平面涡卷弹簧助力器设计及应用
2017-10-13朱文华
蔡 宝,朱文华
(上海第二工业大学工程训练中心,上海201209)
平面涡卷弹簧助力器设计及应用
蔡 宝,朱文华
(上海第二工业大学工程训练中心,上海201209)
提出了一种弹簧助力器的改进装置,可用于金属容器等法兰盖上,便于轻松地打开容器的法兰盖。阐述了该种装置的设计原理,计算了涡卷弹簧的受力和强度;提出了能够调节角度的锯齿结构,绘制了装置的三维模型和设计简图,提供了实际工程使用案例;开发了基于Unity3D软件的虚拟弹簧助力器装置学习系统,增加了该种结构助力器应用和推广的可能性。
平面涡卷弹簧;弹簧助力器;法兰盖;强度计算;Unity3D
0 引言
平面涡卷弹簧在机械工业设备中的应用十分广泛,尤其在中压开关、微电机和汽车领域应用较为突出,目前许多工程技术人员已应用平面涡卷弹簧解决了大量实际工程问题,如基于涡卷弹簧的机械储能式发电设备[1],采用了外接铰链的平面涡卷弹簧结构作为阻尼的划船运动建设器[2],将平面涡卷弹簧势能作为动力的自行小车[3]。
本文针对化工行业使用的钢制容器,利用平面涡卷弹簧设计出一种新型的助力器装置。化工容器中常常设计有法兰盖用于打开和关闭容器,以达到保压功能,一般较大型的容器法兰盖多在50 kg以上,若法兰盖要求经常打开,则必须两个操作人员共同完成,基于以上问题本文设计的弹簧助力器能有效减轻操作人员的工作强度并将打开和关闭法兰盖的危险降到最低。
1 实际问题
1.1 实际问题描述
弹簧助力器要求安装在容器连接法兰和法兰盖之间,要求开启的法兰盖质量为56 kg,弹簧助力器中心到法兰盖中心的距离约为490 mm,弹簧助力器打开角度约为100°,涡卷弹簧的使用寿命要求在1 000次以上,根据以上基本条件设计弹簧助力器的结构并进行相关的强度校核。
1.2 关键部件描述
本文使用的弹簧是非接触式平面涡卷弹簧,如图1所示,该种弹簧材料为二级强度热处理钢带(60Si2MnA),其许用抗拉强度σb为1 568 MPa[4],弹簧助力器的核心部件便是该平面涡卷弹簧,这种弹簧属于非接触式,使用时必须根据连接部件的结构自行设计弹簧支撑或者连接件。

图1平面涡卷弹簧Fig.1 Planespiral spring
图2 所示为弹簧基本参数,其宽度b为80 mm,厚度h为6 mm,弹簧自由状态下缠绕圈数为3.5圈,工作圈数为0.25圈,弹簧的展开长度为1 462 mm。

图2 弹簧基本参数(mm)Fig.2 Basic parametersof spring(mm)
2 弹簧受力理论计算
2.1 提出假设
对弹簧助力器进行理论计算前首先对助力器的使用情况做出3点合理的假设,该步骤是正确设计和使用弹簧助力器的前提:
(1)假设单人打开法兰盖时只能提供20 kg的力(200 N),其他部分都需靠助力器开启。
(2)助力器工作时通过旋转齿盘调节弹簧,使得法兰盖在只受重力情况下自然下落到与水平面的夹角成30°(即图3所示的压紧与平衡状态夹角)。

图3 4种工作状态Fig.3 Four kindsof working conditions
为了方便研究,规定法兰盖以下4个状态(见图3):
(1)压紧状态。人孔盖完全闭合,盖面呈水平状态。
(2)平衡状态。人孔盖自然垂落,法兰盖重力与弹簧力平衡的状态。
(3)竖直状态。人孔盖达到最大高度,法兰盖面与水平面垂直的状态。
(4)自然状态。涡卷弹簧不储存能量,处于不工作的自然状态,法兰盖靠固定架结构支撑的状态。
2.2 弹簧最大变形角计算
如前所述,弹簧助力器打开角度约为100°,而基于2.1节中提出的假设,要关闭法兰盖,单人提供的作用力为200 N,则该作用力产生的扭矩为:

