基于侦察图像信息的目标提取和测量研究
2017-10-16刘军辉关兴来屈金标吴魏屹
刘军辉,关兴来,屈金标,吴魏屹
(1.西安交通大学电子与信息工程学院,西安 710049;2.装甲兵工程学院,北京 100072;3.中国洛阳电子装备试验中心,河南 洛阳 471000;4.军械工程学院,石家庄 050003)
基于侦察图像信息的目标提取和测量研究
刘军辉1,2,关兴来3,屈金标4,吴魏屹4
(1.西安交通大学电子与信息工程学院,西安 710049;2.装甲兵工程学院,北京 100072;3.中国洛阳电子装备试验中心,河南 洛阳 471000;4.军械工程学院,石家庄 050003)
光电侦察在战场侦察中具有非常重要的地位。但我军现有的光电侦察装备,仅仅能够记录侦察获得的图像信息,还不具有自动检测和提取图像中目标的能力,无法满足现代战争条件下战场侦察的需要。针对现有光电侦察的需求,采用改进的均值分割算法提取图像目标,进而采用空间滤波的方法滤除噪声,并利用游程连通性分析和计算形心坐标方法实现目标位置的提取和测量。
运动目标,分割,测量
Abstract:Photoelectric reconnaissance plays a very important role in battlefield reconnaissance.But the current Photoelectric reconnaissance equipment of our army can only record image information gained by equipment,which don’t have the ability to detect and pick up the targets of images automatically,and cannot meet requirements of battlefield reconnaissance of modern war.Aiming at the current requirements of photoelectric reconnaissance,this paper adopts an improved separated mean value algorithm to pick up image targets,spatial filtering method to filter noise,and uses connectivity analysis and centroid coordinate calculating method to fulfill the picking up and measuring of targets’position.
Key words:moving target,picking up,measuring
0 引言
