恒流推进控制系统主回路过流故障分析
2017-10-14吴祖桥
杨 明, 吴祖桥
恒流推进控制系统主回路过流故障分析
杨 明1, 吴祖桥2
(1. 海军驻大连地区军事代表室,辽宁大连 116021;2.舟山万达船舶设计有限公司,浙江舟山 316101)
分析了恒流推进控制系统主回路电流和转速的控制原理,从控制系统的角度分析主回路过电流的发生机理,并提出了减少或避免此类故障发生应采取的措施。
恒流 控制系统 过流故障
0 引言
由铁磁材料构成的舰艇船体,置于自然或人为的外磁场环境中,经历一定时间后,就会导致铁磁材料中磁偶极子排列有序化,从而产生磁化效应[1]。舰船消磁则是用强制的方法产生规律的强磁冲击,迫使磁偶极子重新无序化的过程,它不仅是反磁性水雷的重要措施,也是反磁性探测的重要手段。某船可为舰船提供消磁,该船配备有恒流推进控制系统,其能够对该船设备提供自动化的管理、控制、监视和保护。
恒流推进控制系统是舰船的重要组成部分,在该船系泊、航行试验过程中,恒流推进控制系统在航行状态下数次发生主回路过流故障,进而导致发电机自动开关保护性分闸,主回路解列,进而失去动力,对舰船的运行安全产生较大影响。本文即从控制原理的角度分析主回路过流故障的产生机理,以便在后续船恒流推进控制系统的设计、建造中采取相应措施,避免或减少此类故障的重复发生。
1 恒流推进控制系统
推进控制系统按照控制功能的侧重点不同主要划分为四部分:电源、主回路系统、励磁控制系统和计算机监控系统,系统组成结构如图1所示。

为保证舰船的消磁和推进共用一套系统,恒流推进控制系统的主回路系统设计为直流的恒流制系统,配备四台柴油直流发电机组、两套直流推进电机。在消磁作业时,四台机组独立工作;在推进作业时,由机组为电动机供电,电动机带螺旋桨推进。主回路系统的基本结构如图2所示,可根据推进工况,进行开关的选择,进而选择主回路为单机组-双电动机、单机组-单电动机和双机组-双电动机等模式。
2 主回路系统的控制原理
2.1 主回路电流控制原理
主回路电流控制的基本原理是柴油机保持在额定转速,在此条件下,调节直流发电机的励磁电流而使其电枢电流保持恒定。控制系统原理图如下[2]。

图中,()——电枢电流设定值,()—电枢电流实际值,()—外环控制器,()—发电机在额定转速状态下电枢电流到励磁电流的传递函数,()—内环控制器,()—整流装置输出电流到触发角的传递函数,()—整流装置,()—发电机,()—电枢电流反馈通道传递函数,()—负载扰动,()—负载扰动对发电机励磁电流影响的传递函数。
由控制系统方框图可见,主回路电流控制系统是一个典型的双闭环系统,内环为励磁电流控制环,外环为电枢电流控制环。
由图3可得系统的输出为:

(1)
2.2 电动机转速控制原理
发电机转速控制的基本原理是在电枢电流恒定的情况下,调节发电机的励磁电流,以此控制发电机的转速。控制系统原理图如下。
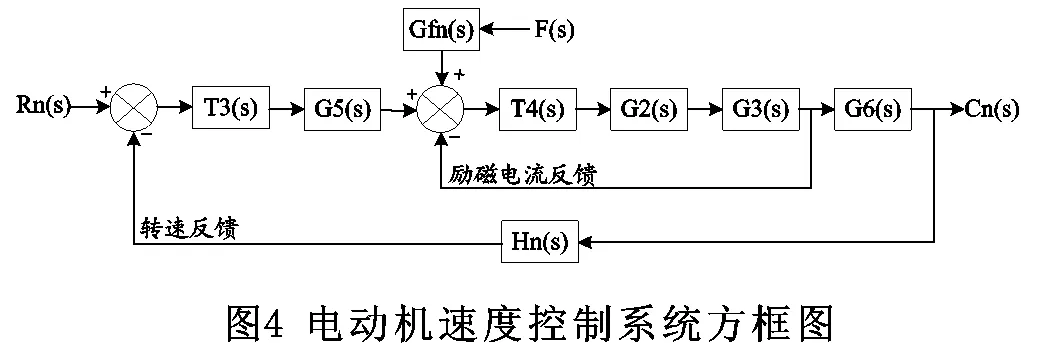
图中,R()——转速设定值,C()——转速实际值,T()——外环控制器,G()——发电机在恒定电枢电流下转速到励磁电流的传递函数,T()——内环控制器,G()——整流装置输出电流到触发角的传递函数,G3(s)——整流装置,G()——发电机,H()——转速反馈通道传递函数,()——负载扰动,n()——负载扰动对电动机励磁电流影响的传递函数。
由图4可得系统的输出为:

(2)
3 过流故障的机理分析
下面根据控制原理图分析过流故障的机理。
3.1 主回路电枢电流反馈信号失真引起的过流故障
正常情况下,电枢电流反馈通道传递函数()=1,由此,反馈信号失真等效为()≠1,分为两种情况:()>1,()<1。
设()=,根据式(1),得系统输出为(设扰动()=0):

(3)-(1)得:
当()=<1时,1()-()>0,即系统输出增大,可能发生过流故障。
因为控制系统无法消除反馈通道引起的误差[3],因此要想避免此类过流故障的发生,只能采取提高反馈通道的稳定性和精度的措施,在反馈通道的设计过程中应予以考虑。
3.2 负载波动引起的过流故障
设()=,根据式(1),得系统输出为(设输入()=0):
根据控制原理,控制系统对负载扰动的稳态误差为零,但负载变化后,控制系统会有一定时间的动态调节过程,当负载F(s)=b较大时,或其有较大波动时,根据式(4),在控制系统调节初期,会引起电枢电流的增大或波动,进而可能发生过流故障。要避免此类过流故障的发生,可以采取在励磁电流控制内环增加限制环节或惯性环节,以控制电流的数值及数值变化的速度。
4 结束语
本文对消磁推进控制系统的主回路过流故障的机理进行了研究,分析了主回路电流和速度控制的基本原理,从控制系统的角度分析了过流故障产生的原因。本文的研究可为相关消磁推进控制系统的设计提供参考。
[1] 车忠权. 消磁作用的探讨及应用[J]. 资源信息与工程, 2016, (2): 10-13.
[2] 尔桂花,窦曰轩. 运动控制系统[M]. 北京:清华大学出版社, 2002:45-50.
[3] 李友善. 自动控制原理[M]. 北京:国防工业出版社, 2005: 87-95.
Overcurrent Fault Analysis of Main Loop in Constant Current Propulsion Control System
Yang Ming1, Wu Zuqiao2
(1. Naval Representatives Office in Dalian Area, Dalian 116021, Liaoning, China; 2. Zhoushan Wonderful Marine Design Co., Ltd, Zhoushan 316101, Zhejiang, China)
TM762
A
1003-4862(2017)05-0008-03
2016-12-15
杨明(1973-), 男,高级工程师。研究方向:舰船监造。
