远程弹道式飞行器机动制导方法
2017-10-16张洪波汤国建
王 涛,张洪波,王 征,汤国建
(1.国防科学技术大学 航天科学与工程学院,湖南 长沙 410073;2.中国运载火箭技术研究院 研发中心,北京 100076)
远程弹道式飞行器机动制导方法
王 涛1,张洪波1,王 征2,汤国建1
(1.国防科学技术大学 航天科学与工程学院,湖南 长沙 410073;2.中国运载火箭技术研究院 研发中心,北京 100076)
以一种远程弹道式飞行器为研究对象,研究了弹道落点可以覆盖大面积区域的机动弹道设计及制导方法。采用兰伯特定理设计机动弹道,并采用迭代的方法对地球非球形摄动进行补偿。在考虑发动机性能的基础上,采用速度增益制导算法对飞行器进行关机制导。为了保证再入点的高精度要求,提出了一种弹道修正制导算法,制导过程分为横向制导和纵向制导,横向制导采取相平面法,纵向制导采用一种解析的闭路制导算法。仿真结果表明,该文方法能够使飞行器较好地实现远程机动飞行,具有较好的鲁棒性。
弹道设计;机动;制导;增益速度
Abstract:Taking large-range ballistic vehicle as research object,the maneuver scheme and guidance law making the fall-points of the vehicle cover a large area were studied.Lambert theory was used to design the maneuver trajectories,and the non-spherical perturbation of the earth on trajectories was compensated by iterative method.Considering the performance of engine performance,the velocity-gain guidance method was designed to determine the shut-off time of the engine.To improve the terminal precision,a correction guidance method was proposed,and the guidance process was divided into horizontal guidance and vertical guidance.The horizontal guidance is based on the phase plane while the vertical guidance is based on an analytical closed-loop guidance-law.The simulation results indicate that the proposed guidance law is effective and robust.
Keywords:trajectory design;maneuver;guidance;gain-velocity
弹道式飞行器在国防领域中发挥着不可替代的作用。为了提高飞行器的生存能力,飞行器机动发射技术与多头分导、机动再入末制导技术的结合使用是未来发展的必然趋势。
弹道式飞行器的制导方法主要分为摄动制导和显式制导两大类[1]。从V-2导弹发展至今日的洲际导弹,导弹的制导精度提高了2个数量级。显式制导逐渐取代了摄动制导,使制导精度能够达到百米左右[2]。文献[3]提出了预测闭路制导方法,采用数值方法预测目标点偏差,并对目标点进行修正,根据修正后的目标点设计需要速度。文献[4]基于兰伯特定理设计闭路制导方法,为了提高制导精度,根据地球非球形摄动构造了虚拟目标点。文献[5]为了消除闭路制导算法在关机点附近的不稳定影响,给出了一种以目标瞬时方位角为基准的闭路制导方法。文献[6]研究了一种具有机动性能的弹道导弹,设计了满足再入点约束条件的机动弹道,并研究了相应的关机制导方法。文献[7]在对状态量缩减的基础上,利用伪谱法实现了弹道的快速重构,并将重构结果实时反馈更新制导指令,提高了弹道的鲁棒性。文献[8]针对没有末端修正装置的导弹,设计了一种基于弹道倾角的制导方法,采用兰伯特定理实时生成满足弹道倾角约束的弹道,并调整制导指令进行跟踪。文献[9]和文献[10]将神经网络应用到弹道机动飞行器的初制导和中制导中,改善了制导律的性能,然而需要大量的离线工作对神经网络进行训练。
本文针对一种弹道式飞行器开展研究,飞行器的制导过程分为4个阶段。从飞行器发射到飞出大气层之前,进行主动段制导控制。飞行器飞出大气层后,对弹头进行机动制导,使其能够覆盖一定的范围。为了消除发动机后效误差、摄动因素的影响,需要进行中段弹道修正制导,保证高精度的再入条件。飞行器再入大气层后进入末制导段。本文针对弹头机动制导和中段弹道修正制导进行研究,给出了一种基于兰伯特定理的机动弹道设计方法、基于增益速度的关机制导方法以及一种满足再入点高精度约束的弹道修正制导方法,为弹道式飞行器提供一种可靠的制导方案。
1 机动弹道设计
本部分为离线工作。弹道设计问题可以描述为已知当前状态和目标状态的边值问题,如图1所示。在边值问题中,已知两点P1和P2的位置及两点之间的飞行时间,确定飞行轨道的问题称为兰伯特问题。已知兰伯特问题的描述如图1所示,图中,O为中心天体地球,r1,r2为P1,P2两点处的地心距,c为弦长,Δf为r1与r2的夹角。
兰伯特定理指出,圆锥曲线通过空间两定点的飞行时间Δt仅与曲线的半长轴a、两点与引力中心的距离和r1+r2及弦长c有关,即