在机械工业部关于平面涡卷弹簧的校核公式[5],查得弹簧变形角度与所受转矩满足下列关系:

式中:系数K取1.25,T为扭矩(此处可取为转矩T人);E为材料弹性模量;I为材料截面惯性矩,查机械设计手册得到该种弹簧材料的弹性模量E=206 GPa,弹簧截面惯性矩可由下式得到(b为弹簧宽度,h为弹簧高度):

假设弹簧从自由状态到平衡状态过程的变形角为θ,则在人孔盖打开角为30°时,人孔盖重力提供的转矩等于弹簧承受的转矩,即:
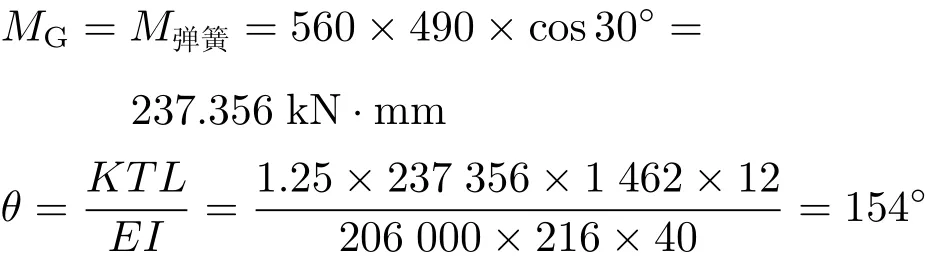
涡卷弹簧从自由状态达到平衡状态需要转动154°,如果初始打开角为30°,弹簧的打开角度最少为124°(不考虑助力器结构时),满足使用要求。在实际结构中,法兰盖打开角在尚未达到自然状态时即与助力器固定架接触而处于静止。
2.3 法兰盖闭合角度计算
根据式(1),法兰盖从平衡状态到压紧状态,单人产生施加扭矩可将涡卷弹簧变形角增大,公式如下:

单人提供200 N的力将涡卷弹簧变形角增大34.5°,大于装配初始的角度(30°),即单人施加200 N的力可将助力器法兰盖闭合(从平衡状态到压紧状态),闭合后拧紧法兰盖所有活接螺栓(见图3)可将法兰盖完全关闭。
2.4 法兰盖打开角度计算
法兰盖从平衡位置转到竖直位置后,重力由阻力变成推力,所以只需校核人孔盖在30°到90°过程中单人提供的200 N力能否将人孔盖打开,分别校验打开角为45°、60°和75°的3种情况下涡卷弹簧产生的转矩和单人产生的转矩能否平衡法兰盖重力产生的转矩。
(1)打开角为45°。此时弹簧转矩为:

假设单人提供200 N的力,则可产生T人=98 kN·mm的力矩。法兰盖重力力矩TG=194 kN·mm,所以T1+T人>TG。
(2)打开角为60°。此时弹簧转矩为:

同样T人为98 kN·mm,法兰盖重力力矩TG为137.200 kN·mm,所以 T2+T人> TG。(3)打开角为75°。此时弹簧转矩为:

同样T人为98 kN·mm,法兰盖重力力矩TG为137.200 kN·mm,所以 T3+T人> TG。
以上计算结果表明,在法兰盖打开角由30°到90°的过程,助力器均可将其打开。
2.5 强度计算
查阅机械设计手册,非接触式涡卷弹簧的静强度校核公式如下:

