防空指挥控制系统模拟平台框架设计
2017-10-13孙学锋李成新
孙学锋,李成新
防空指挥控制系统模拟平台框架设计
孙学锋1,李成新2
(1. 海军航空工程学院,山东烟台264000;2. 解放军91004部队,辽宁大连 116031)
针对防空设计的指挥控制系统,将任务、实体和模型关联起来,采用一定的驱动机制,通过作战模型的计算来模拟实际的作战环境、作战过程和作战效果,采用面向服务思想建立核心服务、扩展服务,统一服务接口,从而使核心框架可以按照统一的方式来管理各种服务。核心服务用于控制作战模型的运行过程,扩展服务包含作战任务、作战实体、作战模型的管理服务等。
防空 指挥控制 模拟平台框架 模型驱动
0 引言
现代局部战争表明,信息条件下的空袭与反空袭作战是基于C4ISR系统的体系对抗作战,防空指控系统作为国家防空体系的重要组成部分,对国土防空能力形成具有直接影响。本文设计了基于服务的防空指挥控制模拟平台框架,按照“在满足核心功能的基础上,具有高度可扩展性”的原则进行构建,描述了模型组件、驱动机制、任务建模等方法,设计了对空观察的算法及模型,有效解决防空指挥训练难题,实现防空指挥手段的信息化需求。
1 模拟平台框架结构及服务
1.1 模拟平台框架结构
模拟平台框架[1]主要分为两个服务层:核心服务层和扩展服务层。
核心服务层包含了模拟框架运行所必需的核心服务,主要用于控制作战模型的运行过程,包括提供统一的时间服务,驱动模型运行的调度服务,管理各种事件的事件服务和用于记录信息的日志服务。
扩展服务层主要由作战任务、作战实体、作战模型管理服务以及其它相关服务组成,其主要目标是使作战实体根据作战任务驱动作战模型进行运算,并为作战模型的计算提供最基本的数据标准(如装备性能、武器指数等)、计算服务(如地理信息、地形分析、电磁环境、气候水文、兵要地志信息等)和数据通信服务。
模拟平台部署在系统的应用服务器上,与服务器总线相连,是在面向组件基础之上对系统的进一步解耦和封装。模拟平台核心架构支持将一个大型项目的业务转换为一组相互链接的服务或可重复的业务任务,其它软件系统或是模块可在需要时访问和使用这些服务提供的功能。模拟平台框架结构如图1所示。
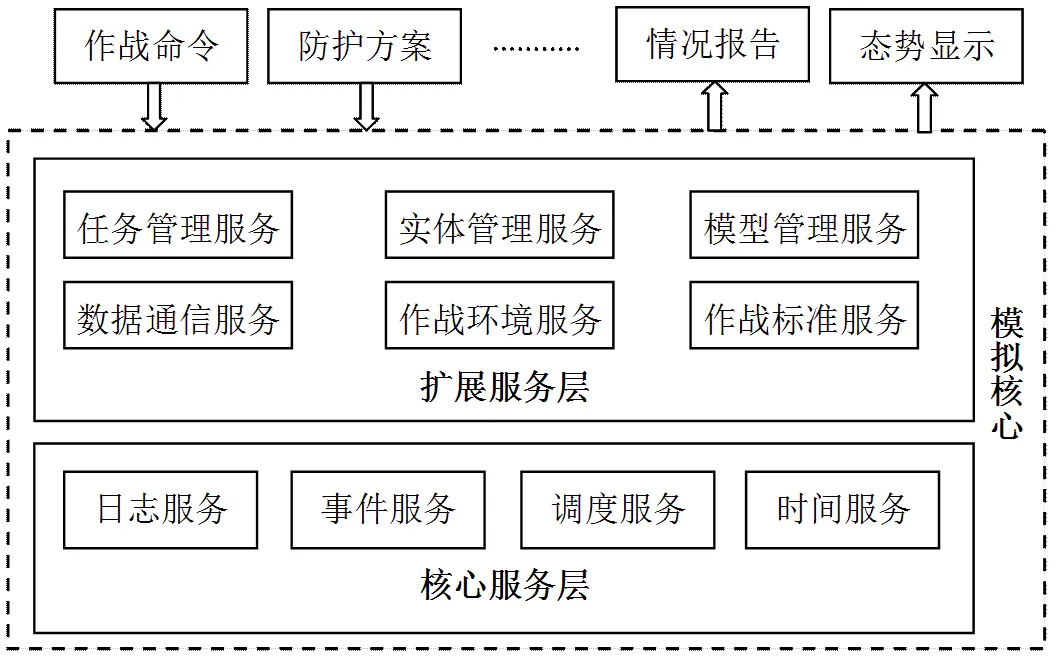
图1 模拟平台框架结构图
1.2 模拟服务及其接口形式
模拟平台通过服务总线实现了应用程序间交互的松耦合,它将应用程序的不同功能单元即服务,通过在服务间定义良好的接口[2]和契约联系起来。接口定义采用中立的方式,独立于实现服务的硬件平台、操作系统和编程语言,使得这些服务可以使用统一和标准的方式进行通信。面向服务的架构使得服务的请求者和提供者之间实现了高度解耦,其优势在于:一是增强了其适应变化的灵活性;二是当某个服务的内部结构和实现逐渐发生改变时,不影响其他服务。
采用面向服务思想所建立的模拟平台框架中核心服务、扩展服务及服务与作战模型之间的关系和接口如图2所示。所有的服务都具有统一的服务接口(IService),从而使得核心框架可以按照统一的方式来管理各种服务;各种不同的服务在继承统一服务接口的基础上,具有各自形式的接口,上层用户可按照需求查询和使用所有核心服务和扩展服务;核心服务和扩展服务都通过模拟器接口(ISimulator)进行管理;作战模型通过模拟器接口(ISimulator)来查询和使用服务。
无论是核心服务还是扩展服务,它们都有自身基本的接口类型,比如核心服务中的事件服务,其基本接口主要有:
AddEvent:在事件服务中增加一个事件类型,并指定名称和标识。RemoveEvent:从事件服务中删除一个事件类型。Subscribe:订购一个事件类型,当发生该事件类型时,事件服务调用相应的事件处理接口(Event Handler)。Unsubscribe:解除对一个事件类型的订购。Emit:触发一个特定的事件类型,给出触发者和事件参数,并调用所有订购该事件的模型和服务的处理接口。
再比如扩展服务中的实体管理服务,主要用于实现作战实体的创建、维护、存储和恢复等。作战实体管理服务的总体结构如图3所示,其基本接口主要有:
AddEntity:增加一个作战实体到实体管理服务中。RemoveEntity:从实体管理服务中删除一个作战实体。GetEntity:获取一个作战实体。