(1)
式中:μ为地球引力常数;t1,t2分别为飞行器飞行至P1,P2处的时间,Δt=t2-t1。为了求解以上问题,作出以下变换,令
s=(r1+r2+c)/2,

式中:tm为对应最小能量椭圆的飞行时间,0<β<α≤π,-π<η<π,可以求得:

(2)
通过变换,飞行时间可以表示为

(3)
式中:Δf可表示为P1和P2的近地点角度之差。


(4)
由于L(η)是η的单调函数,方程L(η)=0存在唯一解。转移轨道的半长轴a、半通径p与η的关系如下:
(5)
(6)
求出轨道半长轴和半通径后,可以进一步求出偏心率e和初始点的近地点角f1。需要速度v1,R的径向分量v1,Rr和周向分量v1,Rf分别为
(7)
已知飞行器的初始点速度为v1,由式(7)可以得到第1次机动速度:
Δv1=v1,R-v1
(8)
然而,在实际过程中,由于地球非球形引力项的影响,采用上述方法求解变轨冲量往往会带来很大的偏差。偏差修正的基本思想是:首先利用兰伯特定理确定一条从起始点到目标点的弹道,预报出弹道的终点,并计算终点偏差。然后把偏差补偿到飞行终端,再由补偿后的飞行终端反推出所需要的调整速度。如图2所示,图中,D为当前时刻的位置,v0为当前时刻速度,B为目标点位置。
①根据当前位置点D、目标点B及飞行时间Δt,在二体运动的假设下,由兰伯特定理设计弹道L0,并求出L0在D点的需要速度v1,R;
②考虑摄动因素的影响,进行弹道预报,预报方法可以采用数值积分方法(用于离线弹道设计),也可以采用解析的平均根数方法(用于在线制导算法),求出摄动弹道Ls及终点Bs;
③摄动弹道的终点Bs与目标点B的偏差为BsB,将此偏差补偿到目标点,得到修正的目标点Bf,BfB=-BsB;

对于再入点,假设只对速度倾角进行约束,对速度大小不做限制,因此第2次机动速度Δv2主要用来满足速度倾角的要求,可以在速度的垂直方向施加:

(9)
式中:θ2为终端速度倾角,θR为需要的速度倾角。θ2的表达式为
(10)
式中:f2为目标点的近地点角。
轨道转移时间Δts可以通过优化方法确定,保证能量最省:
J=|Δv1|+|Δv2|
(11)
优化算法采用遗传算法,保证全局最优性。由于只有一个优化变量,很快就能找到最优解Δtopt。
如果飞行时间Δts取得合适,仅在Δv1的作用下就能使目标点满足速度倾角的要求,此时,Δv2=0。对于这种情况,存在以下方程组:
(12)
求解上述方程组可以得到:

(13)
求解方程(13),可以得到目标点的近地点角f2,进一步确定转移弹道:
(14)
最后由方程(7)求出需要机动冲量。
2 关机制导方法
本部分为在线工作。考虑到发动机不能提供瞬时的机动冲量,需要设计制导律确定发动机推力加速度aT和开、关机时间。关机制导采用速度增益制导方法。速度增益制导是一种基于需要速度的显式制导方法,需要速度通过第1节的方法求解,从当前位置飞行到目标点的时间为
Δt=Δt0,opt-t
(15)
式中:Δt0,opt为初始时刻的最优轨道转移时间,是一个常数,通过第1节离线优化求出;t为飞行器已飞行的时间。为了提高计算速度,弹道预报采用平均根数法。定义增益速度:
vg=vR-v
(16)
式中:vR,v分别表示飞行器的需要速度与当前实际飞行速度,制导的目的就是使vg逐步达到0。
为获得发动机的最佳推力方向,对式(16)求导:

(17)
式中:g为重力加速度。定义b=dvR/dt-g,代入式(17)可得:
(18)
确定aT的原则是要求dvg/dt能有效地消除vg,这样aT应满足如下必要条件:
(19)
将式(18)代入式(19),则有
aT·eg>b·eg
(20)
式中:eg为vg的单位矢量。引入参数γ,aT应满足:
(γb-aT)×eg=0
(21)
由式(21)表示的几何关系,可以得到aT的表达式:
aT=γb-{γ(b·eg)-[|aT|2+
γ2(b·eg)2-γ2|b|2]0.5}eg
(22)
式中:γ为一可调系数,其取值范围为
(23)
式中:|aT|为常数。γ的取值决定了aT的方向,当γ=0时,推力方向与增益速度方向一致;当γ=1时,推力方向使dvg/dt与vg方向相反。γ的选取原则是使燃料消耗最小,即
①对于大推力发动机,一般有|aT|≫|b|,最佳的γ取值应该在1附近,γ可取为1;
②对于小推力发动机,aT与b相差不大,最佳的γ取值应该在0附近,γ可取为0;
③当发动机推力介于上述两者之间时,γ的最佳取值应该在区间[0,1]中。
3 再入点高精度制导方法
为了保证再入点的精度,在自由段末尾处对弹道进行修正制导。制导方法采用一种闭路制导方法,但该方法难以保证航向约束,所以同时采用相平面方法对横向运动进行控制。如果时间充足,可采取分段制导策略。先修正横向误差,当横向误差达到一定精度时,切换到纵向制导阶段。考虑到非球形引力和大气等摄动因素对弹道面的影响比较小,且剩余飞行时间较短,终端的横向误差很小。如图3所示,弧段①代表横向制导部分,主要消除横向摄动偏差;弧段②代表纵向制导部分,主要用来消除纵向偏差并满足终端速度倾角要求。
1)相平面制导方案。
相平面控制是常用的一种控制模式。当前发动机大多是开关型的,控制量|aT|近似于常值,相平面控制方法是实现这种系统的一种最优方式。
图4包含4条开、关机曲线,将相平面划分为4个区域,其中区域①为发动机正开区域,区域③为发动机负开区域,区域②和区域④是发动机关机区域。
发动机的开关曲线方程如下。
式中:aT为推力加速度,一个周期内可认为是常数。K为控制参数,通过调节K使控制效果达到满意。
2)闭路制导关机方案。
根据二体轨道边值理论,给定平面轨道内的任意4个独立的约束,可以唯一地确定出一条轨道。已知终端点处的再入速度倾角θ2、地心距r2和当前点的地心距r1,在这3个已知变量的基础上,设置Δf,设计闭路制导方案。
如图5所示,在任一时刻,由于当前地心距r1和目标点地心距r2已知,要求再入点处的速度倾角为θ2及再入段的航程角为Δf。
首先推导始末点速度倾角的关系。将两端点处的速度矢量沿径向与周向分解,由方程(7)可知,两端的径向速度vr1,vr2之和为

(24)
式中:L为轨道面的动量矩。将方程(7)的周向速度表达式代入方程(24),得:

(25)
可知vr1+vr2与vf1-vf2成比例。L=r1vf1,而对径向速度有:

(26)
故

(27)
根据方程(25)及动量矩的计算公式,有:
(28)
将方程(27)代入方程(28)即可得θ1与θ2的关系式:
(29)
根据式(29),可以由r1,r2,θ2和Δf确定出当前时刻期望的速度倾角θ1。
根据θ2,可以确定需要轨道的半通径pR:

(30)
式中:pm为最小能量椭圆对应的半通径,即


(32)
由此即可得到当前时刻的增益速度:
vg=vR-v
(33)令发动机的推力方向与vg的方向一致,直到|vg|→0时,发动机关机,末端制导段结束。
4 机动策略及制导实现仿真分析
对本文的制导算法进行仿真验证,地球引力模型采用EGM08模型,引力位考虑到第8阶。飞行器的质量为500 kg,主发动机推力为2 000 N,比冲为2 800 s。飞行器的初始状态在J2000坐标系给出,如表1所示;终端约束条件如表2所示。主发动机推力较大,增益速度制导参数γ取1。为了展示飞行器的机动性能,分别使目标点横向偏移±400 km,纵向偏移±3 500 km。为了验证方法的鲁棒性,进行200次打靶仿真。每次仿真的初始状态误差和导航误差从正态分布模型中抽样,正态分布的3倍均方差(3σ)如表3所示。发动机推力误差和初始质量误差也服从正态分布,对应的3σ分别占标称值的5%和3%。

表1 飞行器的初始状态

表2 终端约束
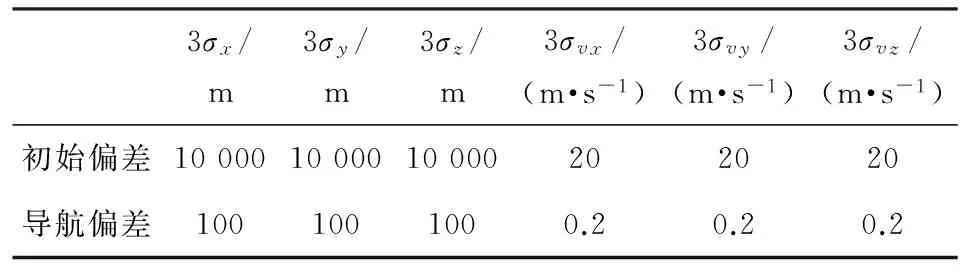
表3 打靶仿真误差
图6给出了J2000坐标系中的5条仿真弹道。从图中可以看出,在制导的作用下,5条弹道都能精确地飞向目标点,落点可纵向覆盖±3 500 km,横向覆盖±400 km。
对目标点横向偏移+400 km的弹道进行打靶仿真。图7给出了200条弹道的地面轨迹,其中,图7(a)为全程弹道的经纬度,图7(b)为飞行器接近终点的经纬度局部放大图;图中,λ,φ分别表示经度和纬度。由于弹道射程较长,弹道跨越180°经度线。在接近终点时,200条地面轨迹逐渐收敛。
图8中,图8(a)为全程弹道的航向角ψ的曲线,图8(b)为末端航向角的局部放大图。弹道的航向角发生了2次跳变,第1次跳变在初始时刻,此时飞行器通过机动改变飞行器航向角,使其瞄准横向移动+400 km的目标;第2次跳变在飞行末端,在相平面方法的控制下,航向角误差校正过度,然后逐渐缩小,最终消除了飞行过程中误差项对航向的影响。
图9中,图9(a)为全程弹道的速度倾角θ的曲线,图9(b)为末端速度倾角的局部放大图。速度倾角逐渐减小到-21°,在接近终端时,纵向制导发挥作用,速度倾角误差逐渐缩小。
图10给出了飞行器的终端位置误差。仿真中,动力学积分以高度为截止条件,所以位置误差只体现在经纬度上,落点半径小于600 m。落点分布与制导方法的判断条件有关,通过改变判断条件可略微提高精度,但燃料消耗会增加。
图11和图12给出了200次打靶仿真末端速度倾角误差Δθf和末端速度vf的统计图。纵坐标n为仿真次数,终端速度和速度倾角速度分布比较集中,倾角存在微小的常值偏差,速度散布半径为25 m。
5 结论
本文针对远航程弹道式飞行器开展研究,设计了弹道机动方案及制导方法,为远程战略导弹、高空大范围机动飞行器等提供一种可靠的飞行方案,为新一类对地打击武器的研究提供参考。主要结论如下:
①利用兰伯特定理设计的机动弹道能够满足终端约束,并具有一定的优化空间。进一步,采用地球非球形摄动力补偿措施对标准弹道进行修正。
②基于速度增益制导原理设计了发动机的关机制导方案。采用解析的平均根数法预报落点,不仅能够考虑非球形的影响,而且具备在线制导的快速性。
③将中段弹道修正问题分为纵向修正和横向修正。纵向修正采用一种解析的闭路制导算法,计算量较小,能够保证终端速度倾角的要求。横向修正采用相平面法,有效地消除了横向位置和速度偏差。
[1] 陈克俊,刘鲁华,孟云鹤.远程火箭飞行动力学与制导[M].北京:国防工业出版社,2014. CHEN Ke-jun,LIU Lu-hua,MENG Yun-he.Launch vehicle flight dynamics and guidance[M].Beijing:National Defense Industry Press,2014.(in Chinese)
[2] 陈磊,王海丽,周伯昭.弹道导弹显式制导的分析与研究[J].宇
航学报,2001,22(5):44-49. CHEN Lei,WANG Hai-li,ZHOU Bo-zhao.The analysis and research of ballistic missile explicit guidance[J].Journal of Astronautics,2001,22(5):44-49.(in Chinese)
