汽车后视毫米波雷达安装角标定系统设计研究
2017-10-17朱子甲汪进刘奎王崇阳
朱子甲,汪进,刘奎,王崇阳
(安徽江淮汽车股份有限公司,安徽 合肥 230601)
汽车后视毫米波雷达安装角标定系统设计研究
朱子甲,汪进,刘奎,王崇阳
(安徽江淮汽车股份有限公司,安徽 合肥 230601)
文章论述了基于汽车后视毫米波雷达系统的安装角标定方案。该侧后雷达系统实现了盲区监测,换道辅助等功能。针对上述功能的实现,需要对雷达进行安装角标定,目标角度的测量是对确定目标相对于本车的车道位置、计算纵向车速进而计算碰撞时间等具有决定性的影响因素,对于报警结果产生直接影响,其测量的准确性尤为重要。论文从雷达测角理论分析,到实际现场方案验证,进行了详细的阐述。
毫米波雷达;探测角;标定;角度测量
Abstract:This paper discusses the control logic of the rear flank radar system based on microwave radar. This rear flank radar system has realized the function of the blind spot detection, lane change merge assist, cross traffic alert, rear collision warning and passenger door open warning. For the above function, this paper describes the functional one by one and discusses the control logic design of the system. The content mainly includes open condition, alarm condition, alarm type and functional logic for each function of the system. At last, the paper reviews the progress of the functional alarm logic priority.
Keywords: Microwave radar; Control logic; Functional description; Open condition; Alarm condition
CLC NO.: U462.1 Document Code: A Article ID: 1671-7988 (2017)18-88-04
概述
汽车后视雷达应用微波探测汽车后方目标车辆或障碍物的距离、方位和速度信息,利用这些信息实现后方的主动安全驾驶。其中,目标角度的测量是对确定目标相对于本车的车道位置、计算纵向车速进而计算碰撞时间等具有决定性的影响因素,对于报警结果产生直接影响,其测量的准确性尤为重要。目标角度的测量主要原理是利用目标相对于雷达模块不同接收通道的相位关系来确定的。
在批量生产装车的过程中,存在以下两点问题:首先,批量生产过程中,雷达模块本身存在接收通道相位的差异;其次,批量装车过程中,雷达安装到汽车本身带来的角度测量调制的差异。以上问题都会影响最终的目标角度的准确测量。因此,需要对每一对雷达模块装车的角度进行出厂前的快速校正。
1 毫米波雷达测角理论分析
1.1 雷达测角原理
BSD雷达应用的测角方法是比相测角法。对于装车的雷达模块,真实的安装角度与设计的安装角度以及综合通道相位引起的角度误差有一定的差距。如果不进行角度校正,将会出现一种现象:当目标沿着与车身纵向平行做直线运动时,雷达模块测量得到的目标运动轨迹显示为一条与车身纵向存在一定夹角的直线甚至不规则曲线运动。雷达测角原理可以用下式表示:
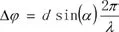
其中,λ表示电磁波的波长,d为接收通道间的间距,Δφ表示方位角为α的目标在两个接收通道之间产生的相位差。对于24GHz频段,现有的天线加工工艺可以确保通道间距与波长的比值对角度测量的影响可以忽略,因而,角度测量仅仅取决于Δφ。
1.2 影响雷达探测精度因素分析
通过以上分析,结合雷达实际的装车状态,影响目标通道间相位差的因素主要包括:雷达模块本身接收通道间的初始相位差;雷达模块外壳的不规则面型对波束的反射和透射的调制相位差;汽车后保险杠的不规则面型对后发波束的相位调制。考虑到应用过程中,最终用于报警算法的目标车辆方位是相对本车的,因而,雷达标定也需要考虑雷达阵面法线与车身纵向轴线的夹角,即雷达的机械安装角。
1.3 实验验证方法
针对雷达接收通道间的相位差异,设计了一组实验。在一个小暗室中放置一个电动转台,一个位置固定的目标模拟器,雷达模块固定在电动转台上,可以通过调整转台的角度来调整目标模拟器相对雷达模块的方位。这样,可以测量雷达模块不同方向的模拟目标与雷达测量的目标方位的对应关系。其典型的测量结果如下所示:
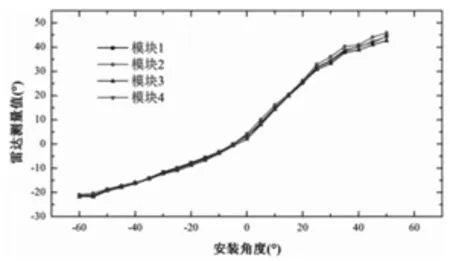
图1
图中显示了同一批次生产的4个雷达模块的测试结果。可以看出,由于雷达两个接收通道的相位差异,雷达测量结果与实际目标的方位存在较大的差异;另外,同一批次生产的雷达在测角性能上差异较小。
利用上述测量的雷达模块角度对应关系对雷达测量的输出角度进行修正,并得到了模块的测量结果,其典型值如下图所示:

图2
图中的两条曲线分别表示雷达输出探测结果与理想结果时真实角度与测量角度的对应关系。可见,经过角度修正后,雷达的角度测量结果与真实方位在误差允许的范围之内保持一致,保证了角度测量的准确性。因而,相位差异引起的角度偏差可以通过以上方法修正来消除。
对于雷达模块的机械安装角度的偏差,由于车辆的钣金支架上雷达安装剖面存在差异,导致不同车辆雷达安装角度与系统设计提出的设计值存在差异,这种差异会导致用于报警算法的目标方位与雷达输出值和安装角度设计值之间存在整体的偏差,结果可以表示为下图:

图3
由上图可知,未经机械安装角度修正,雷达模块输出值与真实值存在固定偏差。要修正这个固定的偏差,理论上只需要对比一个已知方位的目标的雷达探测输出结果和真实方位,即可以消除该固定偏差。
2 标定方案
依据上述影响角度测量的分析,提出后视雷达角度标定的思路如下:
(1)修正对雷达接收通道有相位调制因素而引起的角度测量偏差:
接收通道间相位调制引起的差异包括模块本身的初始相位差以及天线罩和保险杠等因素的调制相位差,这些调制可能是线性或非线性调制。而对于批量生产的雷达模块,模块间的差异较小,表现出的性能上的差异也相对较小,因而,可以通过连续测量不同已知方位的标准目标与雷达测量方位结果的对应关系来修正上述线性或非线性相位调制。该步骤在雷达模块出厂前完成。
(2)修正由于雷达的机械安装角度而引起的角度偏差:
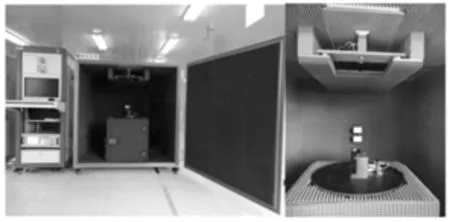
图4
方法1完成的基础上,除去机械安装角度的因素,雷达模块能够较为准确地对目标的角度测量。雷达装车下线时在指定工位上,需要对安装角度进行修正,其方法是在相对车辆的固定位置放置至少一个目标,其相对车辆的方位角是已知的,而目标相对于雷达模块的方位角由雷达的探测结果给出。通过对比雷达输出的测量角度、目标相对车辆的方位角度以及设计的安装角度值,可以得出用于雷达报警的修正角度。该过程在车辆下线后,出厂前完成。
对于步骤 1,雷达模块在供给整车厂前已经对其进行校正。目前生产线测试设备已经具备实施这一角度校正过程的能力。校正设备如图4所示。
对于步骤 2,需要在整车厂完成车辆装配后,对雷达的安装角度进行修正,需要建设固定的工位来实施。综合考虑标定工位的大小、雷达标定的环境等因素,采用固定的点目标的方法对雷达安装角度进行修正,如下图所示:

图5
图中,在汽车左右两侧给放置两个目标,并分开一定的距离,这两个目标的连线与汽车的纵向轴线平行。利用两侧的雷达对各自一侧的两个目标测量的距离、角度输出,可以确定汽车纵向轴线与雷达法线方向的夹角,进而得到雷达的真实安装角。理论上,仅需要一个目标就可以得到该安装角,增加一个目标可以增加标定的准确性。
3 方案验证过程设计
方案验证方法:上述校正方案的步骤1已经得到了验证,因此,这一部分主要是验证步骤 2,修正的效果以雷达应用的效果为判定标准。首先利用已完成安装角修正的雷达(通过运动目标校正的方法,其BSD应用已通过跑车试验验证),读取其安装修正角。其次,按照上述固定目标的方法,计算出此方法得到的安装修正角。最后,对比两者之间的差异,并开展实车路试,验证该修正角下车辆的 BSD功能是否正确,进而验证方案的可行性。
首先,已通过运动目标修正并得到验证的雷达平台,其机械校正角度如下图所示:

图6
上图中,显示的修正角度为-30°。按照标定方案中的视图,实际测试现场如下图所示:
图中,利用了两个角反射器作为标定目标,这两个目标被放置在事先标定好的、与车辆中轴线平行的直线上。另外,为了抑制其他的干扰目标,整个实验被放置在暗示中进行。

图7
将雷达模块通电,在调试界面上读取两个目标角度、距离信息。输出结果如下图所示:

图8
有图可知,两个目标相对于雷达坐标系的角度分别为-33.95°和5.6°。考虑到雷达的距离分辨率,对于两个距离较近的目标,距离测量结果不够准确。对于实际的校正过程,两个目标相对于车辆的位置是固定的,可以直接得到目标相对于雷达的位置。实验过程中,利用激光测距仪测量了目标相对于雷达的距离分别为1.39m和3.167m,如下图所示:
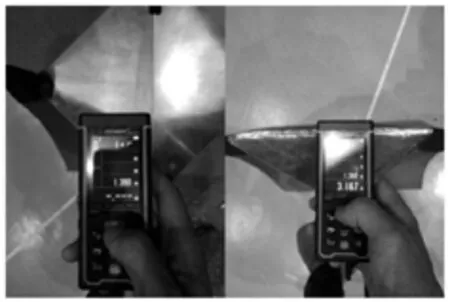
图9
根据上述测量结果,计算得到机械修正角度为:

带入测量结果,得到标定的修正角为-28.5°。
本方案的修正角结果与运动目标校正的结果基本保持一致,相差1.5°,实车跑车试验表明,该机械修正角达到车辆BSD应用的功能要求。可能原因:两个目标的连线与车身纵向中轴线不是严格平行,-30°的修正角也是一个不影响BSD应用的近似值。所以,通过上述对比试验验证,可以得出,该方案是可行的,可以用于车辆下线后对机械安装角的标定。
4 标定工位建设方案及场地要求
按照上述校正方案,考虑到实际下线标定可提供的工位空间,提出了工位中所需设备以及相关设备相对位置的设计、总体分布情况如上图所示。

图10
本方案包含的设备包括小型微波暗室、两个小号的角反射器,两个大号的角反射器以及对应的固定支架。

图11
为了消除雷达多次散射杂波和外界目标的对标定的影响,整个标定过程在暗室中进行。暗室之所以“暗”是因为暗室内壁涂有吸波材料,可以将电磁波吸收来消除杂散波。小型微波暗室的尺寸如图中所示,图中的吸波材料要求覆盖24GHz频段,并且对该波段的入射电磁波的反射小于35dB。(可参考我所微波暗室的吸波材料,型号为 SA-700PI,制造商为大连东信微波吸收材料有限公司)。