图2 模拟服务及其接口形式
2 模型组件、驱动机制及任务建模
2.1 模型组件
信息化条件下,作战空间不断拓展,作战任务日趋复杂,许多新的作战思想和战术手段不断涌现,军事需求和技术领域都在不断的进步和发展,这就使作战仿真模型的建设具有长期性、反复性和发展性。因此,把作战行动过程进行适当抽象,以组件形式来构建作战模型[3]可有效地缩短模拟系统的建设周期,降低系统的开发成本,提高系统的适应性。
防空指挥控制系统的作战行动模型即采用组件的方式进行构建,每个作战行动模型具有统一的接口形式,能够通过模拟核心服务查询和获取各种服务及其所需的其它作战模型。统一的接口形式可以在不影响模拟系统整体框架的前提下,实现作战行动模型的无缝替换和更新。

图3 作战实体管理服务总体结构图
2.2 模型驱动机制
模拟服务驱动作战模型[3]运行,进而模拟实际的作战过程需要解决三个关键问题:一是如何处理作战任务,二是如何模拟作战行动,三是如何处理后继事件。因此,模拟服务驱动作战模型运行的过程主要分为三个部分,一是事件管理部分,即以事件的方式接收和管理各种作战计划、命令以及行动模型产生的各种反馈信息;二是任务管理部分,即以作战实体为载体,对各种事件进行响应,并负责协调控制作战实体的行为;三是行动模拟部分,即根据作战任务驱动行动模型执行。其中,任务管理部分是核心,它既是将作战计划、作战命令和作战行动模型关联起来的桥梁,也是对行动模拟过程中产生的事件进行处理,并产生新任务的枢纽,是驱动模型运行的核心。
在基于任务的模型驱动过程中,武器平台形成的作战方案和指挥员下达的各种作战命令,以及行动模型模拟过程中产生的反馈信息都以事件的方式注册在事件服务中。在模拟的过程中,一旦制订了作战方案、下达了作战命令,或是模拟过程中产生了警报车和指挥车的行动信息,那么事件服务即触发相应的事件。
“响应器”是指在系统中注册的,表明自身对某一类事件感兴趣的事件处理器,每类响应器处理一类事件,并在作战实体行动规则库的作用下,根据事件的内容产生作战实体下一步的作战任务,进而驱动作战模型运行。不同类型的作战实体都具有相应的“响应器”,并注册在事件服务中,当某类事件产生时,事件服务即查询并调用该类事件的“响应器”。
任务管理所产生的各种任务,最终以调度事件的方式加入到调度服务中,并指定相应作战行动模型开始运行的时间,间隔步长,以及运行时的基本参数。调度服务按照调度事件的需求,定时调用对应的作战模型,驱动模型运行。模型驱动机制原理如图4所示。
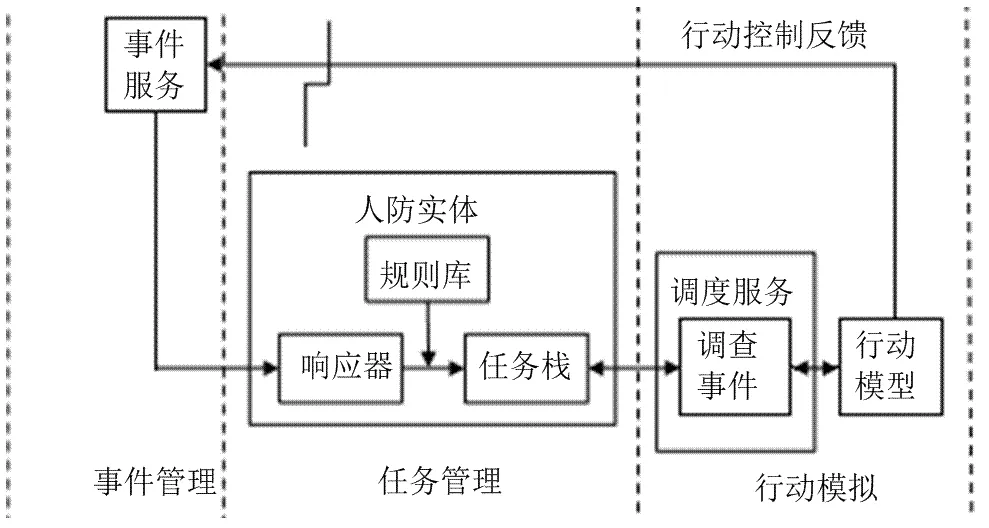
图4 模型驱动机制原理图
2.3 任务建模
作战任务是作战力量在作战中需要达到的目标和承担的责任,通常由指挥员根据我情、敌情、上级意图以及战场地形、气候等因素,在充分估计各种影响的基础上,以作战命令的方式向作战实体下达,具有非形式化、复杂化的特点,不能直接为计算机所理解和使用。因此,在模拟过程中需要针对作战任务进行建模[4],即对作战任务进行结构化和参数化。
结构化就是对作战任务逐步分解,并将其以某种方式进行排列和组织的过程。结构化的任务具有原子性、有限性、独立性和可描述性,即该作战任务不可再分解,由一个独立的作战实体承担,执行后可达到一定的作战目的,并且该任务可通过固定的、结构化的格式予以描述,这样的任务称为基本作战任务。
