电动转矩定向差速器的特性分析
2017-10-18李靖王梅
李 靖 王 梅
(辽宁省交通高等专科学校,辽宁 沈阳 110122)
电动转矩定向差速器的特性分析
李 靖 王 梅
(辽宁省交通高等专科学校,辽宁 沈阳 110122)
近年来,由于电动转矩定向差速器在转矩定向方面的应用越来越广,电动转矩定向差速器成为研究的热点,但是针对电动转矩定向差速器的机构设计及其特性分析还需进一步的研究。本文采用速度图法表示出最简单的电动转矩定向差速器机构的所有类型,分析了各构型中各构件间的转速和转矩的关系。通过对各构型中需求的电机转速、电机转矩放大系数G的对比分析筛选出较优的构型。
转矩定向;速度图法;行星排
1 引言
直接横摆控制系统早在1993年就已经提出了,Shibahata等[1]提出的定向偏转力矩控制采用合理分配左右车轮的牵引力和制动力可改善车辆的可操纵性。Motoyama[2]建造一可控各车轮牵引力的四轮车辆证明侧向牵引力分配的影响。直接横摆控制系统主要是利用侧面制动力和牵引力来改善车辆驱动稳定性。但是制动力会使得车辆车速降低、能量损耗。侧向牵引力分配系统虽然可以减少能量损失,但是发动机提供的驱动转矩限制了汽车的侧滑转矩。
为改善车辆在各种工况下的稳定性,在1995年Ikushima和Sawase[3]提出了新的定向偏转转矩结构,即利用在左右车轮间安装转矩传送装置来实现转矩的定向分配。与传统的扭矩定向差速器不同的是,侧面转矩定向差速器工作时,不仅不会影响到车辆的减速、加速,而且它还可以有效的预防车辆的不足转向,增强了车辆的安全性和动力性[4]。同时,相应的直接摇摆控制系统已经被研制出来[5]。应用在电动车上的侧面转矩系统可以大致分为两类:一类是在每个车轮上都安装一个电机,通过控制每个电机来实现定向横摆控制。但是,这会使得产生横摆控制能力随着驱动力矩的增加而减小。另一类是通过一个复杂的扭矩定向机构即侧面转矩定向差速器来实现的,这个机构包括齿轮机构和一个电机,而这个电机只会控制左右车轮的扭矩的分配。因此,对电动转矩定向差速器扭矩分配及其特性的分析就显示十分必要。
Ch.Wirth等[6]主要对齿轮箱进行建模分析并且给出了几种齿轮箱的结构;Hoehn等[7]针对装有电动转矩定向差速器的电动车进行了建模分析以及齿轮机构的效率计算,没有给出一个普遍适用的规律;Kaoru Sawase[8]对电动转矩定向差速器进了分类分析,得出了最简单构型为五构件二自由度机构,并且依据分析结果选出最优的结构方案,但是其并没有给出每种方案的实现形式,而且转矩定向时的各构型的特性规律还有待进一步的研究。
本文的目的是进一步对电动转矩定向差速器的特性进行研究。第一,通过对五构件二自由度机构进行分析后用速度图法[9]画出可能构型,并且画出每种构型的运动简图;第二,用速度图法对给出的各构型进行转速、转矩分析,给出电机转矩的表达方式;第三,通过对比分析各构型的转矩放大系数、需求电机转速后得出优选构型。
本文针对电动转矩定向差速器的研究满足以下条件:
(1)电机独立于驱动系统控制左右车轮的转矩,在电机不工作时,驱动转矩的转矩均等分配到左右两侧车轮; (2)在车辆直驶时电机不工作。
1 电动转矩定向差速器的结构及分类
1.1 电动转矩定向差速器的结构
电动转矩定向差速器最简单的构型为二自由度五构件机构,其结构图如图1所示。它主要由以下几部分组成:一个差速机构、两个行星排和一个电机组成。其中差速机构、两个行星排均为二自由度机构。差速器机构是一个内外啮合双星排,它由差速构件I、左侧输出轴L和右侧输出轴R组成。第一个行星排和第二个行星排均为普通排,都是有三个构件组成。
构件I与输入相连,为了使机构能够运转,机构必须为二自由度。因此,需要差速机构的两个构件与两个行星排相连,这样差速器机构的三个构件I、L、R中就有三种连接形式,即IL、IR、LR。同时,为了使得进入普通排的转速与输出转速方向相同,构件C必须为第一个行星排和第二个行星排的同名构件间的连接。因此,构件C的选择有三种,即太阳轮-太阳轮,齿圈-齿圈,行星架-行星架。根据机构的实际布置,与机构相连的其他构件位置就可以确定。
图2为图1机构的速度图表示方法,可以看出差速机构与两个行星排间的各构件的转速关系。根据行星排的特征参数,可以假设点F与点C到点L的横坐标距离分别为1和k1。点M和点C到点R的距离分别为1和k2。其中,k1和k2分别为第一个行星排和第二个行星排的特性参数。
通过采用速度图法,最简单电动转矩定向差速器的所有类型可以被分为9种,如图3所示。
2 电动转矩定向差速器的转速和转矩分析
2.1 电动转矩定向差速器的转速分析
在本文研究中以车辆左转向为例,针对A-OO构型进行研究。
根据差速器各构件转速关系式有:

且有

其中,NI、NL、NR分别表示构件I、L、R转速,ΔN表示构件R和构件L转速差。
求解式 (1)、 (2) 可得到:
在图4(b)中,根据线段比例关系可以得到构件I和构件C转速关系:

得到构件C转速为:

构件C与构件R转速关系为:

电机转速NM可表达为:

由于在电机不工作的时候,即NM=0,差速器左右两侧输出转速相等,即ΔN=0,因此有:

两个行星排特征参数相等,得到:k1=k2。设k=k1=k2,电机转速可表示为:

2.2 电动转矩定向差速器的转矩分析
在转速图中,各构件转矩以各点受力形式表达出来。如图4所示,可以看出电动转矩定向差速器各构件的扭矩关系。其中,TI是输入构件I的转矩,TR是右侧输出轴的转矩,TL是左侧输出轴的转矩。

图4 电动转矩定向差速器转矩分析
为保证机构稳定运转,线段LR上三点I、L、R受力应实现受力平衡,有:

当电机M工作时,各构件间受力关系发生变化,如图4(b)所示第二个行星排受力关系为:

其中,TM为电机M转矩,TCX为杆FC对杆CM的转矩,TRX为杆LR对杆CM的转矩。
当电机M工作时,第一个行星排转矩关系如图4(c)所示,有:

其中,TLX为杆LR对杆FC的转矩。
根据公式 (12) (13) (14) 求得:

由此关系式可以看出,杆LR对杆CM的作用力TRX以及杆LR对杆FC的作用力TIX均是由电机产生的。
如图4(d)所示,当在电机M工作各构件运行稳定时,各构件间转矩关系为:

将公式 (15)代入公式 (17)可以求得:

联立公式 (10)和公式 (18)可以求出左右两端输出转矩表达式:
由上式可以看出,在电机M不工作时,差速器左右两侧输出轴的转矩是相等的,均为输入转矩的一半。在电机M工作时,左侧输出轴转矩减小,右侧输出轴转矩增加,且左侧减小的与右侧增加的相等,车辆实现左转。两侧转矩差为:

3 电动转矩定向差速器特性分析
为了在9种电动转矩定向差速器方案中找出优选方案,转矩放大系数G可表示电机转矩的放大值,G为左右两侧输出轴的转矩差与电机输出转矩之比。

由公式 (21)有,

将公式 (23)代入公式 (21) (22)可以得到电动转矩定向差速器工作时左右两侧输出转矩为:
电机M的转速用G可表示为:

根据公式 (22)可以得到电机M转矩为:

由公式 (24) (25)可求得电机功率为:

因此电机的功率大小只与左右车轮的转矩差、转速差有关,与差速器、行星排连接形式无关。
以此类推,其他构型的特征参数可求得,如表1所示。
根据行星排结构可知行星排特征参数取值范围为:1.5~4,因此每种类型的转矩放大系数G、构件C的转速的取值范围是一定的。在图5中可以看出每种类型转矩放大系数G的变化曲线。
在图5中,只有A-OO构型、A-OI构型、A-IO构型和X-OO构型可以实现转矩放大系数大于1,且在随着行星排特征参数的增加,XOO构型的转矩放大系数都大于X-IO构型、XOI构型、V-OO构型、V-IO构型、V-OI构型。转矩放大系数越大,电动转矩定向差速器工作时所需的电机转矩越小,有利于减小电机的尺寸和质量,减小了车辆的加速阻力。以选取相对较小电机功率的前提下,在图6各构型电机转速与行星排特征参数关系中可以看出,在选取一定的行星排特征参数,A-OO构型、A-OI构型、A-IO构型中电机转速相对于其他构型较高。如果在行星排特征参数相等的条件下,电机转速较高,会使得电机的功率增加进而增加电机成本。而XOO构型,X-IO构型、X-OI构型、V-OO构型、V-IO构型、V-OI构型的电机转速随着行星排特征参数k的变化,对电机转速要求相对较小。
因此,在综合考虑电机转矩放大系数和对电机转速要求下,X-OO构型相对较优,即可实现大的转矩放大系数,又可以降低电机转速的要求。
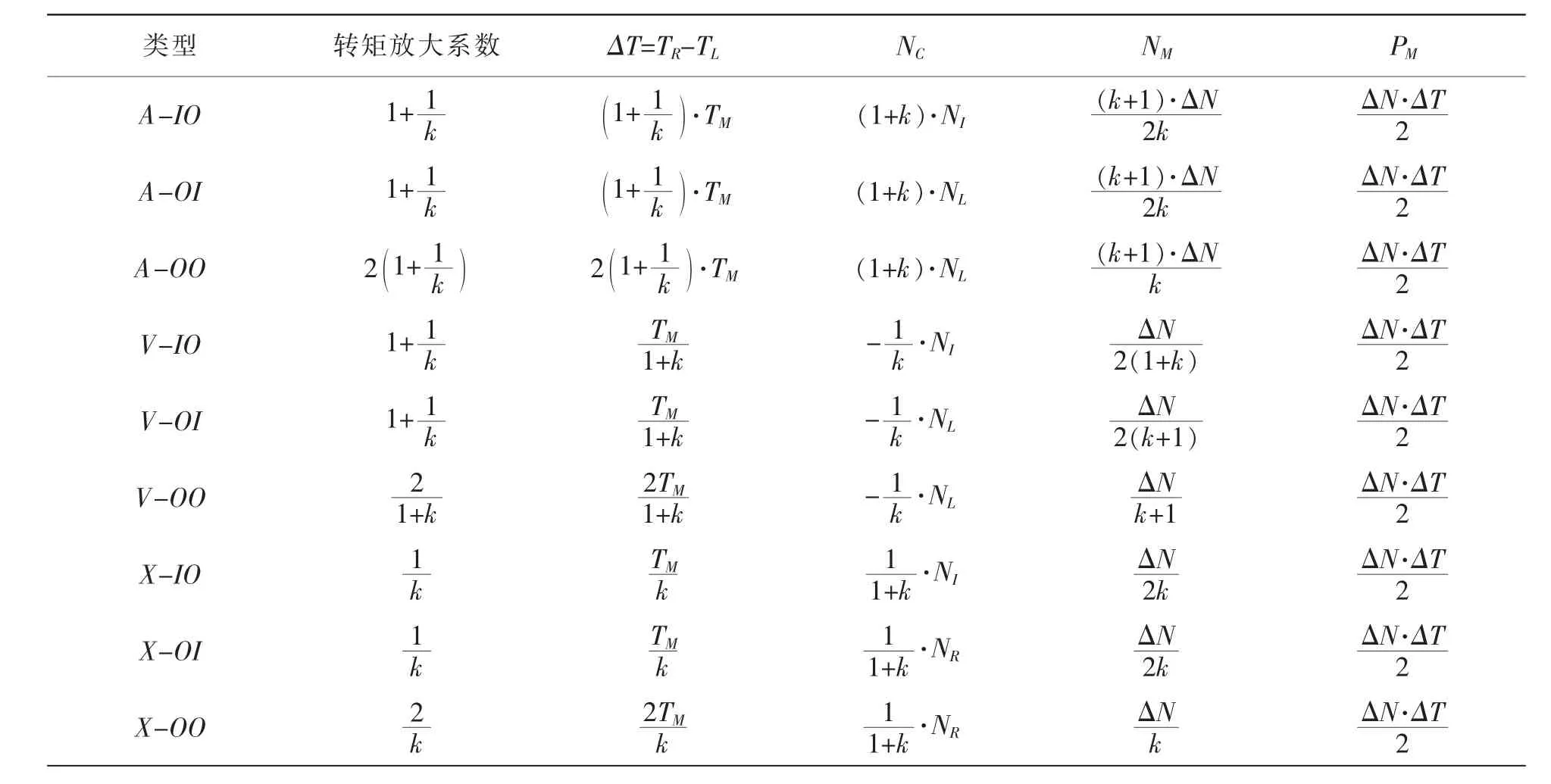
表1 电动转矩定向差速器特性参数