我军装甲侦察车辆[1]现有的侦察手段,主要包括雷达侦察和光电侦察。光电侦察[2]是利用光源在目标和背景上的反射,或目标、背景本身辐射电磁波的差异来探测、识别目标并对目标进行跟踪、测量。其主要优点是成像分辨率高,能提供目标的清晰图像;被动侦察隐蔽性好,不容易被敌方探测;不受电子干扰影响,可以在恶劣的电子环境中工作。
但是目前我军现有的光电侦察设备仅能够记录侦察图像,无法自动提取侦察目标,存在测量精度低、多目标数据处理时效性差等缺点,无法满足现代战争条件下的侦察需要。为提高侦察目标信息的快速处理能力,有必要研究一种图像序列中目标自动提取和测量方法,满足以下需求:
①具备运动复杂背景下的目标提取和测量能力;
②具有自动处理多目标的能力。
基于当前光电侦察需求,本文对运动目标提取和测量进行了研究。
1 运动目标分割
在图像信息处理[3-4]过程中,运动目标提取和测量包括运动目标信息检测、运动目标分割、运动目标标记等,如图1所示。

图1 图像信息处理过程
目标检测[5]主要是利用光流值作为目标检测的特性值,限于篇幅,本文不作介绍。本文主要介绍运动目标分割、运动目标标记和测量。
1.1 光流均值分割算法
目标分割[6]是通过判断每一像素点光流值的绝对值大小来实现。在获取侦察图像后,分别求出每一像素点水平光流u和垂直光流v后,取其水平和垂直光流中较大的一个作为光流值,用m表示,如式(1):

式(1)中,m为各个像素点的光流值,单位为灰度。
由于被侦察目标一般处于距离较远的位置,其在像面上投影面积很小,运动目标在图像投影中像素光流值均值大于背景部分。设运动目标、背景和整幅图像的光流平均值分别为M1、M2、M3,则3个数值之间的关系如式(2)所示:

因此,可以在均值附近选择一个适当的阈值对运动目标的分割。其算法是:先对图像中所有像素的水平和垂直光流值取绝对值,将图像中每一个像素的光流值减去阈值,大于0的为目标,小于等于0的为背景。
设各点的光流值为mxy,x和y分别代表图像中像素点的坐标,将图像中各点光流绝对值减去M,如式(3)所示。

式(3)中,m1xy为减去均值后各像素的光流值。由于噪声等原因,可能出现部分背景像素的光流值明显大于其邻域的像素,为了滤除这些干扰,可以将阈值加上一个修正量:αM,其中α为修正系数。这样式(3)就变成:

α可以通过分布函数计算求得。
1.2 干扰噪声消除
因为噪声原因,按照上述算法求出的目标光流场只是稀疏光流场,并不能准确地反映目标轮廓,无法正确分割目标。只有排除干扰,才能求出目标的稠密光流,进而分割目标。
本文采用均值滤波算法解决这个问题。其原理是,先确定平滑窗口的尺度,然后将图像中的各像素,在其平滑窗口范围内求其及邻域像素的光流平均值作为这个像素的平滑后光流值。公式如下:
式(5)中,x和y分别是当前点的横坐标和纵坐标,m1(x,y)是点(x,y)处的稀疏光流值,m2(x,y)是进行平滑处理后,点(x,y)处的稠密光流值,2n+1是光流窗口的大小。图2为当n=1时以某点光流值为中心的3×3个空间滤波模板。