式中:n为工作转数,根据助力器固定架位置,打开角度最大为107°,即工作转数约为0.3;对于外端回转的涡卷弹簧K1取1.25,K2取2。根据式(3)计算弹簧工作应力为1 274 MPa。
弹簧寿命与其转矩作用次数有关系,[σ]=Kσb,使用次数小于1 000次时,K 取0.8;大于1 000次时,K 取0.6~0.8倍;大于10万次时,K取 0.5~0.6(0.6σb=940.8 MPa,0.7σb=1 097 MPa,0.8σb=1 254 MPa)。根据强度计算结果,弹簧工作次数在1 000次以上时才有可能发生塑性变形而导致失效,符合设计要求。
3 弹簧助力器结构设计
3.1 弹簧助力器基本原理
弹簧属于典型的储能元件,该弹簧助力器的基本工作原理是在关闭法兰盖时弹簧进行储能,而在打开法兰盖时释放能量,则操作容器工人能借助弹簧实现轻松打开法兰盖和缓冲关闭法兰盖,弹簧助力器与法兰盖位置如图4所示。
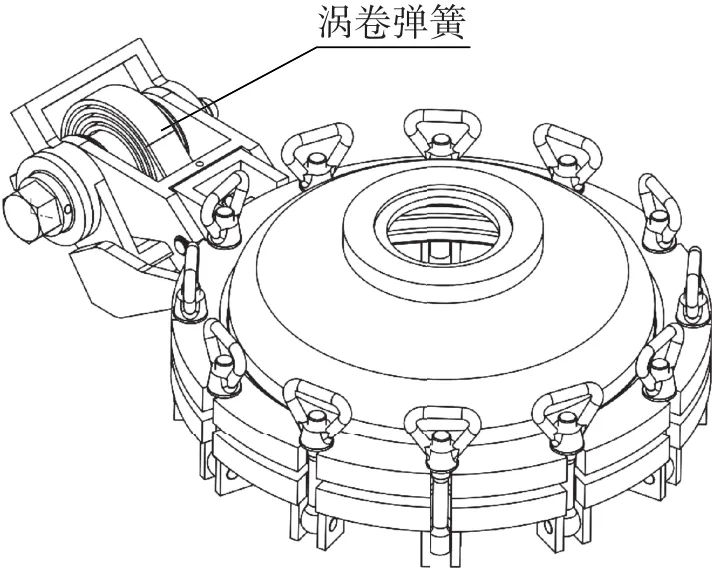
图4 位置示意Fig.4 Position indication
3.2 弹簧助力器角度调节设计
如图5所示,固定架一端加工成齿盘结构,并与1个对应的齿盘螺母相配合,便可调节齿盘螺母与固定架的啮合角度从而间接改变弹簧的储能情况。