结构化的作战任务还需要进一步参数化,即将作战任务所需的信息提取出来,并将其表达为计算机可识别的参数,这些参数数值是可变的,表达了不同作战任务的类别,易于被计算机所识别和使用。
作战任务的结构化和参数化,使得作战任务被分解为一系列的原子任务,这些原子任务对应着不同的作战行动模型,在模拟过程中由调度服务根据需要调用相应的作战行动模型。
3 算法及模型设计
防空指挥控制系统涉及到多种任务模型的建立,算法支撑和逻辑流程设计,这里给出对空观察哨的部分数学模型和流程。
3.1 数学模型[5,6]
1)观察哨到目标的距离
假设当前时刻某点目标水平坐标(由航迹模型给出)为(,);观察哨所在位置水平坐标为(z,z),则当前时刻观察哨到该点的水平距离为:

2)目标到观察哨的飞行时间
假设目标直接飞过观察哨顶空,则:
式中,max是观察哨最大观测距离,可查阅手册获取;是气象对指挥镜观测距离的影响系数,可查阅手册获取;m是目标飞行速度(假设为匀速)。
3)当前时刻发现目标概率

4)发现目标情况
3.2 逻辑流程
对空观察哨观察是观察哨利用光学器材或目视方法,对空中目标进行搜索、识别和通报的行动。其观察流程如图5所示。
4 结论
依托本系统可完成防空演练内容设置、计划和想定设置,演练进程控制和演练导调控制,实现对防空战场环境态势的模拟,支持多级防空指挥机构带防空分队实兵的模拟演练,支持完成情报获取、预测、分析、判断、决策、组织计划、协调、通信和指挥控制等防空指挥模拟训练评估。实践证明,系统的应用对新时期多级一体化防空指控系统发展产生了积极的推动作用,军事和经济效益显著。

图5 对空观察哨观察流程图
[1] 王晔, 孙红, 王燕.一体化联合作战指挥训练系统通用模型框架研究[J].系统仿真学报, 2006, 18 (z2): 354-357.
[2] 陈振顾, 王戟, 董威等.面向服务软件体系结构的接口模型[J].软件学报, 2006, 17(6): 1459-1463.
[3] 倪忠仁等.地面防空作战模拟[M].北京: 解放军出版社, 2001.
[4] 杨世幸, 阳东升, 张维明等.作战使命分解与任务建模方法[J].火力与指挥控制, 2009, 34(8): 24-29.
[5] 娄寿春等.地空导弹射击指挥控制模型[M].北京: 国防工业出版社, 2009.
[6] 寇新洲, 杨兆民, 高晓峰, 吴传芝.高炮系统打击效能评估[J].舰船电子工程, 2011, 31(2): 27-30.
Simulation Platform Framework of Air Defense Command and Control System
Sun Xuefeng1, Li Chengxin2
(1. Naval Aeronautical Engineering Institute, Yantai 264000, Shandong, China; 2. Unit 91004 of PLA, Dalian 116031, Liaoning, China)
TP391.9
A
1003-4862(2017)04-0001-04
2016-09-09
孙学锋(1963-),男,博士,教授,硕士生导师。研究方向:陆战岸防装备保障。
E-mail: dllnlcx@163.com