图2 空间滤波模板
由于图像分割是按照各像素的光流值是否大于0将图像分割为目标和背景,因此,在各像素光流值相对比例和符号不变情况下,具体数值的大小并不重要,为了简化运算,式(5)中的分母(2n+1)2可以省略,如式(6):

1.3 目标区域获取
为了清晰突出目标,需要将已经分割出目标区域的光流场作二值化处理,即设定一个阈值δ,然后将光流场中光流值大于阈值δ的像素光流为1,小于或等于阈值δ的像素光流值为0。如式(7)所示:
此时,光流场就是稠密的二值图,已经不存在背景信号,但由于受干扰和误差等因素影响,在目标区域轮廓中还会存在各种裂痕或孔洞,且边界也不够平滑。为此,本文采用闭运算,即先膨胀后腐蚀来解决这个问题。
将光流场和原图进行与运算,可获取图像目标。但由于求光流是采用两帧图像差分的方法,光流场所包含的像素范围是两帧图像中目标所包含像素范围的并集,因此,提取目标时,另一帧图像中目标覆盖的背景也被提取出来。当目标运动速度较慢时,其误差可以忽略不计,但对于高速目标会出现明显的错误。为解决这个问题,本文将本次求出的光流场和上一次所求光流场进行与运算,然后再将结果和本次所用的第一帧图像进行与运算,消除目标周围背景。
2 目标标记与测量
在完成目标分割后,需要对图像目标进行连通性分析,进而标记图像目标范围,完成目标位置的测量。
2.1 游程连通性分析
游程[7]是连续扫描线在一个连续图像区域内形成的线段,使用游程算法比逐像素判断要简单。本文首先对单个游程进行标记,使用连续扫描线对图像进行扫描,并将扫描得到的游程标记出来;其次对游程进行汇总处理,判定各游程之间的关系,将属于同一目标的游程数据汇总,标记出目标所包含的所有像素的信息。根据标记出的目标像素信息,可以计算目标的位置。本文采用形心法计算目标图像位置。
形心法是指取出一个目标中像素的最大列坐标和最小列坐标,算出其中间值,为目标的列坐标;取出这个目标中像素的最大行坐标和最小行坐标,算出其中间值,为目标的行坐标,如式(8)。
式中,(ox,oy)表示目标的横坐标和纵坐标。oxmax,oxmin,oymax,oymin分别表示目标右边界坐标、目标左边界坐标、目标上边界坐标和目标下边界坐标。
2.2 游程数据结构设计
根据记录数据的需要,采用两个二维数组结构分别表示游程和目标数据。
目标数组用来记录目标信息,每行表示一个目标的信息。数组有8列,每列分别表示目标编号、目标批号、目标横坐标、目标纵坐标、目标上边界坐标、目标下边界坐标、目标左边界坐标和目标右边界坐标。其中目标的横坐标和列坐标需要在对每帧光流场处理完成,各流程汇总完毕后再计算,数据格式如表1所示:

表1 目标数组每行格式
因为可能出现目标合并的现象,因此,在目标合并后,将该目标编号统一为数值最小的编号,并将与编号相同的行作为记录目标数据的默认行,而后面其他的数据行不再更新使用。然后每帧数据处理完成后,将目标编号和行号不同的目标数据剔除,并对所有目标重新编号。
