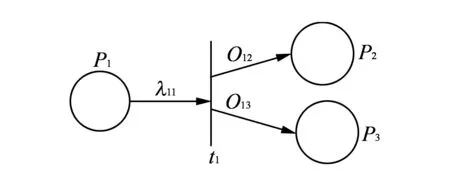
图 2 模糊Petri网故障诊断的基本模型Fig.2 The basic fuzzy Petri net model
式中:P={p1,p2,…,pn}为库所的集合, 即故障模式集合;T={t1,t2,…,tn}为变迁的集合, 即故障传递路径节点;C∶P→T为关联矩阵, 用于描述网络的拓扑结构, 即故障模式和故障传递路径节点之间的关系. 当库所pi指向变迁tj, 则cij=-1; 当变迁tj指向库所pi, 则cij=1; 无联系, 则cij=0.;I∶P→T为库所到变迁的输入权值矩阵,I=[λij],λij=[0,1].O∶T→P为变迁到库所的输出权值矩阵,O=[Oij],oij∈[0,1].F={fin,fout}, 为变迁处理函数集合;fin=cij*λij, 用于计算变迁的输入概率;fout=cij*oij, 用于计算变迁的输出概率.Tλ为变迁阈值, 用于判断变迁是否激发的门限值.
模糊Petri网的诊断过程为: ① 利用故障分析方法, 并结合实际工程经验, 获取故障模式重要度定量数据; ② 根据重要度的不同, 对相应库所的权重进行赋值; ③ 计算各变迁的输入概率, 并判断变迁是否发生; ④ 求取输出概率, 并计算下一个库所的概率, 直至终止库所, 当最终库所中概率大于某一数值时, 则判断库所对应的故障模式为真实故障.
3 实例验证
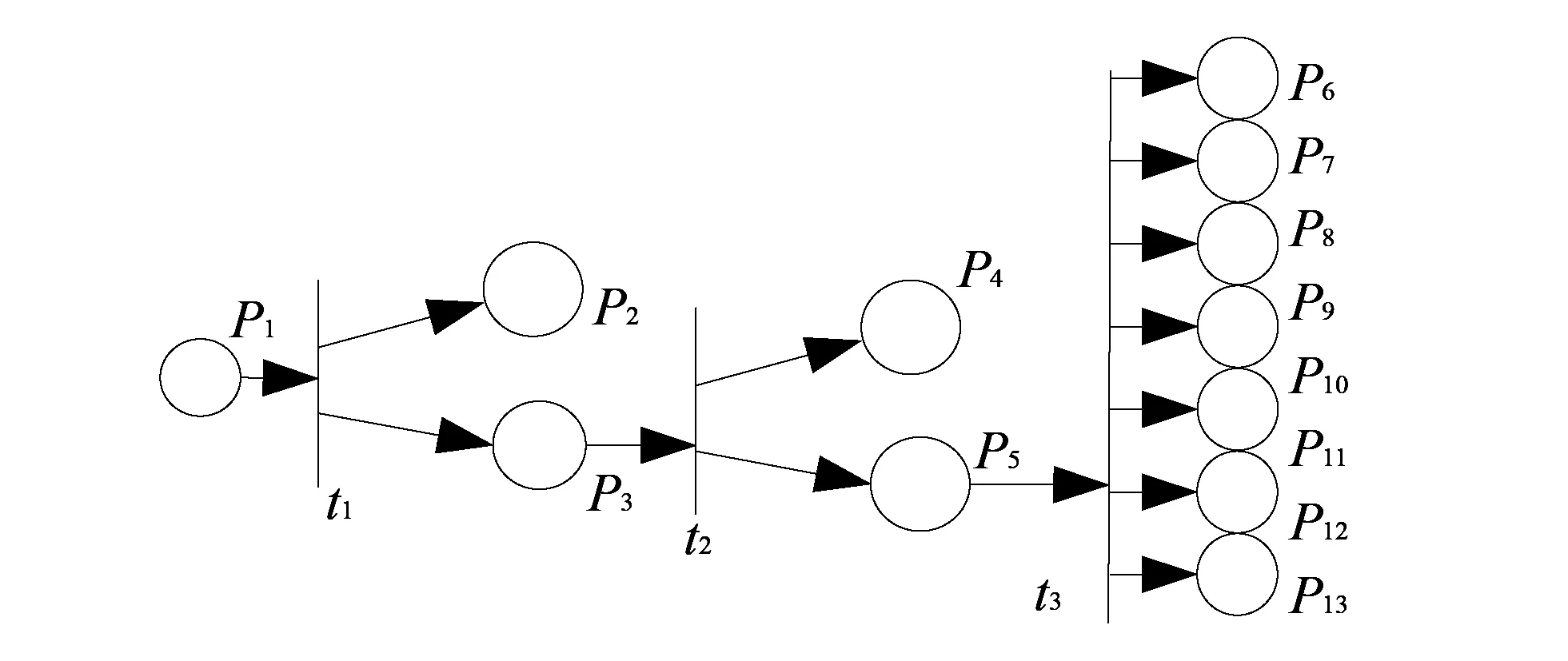
图 3 卫星导航接收系统的故障诊断模型Fig.3 GNSS receiver Fault diagnosis model
某型无人直升机配备的卫星导航接收系统, 故障关系如图 1 所示, 可得其模糊Petri网故障诊断的模型如图 3 所示. 图3中,P1代表卫星导航接收机系统故障;P2代表设备通信故障和通信异常;P3代表报文异常;P4代表数据校验错误;P5代表信息异常;P6~P13依次代表定位标识异常、 卫星数量异常、 高度异常、 经纬度异常、 状态标识异常、 地速异常、 地速航向异常、 垂速异常.