图5 角度调节结构Fig.5 Angle adjusting structure
3.3 弹簧助力器基本结构
图6为该装置的三维模型,图7为其总装图,涡卷弹簧通过定位键安装在弹簧轴上,弹簧轴通过定位键与固定架相连,弹簧助力器装配完成后可整体焊接在容器上,弹簧助力器的活动架与法兰盖焊接,弹簧助力器的固定架与容器的机体法兰焊接,焊接时首先将助力器与容器点焊,测试助力器打开和关闭的效果,如果打开或者关闭方便则再进行整体焊接。
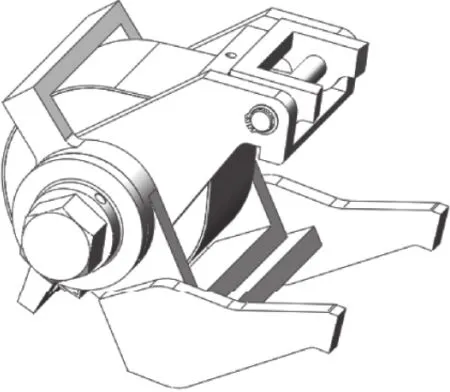
图6 弹簧助力器模型Fig.6 Model of spring booster
4 弹簧助力器现场测试
图8为车间加工、装配后弹簧助力器的使用情况,经过安装调试后焊接于容器法兰上,通过调整齿盘的啮合角度使得操作人员能够轻松打开和关闭法兰盖(由于涉及结构保密问题,现场测试是用保护罩罩住弹簧助力器)。
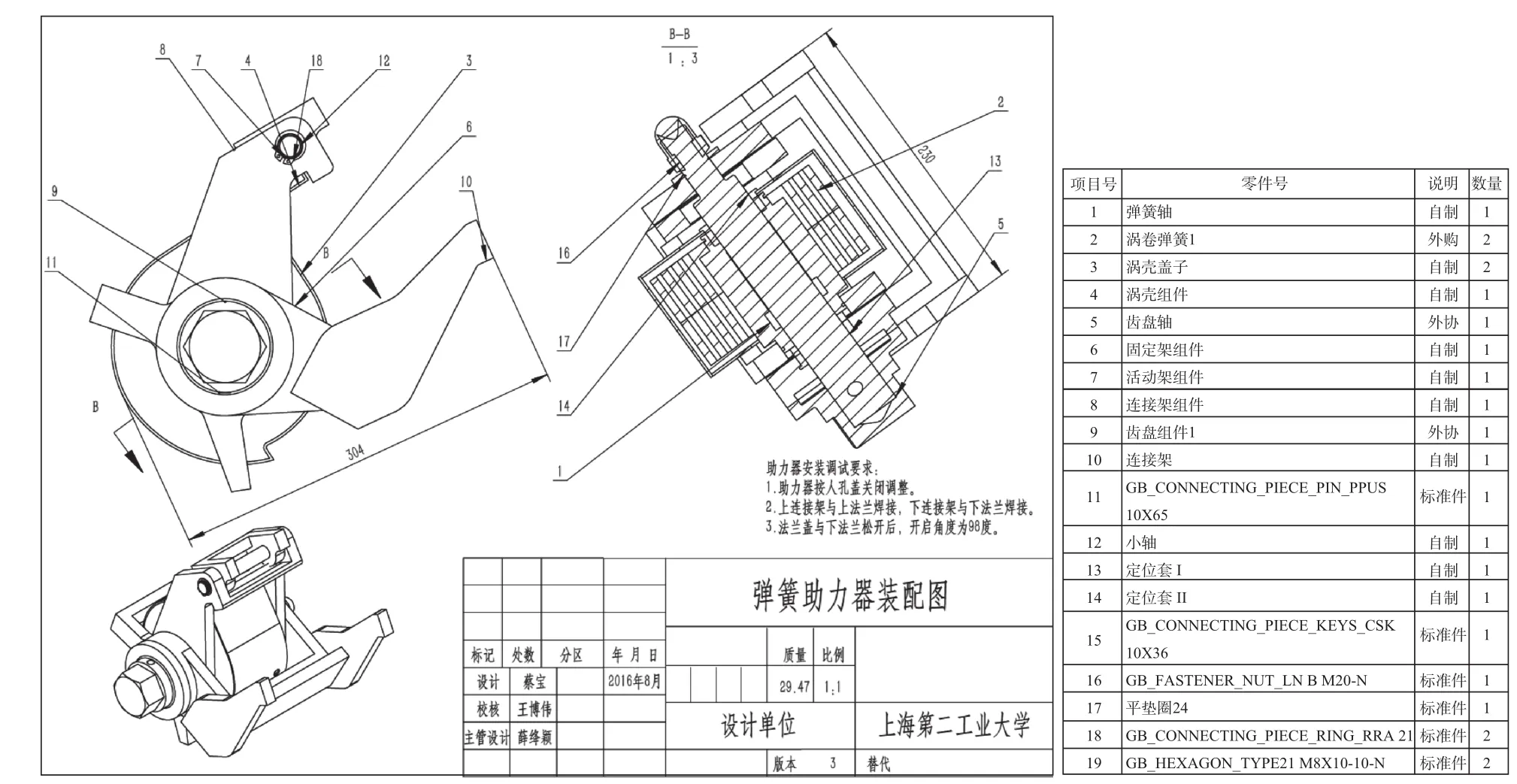
图7 弹簧助力器工程图纸Fig.7 Engineering drawing of spring booster