游程数组用于记录各游程数据,每行记录一条游程的信息。数组有5列,每列表示数据分别是:行号、编号、游程开始列坐标、游程结束列坐标、游程所属目标,如表2所示。

表2 游程数组每行格式
由于每个目标所包含的游程数不同,且游程行号编号也可能不连续,因此,在目标数组中没有记录每个目标所属的游程编号。游程和目标的隶属关系信息记录在游程数组中的最后一列,当需要对目标所包含的游程进行查询时,对游程数组进行搜索即可。
在完成目标的提取和测量后,游程数组中的数据不再保留,而目标数组中的数据则需要保存并输出,供进一步处理。
3 实验验证
下面通过实验验证本文提出的算法可行性。实验分别选取静止背景的视频1和运动背景的视频2为例,在求出其光流场的基础上采用本文提出的分割滤波和游程连通性分析等算法,将目标从背景中提取出来,并计算目标在图像中的坐标位置。
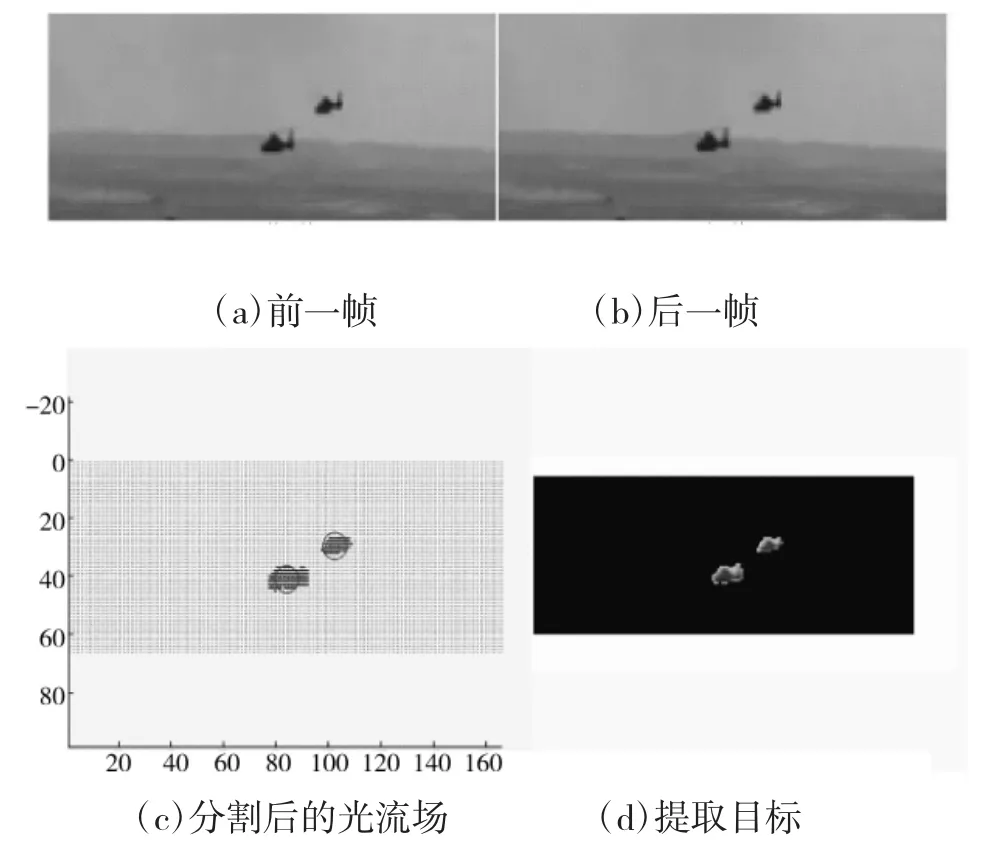
图3 视频1实现目标提取检测
图3是静止背景状态下录制的视频1的一组图像,图3(c)表示对光流场按照本文的算法进行运算后,完全过滤各种干扰信号,提取出目标光流场,并标记出其位置。图3(d)是将光流场和原图像前一帧叠加后,将目标分割出来的情况。
表3是对目标位置的测量值,按照游程连通性分析,将目标的最左、最右、最上、最下4个坐标求出后,计算其形心坐标。从表中可以看出,由于游程连通性分析是从上向下,从左向右逐行扫描的,因此,将图像中靠上的目标标记为目标1,将下方的目标标记为目标2,表中列出两组图像处理后的数据。
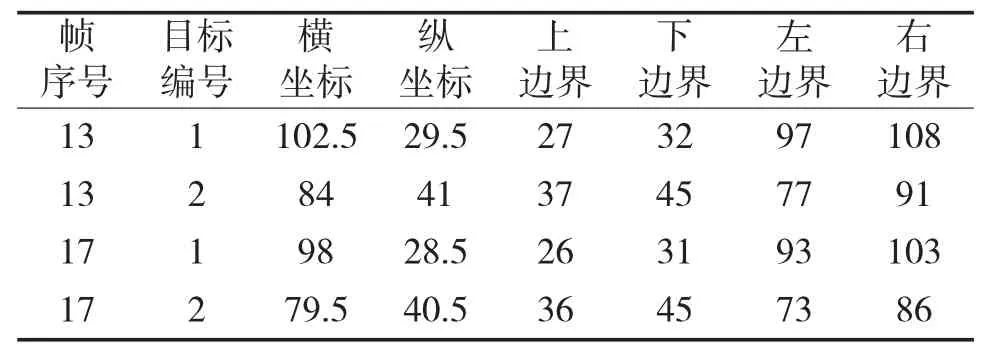
表3 视频1测量目标数据
图4是运动背景状态下录制的视频2的一组图像,通过基于光流的图像移位算法对背景光流进行抑制后,采用本文算法进行分割滤波,并对目标进行提取。图4(c)表示对本次光流场按照本章的算法进行运算后,完全过滤各种干扰信号,提取出目标光流场,并标记出其位置。
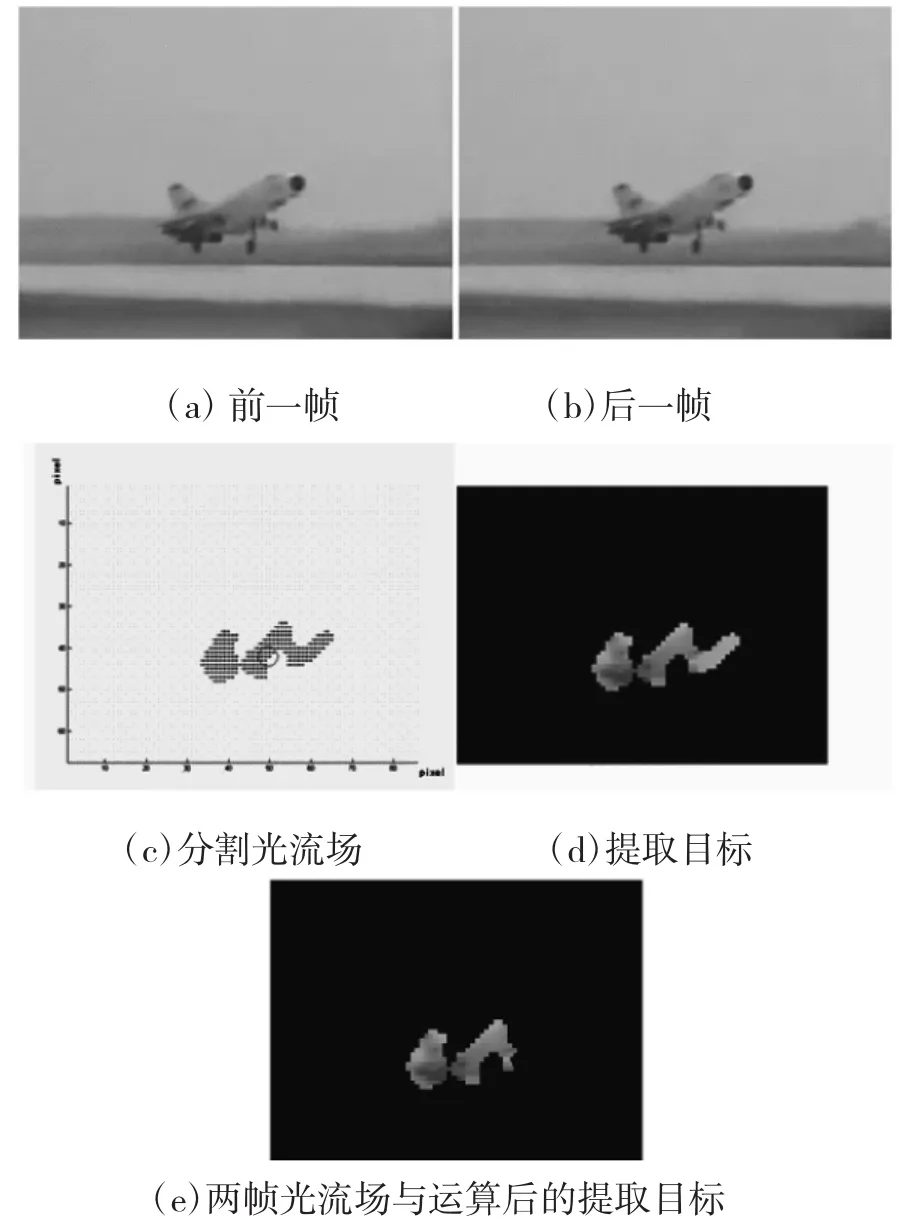
图4 视频2实现目标提取和检测
图4(d)和图4(e)是高速运动状态下两种目标提取算法的对比。图4(d)表示下右图是将光流场和原图像前一帧叠加后,将目标分割出来的情况。可以看出,在目标前方有一块空白区域,这是由于视频1中的目标飞机是高速运动物体,由于光流场所包含的像素范围是两帧图像中目标所包含像素范围的并集,超出了单帧图像中目标的范围,因此,提取目标时,将部分背景提取出來。按照1.3节的方法进行处理后,结果如图4(e)所示。
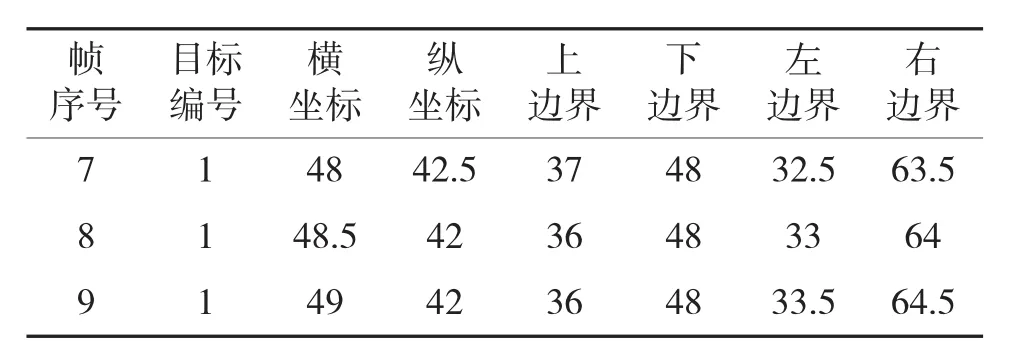
表4 视频2测量目标数据