由分析可得, 卫星导航接收系统的最小割集与故障模式一致. 根据实际应用经验, 各故障模式发生的概率为
K={0.001,0.003,0.002,0.002,0.002,0.005,0.002,0.004,0.002,0.002}
由此可得各最小割集结构重要度, 则库所输入权值和输出权值, 具体如图 4 所示.
其中:P6~P13的输入权重分别为: 0.095,0.095,0.095,0.240,0.095,0.190,0.095,0.095.

图 4 库所输入输出权值Fig.4 Different weights of input and output arcs
卫星导航接收系统的模糊Petri网诊断过程中, 各库所的重要度归一化分布如图 5 所示. 由图 5 可知, 对于卫星导航接收系统, 报文异常为关键故障, 信息异常为关键库所, 即关键故障, 但两者为中间故障. 因此对于最终故障模式中, 经纬度异常P9的重要度最高, 表明在所有故障模式中, 此故障为关键故障, 结合表1, 此故障发生时, 对飞行安全影响程度高, 需重点关注.
当系统故障发生时, 通过模糊Petri网进行故障定位, 若假设P0=[1,0,0,0,0,0,0,0,0,0,0,0,0]T, 且点火都发生, 由图 6 清晰可得故障的动态定位过程, 最终的定位结果也为P9, 即经纬度异常, 表明该方法有效.
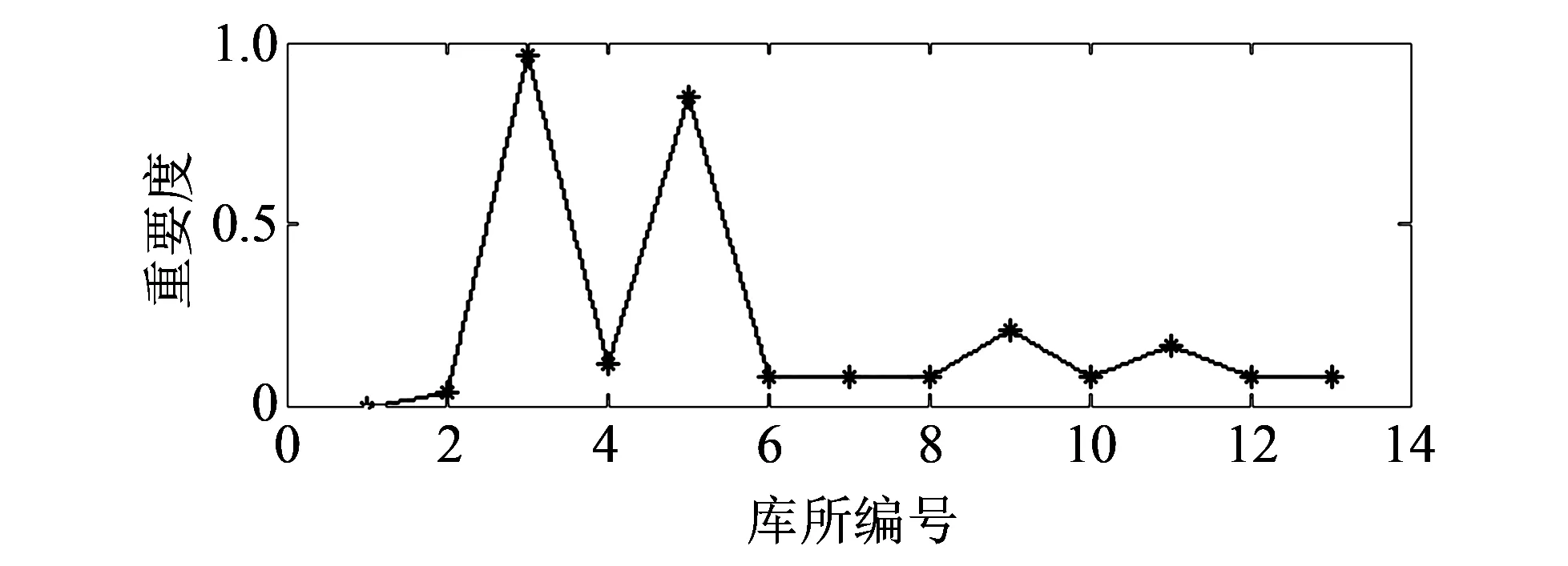
图 5 库所重要度分布Fig.5 Pattern importance distribution of net places
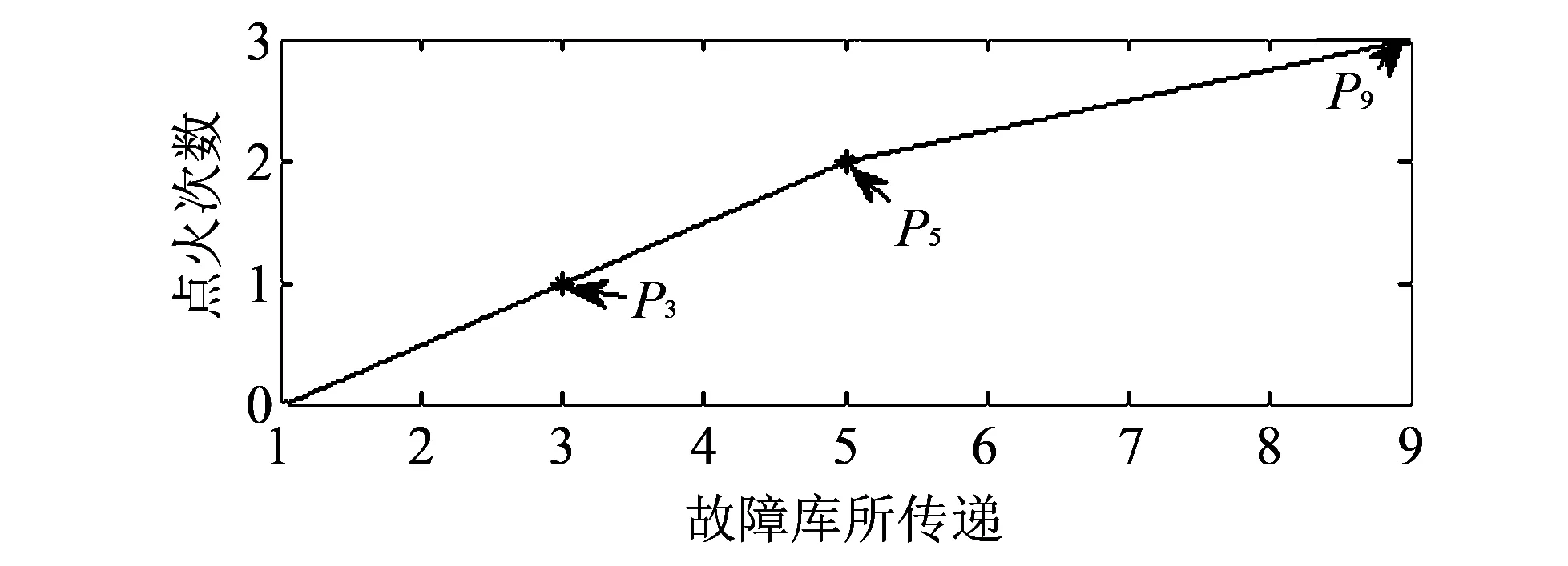
图 6 故障的动态定位过程Fig.6 The dynamic process of fault diagnosis
4 结 论
本文分析了卫星导航接收系统的故障机理和失效特征. 根据对应故障模式的重要度程度, 获取输入库所的相应权值,并利用模糊Petri网对卫星接收系统的故障进行动态诊断, 解决了输入库权值的精确性问题, 提高了算法的适应性, 且为故障的快速定位提供方法. 仿真和试验结果验证了该方法的有效性.
下一步的研究工作, 将考虑此方法应用于小型无人直升机其他传感器故障定位的效果.
