三相异步电机机械特性的串联电容校正策略
2017-10-14张德孝
张德孝
三相异步电机机械特性的串联电容校正策略
张德孝
(渤海船舶职业学院,辽宁兴城 125105)
三相异步电动机因其机械特性为多值函数这一缺陷,限制了其在波动负载及大负载起动工作场合的应用。本文采用在转子回路串接电容的校正策略,能够对三相异步电动机机械特性的多值函数缺陷段进行完全校正,从而使得三相异步电动机的电力拖动指标得以颠覆式提升。
三相异步电动机 机械特性 多值函数 起动转矩
0 引言
三相异步电动机因结构简单、运行可靠、重量轻、价格便宜,得到了广泛的应用。但同时又具有致命的缺陷:由于三相异步电动机的机械特性=()的起动初始段为多值函数,便会出现负载转矩↑→转速↓→电磁转矩↓→转速↓→直至电动机堵转而烧毁;起动电流很大而起动转矩较小,难以带负载起动。
本文旨在通过对三相异步电动机的主要电气参数进行颠覆性改变,从而对三相异步电动机机械特性的缺陷进行彻底校正,从而达到近乎理想的工作状态:1)起动段具有接近恒转矩较软的机械特性,起动转矩巨大且适合于重载起动。2)运行段具有接近直流电动机的机械特性。3)将机械特性校正成单值函数,从而避免因负载波动堵转而烧毁绕组。
采用此校正策略和方案,将会使三相异步电动机的电力拖动能力得以巨大提升,应用前景广阔。
1 三相异步电动机的机械特性与仿真
1.1 三相异步电动机的电路模型与机械特性
三相异步电动机的电路模型如图1所示。

图1 三相异步电动机的电路模型
依图1得出三相异步电动机的机械特性为

式中:1-定子相电压;1-定子电压频率;1-定子电源相数;-定子绕组磁极对数;-转差率;1-定子绕组相电阻;-定子绕组相漏感抗;-折算到定子侧的转子相电阻;-折算到定子侧的转子相漏感抗;-定子绕组相励磁电流;m-定子绕组相励磁电阻;m-定子绕组相励磁感抗;N-转子额定转速。
1.2 三相异步电动机机械特性的MATLAB仿真
将式1中的物理量替换为MATLAB编程语言符号格式:1-、1-、1-、-、-、-、N-,并设定物理量参数。用MATLAB进行编程,应用程序如下:
clc
clear
=380;=50;=1.375;=1.2;=2.43;=4.4;=2;=3;=1458;
=60*/;
=2**/;
for=0:;
=(-)/;
=(+/)^2+(+)^2;
=*^2*///;
plot(,,'-')
hold on
end
xlabel('转矩[N,m]]');ylabel('转速[r/min]');
title('机械特性')
grid on
axis([0 180 0 1600])
运行应用程序,得出三相异步电动机机械特性的仿真曲线如图2所示,且仿真曲线上的AB段即是其致命缺陷段,三相异步电动机的诸多缺点均源于此。由图2可以得出:起动转矩st1≈62 N·m,最大转矩m1≈165 N·m。
2 校正后三相异步电动机的机械特性与MATLAB仿真
2.1 校正后三相异步电机的电路模型与机械特性

图2 三相异步电动机机械特性的仿真曲线
校正策略:在典型三相异步电动机的转子导条或转子绕组中串联电容。
校正后三相异步电动机的电路模型如图3所示。
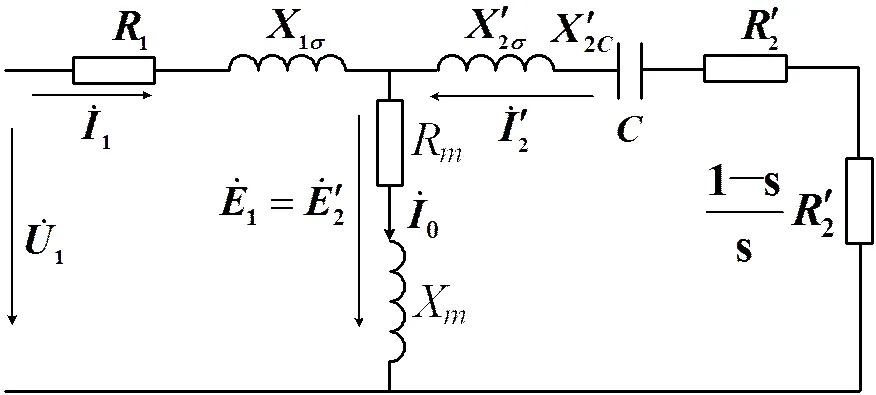
图3 校正后三相异步电动机的电路模型
依图3得出校正后三相异步电动机的机械特性为

2.2 校正后三相异步电动机机械特性的MATLAB仿真
clc
clear
=380;=50;=1.375;=1.2;=2.43;=4.4;=2;=3;=1458;=0.00125;
=60*/; % 额定电压=380 V;电源频率=50 Hz;定子绕组电阻=1.375Ω;转子绕组电阻=1.2Ω;定子绕组感抗=2.43Ω;转子绕组感抗=4.4Ω;极对数=2;相数=3;转子转速=1458 r/min;定子绕组串联电容=0.00125 F;同步转速表达式=60*/
=2**/; % 角频率设为
=70/2***; % 设容抗折算系数=电压比*电流比=70
for=0:; % 转速变化范围
=(-)/; % 转差率计算
=(+/)^2+(+x2-)^2; % 单相等效总阻抗简化计算
=*^2*///; % 电磁转矩
plot(,,'-')
hold on
end
xlabel('转矩[N,m]]');ylabel('转速[r/min]');
title('机械特性')
grid on
axis([0 600 0 1600])
运行应用程序,得出校正后三相异步电动机机械特性的仿真曲线如图4所示,可以看出:普通三相异步电动机机械特性的致命缺陷得以完全校正,使得三相异步电动机的诸多缺点得以彻底克服。由图4可以得出:st2=m2≈500 N·m,校正后的起动转矩近似为原来的8倍。在具体进行仿真时,电容的数值可以选不同的数值进行校正试验,直至机械特性校正到如图4所示的最佳状态为止。

图4 校正后三相异步电动机机械特性的仿真曲线
3 结论
通过在三相异步电动机的转子绕组中串联设定参数的电容,能够对三相异步电动机机械特性的多值函数缺陷段进行完全校正,机械特性趋于完美,校正后三相异步电动机具有如下优点:
1)起动转矩巨大且适合于重载起动;2)起动初始段具有恒转矩的起动特性;3)额定运行段具有较硬的机械特性;4)能够避免因负载波动堵转而烧毁电动机绕组;5)会使三相异步电动机的电力拖动能力提以巨大提升,应用前景广阔,经济价值巨大。
[1] 黄群. 电容转子异步电动机[J]. 电气时代, 2006, (3):84-87.
[2] 朱春鸯, 周政新. 三相异步电动机调速机械特性仿真分析[J]. 上海第二工业大学学报, 2012, (4):288-295.
[3] 洪乃刚. 电力电子、电机控制系统的建模和仿真[M].机械工业出版社, 2010:127-130.
[4] 范影乐. Matlab仿真应用详解(第2版)[M]. 人民邮电出版社, 2002.
Series Capacitor Correction Strategy of Mechanical Properties for Three-Phase Asynchronous Motor
Zhang Dexiao
(Bohai Shipbuilding Vocational College, Xingcheng 125105, Liaoning, China)
TP306
A
1003-4862(2017)05-0024-03
2016-10-15
张德孝(1964-),男,副教授。研究方向:电机工程。