图8 实际弹簧助力器调试现场Fig.8 Practical scene of spring booster debugging
5 虚拟弹簧助力器应用
该种助力器装置结构创新后适用性更强,现场测试效果良好,故在此基础上制作了虚拟弹簧助力器的学习和推广软件,保证了产品后续的连续开发性。本文拟用Unity3D游戏引擎开发软件开发出虚拟弹簧助力器结构认识和虚拟装配系统[6]。
Unity3D是一个可以轻松创建三维视频游戏、建筑可视化、实时三维动画等类型互动内容的多平台开发工具[7-9],本文借助Unity3D开发软件将前述的弹簧助力器三维模型资源导入,结合Unity3D交互性强的特点开发出弹簧助力器相关学习和推广场景[10]。
5.1 虚拟弹簧助力器系统的实现
通过调用Unity3D内部的相关函数,可实现对应的开发功能,以下是系统调用的典型函数举例:
(1)场景间切换调用Application函数,实现语句Application.LoadLevel(“Scene”)。
(2)Unity3D开发的系统中的可交互性是一个重要特点,界面中的按钮标签等交互控件均可通过调用OnGUI()函数实现,该函数中均可调用相应的方法涉及例如按钮的位置、字体的大小颜色等;另外课程测试中客观题的设计也调用了toggle等交互控件函数。
(3)场景的旋转缩放则通过调用射线函数和Lerp函数等进行实现,函数调用语句如下:
ray=Camera.main.ScreenPointToRay
(Input.mousePosition);
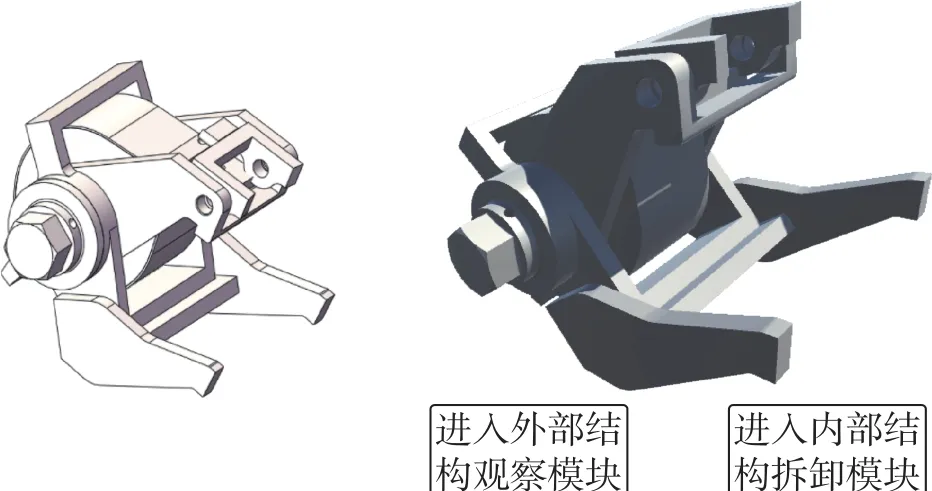
图9 虚拟弹簧助力器场景Fig.9 Virtual scene of spring booster
transform.rotation = Quaternion.Lerp (transform.rotation,mRotation,Time.deltaTime*Damping)。
(4)模型的移动和旋转则通过Unity3D的免费插件iTween动画库来实现,它能够实现子模型的复杂运动,典型程序如:
iTween.MoveBy(gameObject,iTween.Hash(“y”,5,“easeType”,“easeInOutExpo”,“loopType”,“none”,“delay”,.5))。
5.2 虚拟弹簧助力器场景
图9为虚拟弹簧助力器场景,虚拟弹簧助力器的应用分为2个模块:外部结构观察和内部结构拆卸。图10为虚拟弹簧助力器拆卸场景,在该场景中能将助力器核心的6个零部件进行拆解演示,推广该种结构助力器的应用范围。