[3] 于桂杰,罗俊,赵世范.基于龙格库塔法的预测闭路制导方法研究[J].航天控制,2008,26(5):41-49. YU Gui-jie,LUO Jun,ZHAO Shi-fan.The prediction closed loop guidance based on the Runge-Kutta equation[J].Aerospace Control,2008,26(5):41-49.(in Chinese)
[4] WHITE E J.Guidance and targeting for the strategic target system[J].Journal of Guidance,Control,and Dynamics,1992,15(6):1 313-1 319.
[5] 王继平,王明海,杨建明.一种新的闭路制导导引方法[J].航天控制,2007,25(5):27-61. WANG Ji-pin,WANG Ming-hai,YANG Jian-ming.A new guided method of close-loop guidance[J].Aerospace Control,2007,25(5):27-61.(in Chinese)
[6] 王小虎,陈翰馥,刘锋.机动再入飞行器主动段再入点约束闭路制导研究[J].宇航学报,2002,23(4):37-41. WANG Xiao-hu,CHEN Han-fu,LIU Feng.Study of the closed-loop guidance law for boost phase with reentry constraints of maneuvering reentry vehicles[J].Journal of Astronautics,2002,23(4):37-41.(in Chinese)
[7] 闫循良,廖守亿,何泰,等.基于改进伪谱反馈控制的远程变轨闭环制导[J].宇航学报,2015,37(1):84-92. YAN Xun-liang,LIAO Shou-yi,HE Tai,et al.Modified pseudospectral feedback control based closed-loop guidance for long-range orbit maneuver[J].Journal of Astronautics,2015,37(1):84-92.(in Chinese)
[8] KIM J S,UM Y T.Flight-path angle control for cutoff insensitive guidance[J].Journal of Guidance,Control,and Dynamics,2015,38(4):706-710.
[9] 乔洋,陈刚,徐敏,等.机动再入飞行器神经网络闭路初制导研究[J].弹道学报,2007,19(2):1-4. QIAO Yang,CHEN Gang,XU Min,et al.Initial guidance law of closed-form neural network for maneuverable reentry vehicle[J].Journal of Ballistics,2007,19(2):1-4.(in Chinese)
[10] 张强,雷虎民.一种基于神经网络的最优中制导律[J].弹道学报,2004,16(2):86-91. ZHANG Qiang,LEI Hu-min.An optimal midcourse guidance law using neural network[J].Journal of Ballistics,2004,16(2):86-91.(in Chinese)
ManeuverStrategyandGuidanceLawofLarge-rangeBallisticVehicle
WANG Tao1,ZHANG Hong-bo1,WANG Zheng2,TANG Guo-jian1
(1.College of Aerospace Science and Engineering,National University of Defense Technology,Changsha 410073,China; 2.Research & Development Center,China Academy of Launch Vehicle Technology,Beijing 100076,China)
2017-02-11
王涛(1989- ),男,博士研究生,研究方向为飞行动力学与控制。E-mail:wangtao_smile@126.com。
V448.2
A
1004-499X(2017)03-0007-07