图12
校正过程是针对左右两侧雷达,每一侧各需要一大一小角反射器。角反射器的尺寸如图所示,通过支架固定在地面上。支架表面也需要用吸波材料包裹,角反射器在支架上的高度可调且能锁紧,调节范围为0.5m-1m;角反射器在支架上可旋转方位且能锁紧;支架与地面的相对位置纵向可调,调节范围±0.1m。待校正的车辆停入小型暗室后,车辆的纵向中轴线与两个角反射器中心连线的夹角小于0.1°。目标与车辆的相对位置关系参见图中标示。
5 毫米波雷达标定流程设计
车辆从上一个工位转到雷达标定工位,当车辆在指定的位置停下后,就将开始雷达安装角度校正过程。校正流程可以用下图表示:
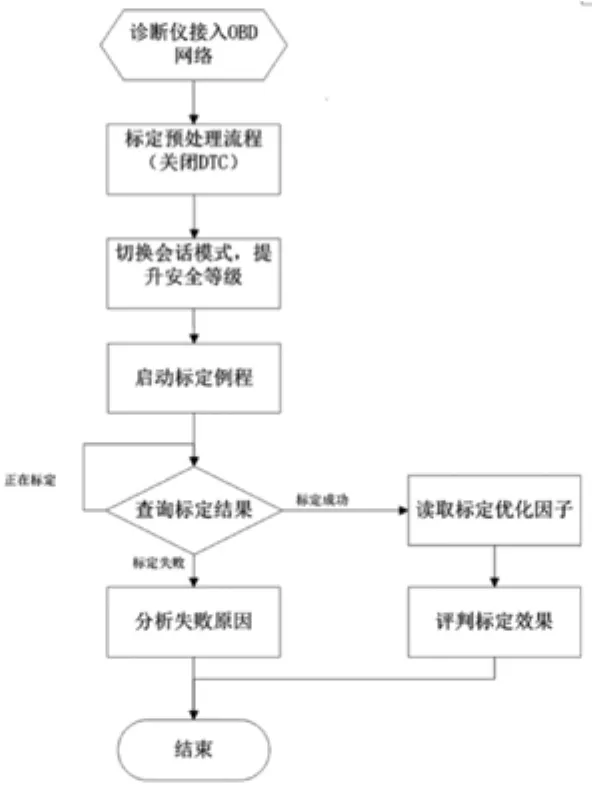
图13
首先,将诊断仪接入车身的 OBD接口上,在诊断仪上设定预先设置的选项,这些选项包括选定预处理流程,切换会话模式,提升安全等级。
然后,启动标定例程,按照预先设置好的标定例程进行标定并不断地查询标定结果,当标定成功后,读取标定优化因子并评判标定的效果;当标定不成功时,将会分析标定失败的原因。整个过程中由模块自动完成,标定结果在诊断以上输出显示。
最后,根据诊断仪上输出的结果确定是否重新标定,结束并完成标定。
6 结论
本文从侧后毫米波雷达系统探测角度原理进行分析,找出影响雷达探测角度精度的因素,并就影响因素,进行理论和实践分析验证,排除次要因素,锁定主要因素,进行详细的分析验证,并结合雷达功能实现及场地施工因素,综合考虑后,得到侧后毫米波雷达安装角标定方案,并进行了实地测试验证,该套方案满足侧后雷达安装角标定要求。
[1] ISO 17387-2008 Intelligent transport systems-Lane change decision aid systems (LCDAS).
[2] 张洪波,刘艳.丰田倒车侧方盲点监测系统发展[J].汽车与配件,2014.36.
[3] 雷达信号处理基础.[美]Mark A.Richards著.邢孟道,王彤,李真芳等译.电子工业出版社 2008.6.
A control logic design research of one rear flank radar system
Zhu Zijia, Wang Jin, Liu Kui, Wang Chongyang
( Anhui Jianghuai Automobile Co., Ltd, Anhui Hefei 230601 )
U462.1 文献标识码:A 文章编号:1671-7988 (2017)18-88-04
10.16638/j.cnki.1671-7988.2017.18.031
朱子甲,就职于安徽江淮汽车股份有限公司。