图5 各种构型的转矩放大系数的对比
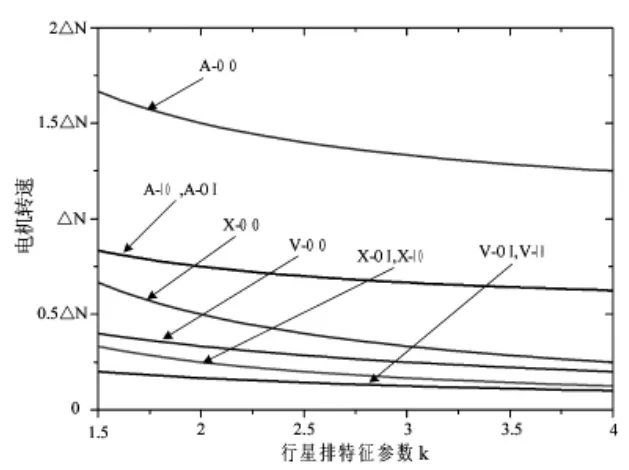
图6 各构型电机转速与行星排特征参数关系
4 结论
最简单的电动转矩定向差速器是一个二自由度五构件机构,包括一个差速机构、一个电机和两个行星排。本文根据各构件运动关系将电动转矩定向差速器分为9种,给出了每种构型的运动简图。并且采用速度图法对各构型进行转速、转矩的分析,得出电机转矩与左右车辆转矩差之间的关系,通过对每种构型的转矩放大系数G、需求的电机转速的对比分析后,发现X-OO构型可以实现转矩放大系数大于1,随着行星排特征参数的变化需求的电机转速相对较小,因此X-OO构型为相对较优构型。
[1] Shibahata Y,Shimada K.,and Tomari T.Improvement of vehicle maneuverability by direct yaw moment control.In Proceedings of the First International Symposium on Advanced vehicle control(AVEC'92) ,Yokohama,Japan,14-18 September 1992,paper 923081:452-457(Society of Automotive Engineers of Japan,Tokyo);Vehicle System Dynamics,1993,22 (5) :465-481.
[2] Motoyama S,Uki H,Isoda K and Yuasa H.Effect of traction force distribution control on vehicle dynamics.In Proceedings of the First International Symposium on Advanced vehicle control(AVEC'92) ,Yokohama,Japan,14-18 September 1992,paper 923080,447-451(Society of Automotive Engineers of Japan,Tokyo);Vehicle System Dynamics,1993,22(5): 455-464.
[3] Sawase K.and Sano Y.Application of active yaw control to vehicle dynamics by utilizing driving/braking force.JSAE Review,20 (1999): 289-295.
[4] Hori Y.Future vehicle driven by electricity and control-research on 4 wheel motored‘UOT March IIc'.IEEE Trans Ind Electron 2004;51 (5): 954-962.
[5] Ch Wirth,M Ernstorfer.Torque Vectoring in electrical drives with coupled planetary gears and complex compound planetary gears.VDI-Berichte,2013,Vol.2187:441-459.
[6] Hoehn B-R,Stahl K,Gwinner,P.Torque-vectoring driveline for electric vehicles.In:FISITA world automotive congress,Lecture Notes in Electrical Engineering,Vol 191,Bejing,People's Republic of China,27-30 November 2012:585-593.
[7] Tomo Kato,Kaoru Sawase.Classification and analysis of electric-powered lateral torque-vectoring differentials.Proc IMechE Part D:J Automobile Engineering,2012,226 (6): 713-724.
[8] Sawase K and Inoue K.Classification and analysis of lateral torque-vectoring differentials using velocity diagrams.Proc IMechE Part D:J Automobile Engineering,2008,222 (9):1527-1541.
Analysis of the Characteristics of the Electric-powered Torque-vectoring Differential
LI Jing WANG Mei
Because of its more and more widely used in recent years,the electric-powered torque-vectoring differential has become the focus of research.However,the design and characteristics analysis of mechanism need a further study.The relationship between the rotational speed and torque of each member is analyzed in this article by the speed diagram method to represent all types of the simplest-powered torquevectoring differential mechanism.And the relationship between the speed and torque of each component in configuration is analyzed.A better configuration is selected by comparing and analyzing the motor speed and torque amplification factor G in each configuration.
torque-vectoring,speed diagram method,planetary gear train
U463.218+.3
A
1008-3812(2017)04-018-05
2017-07-08
李靖 (1966— ),女,辽宁沈阳人,副教授。研究方向:工业自动化。