[1] 吴希明. 高速直升机发展现状、 趋势与对策[J]. 南京航空航天大学学报, 2015, 47(2): 173-179. Wu Ximing. Current status, development trend and countermeasure for high-speed rotorcaft[J]. Journal of Nanjing University of Aeronautics &Astronautics, 2015, 47(2): 173-179. (in Chinese)
[2] Azzam A,Wang Xinhua. Quad rotor arial robot dynamic modeling and configuration stabilization[C]. The 2nd International Asia Conference on Informatics in Control, Automation and Robotics. Wuhan, China,2010: 438-444.
[3] David L, Anand S, Rogelio L. Real-time embedded control system for VTOL aircrafts: application to stabilize a quad-rotor helicopter[C]. The 45th IEEE Conference on Decision & Control. Munich, Germany, 2006: 4351-4356.
[4] Xu Luo, Kezunovic M.Implementing fuzzy reasoning Petri-nets for fault section estimation[J].IEEE Trans on Power Delivery, 2008, 23(2): 676-685.
[5] LI Xiaoou, Lara-Rosano F. Dynamic knowledge inference and learning under adaptive fuzzy net framework[J]. IEEE Trans on Systems, Man, and Cybernetics: Part C Application and Reviews, 2008, 30(4): 442-450.
[6] 谢红涛, 童晓阳. 基于分层模糊Petri网的电网故障综合诊断方法[J]. 电网技术, 2012, 36(1): 248-251. Xie Hongtao, Tong Xiaoyang. A method of synthetical fault diagnosis for power system based on fuzzy hierarchical petri net[J]. Power System Technology, 2012, 36(1): 248-251 . (in Chinese)
[7] Sun Jin, Qin Shiyin, Song Yonghua. Fault diagnosis of electric power systems based on fuzzy Petri nets[J]. IEEE Trans on Power System, 2004, 19(1): 2053-2059.
[8] 吴双, 何正友, 钱澄浩, 等. 模糊Petri网在高速铁路牵引供电系统故障诊断中的应用[J]. 电网技术, 2011, 35(9): 79-85. Wu Shuang, He Zhengyou, Qian Chenghao, et al. Application of fuzzy Petri net in fault diagnosis of traction power supply system for high-speed railway[J]. Power System Technology, 2011, 35(9): 79-85 . (in Chinese)
[9] 王磊, 陈青, 高湛军. 输电网故障诊断的知识表示方法及其应用[J]. 中国电机工程学报, 2012, 32(4): 85-92. Wang Lei, Chen Qing, Gao Zhanjun. Representation and application of fault diagnosis knowledge in power transmission grids[J]. Proceeding of the CSEE, 2012,32(4): 85-92. (in Chinese)
[10] 毕天姝, 杨春发, 黄少锋, 等. 基于改进Petri网模型的电网故障诊断方法[J]. 电网技术, 2005, 29(21): 53-56. Bi Tianshu, Yang Chunfa, Huang Shaofeng, et al. Improved petri net models based fault diagnosis approach for power networks[J]. Power System Technology, 2005, 32(4): 79-85. (in Chinese)
[11] 杨健维, 何正友. 基于时序模糊Petri网的电力系统故障诊断[J]. 电力系统自动化, 2011, 35(15): 46-51. Yang Jianwei, He Zhengyou. Power system fault diagnosis approach based on time sequence fuzzy Petri net[J]. Automation of Electric Power Systems, 2011,35(15): 46-51. (in Chinese)
[12] Chen S M.Weighted fuzzy reasoning using weighted fuzzy Petri nets[J].IEEE Trans on Knowledge and Data Engineering, 2002, 14(2): 386-397.
[13] 谢敏, 吴亚雄, 闫圆圆, 等. 基于改进动态自适应模糊Petri网与BP算法的电网故障诊断[J]. 中国电机工程学报, 2015,35(12): 3008-3017. Xie Min, Wu Yaxiong, Yan Yuanyuan, et al. Power system fault diagnosis based on improved dynamic adaptive fuzzy Petri nets and back propagation algorithm[J]. Proceeding of the CSEE, 2015, 35(12): 3008-3017. (in Chinese).
FaultDiagnosisforGNSSReceiverBasedonFuzzyPetriNet
ZHAO Jia, LÜ Hong, LIU Bao, YU Zhengwei
(Nanjing Research Institute on Simulation Technique, Nanjing, 210016, China)
1671-7449(2017)05-0438-05
TM93
A
10.3969/j.issn.1671-7449.2017.05.012
2017-03-22
国家高科技研究发展计划(863计划)资助项目(2014AA09A511)
赵 佳(1981-), 男, 工程师, 博士, 主要从事无人直升机导航与飞行控制技术等研究.