表4是计算目标的形心坐标表中列出两组图像处理后的数据。从图像处理和位置数据测试的结果看,视频2体现了典型的快速运动背景下目标跟踪测量的特点。从图像分析可以看出,由于目标和设备均相对背景作快速运动,前后两帧图像中目标的位移接近8个像素,但在图像中的位置变化却只有约1~2个像素。
4 结论
针对光电侦察设备仅能够记录侦察图像,无法自动提取侦察目标,测量精度低、实时性差等问题,提出了一种完善的复杂运动背景条件下目标提取和测量算法,采用了光流均值分割方法和闭运算实现运动目标分割,设计了一种游程数据结构标记和测量目标。另外,通过具体实验证明了该方法能够实现运动目标的提取与测量,证明了该方法具备运动复杂背景下的目标提取和测量能力,能自动处理多目标。
[1]成志铎.地面装甲车辆的目标特性建模研究[J].热能工程,2012,17(7):35-47.
[2]牛照东.光电目标检测与跟踪系统算法实现技术研究[D].长沙:国防科学技术大学,2014.
[3]胡觉辉,李一民,潘晓露.改进的光流法用于车辆识别与跟踪[J].科学技术与工程,2010,10(8):5814-5817.
[4]李宏,杨廷梧,任朴舟,等.基于光流场技术的复杂背景下运动目标跟踪[J].光电工程,2006,33(10):14-17.
[5]徐杨.面向视频监控的动态目标检测、跟踪与识别关键技术研究[J].模式识别与智能系统,2015,27(7):34-46.
[6]王席.基于视频光照和纹理信息的动态目标分割与提取[J].计算机科学与技术,2015,30(6):58-67.
[7]李渊.基于游程编码的测试向量压缩方法研究[J].软件工程,2013,29(6):116-121.
Research on Picking up and Measuring of Targets Based on Information of Reconnaissance Image
LIU Jun-hui1,2,GUAN Xing-lai3,QU Jin-biao4,WU Wei-yi4
(1.School of Electronic and Information Engineering Xi’an Jiaotong University,Xi’an 710049,China;2.Academy of Armored Force Engineering,Beijing 100072,China;3.Luoyang Electronic Equipment Test Center,Luoyang 471000,China;4.Ordnance Engineering College,Shijiazhuang 050003,China)
TN919.71;TJ81
A
10.3969/j.issn.1002-0640.2017.09.028
1002-0640(2017)09-0129-04
2016-08-08
2016-09-07
刘军辉(1971- ),湖南湘乡人,副教授。研究方向:数字图像处理与多源信息融合。