图10 虚拟拆卸场景Fig.10 Virtual disassembly scene
6 结语
本文对传统的弹簧助力器装置进行了创新,提出了能够调节法兰盖打开角度的锯齿结构,通过理论计算、三维建模、实际案例等过程,验证了该种改进结构的弹簧助力器装置工程运用的可能性,同时开发了虚拟弹簧助力器学习系统,增加了该种结构弹簧助力器的推广应用,同时也为同类型产品的设计和研发提供指导。
[1] 段巍,冯恒昌,王璋奇.弹簧储能装置中平面涡卷弹簧的有限元分析[J].机械工程学报,2011,9(4):493-498.
[2] 沈波.平面涡卷弹簧的应用[J].机械,2001,28(5):19-20.
[3] 邹光明,杨秀光,黄川,等.以势能驱动的涡卷弹簧储能小车研究[J].机械设计,2012,29(4):32-35.
[4] 成大先.机械设计手册.[M].5版.北京:化学工业出版社,2010.
[5] 中华人民共和国机械工业部.中华人民共和国机械行业标准-平面涡卷弹簧设计标准:JB/T 5438-2008[S].北京:机械工业出版社,1995:1-13.
[6] 马越超.基于Unity3D的三维数字校园漫游平台[J].包头职业技术学院学报,2016,17(4):3-4.
[7] 梁宇涛.虚拟现实技术及其在实验教学中的应用[J].实验技术与管理,2006,23(3):81-85.
[8] 蔡红霞,胡小梅,俞涛.虚拟仿真原理与应用[M].上海:上海大学出版社,2010.
[9] 朱文华.虚拟现实技术与应用[M].上海:上海科学普及出版社,2007.
[10]郭静,朱学江,袁艺标.Unity3D在基础医学虚拟仿真实验教学中的运用[J].科技视界,2016(24):48-49.
Abstract:An improved device for a spring booster was proposed,which could be used for metal containers and other fl ange cover,so that the fl ange cap for the container could be easily opened.The design principle of the device was expounded,and the force and strength of the plane spiral spring were calculated.A sawtooth structure which could adjust the angle is proposed,and the 3D model and design sketch of the device were plotted,and the practical engineering cases were provided.Finally,the learning system of virtual spring booster device based on Unity3D software was developed,which could increase the possibility of the application and extension of thiskind of structure booster.
Keywords:plane spiral spring;spring booster;fl ange cap;strength calculation;Unity3D
简 讯
上海第二工业大学获2017年度“联盟计划”立项资助
2017年度“联盟计划”资助项目名单公布,上海第二工业大学4个项目经过与招标企业对接、专家评审等环节,最终获得资助,资助金额共计40万元。项目分别为张利的“块体光催化材料及污水处理的塔式光催化反应技术”,张承龙的“废弃电路板中贵金属的高效绿色资源化技术”,周平的“焊接机器人焊缝精确定位工艺参数优化系统”,杨敬辉的“草原农机设备预防性维护云平台系统”。
“联盟计划”项目是由上海市教育发展基金会和上海科技成果转化促进会为贯彻落实科学发展观,促进产学研结合,帮助科技型中小企业解决技术难题而联合推出的。2017年度“联盟计划”全市共有74个项目入选,共资助总金额684.4万元。
Design and Application of Plane Spiral Spring Booster
CAIBao,ZHU Wenhua
(Engineering Training Center,Shanghai Polytechnic University,Shanghai201209,China)
TH 122
A
1001-4543(2017)03-0203-06
10.19570/j.cnki.jsspu.2017.03.008
2017-04-10
蔡 宝 (1989–),男,江苏南通人,助理工程师,硕士,主要研究方向为虚拟制造与增材制造技术。E-mail:caibao@sspu.edu.cn。
上海第二工业大学校基金项目(A01GY17EX50),上海第二工业大学校重点学科建设项目(A20NH1609B20-13)资助
